Заявляемые объекты объединены единым изобретательским замыслом, относятся к области радиотехники, а именно к радиотехническим комплексам исследования строения земной коры, и могут быть использованы для определения глубины залегания высокопроводящих пластов земной коры.
Известен способ радиолокационного зондирования (Darracot B.M., Lake M.J. An initial appraisal of ground probin radar for site investigations. - Britan Graund Engineering, 1981 / April, p.14-18). Он заключается в излучении в зондируемую среду мощного электромагнитного импульса и измерении времени запаздывания сигнала, отраженного от границ раздела пластов земной коры.
Недостатком данного способа является низкая точность определения глубины залегания пластов земной коры, связанная с присутствием в разрезе неоднородностей (глинистых, обводненных образований), которые оказывают искажающее влияние на распространение электромагнитных волн.
Известен способ геоэлектроразведки (см. патент RU 2179325 С2 G01V 3/08, опубл. 10.02.2002 г.), который заключается в регистрации магнитного поля, возбуждаемого в зондируемой среде, при фиксированном разносе источника излучения и приемника и изменении высоты подъема над землей системы источник-приемник, по распределению напряженности магнитного поля в зависимости от высоты подъема определяют геоэлектрические характеристики изучаемого разреза.
Недостатком данного способа является относительно малая точность измерений на относительно больших глубинах, связанная с тем, что высота и величина разноса между источником электромагнитного поля и приемником имеют конечные размеры.
Наиболее близким по технической сущности к заявляемому способу является способ подповерхностного радиолокационного зондирования, реализованный в «Устройстве подповерхностного радиолокационного зондирования» по пат. RU 2100825 C1 G01S 13/95, опубл. 27.12.1997 г. Способ-прототип заключается в излучении в зондируемую среду сверхширокополосных импульсов с внутриимпульсной модуляцией и поочередном приеме на две пространственно разнесенные приемные антенны сигналов, отраженных от границ раздела слоев земной коры, имеющих различные физико-механические и электрические характеристики. Затем сигнал, принятый одной из приемных антенн, смешивают с опорным сигналом, отфильтровывают сигналы дальномерных частот и усиливают. Отфильтрованный сигнал, отраженный от наблюдаемой цели, оцифровывают и производят расчет глубины залегания зондируемого слоя. Причем в данном способе осуществляют регулировку уровня сигналов дальномерных частот путем изменения величины коэффициента усиления усилителя сигналов дальномерных частот и управления амплитудой импульсной последовательности опорного сигнала для изменения глубины проникновения зондирующих сверхширокополосных импульсов вглубь земной коры. По времени запаздывания отраженных от зондируемой среды импульсов, принятых поочередно на каждую приемную антенну, определяют скорость распространения и глубину залегания зондируемого слоя.
Способ-прототип позволяет повысить точность и величину определения глубины залегания проводящих пластов земной коры, в сравнении с вышеописанными аналогами.
Однако способ-прототип имеет недостатки:
- высокие энергозатраты при реализации способа, т.к. при излучении широкополосного радиоимпульса требуется большая мощность для достижения в точке приема необходимого уровня отношения мощности сигнала и мощности шума;
- относительно низкая точность измерений при экономически целесообразных энергозатратах.
Известен унифицированный генераторно-измерительный комплекс крайне низких и сверхнизких частот для геофизических исследований (см. пат. RU 2188439 С2 G01V 3/12 опубликованный 27.08.2000 г.), в котором применяется радиокомплекс КНЧ-СНЧ диапазона, содержащий «n» генераторов синусоидального тока, подключенных к единому задающему генератору. К каждому из «n» генераторов подключена низко расположенная, горизонтально ориентированная передающая антенна, располагающаяся над почвой с удельной проводимостью σ=2·10-3 Сим/м с заземлителями на концах, расположенных в почве σ≥3·10-3 Сим/м. Измерительный комплекс состоит из двух блоков: модуля аналоговой регистрации и обработки и персональной ЭВМ. Модуль аналоговой регистрации и обработки содержит «n» электрических и магнитных каналов приема, в состав которых входят электрическая и магнитная приемные антенны соответственно, аналоговые модули усиления-фильтрации, режекторные фильтры. В состав персональной ЭВМ входит аналого-цифровой преобразователь, модуль формирования калиброванных сигналов и модуль формирования тактовой частоты.
Однако устройство-аналог имеет ряд недостатков:
- увеличение в n раз потребляемой мощности и массогабаритных показателей устройства, связанное с тем, что используется «n» генераторов синусоидального тока;
- требуется размещение «n» передающих антенн над почвой с различными электрическими параметрами, что не всегда выполнимо.
