Изобретение относится к радиолокации и может быть использовано при разработке портативных радиолокаторов для дистанционного исследования природной среды, включая подповерхностную радиолокацию Земли.
Известен способ подповерхностного зондирования (журнал "Зарубежная радиоэлектроника", N 1, 1991 г., стр.96), в котором сформированный генератором импульсов короткий видеоимпульс, посылают для ударного возбуждения широкополосной передающей антенны. Отраженный целью сигнал принимается приемной антенной, усиливается широкополосным усилителем и преобразуется в стробоскопическом преобразователе. Дальнейшая обработка сигнала происходит на низкой частоте.
Недостатком такого способа является то, что формируемое изображение не является объемным изображением, а представляет собой вертикальное сечение грунта и встречающихся в нем объектов. Кроме того, изображение, полученное этим способом, имеет низкую угловую разрешающую способность (несколько десятков сантиметров) из-за низких направленных свойств антенн.
Известен метеорологический ЛЧМ-радар с непрерывным сигналом, который предназначен для подповерхностного радиолокационного зондирования и содержит последовательно соединенные модулятор, генератор высокой частоты и передающую антенну, а также последовательно соединенные приемную антенну, усилитель высокой частоты и смеситель, второй вход которого соединен со вторым выходом генератора высокой частоты. Выход смесителя через гребенчатый режекторный фильтр подключен к формирователю импульсов и анализатору спектра (SU, а.с. N 1751708, кл. G 01 S 13/00, 1992).
Однако известное устройство имеет ограниченные возможности, а именно: не позволяет получить объемного изображения объекта, а также проводить исследования на большие глубины с требуемой точностью, и, кроме этого, оно имеет низкую разрешающую способность получаемого изображения.
Известен радиолокационный способ подповерхностного зондирования (журнал "Зарубежная радиоэлектроника", N 1, 1991 г., стр. 108), который применяется при решении таких задач, как измерение толщины и определение местоположения подповерхностных слоев, локализации канализационных и подземных коммуникаций, контроль за состоянием полотна дорог и др., и который является наиболее близким по технической сущности к заявляемому способу.
В наиболее близком известном решении реализуется известный запросный способ определения дальности (глубины), при котором измеряется время запаздывания отраженного сигнала относительно излученного из формулы;
τз= 2R√ε′/C,
где τз - измеряемое время задержки;
R - вычисляемая дальность (глубина),
√ε′ - комплексная диэлектрическая проницаемость среды;
C - скорость распространения электромагнитной волны,
вычисляют искомую дальность (глубину) и после цифровой обработки отраженного сигнала выдают потребителю информацию в виде графической зависимости принимаемого сигнала от времени, т.е. дальности (глубины). Это изображение является вертикальным сечением обследуемого объекта подповерхностного слоя Земли. Т.е. вместо объемного изображения объекта прототип формирует вертикальную проекцию, по которой невозможно идентифицировать объект.
Известный способ заключается в следующем: формируют короткий видеоимпульс для ударного возбуждения широкополосной передающей антенны, которая излучает сигнал в направлении исследуемого пространства. Отраженный целью сигнал принимается приемной антенной, усиливается широкополосным усилителем и преобразуется в стробоскопическом преобразователе. Дальнейшая обработка сигналов происходит уже на низкой частоте.
Этот способ обладает следующими недостатками:
- не позволяет получить объемного изображения цели. Зондирование производится путем перемещения антенн вдоль одной координаты. Текущая информация отображается на экране индикатора или телевизионном мониторе в виде графической зависимости принимаемого сигнала от времени, т.е. от глубины.
Формируемое изображение представляется в виде вертикального сечения (среза) грунта. Исследуемые объекты также представляются в виде сечений, что затрудняет их идентификацию.
- обладает низкой точностью измерения величины глубины залегания исследуемых объектов из-за отсутствия точной информации о значении диэлектрической проницаемости Земли, а также низкой угловой разрешающей способностью из-за плохих направленных свойств антенн.
