Изобретение относится к радиотехнике, преимущественно к радиолокации объектов, и может быть использовано для определения длины линейного контрастного по электромагнитным характеристикам относительно вмещающего пространства подповерхностного объекта.
Известен «Радар подповерхностного зондирования», содержащий антенну, соединенную с антенным переключателем, который соединен с выходом передатчика и входом высокочастотного блока приемника, соединенными через усилитель промежуточной частоты с преобразователем координат, на выходе которого включен дисплей; блок селекции дальности с n-входами, каждый из n-входов которого соединен с выходом усилителя промежуточной частоты и с одним из входов n-перемножителей, другой вход каждого из которых соединен с выходом генератора строб-импульсов, при этом каждый из n-выходов блока селекции дальности через вход блока доплеровской фильтрации соединен с одним из m доплеровских фильтров, выход каждого из которых соединен со своим детектором-интегратором, выходы которых соединены с преобразователем координат (Свидетельство на полезную модель РФ №22826, опубл. 27.04.2002).
Недостатком известного радара является отображение на дисплее лишь координат подповерхностной цели и невозможность его использования для определения длины линейного контрастного подповерхностного объекта, поскольку обработка принимаемого сигнала данным радаром не позволяет извлечь информацию о длине предмета.
Известно устройство подповерхностного радиолокационного зондирования, содержащее первый и второй задающий генераторы, усилитель мощности, передающую и приемную антенны, приемник прямого усиления, смеситель, узкополосный низкочастотный фильтр, накопитель, пороговый анализатор уровня, блок управления, вычислитель и блок индикации, соединенные определенным образом (Патент РФ №2303279, опубл. 20.07.2007).
Недостатком устройства является невозможность его использования для определения длины линейного контрастного подповерхностного объекта при зондировании исследуемого пространства в силу того, что данное устройство основано на зондировании пространства радиоимпульсами и разбиении интервала приема на К временных интервалов, в каждом из которых осуществляется прием с накоплением сигналов, в результате чего возможно лишь определение глубины залегания высокопроводящих пластов земной коры.
Наиболее близким к предлагаемому техническому решению является устройство подповерхностного зондирования, используемое для решения задачи определения координат точечной цели при подповерхностном зондировании. Устройство содержит антенную систему с приемо-передающей и приемной антеннами, антенный коммутатор, передатчик, первый и второй малошумящие усилители, первый и второй детекторы, индикаторный блок, синхронизатор, делитель частоты на два (далее делитель на два), первый, второй и третий квадраторы, первый и второй перемножители, первый, второй, третий, четвертый и пятый сумматоры, блок извлечения квадратного корня, блок ввода данных, делитель, первый и второй цифровые измерители длительности интервалов времени (Патент РФ №2433423, опубл. 10.11.2011).
Недостатком известного устройства является невозможность его использования для определения длины линейного контрастного подповерхностного объекта при зондировании исследуемого пространства, поскольку обработка принимаемого сигнала, использованная в прототипе, не позволяет извлечь информацию о длине предмета.
В основу изобретения положена задача определения длины линейного контрастного по электромагнитным характеристикам относительно вмещающего пространства подповерхностного объекта.
