Изобретения относятся к радиотехнике и могут использоваться для определения местоположения загоризонтных объектов по излучениям их радиолокационных станций, например, корабельных соединений или боевых кораблей с работающими навигационными РЛС с помощью береговых стационарных или мобильных пассивных радиолокационных станций.
Известен способ местоопределения источников радиоизлучения (см. Долуханов М.П. Распространение радиоволн. - М.: Связь, 1972. - 336 с.), основанный на измерении азимута и расчете дальности до ИРИ по известной мощности передатчика, коэффициенту усиления передающей антенны и множителю ослабления трассы. К недостаткам этого способа относится необходимость наличия априорной информации о передающем устройстве и параметрах среды распространения радиоволн (РРВ), что ограничивает его применение.
Из описания к патенту Российской Федерации №2072524, публ. 1997 г., МПК6 G 01 S 3/02 известен способ местоопределения радиоизлучателей, заключающийся в измерении углов прихода ионосферной волны в горизонтальной и вертикальной плоскостях, измерении высотно-частотной характеристики ионосферы над радиопеленгатором путем ее вертикального зондирования, выполнении траекторного расчета координат точки отражения радиоволны и определении медианных значений параметров ионосферы в ней по прогнозам, расчете углов продольного и поперечного наклона отражающего слоя ионосферы в окрестностях точки отражения радиоволны, коррекции измеренных азимута и угла места, расчете дальности до ИРИ, а также его широты и долготы. Этот способ имеет низкую точность местоопределения источников радиоизлучения, что обусловлено значительной величиной погрешности аппроксимации высотно-частотной характеристики ионосферы, определяющей ошибки определения приращений высоты отражающего слоя вдоль трассы распространения радиоволн и углов его продольного и поперечного наклонов в окрестностях точки отражения радиоволны.
Из патента Российской Федерации №2154281, МПК7 G 01 S 3/02, публ. 2000 г. известен способ местоопределения источников радиоизлучения, заключающийся в измерении азимута и угла места ионосферной радиоволны от источника радиоизлучения, измерении высотно-частотной характеристики (ВЧХ) ионосферы путем ее вертикального зондирования в точке измерения азимута и угла места, определении по прогнозам медианных характеристик ионосферы над районом измерения углов прихода и в точке отражения радиоволны, определении приращения параметров ионосферы вдоль трассы распространения радиоволн, уточнении ВЧХ модели ионосферы в точке отражения радиоволны с учетом данных вертикального зондирования и прогнозов, расчете углов продольного и поперечного наклона отражающего слоя ионосферы в окрестностях точки отражения радиоволны и траекторном расчете координат источника радиоизлучений, при этом после измерения ВЧХ ионосферы путем ее вертикального зондирования в точке измерения азимута и угла места дополнительно ее аппроксимируют полиномом, после чего корректируют ВЧХ ионосферы в точке отражения радиоволны. Этот способ несколько снижает ошибки в определении координат источника радиоизлучения, но и как описанный ранее имеет невысокую точность.
Известны способы и устройства пеленгования источников радиоизлучения (РЭС) средствами радиотехнической разведки (см. В.В.Цветов, В.П.Демин, А.И.Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998 г., стр.27...32). Так, например, известен ряд способов пеленгования, основанных на том, что фазовые соотношения между сигналами, принимаемыми в пространственно разнесенных точках, можно преобразовать в амплитудную зависимость суммы принятых сигналов от местоположения РЭС (см. В.В.Цветов, В.П.Демин, А.И.Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998 г., стр.29).
Известен также способ пеленгования на основе измерения разности времен приема сигналов от источника радиоизлучения, например радиолокационной станции (РЛС) двумя разнесенными антеннами (см. В.В.Цветов, В.П.Демин, А.И.Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998 г., стр.39). При отклонении положения РЛС от перпендикуляра к центру базы возникает разность хода сигналов Δr=r1-r2 (r1 и r2 - расстояния от РЛС до первой и второй антенн соответственно). Относительное запаздывание t сигналов, вследствие постоянства скорости и прямолинейности распространения радиоволн, пропорционально разности хода: t=Δr/с. В общем случае, системы, использующие рассмотренный принцип, являются разностно-дальномерными, однако при больших удалениях РЛС от центра базы, когда расстояние до РЛС существенно превышает размер базы, гиперболические линии положения, свойственные разностно-дальномерному способу, в дальней зоне практически совпадают с их асимптотами, исходящими в виде лучей из центра базы. В этом случае разностно-дальномерные системы допустимо считать угломерными с присущими им погрешностями.
Патентом Российской Федерации №2204145, МПК7 G 01 S 3/46, публ. 2003 г. защищен разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство, которые обеспечивают возможность определения азимута РЛС при любых размерах измерительных баз пеленгатора и вариантах взаимного расположения РЛС и антенн пеленгатора.
Предлагаемый способ предполагает выполнение следующих операций:
- располагают три антенны в вершинах равнобедренного прямоугольного треугольника ΔАВС;
- принимают сигнал РЛС на все три антенны,
- измеряют разности времен приема сигнала РЛС антеннами, образующими ортогональные базы;
- вычисляют значения суммы и разности разностей времен приема сигнала РЛС;
- вычисляют значение отношения суммы разностей времен приема сигнала РЛС к разности разностей времен приема сигнала РЛС;
- вычисляют значение функции arctan(x), в качестве аргумента которой принимается результат предыдущей операции;
- вычисляют значение координат точки, принадлежащей линии положения РЛС;
- отображают подученные результаты.
