Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля для обнаружения и определения местоположения наземных источников радиоизлучения, в частности коротковолнового и ультракоротковолнового диапазона.
Известен способ обнаружения и определения местоположения источника радиоизлучения, включающий прием радиоизлучения источника не менее чем в трех пространственно разнесенных пунктах приема с последующей передачей принятых радиосигналов на центральный пункт, измерение взаимных задержек между принятыми сигналами и вычисление координат по взаимным задержкам при равенстве нулю их суммы на замкнутом через пункты приема контуре (Патент РФ №2013785, G 01 S 13/00, 1994 г.).
Для узкополосных радиосигналов, имеющих широкие корреляционные пики, способ обеспечивает неприемлемо низкую вероятность обнаружения и точность определения местоположения источников. Недостатком способа является также сложность реализации, связанная с необходимостью передачи значительного объема информации с пространственно разнесенных пунктов приема на центральный пункт.
Наиболее близким к предлагаемому по технической сущности и достигаемому положительному эффекту является способ обнаружения и определения местоположения источника радиоизлучения, основанный на приеме сигнала передатчика приемниками, установленными на известных стационарных пунктах, передаче с приемников на пункт обработки данных о факте обнаружения сигналов, где по координатам приемников, принимающих сигналы, определяют местоположение объектов (Патент Франции №2630565, кл. G 08 В 7/06, 1988 г.).
В данном способе объем передаваемой информации существенно меньше, точность определения местоположения не зависит от ширины спектра излучений, однако соотношение вероятности обнаружения и точности определения местоположения носит противоречивый характер. Для уменьшения погрешности определения координат необходимо увеличивать порог обнаружения до уровня, обеспечивающего регистрацию сигнала источника только в одном пункте приема. В этом случае падает вероятность обнаружения в области между пунктами приема. Снижение порогового уровня приводит к срабатыванию обнаружителей одновременно нескольких пунктов приема, а погрешность определения местоположения достигает величины удаления объекта от геометрического центра, образованного усреднением координат приемных пунктов. Причем характеристики достоверности обнаружения и точности определения местоположения нестабильны, существенно зависят от мощности передатчика объекта, мощности шумов в приемных пунктах, флуктуации уровней сигналов при распространении радиоволн. Таким образом, основными недостатками способа являются низкая точность определения местоположения и эффективность обнаружения источника радиоизлучения.
Задачей данного изобретения является повышение точности определения местоположения и эффективности обнаружения источника радиоизлучения за счет стабилизации уровня ложных тревог.
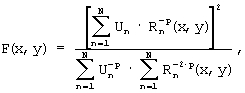
Поставленная задача достигается за счет того, что в известном способе обнаружения и определения местоположения источника радиоизлучения, включающем прием радиоизлучения источника в N≥3 пространственно разнесенных пунктах приема с последующей передачей информации о принятых радиосигналах на центральный пункт, предварительно определяют расстояние Rn(x,y) от каждой точки пространства с координатами (х,у) до каждого n=1, 2, ..., N-го пункта приема, в каждом пункте приема измеряют эффективные значения напряжения принятых радиосигналов Un, которые и передают на центральный пункт, где преобразуют их в функцию пространственной неопределенности вида  , по максимуму которой сравнением с порогом обнаружения и положению максимума определяют наличие излучения и местоположение источника, причем прием радиоизлучения выполняют с помощью идентичных приемников и антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли, параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2, а порог обнаружения определяют исходя из заданной вероятности ложной тревоги, количества пунктов приема и их координат.
, по максимуму которой сравнением с порогом обнаружения и положению максимума определяют наличие излучения и местоположение источника, причем прием радиоизлучения выполняют с помощью идентичных приемников и антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли, параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2, а порог обнаружения определяют исходя из заданной вероятности ложной тревоги, количества пунктов приема и их координат.
При этом значение и положение максимума функции пространственной неопределенности оценивают в окрестности точки с координатами, равными средневзвешенным координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени  .