Поставленная задача решается тем, что устройство подповерхностного зондирования, включающее приемо-передающую антенну, антенный коммутатор, передатчик, малошумящий усилитель, детектор, индикаторный блок, синхронизатор, первый и второй квадраторы, первый блок извлечения квадратного корня, первый и второй перемножители, сумматор, делитель на два, цифровой измеритель длительности интервала времени и блок ввода данных, согласно изобретению дополнительно содержит два триггера Шмитта, пять схем совпадений, четыре инвертора, три D-триггера, второй блок извлечения квадратного корня, JK-триггер, схему логического сложения, делитель на четыре и счетчик, причем к выходу синхронизатора подключены последовательно соединенные передатчик, антенный коммутатор с подключенной к нему приемо-передающей антенной, малошумящий усилитель, детектор, первый квадратор, первый блок извлечения квадратного корня, первый триггер Шмитта, первый и второй D-триггеры, первый инвертор, первая схема совпадений, схема логического сложения, второй инвертор, третий D-триггер, вторая и третья схемы совпадений, JK-триггер, четвертая схема совпадений, счетчик, первый перемножитель, второй квадратор, делитель на четыре, сумматор, второй блок извлечения квадратного корня и индикаторный блок, между выходом передатчика и вторым входом сумматора последовательно включены второй триггер Шмитта, цифровой измеритель длительности интервала времени, делитель на два и второй перемножитель, второй вход которого соединен с выходом первого премножителя, а его третий вход соединен с блоком ввода данных и вторым входом первого перемножителя, второй вход JK-триггера соединен с выходом пятой схемы совпадений, первый вход которой соединен с выходом второй схемы совпадений, а ее второй вход подключен к выходу JK-триггера и входу третьего инвертора, который выходом соединен со вторым входом третьей схемы совпадений, между выходом и вторым входом третьего D-триггера включен четвертый инвертор, выход синхронизатора также соединен с третьим входом JK-триггера и со вторыми входами первого и второго D-триггеров, четвертой схемы совпадений и цифрового измерителя длительности интервала времени, чей третий вход соединен с выходом первого триггера Шмитта, второй вход первой схемы совпадений соединен с выходом первого D-триггера, второй вход второй схемы совпадений соединен с выходом первой схемы совпадений, а второй вход схемы логического сложения соединен с выходом второго триггера Шмитта.
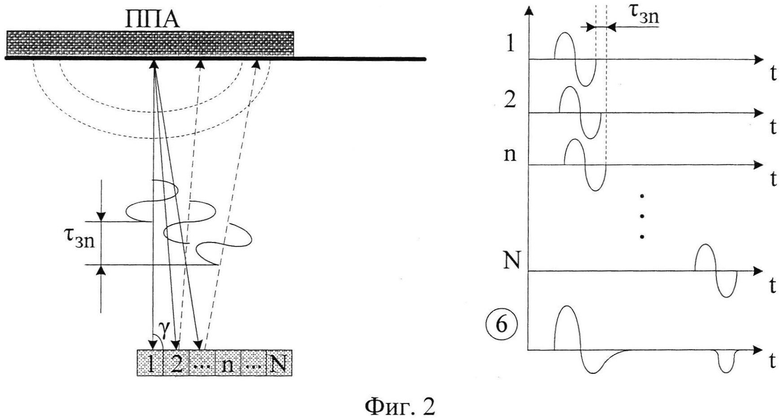
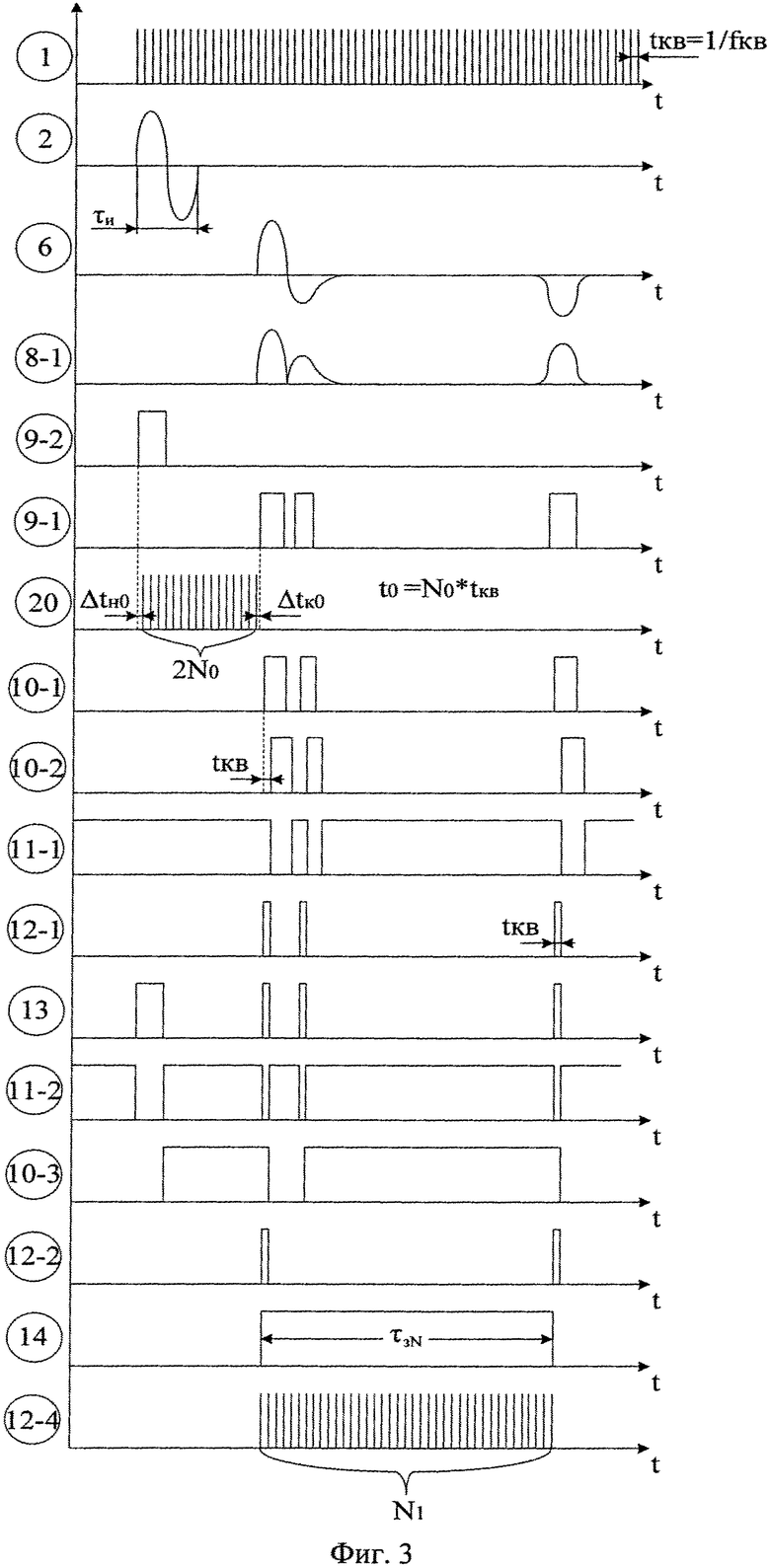