Недостаток описанного способа - низкая точность при малых скоростях сближения измерительного комплекса и носителя РЛС, а также существенные ошибки при определении местоположения импульсных РЛС и невозможность обнаружения загоризонтных объектов из-за низкой чувствительности беспоисковых пеленгаторов.
Наиболее очевидным и широко применяемым является амплитудный способ пеленгования, при котором используется антенная система, имеющая диаграмму направленности с ярко выраженным максимумом. За счет механического изменения положения (ориентации) антенны осуществляется сканирование пространства, в результате чего определяется положение антенны, при котором выходной сигнал антенны имеет максимальную амплитуду, а направление, совпадающее с максимумом диаграммы направленности антенны, принимается за направление на РЭС (см. В.В.Цветов, В.П.Демин, А.И.Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998 г., стр.27). Этот способ пеленгования можно использовать при многопозиционном определении местоположения РЭС, когда на первом этапе на основании анализа радиотехнических параметров сигналов РЭС определяются их геометрические параметры (пеленг от нескольких, разнесенных в пространстве, пеленгаторов или разности дальностей), а затем, на втором этапе, на основе геометрических параметров вычисляются пространственные координаты. Чаще всего при этом используют триангуляционные методы (см. В.В.Цветов, В.П.Демин, А.И.Куприянов. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998 г., стр.33...37). Триангуляционный способ местоопределения реализуется следующим образом. Два пеленгатора расположены на поверхности земли на расстоянии d друг от друга. С пеленгаторами связаны декартовы топоцентрические системы координат соответственно O1x1y1z1 и O2x2y2z2. Если в качестве основной системы принять систему O1x1y1z1≡≡Oxyz, то координаты РЭС в этой системе можно оценить на основе геометрических построений y=x·tgα1=(d-1)·tg(1/2π-α2), где α1 и α2 - пеленг, измеренный первым и вторым пеленгаторами, откуда:

Как видно из приведенных формул, для определения пространственных координат РЭС достаточно двух независимых измерений, но для повышения точности и исключения неопределенности число измерений увеличивают за счет применения большего числа пеленгаторов.
Триангуляционный способ местоопределения источников радиоизлучения принят в качестве прототипа. Недостаток прототипа - с увеличением дальности до источника радиоизлучения существенно возрастает погрешность измерения координат, а за счет роста площади ошибок координат возрастает вероятность ложных обнаружений при множестве источников радиоизлучений.
Задача, решаемая изобретением, снижение погрешности измерения координат загоризонтных источников радиоизлучений.
Решение указанной задачи достигается тем, что в способе местоопределения источников радиоизлучений, преимущественно объектов по излучениям их радиолокационных станций (РЛС), включающий обнаружение излучений и измерение пеленгов с использованием как минимум двух разнесенных в пространстве пассивных радиолокационных станций (ПРЛС) и вычисление координат источников радиоизлучений триангуляционным методом, отличающийся тем, что определение местоположения осуществляют в три этапа, на первом этапе на каждой ПРЛС производят поиск и обнаружение загоризонтных объектов по излучениям их РЛС, измеряют радиотехнические и временные параметры излучений РЛС, по радиотехническим параметрам излучений и пеленгу идентифицируют обнаруженные РЛС с загоризонтными объектами и переходят в режим непрерывного сопровождения этих объектов, при этом отсеивают информацию от расположенных в пределах радиогоризонта объектов, полученную от каждой ПРЛС, уточняют рабочий сектор углов для наведения и отслеживания выбранного загоризонтного объекта, на втором этапе не менее чем двумя ПРЛС осуществляют непрерывное сопровождение выделенного на первом этапе загоризонтного объекта и фиксируют время приема каждого импульса РЛС этого объекта, на третьем этапе по измеренным ПРЛС пеленгам и временам приема каждого импульса сопровождаемой РЛС определяют период обзора этой РЛС, разность углов облучения главным лучом РЛС каждой ПРЛС и дальность до загоризонтного объекта триангуляционным методом с учетом разности углов облучения. Разность углов облучения определяют в следующей последовательности: измеряют время прохода максимумом диаграммы излучения РЛС направления на первую ПРЛС, время прохода максимумом диаграммы направления на вторую ПРЛС, определяют разность углов облучения по формуле ψ=(2π·Δt)/Тобз, где Тобз - период обзора РЛС, измеренный или выбранный из каталога, Δt - разность времен прохода максимумом диаграммы излучения РЛС направлений на первую и вторую ПРЛС, π=3,14.
Пассивная радиолокационная станция, используемая при реализации заявляемого способа, является самостоятельным изобретением.