Известно устройство для осуществления геоэлектроразведки (см. пат. RU 2179325 С2 G01V 3/08, опубл. 10.02.2002 г.), содержащее жесткую неэлектропроводную раму-ферму, на одном конце которой размещен источник электромагнитного поля, а на другом - приемный магнитный датчик, соединенный с регистратором, расположенным в средней части рамы-фермы. Приемный магнитный датчик установлен так, что его ось ориентирована перпендикулярно направлению напряженности поля источника электромагнитного поля. Для изменения положения рамы-фермы над земной поверхностью введены вертикальная штанга, инфракрасный отметчик высоты подъема рамы-фермы, трос один конец которого закреплен в середине рамы-фермы, а другой через систему блоков с поворотным механизмом.
Однако устройство-аналог имеет ряд недостатков:
- относительно малая точность измерений на относительно больших глубинах, связанная с тем, что штанга, на которой располагается рама-ферма, и величина разноса между источником электромагнитного поля и приемником имеют конечные размеры (не боле 2-3 десятков метров);
- относительно большое время, затрачиваемое на развертывание устройства и проведение исследований, связанные с конструкцией устройства, а именно с необходимостью установки штанги и рамы-фермы и изменения их положения относительно исследуемого разреза.
Наиболее близким по своей технической сущности к заявляемому устройству подповерхностного радиолокационного зондирования является «Устройство подповерхностного радиолокационного зондирования» по пат. RU 2100825 C1 G01S 13/95, опубл. 27.12.1997 г.
Устройство-прототип состоит из генератора частотно-модулированного сигнала, модулятора, усилителя мощности, передающей и двух приемных антенн, антенного переключателя, последовательно коммутирующего приемные антенны на узкополосный фильтр, усилитель сигналов, кварцевый фильтр, аналого-цифровой преобразователь, ответвитель, предварительный усилитель, блок задержки, ПЭВМ. Устройство позволяет проводить зондирование на больших глубинах с высокой разрешающей способностью и высокой скоростью обработки информации.
Однако устройство-аналог имеет ряд недостатков:
- большие энергетические затраты, возникающие при исследовании строения земной коры на относительно больших глубинах, связанные с тем, что электромагнитные волны в проводящих средах подвержены сильному затуханию;
- сложность конструкции устройства, связанная с тем, что ряд блоков завязан между собой цепями обратных связей;
- высокие энергетические и экономические затраты, необходимые при исследовании строения земной коры на относительно больших глубинах.
Целью заявляемых технических решений является разработка способа и устройства подповерхностного радиолокационного зондирования, обеспечивающих исследование структуры земной коры с более высокой точностью измерений, реализуемой при экономически целесообразных энергетических затратах.
Заявленные технические решения расширяют арсенал средств данного назначения.
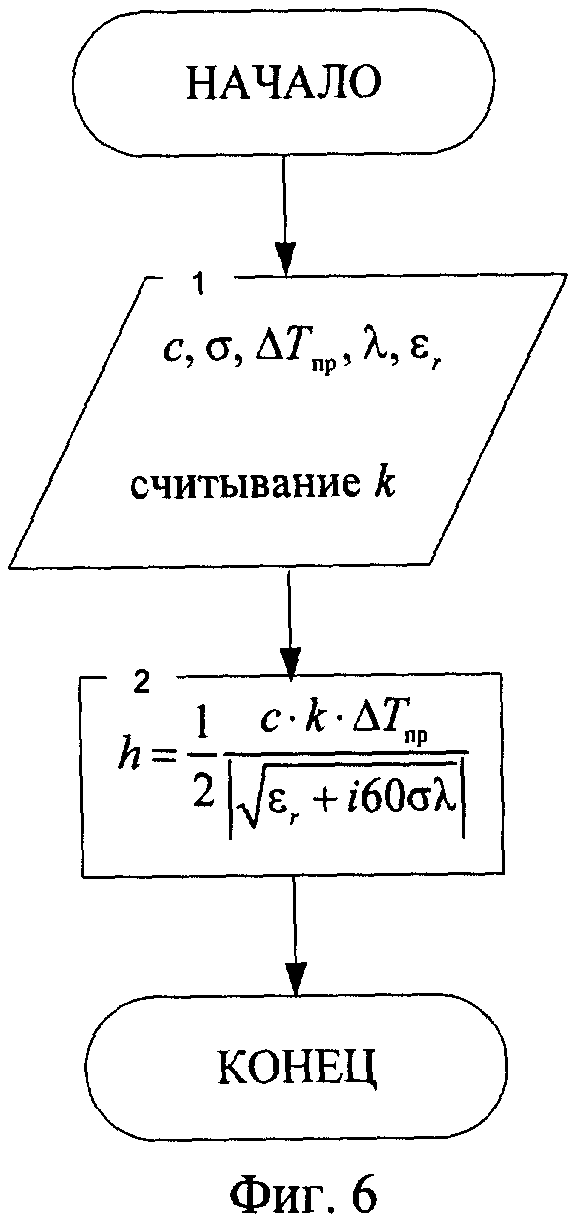
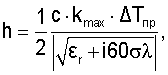
В заявленном способе поставленная цель достигается тем, что в известном способе подповерхностного радиолокационного зондирования, заключающемся в том, что генерируют на частоте f1 первый опорный сигнал, усиливают и излучают его в зондируемую среду, принимают из зондируемой среды отраженный сигнал и смешивают его с вторым опорным сигналом, фильтруют смешанный сигнал, после чего преобразуют его в цифровую форму и вычисляют глубину подповерхностного слоя, согласно изобретению в качестве первого опорного сигнала генерируют сигнал синусоидального вида, в зондируемую среду излучают радиоимпульсы длительностью ΔTпер с периодом ΔT. Интервал приема, который равен периоду излучения радиоимпульсов ΔT, делят на К равных частей. Отраженный сигнал принимают n раз в каждом временном интервале Δtпр(k), где k=1, 2, ..., K с длительностью приема ΔTпр. После чего принятый сигнал усиливают, причем принятый и усиленный сигнал смешивают с вторым опорным сигналом синусоидального вида с частотой f2=f1+Δf, где Δf - частотный разнос излученного и второго опорного сигналов, выделяют разностную составляющую смешанного сигнала. Суммируют отфильтрованные разностные составляющие принятые n раз в временном интервале Δtпр(k). Определяют временной интервал Δtпр(kmax) с максимальной абсолютной величиной суммарного сигнала, а глубину подповерхностного слоя вычисляют по формуле:
где с - скорость света в вакууме, kmax - номер интервала приема с максимальным абсолютным значением сигнала, ΔTпр - длительность интервала приема, εr - относительная диэлектрическая проницаемость зондируемой среды, σ - проводимость зондируемой среды, λ - длина волны зондируемого сигнала.
Благодаря новой совокупности признаков, а именно использованию зондирующих радиоимпульсов с синусоидальным заполнением и разбиению интервала приема на К временных интервалов, в каждом из которых осуществляется прием с накоплением сигналов, в заявленном способе достигается более рациональное использование энергоресурсов и, следовательно, снижение экономических затрат при исследовании структуры земной коры с заданной точностью.
В заявленном устройстве подповерхностного радиолокационного зондирования поставленная цель достигается тем, что в известном устройстве, содержащем усилитель мощности, к антенному выходу которого подключена передающая антенна, а к высокочастотному входу подключен выход первого задающего генератора, блок индикации, блок управления, приемник прямого усиления, к антенному входу которого подключена приемная антенна, смеситель, выход которого подключен к входу узкополосного фильтра низких частот, дополнительно введены второй задающий генератор, накопитель, пороговый анализатор уровня и вычислитель. Выход вычислителя подключен к входу блока индикации. Первый, второй и третий управляющие выходы блока управления подключены к управляющим входам соответственно вычислителя, накопителя и порогового анализатора уровня. Выход порогового анализатора уровня подключен к информационному входу вычислителя, а информационный вход подключен к выходу накопителя. Информационный вход накопителя подключен к выходу узкополосного фильтра низких частот. Выход второго задающего генератора подключен к высокочастотному входу смесителя, информационный вход, которого подключен к выходу приемника прямого усиления. Четвертый и пятый управляющие выходы блока управления подключены к управляющим входам соответственно усилителя мощности и приемника прямого усиления.
Блок управления состоит из первого, второго и третьего генераторов импульсов, первого, второго и третьего счетчиков, управляемой линии задержки. Первый выход третьего счетчика является первым управляющим выходом блока, а второй выход третьего счетчика подключен к первому входу управляемой линии задержки, второй вход которой подключен к первому выходу первого счетчика. Второй выход первого счетчика подключен к входу второго генератора импульсов, выход которого является четвертым управляющим выходом блока. Выход управляемой линии задержки подключен к входу третьего генератора импульсов, первый выход которого является пятым управляющим выходом блока. Второй выход третьего генератора импульсов подключен к входу второго счетчика, первый и второй выходы которого являются соответственно третьим и вторым управляющими выходами блока. Третий выход второго счетчика подключен к входу третьего счетчика, а выход первого генератора импульсов подключен к входу первого счетчика.
Перечисленная новая совокупность существенных признаков благодаря введению новых элементов и связей между ними: смесителя, второго задающего генератора, накопителя, порогового анализатора уровня и изменение алгоритма управления блоками устройства - обеспечивает возможность реализации способа с более высокой точностью измерений и меньшими экономическими и энергетическими затратами при исследовании структуры земной коры.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемых способа и устройства подповерхностного радиолокационного зондирования, отсутствуют и, следовательно, заявляемый объект обладает свойством новизны.