.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного наличием, во-первых, новых действий над сигналом: измеряют эффективные значения напряжения принятых радиосигналов, определяют расстояние от каждой точки пространства до каждого пункта приема, преобразуют измеренные эффективные значение напряжения в функцию пространственной неопределенности, наличие излучения и координаты источника определяют по максимуму функции пространственной неопределенности и его положению, во-вторых, нового порядка выполнения действий, оборудования и условий выполнения действий: передают на центральный пункт измеренные значения напряжения принятых радиосигналов, прием радиоизлучения выполняют с помощью идентичных приемников и идентичных всенаправленных в горизонтальной плоскости антенн с одинаковыми высотами поднятия над поверхностью Земли, параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2, порог обнаружения определяют исходя из заданной вероятности ложной тревоги, количества пунктов приема и их координат, значение и положение максимума функции пространственной неопределенности оценивают в окрестности точки с координатами, равными средневзвешенным координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени .
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
Физической основой достижения положительного эффекта является учет зависимости напряженности поля источника от расстояния, которая обратно пропорциональна первой степени расстояния р=1 при распространении радиоволн в свободном пространстве или над крышами высотных зданий, и второй степени р=2 при распространении радиоволн вблизи земной поверхности [Грудинская Г.П. Распространение радиоволн. М.: Высш.школа, 1975, стр. 71, 200], [Итоги науки и техники. Радиотехника. Т.42, М., ВИНТИ, 1991, стр. 9-16, 56, 87-88].