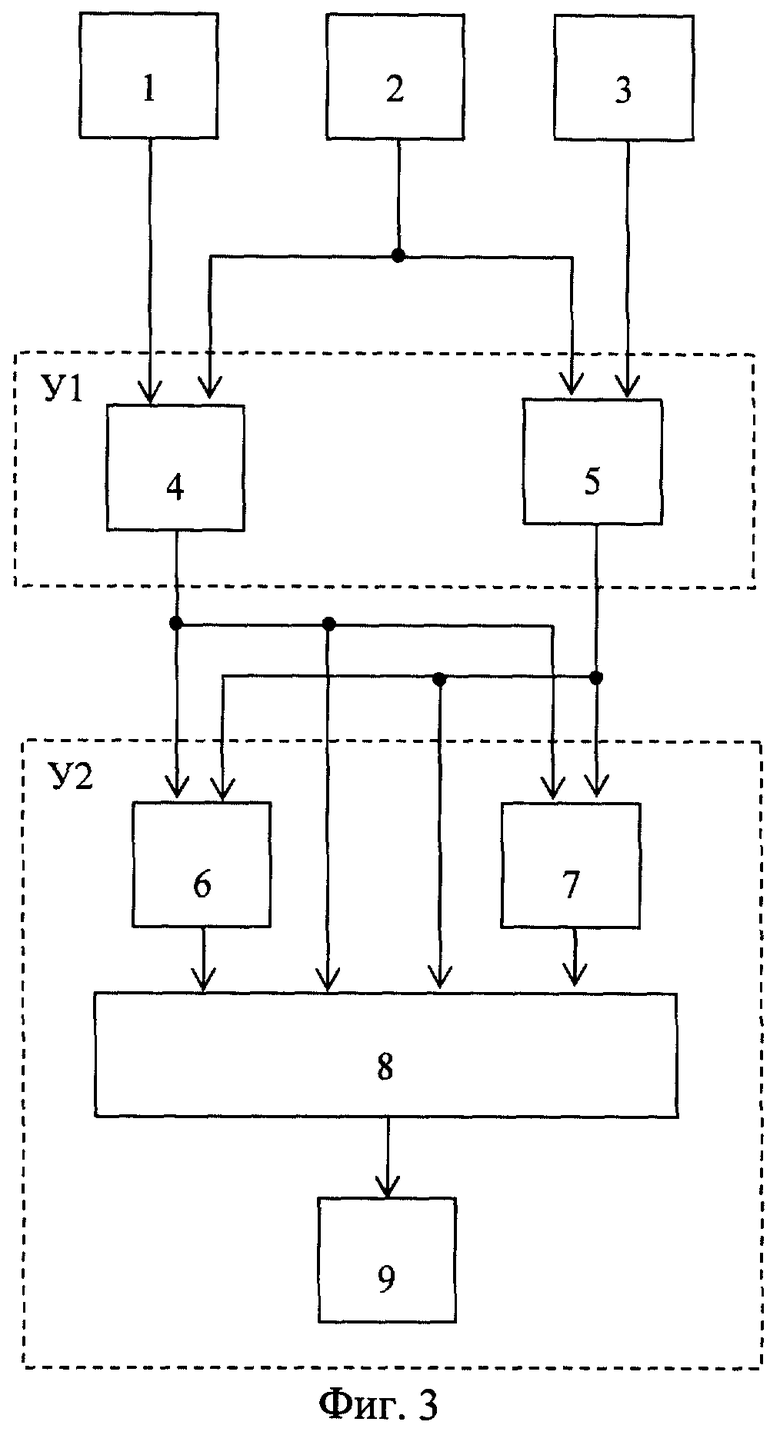
Патентом Российской Федерации №2204145, МПК7 G 01 S 3/46, публ. 2003 г. защищено устройство, реализующее разностно-дальномерный способ пеленгования источника радиоизлучения, которые обеспечивают возможность определения азимута РЛС при любых размерах измерительных баз пеленгатора и вариантах взаимного расположения РЛС и антенн пеленгатора. В состав устройства входят (фиг.3) антенны 1, 2 и 3, устройство измерения У1, содержащее измерители разности времен 4 и 5, и устройство обработки информации и отображения У2, содержащее блок вычитания 6, блок суммирования 7, блок анализа 8 и блок индикации 9. Выходы антенн 1 и 2 соединены с первыми входами измерителей разности времен 4 и 5, на вторые входы которых подается сигнал с выхода антенны 3. Выход измерителя разности времен 4 подключается к первым входам блока вычитания 6 и блока суммирования 7, а выход измерителя разности времен 5 подключается ко вторым входам блока вычитания 6 и блока суммирования 7. На входы блока анализа поступают сигналы с выходов измерителей разности времен 4 и 5, блока вычитания 6 и блока суммирования 7. Выход блока анализа подключен ко входу блока индикации.
Антенны 1, 2 и 3 пространственно разнесены и расположены в вершинах равнобедренного прямоугольного треугольника ΔАВС соответственно.
Сигнал РЛС, принятый антеннами 1, 2 и 3, на их выходах имеет вид
u1(t)=U(t)cos(w0t+ϕ0),
u2(t)=U(t+Δt21)cos[w0(t+Δt21)+ϕ0],
u3(t)=U(t+Δt31)cos[w0(t+Δt31)+ϕ0],
соответственно.
Сигналы с выходов антенн 1 и 3 поступают на первый и второй входы измерителя разности времен 4 соответственно, аналогично сигналы с выходов антенн 2 и 3 поступают на первый и второй входы измерителя разности времен 5 соответственно. Измерители разности времен 4 и 5 осуществляют операцию измерения разностей времен Δt13 и Δt23 прихода сигнала ИРИ на пары антенн (1, 3) и (2, 3). При этом Δtij=ti-tj,
где tk - время прихода сигнала ИРИ на k-ую антенну,
Δtnm - разность времен прихода сигнала ИРИ на n-ую и m-ую антенны.