На фиг.1 приведена структурная схема устройства подповерхностного зондирования, на фиг.2 приведены геометрия подповерхностного зондирования и процесс формирования отраженного от линейного объекта сигнала, где ППА - приемо-передающая антенна, а на фиг.3 приведены временные диаграммы, поясняющие принцип работы предлагаемого устройства (цифры в кружках указывают на блок, выходу которого соответствует временная диаграмма).
Устройство подповерхностного зондирования содержит синхронизатор 1, последовательно соединенный с передатчиком 2, антенным коммутатором 3 и приемо-передающей антенной 4. Ко второму выводу антенного коммутатора 3 подключены последовательно соединенные малошумящий усилитель 5, детектор 6, первый квадратор 7-1, первый блок 8-1 извлечения квадратного корня, первый триггер 9-1 Шмитта, первый и второй D-триггеры 10-1 и 10-2, первый инвертор 11-1, первая схема 12-1 совпадений, схема 13 логического сложения, второй инвертор 11-2, третий D-триггер 10-3, вторая и третья схемы 12-2 и 12-3 совпадений, JK-триггер 14, четвертая схема 12-4 совпадений, счетчик 15, первый перемножитель 16-1, второй квадратор 7-2, делитель 17 на четыре, сумматор 18, второй блок 8-2 извлечения квадратного корня и индикаторный блок 19. К выходу передатчика 2 также подключены соединенные последовательно второй триггер 9-2 Шмитта, цифровой измеритель 20 длительности интервала времени, делитель 21 на два и второй перемножитель 16-2, который своим выходом подключен ко второму входу сумматора 18, вторым входом соединен с выходом первого премножителя 16-1, а его третий вход соединен с блоком 22 ввода данных и со вторым входом первого перемножителя 16-1. JK-триггер 14 своим вторым входом соединен с выходом пятой схемы 12-5 совпадений, которая первым входом соединена с выходом второй схемы 12-2 совпадений, а вторым своим входом - с выходом JK -триггера 14 и входом третьего инвертора 11-3, чей выход соединен со вторым входом третьей схемы 12-3 совпадений. Между выходом и вторым входом третьего D-триггера 10-3 включен четвертый инвертор 11-4. Синхронизатор 1 своим выходом также соединен с третьим входом JK-триггера 14 и со вторыми входами первого и второго D-триггеров 10-1 и 10-2, четвертой схемы 12-4 совпадений и цифрового измерителя 20 длительности интервала времени, который своим третьим входом соединен с выходом первого триггера 9-1 Шмитта. Первая схема 12-1 совпадений вторым входом соединена с выходом первого D-триггера 10-1, вторая схема 12-2 совпадений своим вторым входом соединена с выходом первой схемы 12-1 совпадений, а схема 13 логического сложения вторым входом соединена с выходом второго триггера 9-2 Шмитта.