Исследование известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемых способа и устройства, показало, что они не следуют явным образом из уровня техники, из которого не выявлена также известность влияния преобразований, предусматриваемых существенными признаками заявляемого изобретения, на достижение указанного результата, что позволяет считать заявляемый объект соответствующим условию патентоспособности «изобретательский уровень».
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг.1 - схема распределения временных интервалов,
на фиг.2 - структурная схема устройства,
на фиг.3 - структурная схема блока управления,
на фиг.4 - схема приемной и передающей антенн,
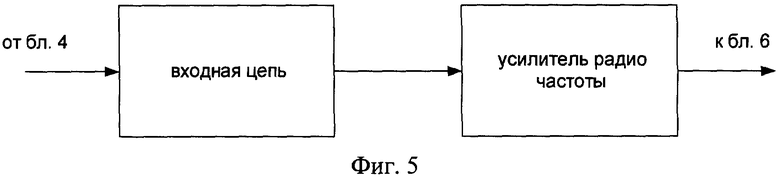
на фиг.5 - структурная схема приемника прямого усиления,
на фиг.6 - алгоритм работы вычислителя.
Реализация заявленного способа объясняется следующим образом.
В различных областях науки и техники возникают задачи исследования строения земной коры. Например, для прогнозирования землятресений необходимо наблюдение за поведением тектонических плит, при разведке полезных ископаемых требуется определение местоположения и глубины залегания руд и других пород и т.д. Наиболее точным методом исследования структуры земной коры является метод бурения, но его использование связано с большими экономическими затратами, которые пропорциональны глубине исследования, с возникающими технологическими трудностями в труднодоступных районах. Кроме того исследования с использованием бурения требует больших временных затрат. Наряду с методом бурения достаточно развит и широко применяется метод радиолокационного зондирования. Преимущества данного метода заключаются в том, что экономические затраты на его осуществление значительно ниже, он обладает высокой скоростью получения и обработки информации, к тому же имеется возможность его реализации подвижными радиолокационными комплексами, что позволяет проводить исследования в труднодоступных районах. Метод радиолокационного зондирования осуществляется различными способами, различающимися друг от друга точностью измерений, энергетическими и экономическими затратами. Устройства радиолокационного зондирования характеризуются точностью измерений, скоростью получения и обработки информации, потребляемой мощностью, мобильностью. Перечисленные выше параметры устройств радиолокационного зондирования влияют на их стоимость и требования к квалификации обслуживающего и эксплуатирующего персонала. Заявляемые объекты изобретения направлены на повышение точности измерений, реализуемой при приемлемых энергетических затратах.
Заявленный способ поясняется следующим образом: генерируют опорный сигнал синусоидального вида на частоте f1, затем его усиливают и излучают в зондируемую среду в виде радиоимпульсов длительностью ΔTпер с периодом ΔT (см. фиг.1). Сигнал, отраженный от границы раздела слоев с различными электрическими характеристиками, принимают, причем интервал приема ΔT делят на К частей, равных ΔTпр=ΔTпер=ΔT/К. Прием осуществляется n раз в каждой k-ой части интервала приема, где k=1, 2, ..., K. Принятые сигналы усиливают и отфильтровывают, затем перемножают с вторым опорным сигналом синусоидального вида с частотой f2=f1+Δf, где Δf - расстройка первого и второго опорных генераторов, далее отфильтровывают разностную составляющую смешанного сигнала. Отфильтрованные разностные составляющие смешанного сигнала, принятые в временном интервале Δtпр(k), суммируют и определяют временной интервал Δtпр(kmax) c максимальным абсолютным значением суммарного сигнала. Производят расчет глубины залегания исследуемого слоя по номеру k-ой части временного интервала приема с максимальным абсолютным значением суммарного сигнала.
Расчет глубины залегания исследуемого слоя производится по следующей схеме: скорость распространения электромагнитных волн (ЭМВ) в среде равна
где с - скорость света в вакууме;
εr - относительная диэлектрическая проницаемость зондируемой среды;
σ - проводимость зондируемой среды;
λ - длина волны зондирующего сигнала в вакууме.
Время распространения ЭМВ в исследуемом срезе равно
tcp=k·ΔTпр,
где k - номер части интервала приема с максимальным значением суммарного сигнала;
ΔTпр - длительность интервала приема,
следовательно, глубина залегания исследуемого слоя равна:
Затухание напряженности ЭМВ в среде с потерями имеет экспоненциальную зависимость е-βh, где
т.е. зависит от частоты несущей зондирующего радиоимпульса. В то же время, для того чтобы в приемной части прекратились переходные процессы, необходимо обеспечить
ΔTпер=(5...10)/f1.