Измерители разности времен 4 и 5 реализуют один из известных способов измерения разности времен.
С выходов измерителей разностей времен 4 и 5 измеренные значения Δt13 и Δt23 поступают на блоки вычитания 6 и суммирования 7. Блок вычитания осуществляет операцию вычисления значения tΔ разности разностей времен приема сигнала ИРИ; блок суммирования осуществляет операцию вычисления значения ts суммы разностей времен приема сигнала ИРИ:
ts=Δt13+Δt23,
tΔ=Δt13-Δt23.
Вычисленные значения tΔ и ts с выходов блоков 6 и 7 поступают на первый и четвертый входы блока анализа 8, на второй и третий входы которого поступают значения разностей времен Δt13 и Δt23 с выходов измерителей разностей времен 4 и 5.
Блок анализа 8 представляет собой специализированное вычислительное устройство, выполняющее следующие вычислительные операции:
- вычисляется значение отношения w=ts/tΔ;
- вычисляют значение ϕ угла места РЛС с использованием выражения
ϕ=arctan (w),
где в качестве аргумента используется результат предыдущей вычислительной операции;
- вычисляют значения xf, yf координат точки, принадлежащей линии положения РЛС.
Вычисленные значения ϕ, xf, yf с выхода блока анализа поступают в блок индикации, который предназначен для визуализации результатов предлагаемого способа пеленгования.
Устройство, описанное в патенте Российской Федерации №2204145, принято в качестве прототипа.
Недостаток описанного устройства - низкая точность при малых скоростях сближения измерительного комплекса и носителя РЛС, а также существенные ошибки при определении местоположения импульсных РЛС и невозможность обнаружения загоризонтных объектов из-за низкой чувствительности беспоисковых пеленгаторов.
Технический результат от использования заявляемой пассивной радиолокационной станции - повышение точности местоопределения загоризонтных объектов по излучениям их РЛС.
Указанный технический результат достигается тем, что пассивная радиолокационная станция содержит антенны канала компенсации боковых и фоновых лепестков, узконаправленную зеркальную антенну, последовательно соединенные малошумящий усилитель высокой частоты, многоканальное приемное устройство, устройство первичной обработки информации и измерения несущей частоты, длительности, амплитуды и времени приема сигналов обнаруженной радиолокационной станции, устройство статистической обработки информации и измерения пеленга, периода повторения, длительности серии и повторения серий импульсов, второй вход-выход которого соединен с первым входом-выходом устройства взаимного обмена информацией пассивных радиолокационных станций об обнаруженных радиолокационных станциях и временной синхронизации, третий вход-выход соединен с первым входом-выходом устройства вычисления разности углов облучения обнаруженной радиолокационной станции антенн пассивных радиолокационных станций, четвертый вход-выход соединен с первым входом-выходом устройства управления, второй вход-выход устройства управления соединен со вторым входом-выходом устройства вычисления разности углов облучения обнаруженной радиолокационной станцией антенн пассивных радиолокационных станций, третий вход-выход которого соединен со вторым входом-выходом устройства взаимного обмена информацией пассивных радиолокационных станций об обнаруженных радиолокационных станциях и временной синхронизации, третий выход устройства управления соединен с приводом узконаправленной зеркальной антенны, облучатель которой подключен к входу малошумящего усилителя высокой частоты, выход усилителя канала компенсации боковых и фоновых лепестков соединен со вторым входом многоканального приемного устройства, при этом антенны канала компенсации приема по боковым и фоновым лепесткам соединены с усилителем канала компенсации боковых и фоновых лепестков.
Заявленные технические решения соответствуют условиям патентоспособности "новизна", "изобретательский уровень" и "промышленная применимость", так как отсутствуют источники информации с описанием заявленной совокупности признаков, технические решения относятся к радиотехнике и могут быть многократно воспроизведены с достижением заявленного результата.