Работает устройство подповерхностного зондирования следующим образом. Синхронизатором 1 формируется бесконечная последовательность коротких электрических импульсов, следующих с частотой квантования fкв. Этими импульсами запускается передатчик 2, в котором частота fкв понижается до частоты следования зондирующих радиоимпульсов, которые представляют собой один период синусоидального колебания длительностью τи (фиг.3, эпюра 2). Зондирующие сигналы через антенный коммутатор 3 возбуждают приемо-передающую антенну 4 и одновременно подаются на второй триггер 9-2 Шмитта, формирующий из них прямоугольные импульсы, которые по первому входу запускают цифровой измеритель 20 длительности интервала времени.
Зондирующий сигнал излучается приемо-передающей антенной 4 в исследуемое подповерхностное пространство и после отражения от линейного контрастного подповерхностного объекта, осуществляется прием отраженного сигнала этой же приемо-передающей антенной 4. Приемо-передающая антенна 4 располагается на поверхности исследуемого пространства. Пусть оптическая ось приемо-передающей антенны 4 перпендикулярна крайнему положению объекта, тогда глубина залегания объекта определяется произведением скорости V распространения зондирующего сигнала в подповерхностном пространстве на время t0 прохождения зондирующим сигналом расстояния от приемо-передающей антенны 4 до объекта.
Антенный коммутатор 3 обеспечивает переключение зондирующих (излучаемых) и принимаемых сигналов в режиме прием-передача с целью развязки достаточно мощного зондирующего сигнала с выхода передатчика 2 от входа малошумящего усилителя 5. Принятый приемо-передающей антенной 4 отраженный от объекта сигнал через антенный коммутатор 3 поступает на вход малошумящего усилителя 5, где он усиливается и поступает на детектор 6, где происходит выделение огибающей этого сигнала. Огибающая с выхода детектора 6 имеет вид двух импульсов, разнесенных по времени, первый из которых имеет положительную и отрицательную полярность, второй - только отрицательную.
Изменение формы отраженного импульса относительно излучаемого зондирующего импульса объясняется следующим. При исследовании взаимодействия падающей волны и проводящего тела широко распространена модель тела в виде набора точечных отражателей (Е.А.Штагер. Рассеяние радиоволн на телах сложной формы. - М.: Радио и связь, 1986). Отраженный сигнал формируется как сумма отражений от каждого точечного отражателя с учетом задержки по времени за счет движения падающей волны вдоль предмета. Моделирование этого процесса показывает, что в составе сигнала, отраженного от линейного предмета, присутствуют (фиг.2):
- искаженный радиоимпульс, формируемый в начальной области взаимодействия зондирующего импульса и отражающего предмета;
- колоколообразный импульс отрицательной полярности, формируемый при сходе зондирующего импульса с отражающего предмета;
- область нулевой постоянной составляющей, разделяющей искаженный радио- и отрицательный колоколообразный импульсы.
Формирование искаженного радиоимпульса в начале и отрицательного колоколообразного импульса в конце отраженного сигнала объясняется тем, что на интервале времени регистрации отраженного сигнала происходит суммирование сигнала (повторяющего форму зондирующего), отраженного от первого точечного элемента, с сигналами, отраженными от соседних точечных элементов, каждый из которых задержан на время:
где Δd - расстояние между центрами соседних точечных элементов объекта,
Z - глубина залегания объекта,
т=1, 2,…N=L/Δd - текущий номер точечного элемента, L - искомая длина объекта.