Точность определения глубины залегания Δh исследуемого пласта определяется величиной дискретизации интервала приема Т, т.е. ΔTпр=ΔTпер=(5...10)/f1, следовательно, с увеличение частоты опорного сигнала f1, точность определения глубины залегания исследуемого слоя Δh увеличивается. Период излучения радиоимпульсов зависит от максимальной глубины залегания исследуемых слоев земной коры, для определения которых планируется устройство
Рассогласование первого и второго задающих генераторов определяет энергетику комплекса, т.к. чем меньше полоса пропускания фильтра детектора, тем меньше мощность шумов, проходящих в детектор, т.е. выше отношение сигнал-шум, следовательно, можно уменьшить мощность усилителя мощности, но уменьшение полосы пропускания фильтра приводит к увеличению времени реакции детектора, т.е. времени наблюдения.
Заявленное устройство (см. фиг.2) содержит: первый задающий генератор 1, усилитель мощности 2, передающую антенну 3, приемную антенну 4, приемник прямого усиления 5, смеситель 6, второй задающий генератор 7, узкополосный низкочастотный фильтр 8, накопитель 9, пороговый анализатор уровня 10, блок управления 12, вычислитель 11 и блок индикации 13. Выход первого задающего генератора 1 подключен к информационному входу усилителя мощности 2, выход которого подключен к входу передающей антенны 3. Выход приемной антенны 4 подключен к входу приемника прямого усиления 5, выход которого подключен к первому входу смесителя 6. Выход второго задающего генератора 7 подключен к второму входу смесителя 6. Выход смесителя 6 подключен к входу узкополосного низкочастотного фильтра 8, выход которого подключен к информационному входу накопителя 9. Выход накопителя 9 подключен к информационному входу порогового анализатора уровня 10, выход которого подключен к управляющему входу вычислителя 11. Выход вычислителя 11 подключен к входу блока индикации. Первый, второй, третий, четвертый и пятый выходы блока управления 12 подключены к управляющим входам вычислителя 11, накопителя 9, порогового анализатора уровня 10, усилителя мощности 2 и приемника прямого усиления 5 соответственно.
Первый задающий генератор 1 предназначен для генерации синусоидального сигнала частотой f1, схема блока может быть реализована различным образом, а в частности может быть использован выпускаемый промышленностью опорный генератор «Гиацинт-М», который позволяет генерировать синусоидальный сигнал частотой 5 МГц со стабильностью частоты не более ±3·10-8 и погрешностью по частоте не более ±3·10-7.
Усилитель мощности 2 предназначен для усиления сигнала от первого опорного генератора и передачи усиленного сигнала по командам блока управления 12 в передающую антенну 3, схема блока может быть реализована различным образом, а в частности может быть использован усилитель мощности из комплекта радиопередатчика «Тритон».
Передающая антенна 3 «стелющегося» типа предназначена для преобразования усиленного сигнала первого опорного генератора в электромагнитную волну и излучения ее в зондируемую среду и может быть реализована различным образом, а в частности, как показано на фиг.4, резонансной длины из коаксиального кабеля РК-75-9. Резонансная частота антенны может быть уточнена с помощью измерительного моста ВМ-538. В качестве противовеса антенны может быть использовано 2-е плечо из коаксиального кабеля либо контур заземления.
Приемная антенна 4 предназначена для преобразования электромагнитной волны, отраженной от исследуемого слоя, в электрический сигнал и идентична по конструкции передающей антенне.
Приемник прямого усиления 5 предназначен для предварительной фильтрации принятого приемной антенной сигнала от помех различной природы и его усилении, схема блока известна и может быть реализована, в частности, как показано на фиг.5, реализация входной цепи и усилителя радиочастот может быть различна, а в частности, как описано в кн. В.Т.Поляков. Радиолюбителям о технике прямого преобразования. - М.: Патриот, 1990 г. - 264 с., на стр.107-115.
Смеситель 6 предназначен для перемножения сигналов с выхода второго задающего генератора 7 и приемника прямого усиления 5, схема блока известна и описана в кн. В.Т.Поляков. Радиолюбителям о технике прямого преобразования. - М.: Патриот, 1990 г. - 264 с., стр.117 рис.55 «Кольцевой балансный смеситель».
Второй задающий генератор 7 предназначен для генерации синусоидального сигнала частотой f2=f1+Δf, может быть реализован аналогично первому задающему генератору.
Узкополосный низкочастотный фильтр 8 предназначен для выделения разностной составляющей смешанного сигнала, получаемого с выхода смесителя 6, схема блока может быть реализована различным образом, в частности, как описано в кн. В.Т.Поляков. Радиолюбителям о технике прямого преобразования. - М.: Патриот, 1990 г. - 264 с., стр.108-110 рис. 47(б).
Накопитель 9 предназначен для суммирования сигналов, поступающих с выхода узкополосного низкочастотного фильтра 8 за n тактов, схема блока может быть реализована различным образом, в частности может быть использована RC-цепь с временем релаксации не более 1 мкс.