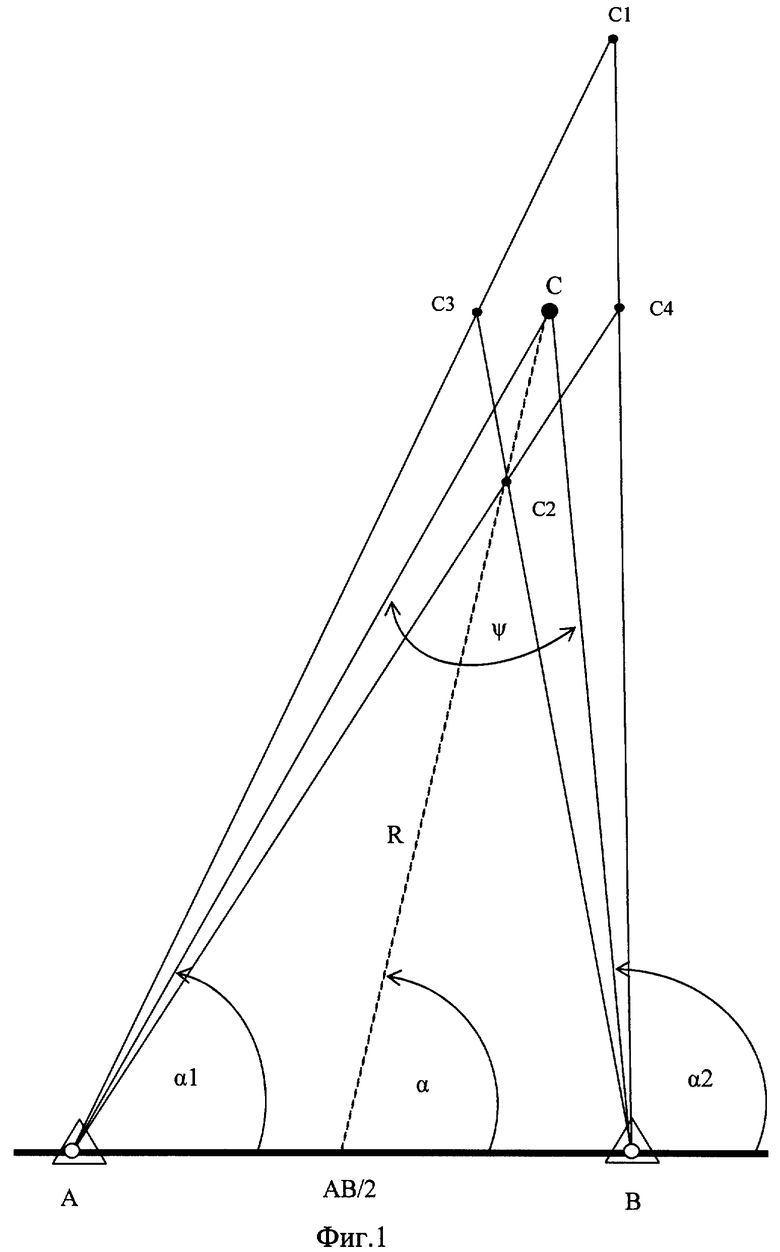
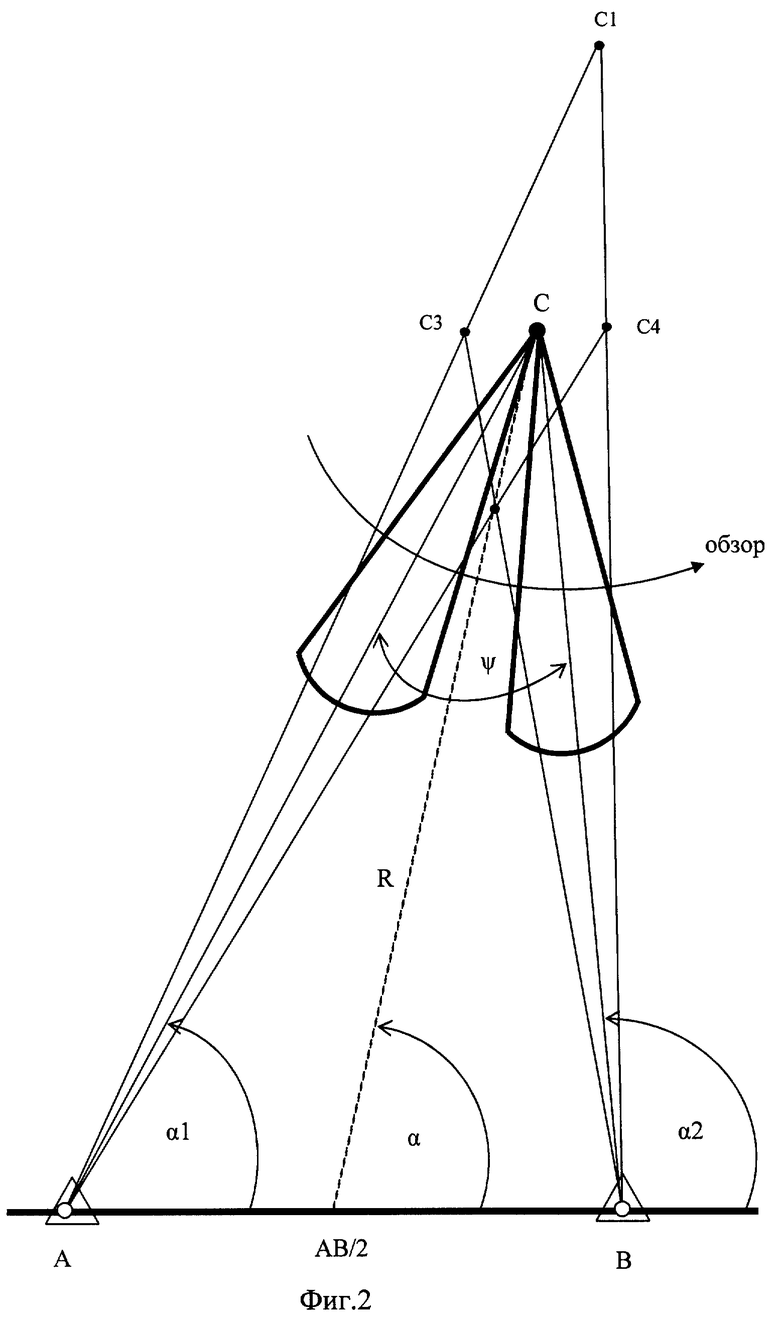
Изобретения поясняются чертежами. На фиг.1 изображена схема местоопределения РЛС по триангуляционному методу, на фиг.2 - схема местоопределения РЛС с использованием заявленного способа, на фиг.3 - блок-схема устройства местоопределения источников радиоизлучения по патенту РФ №2204145, на фиг.4 - пример системы, реализующей заявленный способ, на фиг.5 - блок-схема пассивной станции радиотехнической станции
Позиции на чертежах 1...5 обозначают:
1 - первая антенна устройства по патенту №2204145;
2 - вторая антенна устройства по патенту №2204145;
3 - третья антенна устройства по патенту №2204145;
4 - первый измеритель разности времен устройства по патенту №2204145;
5 - второй измеритель разности времен устройства по патенту №2204145;
6 - блок вычитания устройства по патенту №2204145;
7 - блок суммирования устройства по патенту №2204145;
8 - блок анализа устройства по патенту №2204145;
9 - блок индикации устройства по патенту №2204145;
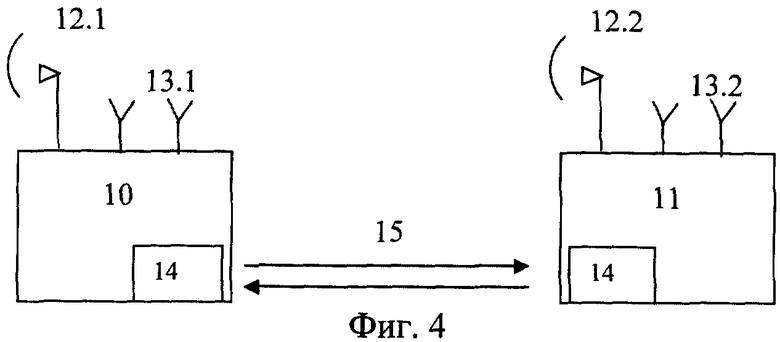
10 - первая пассивная радиолокационная станция ПРЛС 10;
11 - вторая пассивная радиолокационная станция ПРЛС 11;
12.1, 12.2 - узконаправленная зеркальная антенна;
13.1, 13.2 - антенны канала компенсации приема по боковым и фоновым лепесткам;
14 - устройство взаимного обмена информацией и временной синхронизации ВЗОИ 14;
15 - канал связи;
16 - малошумящий усилитель высокой частоты УВЧ 16;
17 - многоканальное приемное устройство МПУ 17;
18 - усилитель канала компенсации боковых и фоновых лепестков УК 18;
19 - устройство первичной обработки информации и измерения несущей частоты, длительности, амплитуды и времени приема сигналов РЛС ПОИ 19;
20 - устройство статистической обработки информации и измерения пеленга, периода повторения импульсов, длительности серии и периода повторения серий ВОИ 20;
21 - устройство управления УУ 21;
22 - устройство вычисления разности углов облучения обнаруженной радиолокационной станцией антенн пассивных радиолокационных станций и координат обнаруженных радиолокационных станций ВУ 22;