Статистический синтез с учетом указанной зависимости при неопределенности о пространственном положении источника излучения, амплитуде и фазе радиосигналов в пунктах приема, дисперсии шума, флюктуациях уровней сигналов при распространении радиоволн приводит к необходимости обработки совокупности эффективных значений напряжения принятых радиосигналов в соответствии с предложенным порядком.
Преобразование достаточных статистик (эффективных значений напряжения радиосигналов) в решающую статистику согласно изобретению (преобразование эффективных значений напряжения радиосигналов в функцию пространственной неопределенности) обеспечивает учет информации о сигналах всех пунктов. Представление решающей статистики в виде отношения обеспечивает ее инвариантность к дисперсии шума, что позволяет стабилизировать уровень ложной тревоги, а объединение в решающей статистике информации о совокупности эффективных значений напряжения принятых радиосигналов - повысить вероятность правильного обнаружения и точность измерений.
Именно интегральный учет информации о сигналах всех пунктов приема и зависимости напряженности поля источника от расстояния в соответствии с предложенными новыми действиями и порядком их выполнения позволяет повысить точность определения местоположения источника радиоизлучения при стабилизации уровня ложных тревог.
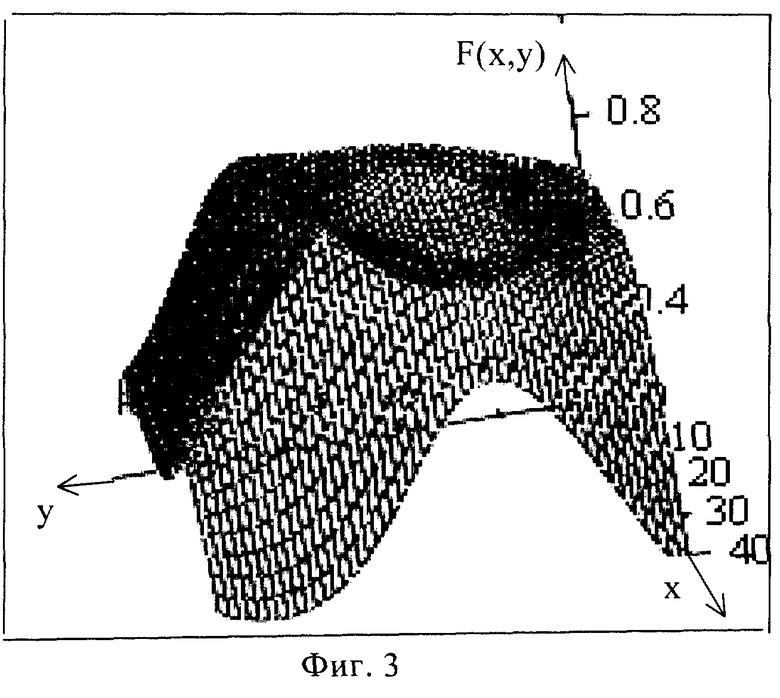
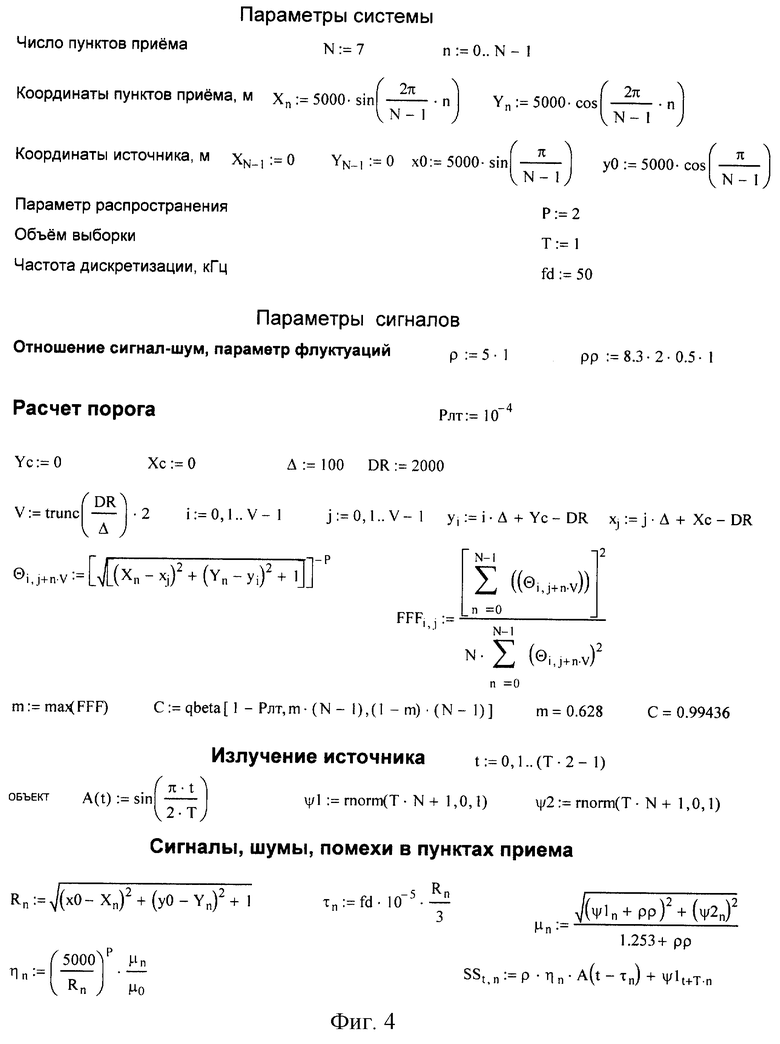
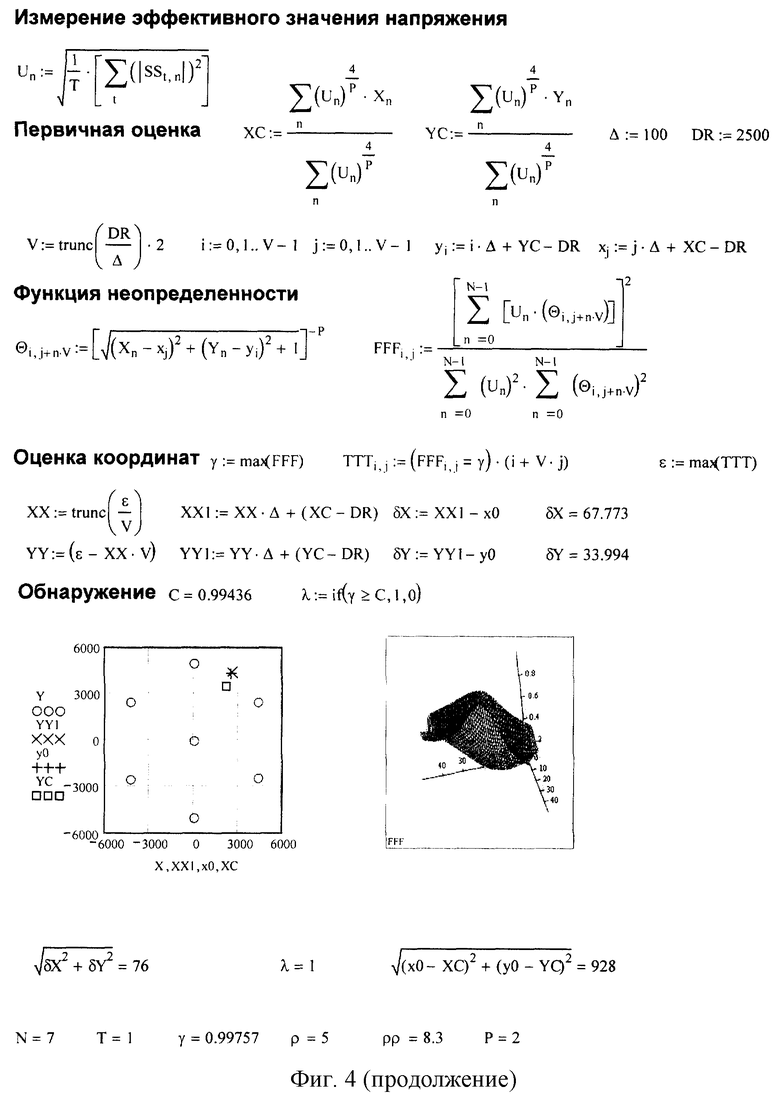
На фиг.1 приведена структурная схема системы обнаружения и определения местоположения источника радиоизлучения, реализующей предложенный способ, на фиг.2 - пример функции пространственной неопределенности, на фиг.3 - взаимное размещение пунктов приема в прямоугольной системе координат (кружками показано размещение пунктов приема, плюсом - источника радиоизлучения, крестиком - оценка местоположения, квадратиком - первичная оценка местоположения), на фиг.4 - программа исследовательской модели в системе Mathcad-2000.