Пороговый анализатор уровня 10 предназначен для сравнения суммарного сигнала, поступающего с выхода накопителя 9, схема блока может быть реализована различным образом, а в частности на базе интегрального компаратора напряжений (см. кн. Т.М.Агаханян. Интегральные микросхемы. - М.: Энергоатомиздат, 1983 г., с.412-427) с регулируемой величиной порогового значения, величина порогового значения определяется экспериментальным путем. Блок может быть реализован на базе прецизионного компаратора напряжений 521СА3.
Вычислитель 11 предназначен для расчета глубины залегания исследуемого слоя, может быть выполнен в виде автомата на базе микропроцессора (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп. - М.: Радио и связь, 1990, - 512 с.), работающего в соответствии с алгоритмом, приведенным на фиг.6.
Блок индикации 13 предназначен для преобразования кода значения величины глубины залегания исследуемого слоя, получаемого с выхода вычислителя 11, в десятичную цифровую форму, может быть реализован на базе стандартных цифровых индикаторов ИЭЦ.
Блок управления (см. фиг.3) содержит: первый генератор импульсов 12.1, второй генератор импульсов 12.3, третий генератор импульсов 12.5, первый счетчик 12.2, второй счетчик 12.6, третий счетчик 12.7 и управляемую линию задержки 12.4. Выход первого генератора импульсов 12.1 подключен к входу первого счетчика 12.2, второй выход которого подключен к входу второго генератора импульсов 12.3, а первый выход подключен к второму входу управляемой линии задержки 12.4. Выход второго генератора импульсов 12.3 подключен к управляющему входу усилителя мощности 2. Выход управляемой линии задержки 12.3 подключен к входу третьего генератора импульсов 12.5, первый выход которого подключен к приемнику прямого усиления 5, а второй выход подключен к входу второго счетчика 12.6. Третий выход второго счетчика 12.6 подключен к входу третьего счетчика 12.7, а второй и первый к входу накопителя 9 и порогового анализатора уровня 10 соответственно. Первый выход третьего счетчика 12.7 подключен к входу вычислителя 11, а второй - к первому входу управляемой линии задержки 12.4.
Блок управления 12 предназначен для управления усилителем мощности 2, приемником прямого усиления 5, накопителем 9, пороговым анализатором уровня 10 и передачи на вход вычислителя 11 кода временного интервала, по которому производится вычисление глубины залегания исследуемого слоя. Блок содержит: первый генератор импульсов 12.1, первый счетчик 12.2, второй генератор импульсов 12.3, управляемую линию задержки 12.4, третий генератор импульсов 12.5, второй счетчик 12.6, третий счетчик 12.7.
Первый генератор импульсов 12.1 предназначен для генерации непрерывной последовательности импульсов с частотой 1/ΔTпер, схема блока известна и описана (см. кн. Т.М.Агаханян, Интегральные микросхемы. - М.: Энергоатомиздат, 1983 г., с.431-434), в частности может быть реализован на базе стандартных таймеров серии КР1006ВИ1.
Первый счетчик 12.2 емкостью К предназначен для формирования периода излучения зондирующих радиоимпульсов, может быть реализован с помощью последовательного подключения необходимого количества логических элементов (см. Справочник по интегральным микросхемам / Б.В.Тарабрин, С.В.Якубовский, Н.А.Барканов и др.; под ред. Б.В.Тарабрина. - 2-е издание, переработанное и дополненное. - М.: Энергия, 1980. - 816 с.).
Второй счетчик 12.6 емкостью n предназначен для слежения за количеством тактов накопления отраженных сигналов и генерации команд на обнуление накопителя 9 и разрешение работы порогового анализатора уровня 10, может быть реализован аналогично первому счетчику 12.2.
Третий счетчик емкостью К предназначен для формирования кода номера временного интервала, при помощи которого управляется управляемая линия задержки 12.4, а вычислитель 11 производит расчет, может быть реализован аналогично первому счетчику 12.2.
Второй генератор импульсов 12.3 предназначен для генерации импульса длительностью ΔTпер, который служит командой на открытие усилителя мощности 2, представляет собой ждущий мультивибратор и может быть реализован на микросхеме К119ГГ1.
Третий генератор импульсов 12.5 предназначен для генерации импульса длительностью ΔTпр, который служит командой на открытие усилителя мощности 2, представляет собой ждущий мультивибратор и может быть реализован аналогично второму генератору импульсов 12.3.
Управляемая линия задержки 12.4 предназначена для задержки импульса, поступающего с выхода первого счетчика 12.2, на время, равное kΔTпр, значение k определяется кодом, получаемым с выхода третьего счетчика 12.7, схема блока может быть реализована различным образом, а в частности на базе интегрального таймера SE556, см. кн. Т.М.Агаханян, Интегральные микросхемы. - М.: Энергоатомиздат, 1983 г., с.431-434.