Наиболее близким по технической сущности к заявляемому устройству является импульсный переносной портативный геолокатор [Osumi N., Ueno K. - In: Proc. Int. Symp on Noise and Clutter Rejin. Radars and Imag. Sens., Tokyo. 1984] , реализующий вышеописанный способ, содержащий передающую и приемную антенны, генератор тактовых импульсов, микропроцессорный вычислительный блок, усилитель, стробоскопический преобразователь, аналого-цифровой преобразователь, дисплей, пульт управления, формирователь строб-импульсов, генератор видеоимпульсов.
Недостатком известного устройства является невозможность получения объемного изображения обследуемых объектов, т.к. в нем сканирование антенными устройствами осуществляется за счет перемещения только в одном направлении обследуемого пространства. Недостатком известного геолокатора является также большая величина амплитуды формируемого зондирующего импульса (100 В), что не позволяет использовать в нем серийно выпускаемые микросхемы. Кроме того, использование в нем малошумящего стробоскопического приемника значительно усложняет и удорожает устройство и также не позволяет его реализовать на стандартных микросхемах.
Технический результат, который достигается при осуществлении способа, заключается в том, что разработанный способ радиолокационного зондирования, позволяет формировать объемное изображение исследуемых объектов с высокой (достигающих единиц сантиметров!) точностью, определять до них расстояние (в том числе и при расположении их в грунте), значительно повысить чувствительность за счет повышения соотношения сигнал/шум путем синфазного суммирования мощности зондирующих сигналов передающей антенны.
Технический результат, достигаемый при реализации устройства формирования радиолокационного изображения, заключается в том, что устройство обеспечивает радиолокационное формирование объемного изображения объекта с высокой разрешающей способностью, при этом оно является технологичным и может быть реализовано на стандартных микросхемах, а следовательно, относительно недорогим. Кроме того, устройство обеспечивает формирование объемного изображения объекта и измерение дальности до него в абсолютных единицах (метрах), что также подтверждает эффективность технического решения.
Сущность изобретения поясняется на чертежах: на фиг.1 изображена структурная схема устройства формирования радиолокационного изображения объекта, поясняющая техническую сущность заявляемых способа и устройства, где
1 - приемная антенна,
2 - передающая антенна,
3 - генератор видеоимпульсов с изменяемой задержкой,
4 - усилитель,
5 - цифроаналоговый преобразователь (ЦАП),
6 - блок выборки и запоминания,
7 - блок перестраиваемых строб-импульсов (БПСИ),
8 - аналого-цифровой преобразователь (АЦП),
9 - генератор тактовых импульсов
10 - микропроцессорный вычислительный блок (МВБ),
11- дисплей,
12- пульт управления МВБ, на фиг. 2 изображена схема генератора видеоимпульсов с изменяемой задержкой, где
13 - генератор одиночных импульсов,
14 - первый цифроаналоговый преобразователь (ЦАП-1),
15 - второй цифроаналоговый преобразователь (ЦАП-2),
16 - первая перестраиваемая линия задержки (ПЛЗ-1),
17 - вторая перестраиваемая линия задержки (ПЛЗ-2),
18 - элемент "ИЛИ",
19 - RS - триггер,
20 - усилитель мощности, на фиг. 3 изображена структурная схема блока перестраиваемого строб-импульса, где
21 - генератор одиночных импульсов,
22 - RS- триггер,
23 - элемент "И",
24 - первый цифроаналоговый преобразователь (ЦАП-1),
25 - второй элемент "И",
26 - второй цифроаналоговый преобразователь (ЦАП-2),
27 - первая перестраиваемая линия задержки (ПЛЗ-1),
28 - вторая перестраиваемая линия задержки (ПЛЗ-2),
29 - первый счетчик,
30 - второй счетчик,
31 - элемент "ИЛИ"
Сущность заявляемого способа заключается в следующем:
В известных способах повышения угловой разрешающей способности с помощью фокусировки антенн [1], проведения апертурного синтеза при перемещении антенны [2] , томографических методов [3] с компьютерной обработкой принятых сигналов в лучшем случае достигают угловую разрешающую способность, равную длине волны зондирующего сигнала в атмосфере. В грунте угловая разрешающая способность ухудшается, так как для снижения энергетических потерь при распространении электромагнитных волн приходится использовать более низкий диапазон частот, что во взаимодействии с диэлектрической проницаемостью грунта уменьшают фокусирующие свойства антенн в 2 - 3 раза.