23 - привод узкополосной зеркальной антенны;
А - позиция ПРЛС 10;
В - позиция ПРЛС 11;
С - истинная позиция объекта-носителя РЛС;
С1, С2, С3, С4 - поле погрешностей при триангуляционном методе местоопределения;
У1 - устройство измерения;
У2 - устройство обработки информации и отображения;
R, α - пространственные координаты объекта-носителя РЛС;
ψ - разность углов облучения.
Заявленный способ реализуется следующим образом. Не менее чем две пассивные радиолокационные станции (ПРЛС), включающие измерители радиотехнических и временных параметров принимаемых радиоизлучений и связанные друг с другом каналом обмена информацией, расположены на расстоянии d друг от друга. На первом этапе каждая ПРЛС самостоятельно ведет обнаружение загоризонтных РЛС и измерение пеленгов на них и радиотехнических и временных параметров. По измеренным радиотехническим и временным параметрам осуществляется идентификация РЛС с каталогом. Полученная информация от каждой ПРЛС обрабатывается с целью отсева информации от близко расположенных (в пределах радиогоризонта) объектов и уточнения рабочего сектора углов для наведения и отслеживания ПРЛС выбранного загоризонтного объекта. На втором этапе осуществляется согласованное наведение антенн ПРЛС на загоризонтный объект, выделенный на первом этапе, и производится уточнение пространственных и радиотехнических параметров РЛС и отсев ложных результатов триангуляции. На третьем этапе производится измерение разности углов облучения РЛС ПРЛС (путем измерения разности времен облучения обзорной РЛС и периода обзора этой РЛС) и определение координат объекта с учетом этих углов. Разность углов облучения определяется в следующей последовательности: измеряют время прохода максимумом диаграммы излучения РЛС направления на первую ПРЛС, время прохода максимумом диаграммы направления на вторую ПРЛС, определяют разность углов облучения по формуле ψ=(2π·Δt)/Тобз, где Тобз - период обзора РЛС, измеренный или выбранный из каталога, Δt - разность времен прохода максимумом диаграммы излучения РЛС направлений на первую и вторую ПРЛС, π=3,14.