Система, реализующая предложенный способ, содержит пространственно разнесенные пункты приема 1.1-1.N, каждый из которых включает приемную антенну 2.1 (2.N), подключенную к первому входу измерительного приемника 3.1 (3.N), выходом подключенного к первому входу аппаратуры передачи данных 4.1 (4.N), и центральный пункт 5, содержащий аппаратуру передачи данных 6, усреднитель 7, постоянное запоминающее устройство 8, буферное запоминающее устройство 9, квадраторы 10.1-10.3, умножители 11.1-11.2, накапливающие сумматоры 12.1-12.3, делитель 13, оперативное запоминающее устройство 14, устройство определения максимума 15, пороговый элемент 16.
Первые выходы аппаратуры передачи данных 4.1 (4.N) каждого из пунктов приема 1.1-1.N связаны линиями связи с входом аппаратуры передачи данных 6 центрального пункта 5. Второй выход аппаратуры передачи данных 6 связан со вторыми входами аппаратуры передачи данных 4.1 (4.N), вторые выходы которых соединены со вторыми входами измерительных приемников 3.1 (3.N). Первый выход аппаратуры передачи данных 6 соединен с входами усреднителя 7 и буферного запоминающего устройства 9, выход которого подключен к входу квадратора 10.2 и первому входу умножителя 11.1. Выход усреднителя 7, через постоянное запоминающее устройство 8 подключен к входу квадратора 10.1 и второму входу умножителя 11.1. Выход квадратора 10.1, накапливающий сумматор 12.1 и первый вход умножителя 11.2 соединены последовательно. Выход умножителя 11.1 через накапливающий сумматор 12.2 и квадратор 10.3 подключен к первому входу делителя 13, ко второму входу которого подключен выход умножителя 11.2. Выход квадратора 10.2 через накапливающий сумматор 12.3 подключен ко второму входу умножителя 11.2. Выход делителя 13 соединен через оперативное запоминающее устройство 14 с входом устройства определения максимума 15 и через его первый выход - с входом порогового элемента 16. Второй выход устройства определения максимума 15 является первым выходом системы (местоположение источника), а выход порогового элемента является вторым выходом системы (факт обнаружения).