Заявленное устройство функционирует следующим образом: первый задающий генератор генерирует синусоидальный сигнал на частоте f1, поступающий на вход усилителя мощности 2, где он усиливается и по команде блока 12 управления излучается передающей антенной 3, подключенной к выходу усилителя мощности 2, в зондируемую среду в виде радиоимпульсов длительностью ΔTпер с периодом ΔT. Зондирующий сигнал, отраженный от исследуемого слоя земной коры, принимается приемной антенной 4, затем поступает на вход приемника прямого усиления 5, в котором по команде блока управления 12 осуществляется прием сигнала в определенной части интервала приема Δtпр(k), усиление и фильтрация зондирующего сигнала. Усиленный и отфильтрованный сигнал с выхода приемника прямого усиления 5 поступает на первый вход смесителя 6, на второй вход которого поступает опорный синусоидальный сигнал частотой f2=f1+Δf от второго задающего генератора 7. В смесителе происходит перемножение принятого зондирующего сигнала и опорного сигнала от второго задающего генератора 7. Выход смесителя 6 подключен к входу узкополосного низкочастотного фильтра 8, настроенного на частоту Δf с полосой пропускания 1 Гц. Отфильтрованная разностная составляющая с выхода узкополосного фильтра нижних частот 8 поступает на информационный вход накопителя 9, который накапливает (суммирует) сигнал за n тактов работы устройства в интервале приема Δtпр(k). По команде блока управления 12, которая поступает на управляющий вход накопителя 9, суммарный сигнал поступает с выхода накопителя 9 на вход порогового анализатора уровня 10, а накопитель 9 обнуляется. Поступивший на вход порогового анализатора 10 уровня суммарный сигнал сравнивается с пороговым значением и в том случае, если уровень суммарного сигнала больше либо равен пороговому значению, на его выходе генерируется команда, поступающая на управляющий вход вычислителя 11, разрешающая вычисление, в противном случае - запрещающая. В случае, когда на первый управляющий вход вычислителя 11 поступила разрешающая команда, вычислитель производит расчет глубины залегания исследуемого слоя по коду номера k-той части интервала приема, который поступает с выхода блока управления 12 на информационный вход вычислителя 11, в противном случае он бездействует. Расчетное значение глубины залегания исследуемого слоя с выхода вычислителя подается на вход блока индикации 13, который отображает полученное значение.
Блок управления 12 функционирует следующим образом: первый генератор импульсов 12.1 непрерывно генерирует последовательность тактовых импульсов частотой 1/ΔTпер. Последовательность тактовых импульсов с выхода первого генератора импульсов 12.1 поступает на вход первого счетчика 12.2 емкостью К=ΔT/ΔТпер, после того как счет достигает К, с первого выхода первого счетчика 12.2 подается импульс на второй вход управляемой линии задержки 12.4, а с второго выхода - на вход второго генератора импульсов 12.3, который после этого генерирует одиночный импульс длительностью ΔTпер, поступающий с его выхода на управляющий вход усилителя мощности 2, и служит командой на его открытие на время длительности импульса ΔТпер. Импульс, поступивший на второй вход управляемой линии задержки 12.4, задерживается на время Tз=k·ΔTпр и поступает на ее выход, который соединен с входом третьего генератора импульсов 12.5. В третьем генераторе импульсов 12.5 генерируется одиночный импульс длительностью ΔTпр и с его первого выхода подается на управляющий вход приемника прямого усиления 5, данный импульс является командой на открытие приемника прямого усиления на время ΔТпр. В то же время с второго выхода третьего генератора импульсов 12.5 поступает импульс на вход второго счетчика 12.6 емкостью n, где n - количество раз приема сигналов в k-ой части временного интервала Δtпр(k). После того как второй счетчик 12.6 просчитал n раз, он обнуляется, и с его первого выхода подается команда на второй вход порогового анализатора уровня 10, разрешающая работу, а с второго выхода подается команда на второй вход накопителя 9 на передачу и обнуление имеющегося значения суммарного сигнала, а с третьего выхода - на вход третьего счетчика 12.7, по которой имеющееся в нем значение увеличивается на «единицу». Третий счетчик 12.7 осуществляет счет до K=ΔT/ΔTпр и определяет порядковый номер временного интервала Δtпр(k). Значение порядкового номера k-ого интервала приема, имеющееся в третьем счетчике 12.7 в данный момент времени, в виде кода поступает с его второго выхода на первый вход управляемой линии задержки 12.4, в которой устанавливается величина задержки, равная k·ΔTпр, а с первого выхода третьего счетчика 12.7 текущее значение номера части временного интервала приема поступает на первый вход вычислителя 11, в котором производится расчет глубины залегания исследуемого слоя.