В основе измерения длины L объекта лежит измерение интервала времени от начала регистрации искаженного радиоимпульса до начала регистрации отрицательного колоколообразного импульса tзN. Для этого сигнал с выхода детектора 6 поступает на квадратор 7-1, где его значение возводится в квадрат и подается на первый блок 8-1 извлечения квадратного корня, где происходит операция извлечения квадратного корня. Последние две процедуры производят операцию взятия модуля выделенной огибающей принятого сигнала. Далее импульсы с выхода первого блока 8-1 извлечения квадратного корня поступают на первый триггер 9-1 Шмитта, где из них формируются прямоугольные импульсы с крутыми фронтами, которые поступают на третий вход цифрового измерителя 20 длительности интервала времени, что останавливает подсчет квантующих импульсов его счетчиком. Квантование цифрового измерителя 20 длительности интервала времени осуществляется по его второму входу частотой fкв с выхода синхронизатора 1. Поскольку длительность интервала времени, измеряемого в цифровом измерителе 20, формируется в результате прохождения импульсом двойного расстояния до крайнего положения линейного объекта, то для получения значения t0 необходимо измеренное значение разделить на два, для чего используется делитель 21 на два.
В связи с тем, что фронт прямоугольного импульса с выхода второго триггера 9-2 Шмитта, запускающего цифровой измеритель 20 длительности интервала времени, не совпадает по времени с фронтом импульса квантующей последовательности, запускающего передатчик 2 с выхода синхронизатора 1, и априорно неизвестно время прихода прямоугольного импульса по третьему входу измерителя 20, то измеренное значение 2tн0 в виде числа 2N0, с выхода цифрового измерителя 20 длительности интервала времени будет иметь погрешность квантования начала Δtн0 и конца Δtк0 измеряемого интервала времени. Цифровые измерители длительности интервалов времени широко известны и достаточно глубоко описаны (например, в книге: Цифровая фазометрия. - Радио и связь, 1993, автор М.К.Чмых).
С выхода первого триггера 9-1 Шмитта прямоугольные импульсы также подаются на первый вход первого D-триггера 10-1, где они привязываются к периоду квантующей последовательности для синхронной работы последующей схемы. Далее сигнал с выхода первого D-триггера 10-1 подается на первый вход второго D-триггера 10-2, где он задерживается на один период квантующей последовательности tкв и затем подается на первый инвертор 11-1, где происходит его инверсия. Инверсный сигнал с выхода первого инвертора 11-1 подается на первый вход первой схемы 12-1 совпадений, на второй вход которой подается сигнал с выхода первого D-триггера 10-1, в результате чего на выходе первой схемы 12-1 совпадений синхронно с фронтами прямоугольных импульсов с выхода первого D-триггера 10-1 и с фронтами импульсов с выхода синхронизатора 1 формируются короткие прямоугольные импульсы длительностью, равной периоду квантующей последовательности tкв, которые подаются на первый вход схемы 13 логического сложения и на второй вход второй схемы 12-2 совпадений. На второй вход схемы 13 логического сложения подается импульс с выхода второго триггера 9-2 Шмитта, в результате чего формируется последовательность импульсов, представленная на эпюре 13 фиг.3, которая затем инвертируется во втором инверторе 11-2 и подается на первый вход (вход синхронизации) третьего D-триггера 10-3. В начальный момент времени на второй вход (вход данных) третьего D-триггера 10-3 подается уровень логической единицы, которая защелкивается на его