Измерительные приемники 3.1-3.N настроены на частоту объекта, управляются и синхронизируются по управляющему (второму) входу сигналами, поступающими от аппаратуры передачи данных 6 центрального пункта через вторые выходы аппаратуры передачи данных 4.1-4.N пунктов приема, обеспечивают измерение эффективных значений напряжения радиосигналов. В качестве таковых могут быть использованы измерительные приемники из состава известных измерителей напряженности поля типа FSM-8 [Курганов Л.С., Шаров Э.Э. Техника измерения напряженности поля радиоволн. М.: Радио и связь, 1982, стр. 47-48]. Информацию в постоянное запоминающее устройство 8 в виде величин, обратных степени р расстояния от каждой точки пространства до каждого пункта приема, заносят до начала функционирования системы. Параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2. Значение порога в элементе 15 фиксированное, устанавливается вне зависимости от параметров сигналов и шумов, исходя из допустимого уровня ложной тревоги, количества пунктов приема и их координат. Усреднитель 7 обеспечивает усреднение координат пунктов приема с весом, равным поступающим на его вход измеренным эффективным значениям напряжения принятых радиосигналов в степени . Приемники 3.1-3.N и антенны 2.1-2.N идентичны, последние всенаправленные в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли. Указанная идентичность и одинаковость эквивалентных высот поднятия антенн может быть обеспечена предварительной калибровкой системы по сигналам передатчика с известными координатами и введением соответствующих корректировок коэффициентов передачи приемников.
Принцип функционирования системы состоит в следующем. Радиоизлучение источника принимают в пунктах приема 1.1-1.N с помощью антенн 2.1-2.N, преобразуя в радиосигналы Sn(t), где n=1, 2, ..., N - номер пункта приема, t - текущее время. В измерительных приемниках 3.1-3-N измеряют эффективные значения напряжения радиосигналов, например путем квадратичного детектирования вида

где Т - постоянная времени интегрирования, не меньшая величины обратной ширине спектра сигнала.
Измеренные напряжения являются случайными независимыми величинами, а их среднее значение пропорционально расстоянию в степени р до пунктов приема

где х0,у0 - координаты источника радиоизлучения.
Коэффициент р равен 1 при распространении радиоволн в свободном пространстве или над крышами высотных зданий и второй степени р=2 при распространении радиоволн вблизи земной поверхности [Итоги науки и техники. Радиотехника. Т.42, М., ВИНТИ, 1991, стр. 9-16, 56, 87-88].
Константа μ определяется совокупностью факторов

где Р - мощность передатчика, h - высота поднятия антенн приемных пунктов, h0 - высота поднятия антенны объекта, H - действующая высота антенн пунктов приема, λ - длина волны излучения.
Значение константы μ при неизвестной мощности передатчика также неизвестно. Дисперсия измеренных значений напряжения определяется отношением сигнал - шум в пунктах приема, а также случайными изменениями параметра μ при распространении радиоволн. Флуктуации уровней сигналов и, соответственно, константы μ при распространении УКВ радиоволн в пригородных районах по данным [Итоги науки и техники. Радиотехника. Т.42, М., ВИНТИ, 1991, стр. 56] составляют 0,5-1,0 дБ.
В предположении неизвестных значений константы μ и дисперсии измеренных значений напряжения статистически оптимальная обработка включает максимизацию по неизвестным координатам функции неопределенности вида

Функция неопределенности (4) определяет совместную обработку совокупности результатов измерений. Поэтому измеренные значения напряжения передают по каналам связи с помощью аппаратуры передачи данных 4.1-4.N, 6 на центральный пункт 5, а последующее преобразование измеренных значений напряжения состоит в следующем.