Апертурный синтез требует для своей реализации значительных скоростей перемещения, что трудно обеспечить в городских условиях.
Теория томографического метода только начала развиваться и о большинстве алгоритмических программ, реализующих этот метод, лишь с натяжкой можно сказать, что они работают удовлетворительно.
Указанные недостатки не позволяют получить известными способами высокой разрешающей способности радиолокационных изображений.
Предлагаемый метод основан на обратном преобразовании разностно-дальномерных угловых координат.
В предлагаемом способе решается обратная, по сравнению с прототипом, задача: по заранее известным угловым координатам (временным задержкам) элементов объема в трехмерном пространстве, относительно антенн, вычисляют разности временных задержек, которые необходимо установить между моментами излучения зондирующих сигналов передающими антеннами для того, чтобы получить синфазное сложение мощностей этих зондирующих сигналов непосредственно на поверхности каждого заданного элемента объема в трехмерном пространстве. Получаемый таким образом выигрыш от сложения мощностей позволяет в N раз (где N > 1-число передающих антенн) улучшить соотношение сигнал/шум, которое можно использовать для селекции отраженных сигналов. Принятые цифровые сигналы преобразуют в цифровой эквивалент, которому ставят в соответствие полутоновую окраску того элемента объема, от которого поступил этот отраженный сигнал. Последовательно воспроизводя на экране дисплея элементы объема и окрашивая их в соответствующие полутона, получим объемное изображение объема вместе с находящимися в нем объектами. Для этого предварительно производят выбор размера и формы исследуемого объема в трехмерном пространстве, в пределах которого устройство будет вести сканирование для формирования радиолокационного изображения на дисплее. Далее выбранный объем представляют состоящим из одинаковых частей - элементов объема, которые в дальнейшем будут определять разрешающую способность изображения. Чем меньше размер выбранного элемента объема, тем выше разрешающая способность изображения и тем дольше будет вестись формирование изображения. Из радиолокации известно, что по принятым от точечной цели на две разнесенные приемные антенны отраженных сигналов, можно вычислить угловые координаты этой цели. Если принять за эту точечную цель каждый элемент объема, то с помощью антенн радиолокатора (считая все приемными) можно будет вычислить их координаты. Для этого достаточно измерить расстояние (R) от каждого элемента объема до каждой антенны и вычислить соответствующие задержки (τз) по формуле:
τз= R/C√ε′,
где C - скорость распространения электромагнитной волны в атмосфере,
ε′ - комплексная диэлектрическая проницаемость среды.
Под обратным преобразованием разностно-дальномерных угловых координат понимается то, что после выбора угловых координат элементов объема (точечных целей) с помощью N (N > 1) передающих антенн по определенному алгоритму, учитывающего эти координаты, поочередно излучаются зондирующие сигналы, мощности которых синфазно складываются на поверхности выбранного элемента объема (точечной цели). Формируемый при этом отраженный сигнал будет нести информацию как о величине отраженного сигнала, так и о координатах точечной цели, выраженных через временную задержку прихода отраженного сигнала на вход приемной антенны.
Это значит, что для заданного объема можно один раз вычислить координаты его элементов объема и проводить их сканирование путем считывания из памяти соответствующих координат, выраженные через величины временных задержек.
Для N передающих антенн можно провести синтезирование зондирующего сигнала по следующему алгоритму.