Для определения глубины залегания высокопроводящих слоев земной коры на глубину до пятисот метров необходимо обеспечить следующие параметры устройства:
- первый задающий генератор сигнала синусоидального напряжения с частотой f1=5 МГц;
- второй задающий генератор сигнала синусоидального напряжения с частотой f2=5 МГц+1 Гц;
- ΔTпр=ΔTпер=1 мкс
При этом: глубина залегания определяется h=50·i [м], точность определения глубины залегания Δh=50 м, затухание по напряженности электрического поля β=386 раз. При данной конфигурации устройства достаточным является использование усилителя мощности с выходной мощностью 100 Вт, что примерно в 100 раз меньше, чем при использовании устройства-прототипа с аналогичными параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1996 |
|
RU2100825C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2138064C1 |
| СПОСОБ И СИСТЕМА РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНЫХ НЕДР | 2009 |
|
RU2436130C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2013 |
|
RU2530288C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| СИСТЕМА ОПЕРАТИВНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 1998 |
|
RU2125277C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2013 |
|
RU2547160C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
Изобретение относится к радиотехническим комплексам исследования строения земной коры и может быть использованы для определения глубины залегания высокопроводящих пластов земной коры. Достигаемым техническим результатом является обеспечение исследования структуры земной коры с более высокой точностью измерений при экономичных энергетических затратах. Изобретение заключается в использовании зондирующих радиоимпульсов с синусоидальным заполнением и разбиении интервала приема на К временных интервалов, в каждом из которых осуществляется прием с накоплением сигналов, благодаря чему в заявленном способе достигается более рациональное использование энергоресурсов. Устройство состоит из первого и второго задающих генераторов, усилителя мощности, передающей и приемной антенн, приемника прямого усиления, смесителя, узкополосного низкочастотного фильтра, накопителя, порогового анализатора уровня, блока управления, вычислителя и блока индикации, соединенных определенным образом. 2 н. и 1 з.п. ф-лы, 6 ил.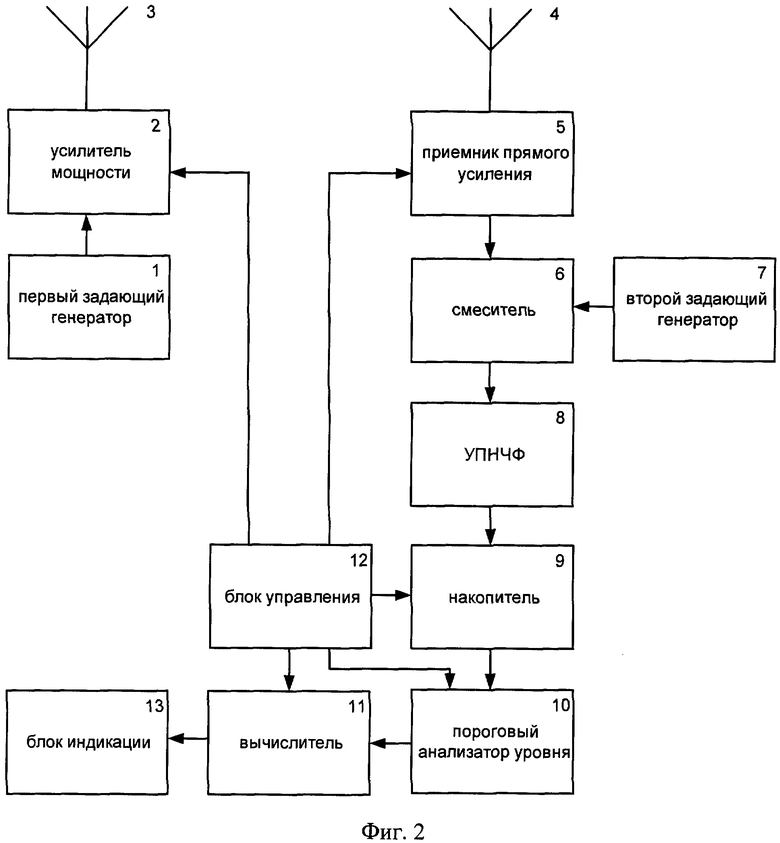
где с - скорость света в вакууме, kmax - номер интервала приема с максимальным абсолютным значением сигнала, ΔТпр - длительность интервала приема, εr - относительная диэлектрическая проницаемость зондируемой среды, σ - проводимость зондируемой среды, λ - длина волны зондируемого сигнала.
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1996 |
|
RU2100825C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДПОВЕРХНОСТНЫХ СТРУКТУР И ЛОКАЛЬНЫХ ОБЪЕКТОВ В НИХ | 2002 |
|
RU2244944C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА | 1999 |
|
RU2144682C1 |
| US 2004168358 A1, 02.09.2004 | |||
| КОМПОЗИЦИЯ И СПОСОБ | 2003 |
|
RU2351154C2 |
| ЕР 1058132 А1, 06.12.2000. | |||