По измеренным значениям напряжения в усреднителе 7 определяют первичную оценку местоположения источника как точку с координатами, равными средневзвешенным координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени : 
где Xn, Yn - координаты пунктов приема.
Операция (5) не является необходимым условием реализации способа, однако ее выполнение сокращает при последующей обработке зону поиска максимума функции неопределенности. Для систем "сотового" типа фиг.3 погрешность определения местоположения (5) в пределах соты не превосходит 50% от радиуса соты.
В рассматриваемом варианте реализации предусмотренные способом действия над сигналами осуществляют в дискретных точках пространства, которое ограничивают пределами 0,5 от радиуса соты в окрестности первичной оценки местоположения источника. Заданную рабочую зону системы предварительно квантуют, с шагом квантования, определяемым условием обеспечения требуемой инструментальной точности определения местоположения, определяют расстояние  от каждой точки пространства с координатами (х,у) до каждого n=1, 2, ..., N-го пункта приема, а затем - величины, обратные степени р расстояния от каждой точки пространства до каждого пункта приема
от каждой точки пространства с координатами (х,у) до каждого n=1, 2, ..., N-го пункта приема, а затем - величины, обратные степени р расстояния от каждой точки пространства до каждого пункта приема  Результаты расчета запоминают в запоминающем устройстве 8.
Результаты расчета запоминают в запоминающем устройстве 8.
Для каждой точки пространства в окрестности первичной оценки местоположения источника, поступающей с усреднителя 7, считывают величины, обратные степени р расстояния от каждой точки пространства до каждого пункта приема (Q(x,y)), и умножают их в умножителе 11.1 на измеренные значения напряжения. Указанные измеренные значения напряжения предварительно запоминают в устройстве 9 на время поступления всей совокупности измеренных значений напряжений и выполнения первичной оценки в (7).
Полученные произведения усредняют в накапливающем сумматоре 12.2 по совокупности точек приема, результат усреднения возводят в квадрат в квадраторе 10.3. Одновременно с применением квадратора 10.1 и накапливающего сумматора 12.1 усредняют по совокупности точек приема значения, обратные степени р•2 расстояния, и отдельно с применением квадратора 10.2 и накапливающего сумматора 12.3 - квадраты измеренных значений напряжения. Усредненные квадраты измеренных значений напряжения (выход блока 12.3) и усредненные значения, обратные степени р•2 расстояния (выход блока 12.1), перемножают в умножителе 11.2. Результат возведения в квадрат (выход блока 10.3) делят на произведение результатов усреднения (выход блока 11.2), получая функцию неопределенности (4), значения которой для всех дискретных точек пространства (в окрестности первичной оценки) записывают в запоминающее устройство 14.
Вид функции неопределенности показан на фиг.2. Эта функция обладает следующими свойствами. При отсутствии погрешностей измерений максимум функции расположен в точке истинного местонахождения объекта, значение функции равно 1. Когда сигнала нет, а измеренные значения напряжения случайны и распределены по закону Релея (единичная выборка, произведение времени интегрирования в (1) на ширину спектра радиосигнала равно 1), положение максимума случайное, а значение функции (4) не зависит от интенсивности шума и имеет бета-распределение

с параметрами формы

где Г(·) - гамма-функция,
Различие значений функций неопределенности при наличии сигнала и его отсутствии обусловлено изменением типа функциональной взаимосвязи между принимаемыми радиосигналами (измеренные значения напряжения обратно пропорциональны степени р расстояния и примерно одинаковы соответственно), что и служит основой обнаружения.
В блоке 15 определяют максимальное значение решающей статистики среди всех точек пространства и положение максимума


Поскольку область поиска ограничена, значение и положение максимума функции пространственной неопределенности оценивают в окрестности точки (5) с координатами, равными средневзвешенным координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени .
Максимальное значение в пороговом элементе 16 сравнивают с ранее рассчитанным порогом, при превышении которого принимают решение о наличии радиоизлучения с выдачей на выход системы результата обнаружения (выход 1 системы) и координат источника  (выход два системы, со второго выхода блока 15).
(выход два системы, со второго выхода блока 15).