выход по первому положительному фронту на первом его входе, тем самым сбрасывая через четвертый инвертор 11-4 состояние своего второго входа в уровень логического нуля. Состояние логической единицы на выходе третьего D-триггера 10-3 сохраняется до прихода на его первый вход следующего положительного фронта, сбрасывающего его выход в уровень логического нуля, тем самым через четвертый инвертор 11-4 устанавливая состояние своего второго входа в уровень логической единицы. Последующая работа триггера аналогична вышеописанному. Далее сигнал с выхода третьего D-триггера 10-3 подается на первый вход второй схемы 12-2 совпадений, в результате чего на ее выходе формируются два коротких импульса длительностью, равной периоду квантующей последовательности tкв. Длительность между импульсами с выхода второй схемы 12-2 совпадений соответствует длительности интервала времени от начала регистрации искаженного радиоимпульса до начала регистрации отрицательного колоколообразного импульса. Импульсы с выхода второй схемы 12-2 совпадений подаются на первые входы пятой и третьей схем 12-5 и 12-3 совпадений. Поскольку в начальный момент времени на второй вход третьей схемы 12-3 совпадений подается уровень логической единицы с выхода третьего инвертора 11-3, а на второй вход пятой схемы 12-5 совпадений подается уровень логического нуля, первый из импульсов с выхода второй схемы 12-2 совпадений через третью схему 12-3 совпадений поступает на первый вход JK-триггера 14, тем самым синхронно с импульсом, поступающим по третьему входу с синхронизатора 1, устанавливая его выход в уровень логической единицы, который подается на первый вход четвертой схемы 12-4 совпадений, на второй вход которой подаются импульсы квантующей последовательности с выхода синхронизатора 1, и тем самым происходит запуск счетчика 15. Уровень логической единицы на выходе JK-триггера 14 будет сохраняться до тех пор, пока на третью и пятую схемы 12-3 и 12-5 совпадений не поступит второй короткий импульс с выхода второй схемы 12-2 совпадений, на момент поступления которого на второй вход третьей схемы 12-3 совпадений будет подан уровень логического нуля, а на второй вход пятой схемы 12-5 совпадений - уровень логической единицы. Таким образом, второй короткий импульс с выхода второй схемы 12-2 совпадений через пятую схему 12-5 совпадений поступает на второй вход JK-триггера 14 и синхронно с синхронизатором 1 сбрасывает его состояние в уровень логического нуля, который далее через четвертую схему 12-4 совпадений останавливает работу счетчика 15.
Измеренное значение τзN в виде числа N1 с выхода счетчика 15 поступает на первый вход первого перемножителя 16-1, где оно умножается на константу V, поступающую на второй его вход с блока 22 ввода данных. С выхода первого перемножителя 16-1 число VN1 поступает на вход второго квадратора 7-2 и на второй вход второго перемножителя 16-2, на первый вход которого с выхода делителя 21 на два поступает значение t0 в виде числа N0, а на третий его вход поступает также константа V с блока 22 ввода данных. Во втором квадраторе 7-2 производится операция возведения в квадрат числа VN1. Число (VN1)2 с выхода второго квадратора 7-2 поступает на вход делителя 17 на четыре, с выхода которого число (VN1)2/4 поступает на первый вход сумматора 18, где оно складывается со значением V2N0N1, поступающим на второй его вход с выхода второго перемножителя 16-2. Значение (VN1)2/4+V2N0N1 с выхода сумматора 18 поступает на второй блок 8-2 извлечения квадратного корня, где происходит операция извлечения квадратного корня.