Среди найденных задержек для каждого элемента объема определяется максимальная задержка сигнала τmax. Антенна (или антенны), которая имеет τmax, излучает первой. Для остальных передающих антенн вычисляются разности временных задержек Δτз, между τmax и временной задержкой антенны τз. Полученные значения Δτз определяют очередность и момент включения каждой передающей антенны по принципу: чем больше Δτз , тем позже должна быть включена антенна.
Излучение всеми передающими антеннами зондирующих сигналов согласно рассмотренному алгоритму позволяет сложить мощности этих сигналов синфазно на поверхности элементов объема, угловые координаты которых в виде временных задержек учитывались при синтезе зондирующего сигнала.
Последовательно изменяя времена задержек, можно провести сканирование всех элементов отображаемого изображения. Для того, чтобы исключить прием ложных отраженных сигналов, производится стробирование блока выборки и запоминания аналого-цифрового преобразователя сигнала. Момент поступления строба определяется суммой времени задержек - τстр= τmax+τпр, где
τmax - максимальная задержка передающей антенны,
τпр - задержка приемной антенны.
Полученные значения отраженных сигналов от каждого элемента отображаемого изображения оцифровываются и запоминаются в виде трехмерной решетки, соответствующей расположению элементов объема в трехмерном пространстве. При этом, каждому цифровому эквиваленту ставиться в соответствие окраска полутонов соответствующей точки на формируемом изображении объекта на дисплее.
Сущность предлагаемого способа формирования объемного радиолокационного изображения основана на решении задачи, при которой подлежащий исследованию объем трехмерного пространства представляют состоящим из некоторого количества точечных целей (элементов объема), равномерно расположенных в каком-то объеме, например кубе размером - 2х2х2 м3. При этом плотность распределения точечных целей будет определять разрешающую способность будущего объемного изображения.
Полученные значения временных задержек записывают в память и используют для решение задачи, которая является обратной по сравнению с задачей, решаемой в прототипе, в которой по полученным временным задержкам синхронизируется момент излучения сигналов каждой передающей антенной по принципу: последним пришел (при приеме) - первым ушел (при передаче) или насколько опередил (при приеме) - настолько отстал (при передаче). Тогда первым будет излучаться сигнал, который имеет максимальную временную задержку в случае работы антенны на прием. И далее излучаются все остальные сигналы в соответствии со значениями временных задержек.
В этом случае все сигналы, излученные каждой антенной, суммируются в одной соответствующей точечной цели и облучают ее. Полученный при этом отраженный сигнал будет приниматься приемной системой по стробу, формируемому в соответствии с ранее вычисленной временной задержкой. Принятый отраженный сигнал преобразуется в цифровой код и записывается в память МВБ. Величина этого сигнала характеризует отражательную способность цели. После облучения всех точечных целей и получения массива отраженных сигналов производят построение объемного изображения.
При этом место расположения каждой точечной цели на экране дисплея окрашивается в определенный тон, пропорциональный величине соответствующего отраженного сигнала.
При этом общими существенными признаками заявляемого способа и наиболее близкого аналога являются:
излучение передающей антенной зондирующего сигнала в направлении объекта, расположенного в исследуемом объеме трехмерного пространства, последующем приеме отраженного от объекта сигнала, его обработке и формировании изображения объекта.