Порог обнаружения определяют исходя из заданной Рл вероятности ложной тревоги, количества пунктов приема и их координат по формуле

где qbeta(•,•,•) - функция обратная бета-плотности, α, β определяются по формуле (8) с заменой в ней величины m(х,у) на его максимальное среди всех точек пространства значение  Для системы сотового типа (N=7) вида фиг.3 величина m=0,628. При этом значение порога равно С=0,98407 при вероятности ложной тревоги Рл=10-3.
Для системы сотового типа (N=7) вида фиг.3 величина m=0,628. При этом значение порога равно С=0,98407 при вероятности ложной тревоги Рл=10-3.
Эффективность изобретения выражается в повышении точности определения местоположения и эффективности обнаружения источника радиоизлучения за счет стабилизации уровня ложных тревог. Для количественной оценки выполнено моделирование способа. Моделировалась система из семи пунктов приема с размещением согласно фиг.3 (кружками показано размещение пунктов приема, плюсом - источника радиоизлучения, крестиком - оценка местоположения, квадратиком - первичная оценка местоположения). Программа модели в системе Mathcad-2000 приведена на фиг.4. Приняты следующие основные параметры: радиус соты системы 5 км, отношение сигнал-шум (амплитуды синусоидального сигнала к среднему квадратическому значению шума) в периферийных пунктах приема при размещении объекта в центре системы равно 5, флуктуации уровня сигнала при распространении УКВ радиоволн соответствуют условиям пригородной зоны 1 дБ, вероятность ложной тревоги 10-4 (порог обнаружения С=0,98407). В результате моделирования установлено, что способ обеспечивает погрешность определения местоположения около 10% от радиуса соты при удалении объекта от центра на 5 км, при этом вероятность правильного обнаружения составляет около 0,9. Вероятность ложной тревоги соответствует заданному значению. Погрешности снижаются до 2,5% и менее, а вероятность обнаружения близка к 1 при удалении объекта до 4 км. Относительно способа-прототипа обеспечивается повышение точности определения местоположения источника радиоизлучения примерно на порядок при обеспечении гарантированного 10-4 уровня ложных тревог.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2285937C2 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2014 |
|
RU2560098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИМПЛЕКСНОЙ РАДИОСЕТИ МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2008 |
|
RU2383031C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2442184C1 |

Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля для обнаружения и определения местоположения наземных источников радиоизлучения. Технический результат: повышение точности определения местоположения и эффективности обнаружения источника радиоизлучения за счет стабилизации уровня ложных тревог. Заявленный способ включает прием радиоизлучения источника в N≥3 пространственно разнесенных пунктах, передачу информации на центральный пункт, определение расстояния Rn(x,y) от каждой точки пространства (х,у) до каждого n=1, 2, ... N-го пункта приема, измерение в них эффективных значений напряжения принятых радиосигналов Un, передачу их на центральный пункт, где преобразуют их в функцию пространственной неопределенности F(х,у), по положению и значению максимума которой определяют наличие излучения и местоположение источника. Значение и положение максимума функции пространственной неопределенности оценивают в окрестности точки с координатами, равными средневзвешенным координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени 4/р. Параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2. 4 ил.
 по максимуму которой сравнением с порогом обнаружения и положению максимума определяют наличие излучения и местоположение источника, причем прием радиоизлучения выполняют с помощью идентичных приемников и антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли, параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2, а порог обнаружения определяют исходя из заданной вероятности ложной тревоги, количества пунктов приема и их координат.
по максимуму которой сравнением с порогом обнаружения и положению максимума определяют наличие излучения и местоположение источника, причем прием радиоизлучения выполняют с помощью идентичных приемников и антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли, параметр р определяют исходя из зависимости напряженности поля источника от расстояния с типовым значением 1 или 2, а порог обнаружения определяют исходя из заданной вероятности ложной тревоги, количества пунктов приема и их координат. .
.
| Устройство соединения разделяемых элементов летательного аппарата | 2015 |
|
RU2630565C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| US 4916455, 10.04.1990 | |||
| US 6505122 B1, 07.01.2003. | |||