Более подробно заявляемый способ может быть проиллюстрирован описанием работы системы, которая, например, содержит первую и вторую пассивные радиолокационные станции ПРЛС 10 и ПРЛС 11, отстоящие друг от друга на расстоянии прямой видимости (фиг.4). Каждая пассивная радиолокационная станция (фиг.3) содержит узконаправленную зеркальную антенну 12 с приводом 23, облучатель которой вращающимся волноводным соединением подключен к входу малошумящего усилителя высокой частоты УВЧ 16, и антенны 13 канала компенсации приема по боковым и фоновым лепесткам, соединенные с усилителем канала компенсации боковых и фоновых лепестков УК 18. УВЧ 16 и УК 18 выполнены на малошумящих транзисторах. Выходы УВЧ 16 и УК 18 подключены к многоканальному приемному устройству МПУ 17, представляющему собой совокупность многоканальных по частоте широкополосных приемников прямого усиления, с помощью которых сигналы СВЧ усиливаются, расфильтровываются и детектируются. Выходы МПУ 17 соединены с устройством первичной обработки информации и измерения несущей частоты, длительности, амплитуды и времени приема сигналов РЛС ПОИ 19, в котором осуществляется аналого-цифровое преобразование по всем каналам МПУ 17, исключение сигналов, принятых по боковым и фоновым лепесткам и от своих активных РЛС, и измерение моноимпульсных радиотехнических параметров (несущая частота, длительность импульса, относительный уровень) отселектированных сигналов. ПОИ 19 шиной данных соединен с устройством статистической обработки информации и измерения пеленга, периода повторения импульсов, длительности серии и периода повторения серий (устройством вторичной обработки информации) ВОИ 20, в котором формируется информация об обнаруженных излучениях по совокупности нескольких импульсов с измерением периода следования импульсов, длительности серий, периода повторения серий, времени приема каждого импульса и усредненного пеленга, а по совокупности радиотехнических и временных параметров - по каталогу идентификация РЛС и объекта-носителя. ВОИ 20 портами ввода-вывода соединен с устройством взаимного обмена информацией и временной синхронизации ВЗОИ 14, устройством управления УУ 21 и устройством вычисления разности углов облучения обнаруженной радиолокационной станцией антенн пассивных радиолокационных станций и координат обнаруженных радиолокационных станций ВУ 22. ВЗОИ 14 предназначено для обмена информацией об обнаруженных РЛС ПРЛС 10 и ПРЛС 11. Эта информация включает классификационный код РЛС, установленный по каталогу, совокупность радиотехнических и временных параметров радиоизлучения и усредненный пеленг. В УУ 21 констатируется факт обнаружения обеими ПРЛС одной и той же РЛС и принимается решение о синхронном наведении и сопровождении этой РЛС, измерении разности углов облучения и определении координат объекта-носителя РЛС. УУ 21 соединено с приводом 23 узконаправленной зеркальной антенны и ВУ 22, которое в свою очередь соединено с ВЗОИ 14. В ВУ 22 по информации о времени начала и конца приема серий импульсов, принятых обеими ПРЛС за один период обзора, и периоде обзора РЛС вычисляется разность углов облучения и определяются координаты объекта-носителя РЛС.
Каждая из ПРЛС вначале независимо ведёт поиск загоризонтных РЛС в заданном секторе или в режиме кругового обзора. При обнаружении какой-либо ПРЛС излучения РЛС параметры ее сигналов (пеленг, несущая частота, длительность и период повторения импульсов) передаются на вторую ПРЛС. При обнаружении РЛС второй ПРЛС начинается синхронное сопровождение обнаруженной РЛС обеими ПРЛС и измерение ее периода обзора. На обеих ПРЛС фиксируется время прихода первого и последнего импульсов серии за один период обзора. Разность углов облучения ψ (фиг.2) определяется из следующих соотношений. Время прохода максимумом диаграммы излучения РЛС направления на первую ПРЛС определяется из выражения t1=1/2(tк1-tн1), где tк1 - время прихода последнего импульса серии, зафиксированное на первой ПРЛС, tн1 - время прихода первого импульса серии. Время прохода максимумом диаграммы направления на вторую ПРЛС t2=1/2(tк2-tн2), где tн2 - время прихода последнего импульса серии, зафиксированное на второй ПРЛС, tн2 - время прихода первого импульса серии, зафиксированное на второй ПРЛС. Разность Δt=t2-t1 равна времени прохода максимумом диаграммы от направления на первую ПРЛС до направления на вторую ПРЛС, откуда