Отличительными существенными признаками заявляемого способа являются следующие: осуществляют последовательное излучение зондирующих сигналов N (N > 1) передающими антеннами в направлении выбранного объема исследуемого пространства, которое представляют состоящим из К (К > 2) элементов, до каждого из которых предварительно вычисляют временные задержки распространения сигнала τз от каждой из N передающих антенн и приемной антенны, при этом последовательность излучения зондирующих сигналов каждой из N передающих антенн до каждого из К элементов объема устанавливают исходя из вычисленных ранее значений временных задержек распространения сигнала τз , причем, по крайней мере, одна передающая антенна, значение временной задержи которой до K-го элемента объема является наибольшей - τзmax , первой излучает зондирующий сигнал, а момент включения каждой последующей передающей антенны определяют исходя из абсолютного значения разности временной задержки Δτз между τзmax и временными задержками распространения сигнала τз остальных антенн до этого же элемента объема, причем передающая антенна, для которой Δτз для этого же элемента объема является наибольшей, последней излучает зондирующий сигнал, осуществляют синфазное сложение по мощности зондирующих сигналов на поверхности каждого из К элементов объема в момент времени, соответствующий максимальному значению временной задержки τзmax соответствующей передающей антенны, причем при наличии неоднородностей структуры в K-ом элементе объема приемная антенна осуществляет прием сигнала, отраженного от этих неоднородностей, в моменты времени, равные суммарной временной задержке распространения сигнала τзmax передающей и τз приемной антенны, выделяют из отраженных сигналов информационные сигналы, уровень мощности которых превышает установленный сигнальный порог, оцифровывают выделенные информационные сигналы и запоминают их в виде цифровых сигналов, которым ставят в соответствие полутоновую окраску соответствующего элемента исследуемого объема, формируют изображение исследуемого объема в соответствии с полутоновой окраской его элементов.
Сущность заявляемого устройства формирования радиолокационного изображения заключается в следующем: в устройство, содержащее передающую антенну, последовательно соединенные приемную антенну и усилитель, а также последовательно соединенные аналого-цифровой преобразователь (АЦП), микропроцессорный вычислительный блок (МВБ), дисплей, а также генератор тактовых импульсов, пульт управления, выход которого соединен с управляющим входом микропроцессорного вычислительного блока, к тактовому входу которого подключен генератор тактовых импульсов, дополнительно введены N-1 передающих антенн, N генераторов видеоимпульсов с изменяемой задержкой, выход каждого из которых соединен соответственно с входом каждой из N передающих антенн, а также введены цифроаналоговый преобразователь (ЦАП), блок выборки и запоминания, блок перестраиваемых строб-импульсов, первый выход которого соединен с входом управления ЦАП, а второй выход соединен соответственно с входом управления блока выборки и запоминания и с входом управления АЦП, к входу которого подключен выход блока выборки и запоминания, вход которого соединен с выходом усилителя, вход управления которого соединен с выходом ЦАП, цифровые входы которого объединены с цифровыми входами блока перестраиваемых строб-импульсов, каждого из N генераторов видеоимпульсов с изменяемой задержкой и через цифровую шину соединены с цифровыми выходами МВБ, выход "запуска" которого соединен соответственно с входом "запуск" блока перестраиваемых строб-импульсов, входом "запуск" каждого из N генераторов видеоимпульсов с изменяемой задержкой, тактовые входы которых объединены и подключены к тактовому входу генератора тактовых импульсов и блока перестраиваемых строб-импульсов, вход "сброс" которого объединен с входом "сброс" каждого из N генераторов видеоимпульсов с изменяемой задержкой и подключен к выходу "сброс" МВБ. На фиг.1 приведены структурная схема устройства формирования радиолокационного изображения объекта, которое содержит приемную антенну (1) и N передающих (2) антенн. К входу каждой из N передающих антенн (2) подключен соответственно генератор (3)видеоимпульсов с изменяемой задержкой (ГВИЗ), который служит для определения момента включения соответствующей антенны и для формирования длительности излучаемых передающими антеннами импульсных сигналов, т.к. с увеличением глубины зондирования увеличивается затухание в грунте, то необходимо с ростом глубины увеличить энергетику зондирующих импульс за счет расширения их длительности.