Значение L, соответствующее длине линейного контрастного подповерхностного объекта, с выхода второго блока 8-2 извлечения квадратного корня подается на индикаторный блок 19. На индикаторном блоке 19 отображается численное значение длины L линейного подповерхностного объекта 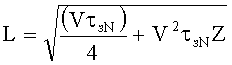
Таким образом, предлагаемое устройство по сравнению с прототипом позволяет определять длину линейного контрастного по электромагнитным характеристикам относительно вмещающего пространства подповерхностного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2433423C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| Устройство контроля радиолинии связи | 1985 |
|
SU1292193A1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1991 |
|
RU2010244C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
| Устройство для автоподстройки частоты | 1988 |
|
SU1653159A1 |
| ИЗМЕРИТЕЛЬ ДЕВИАЦИИ ЧАСТОТЫ СИГНАЛОВ С ГАРМОНИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2054680C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| Адаптивный фильтр | 1981 |
|
SU1042163A1 |
Изобретение относится к области радиотехники, преимущественно к радиолокации объектов, и может быть использовано для определения длины линейного контрастного по электромагнитным характеристикам относительно вмещающего пространства подповерхностного объекта. Технический результат заключается в возможности определения длины линейного контрастного по электромагнитным характеристикам относительно вмещающего пространства подповерхностного объекта. Устройство подповерхностного зондирования содержит приемо-передающую антенну, антенный коммутатор, передатчик, малошумящий усилитель, детектор, индикаторный блок, синхронизатор, два квадратора, два блока извлечения квадратного корня, два перемножителя, сумматор, делитель на два, цифровой измеритель длительности интервала времени и блок ввода данных, два триггера Шмитта, пять схем совпадений, четыре инвертора, три D-триггера, JK-триггер, схему логического сложения, делитель на четыре и счетчик. 3 ил.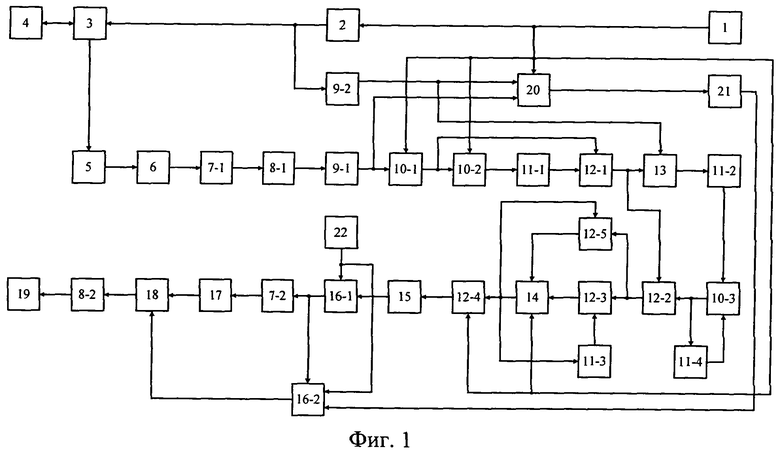
Устройство подповерхностного зондирования, включающее приемо-передающую антенну, антенный коммутатор, передатчик, малошумящий усилитель, детектор, индикаторный блок, синхронизатор, первый и второй квадраторы, первый блок извлечения квадратного корня, первый и второй перемножители, сумматор, делитель на два, цифровой измеритель длительности интервала времени и блок ввода данных, отличающееся тем, что дополнительно содержит два триггера Шмитта, пять схем совпадений, четыре инвертора, три D-триггера, второй блок извлечения квадратного корня, JK-триггер, схему логического сложения, делитель на четыре и счетчик, причем к выходу синхронизатора подключены последовательно соединенные передатчик, антенный коммутатор с подключенной к нему приемо-передающей антенной, малошумящий усилитель, детектор, первый квадратор, первый блок извлечения квадратного корня, первый триггер Шмитта, первый и второй D-триггеры, первый инвертор, первая схема совпадений, схема логического сложения, второй инвертор, третий D-триггер, вторая и третья схемы совпадений, JK-триггер, четвертая схема совпадений, счетчик, первый перемножитель, второй квадратор, делитель на четыре, сумматор, второй блок извлечения квадратного корня и индикаторный блок, между выходом передатчика и вторым входом сумматора последовательно включены второй триггер Шмитта, цифровой измеритель длительности интервала времени, делитель на два и второй перемножитель, второй вход которого соединен с выходом первого премножителя, а его третий вход соединен с блоком ввода данных и вторым входом первого перемножителя, второй вход JK-триггера соединен с выходом пятой схемы совпадений, первый вход которой соединен с выходом второй схемы совпадений, а ее второй вход подключен к выходу JK-триггера и входу третьего инвертора, который выходом соединен со вторым входом третьей схемы совпадений, между выходом и вторым входом третьего D-триггера включен четвертый инвертор, выход синхронизатора также соединен с третьим входом JK-триггера и со вторыми входами первого и второго D-триггеров, четвертой схемы совпадений и цифрового измерителя длительности интервала времени, чей третий вход соединен с выходом первого триггера Шмитта, второй вход первой схемы совпадений соединен с выходом первого D-триггера, второй вход второй схемы совпадений соединен с выходом первой схемы совпадений, а второй вход схемы логического сложения соединен с выходом второго триггера Шмитта.
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2433423C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| US 5900833, 04.05.1999 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