ψ=(2π·Δt)/Тобз, где Тобз - период обзора РЛС, измеренный или выбранный из каталога. Поскольку время обзора Тобз несопоставимо больше длительности импульса и периода повторения импульсов РЛС, погрешность измерения угла ψ достаточно мала, особенно при усреднении по результатам нескольких измерений, и будет существенно ниже погрешности прямого измерения этого угла (фиг.1). При малых углах ψ, что практически имеет место при расположении ПРЛС на дальностях прямой видимости, дальность до излучающей РЛС, равноудаленной от обеих ПРЛС (α=1/2π), определяется однозначно по формуле Д=1/2d/sin1/2ψ≈d/ψ, где d - расстояние между ПРЛС. В общем случае, при α≠1/2π можно считать, что Д=d·cosα/ψ. Из фиг.1 видно, что погрешность измерения дальности до излучающей РЛС при триангуляционном местоопределении существенно растет с увеличением R за счет роста площади ошибок (четырехугольника С1, С2, С3, С4). При местоопределении с использованием заявленного способа погрешность определения дальности не зависит от погрешности пеленгования, что при больших дальностях загоризонтных объектов-носителей РЛС позволяет снизить результирующую ошибку измерения дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2490661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
Изобретения относятся к радиотехнике и могут использоваться для определения местоположения загоризонтных объектов по излучениям их радиолокационных станций, например, корабельных соединений или боевых кораблей с работающими навигационными РЛС с помощью береговых стационарных или мобильных пассивных радиолокационных станций. Достигаемый технический результат - снижение погрешности измерения координат загоризонтных источников радиоизлучений. Решение указанной задачи достигается тем, что в способе местоопределения источников радиоизлучений, преимущественно объектов по излучениям их радиолокационных станций (РЛС), включающем обнаружение излучений и измерение пеленгов (азимутов) с использованием как минимум двух разнесенных в пространстве пассивных радиолокационных станций (ПРЛС) и вычисление координат источников радиоизлучений триангуляционным методом, определение местоположения осуществляют в три этапа, на первом этапе на каждой ПРЛС производят поиск и обнаружение загоризонтных объектов по излучениям их РЛС, измеряют радиотехнические и временные параметры излучений РЛС, по радиотехническим параметрам излучений и пеленгу идентифицируют обнаруженные РЛС с загоризонтными объектами и переходят в режим непрерывного сопровождения этих объектов, при этом отсеивают информацию от расположенных в пределах радиогоризонта объектов, полученную от каждой ПРЛС, уточняют рабочий сектор углов для наведения и отслеживания выбранного загоризонтного объекта, на втором этапе не менее чем двумя ПРЛС осуществляют непрерывное сопровождение одного загоризонтного объекта и фиксируют время приема каждого импульса РЛС этого объекта, на третьем этапе по измеренным ПРЛС пеленгам (азимутам) и временам приема каждого импульса сопровождаемой РЛС определяют период обзора этой РЛС, разность углов облучения главным лучом РЛС каждой ПРЛС и дальность до загоризонтного объекта с учетом разности углов облучения. Способ реализуется с использованием не менее двух пространственно разнесенных пассивных радиолокационных станций (ПРЛС), каждая из которых содержит антенны канала компенсации боковых и фоновых лепестков, узконаправленную зеркальную антенну, последовательно соединенные малошумящий усилитель высокой частоты, многоканальное приемное устройство, устройство первичной обработки информации и измерения несущей частоты, длительности, амплитуды и времени приема сигналов обнаруженной радиолокационной станции, устройство статистической обработки информации и измерения пеленга, периода повторения, длительности серии и повторения серий импульсов и устройство вычисления разности углов облучения обнаруженной радиолокационной станцией антенн пассивных радиолокационных станций. 2 н. и 1 з.п. ф-лы, 5 ил.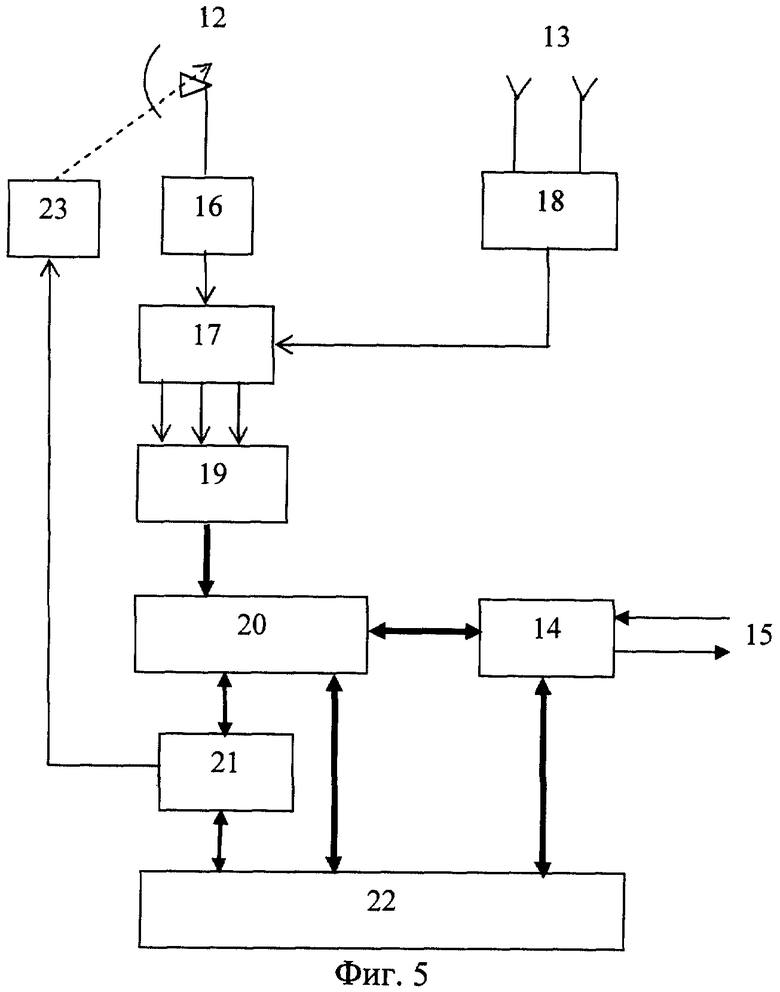
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ШУМОИЗЛУЧЕНИЯ | 1997 |
|
RU2128848C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ И АНТЕННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2168738C1 |
| US 4641143, 03.02.1987 | |||
| US 4263597, 21.04.1981 | |||
| US 4862180, 29.08.1989 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