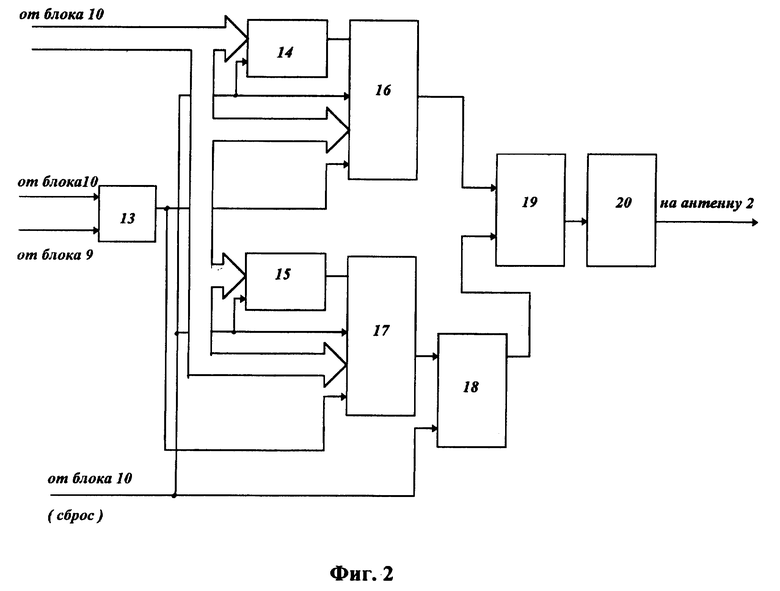
Генератор видеоимпульсов с изменяемой задержкой (3) (фиг. 2) содержит генератор одиночных импульсов (13), первую (16) и вторую (17) перестраиваемую линию задержки, RS- триггер (19), элемент "ИЛИ" (18), усилитель мощности (20), причем входы первого (14) цифроаналогового преобразователя (ЦАП-1) и второго (15) цифроаналогового преобразователя (ЦАП-2), первой перестраиваемой линии (16) задержки (ПЛЗ-1) и второй перестраиваемой линии (17) задержки (ПЛЗ-2) объединены и являются цифровыми входами устройства, другими входами которого являются соответственно вход "запуск" и тактовый вход генератора одиночных импульсов (13), выход которого соединен одновременно с логическими входами первой (16) и второй (17) перестраиваемых линий задержки, аналоговые входы каждой из которых подключены соответственно к выходам первого (14) и второго (15) цифроаналоговых преобразователей, входом устройства является также вход "сброс", соединенный соответственно со входами "сброс" ЦАП-1 (14), ПЛЗ-1 (16), ЦАП-2 (15), ПЛЗ-2 (17), элемента "ИЛИ" (18), при этом выход первой перестраиваемой линии задержки (16) соединен с S-входом RS- триггера (19), R-вход которого подключен к выходу элемента "ИЛИ" (18), другой вход которого соединен с выходом второй перестраиваемой линией задержки (17), причем выход RS-триггера соединен с входом усилителя мощности (20), выход которого является выходом устройства.
На фиг.2 приведена структурная схема генератора видеоимпульсов с изменяемой задержкой, содержащий генератор одиночных импульсов (13), первую (16) и вторую (17) перестраиваемую линию задержки, RS-триггер (19), элемент "ИЛИ" (18), усилитель мощности (20), причем входы первого (14) цифроаналогового преобразователя (ЦАП-1) и второго (15) цифроаналогового преобразователя (ЦАП-2), первой перестраиваемой линии задержки (ПЛЗ-1) (16) и второй перестраиваемой линии задержки (ПЛЗ-2) (17) объединены и являются цифровыми входами устройства, другими входами которого являются соответственно вход "запуск" и тактовый вход генератора одиночных импульсов (13), выход которого соединен одновременно с логическими входами первой (16) и второй (17) перестраиваемых линий задержки, аналоговые входы каждой из которых подключены соответственно к выходам первого (14) и второго (15) цифроаналоговых преобразователей, а также входом устройства является вход "сброс", соединенный соответственно со входами "сброс" ЦАП-1 (14), ПЛЗ-1 (16), ЦАП-2 (15), ПЛЗ-2 (17), элемента "ИЛИ" (18), при этом выход первой перестраиваемой линии задержки (16) соединен с S - входом RS-триггера (19), R-вход которого подключен к выходу элемента "ИЛИ" (18), другой вход которого соединен с выходом второй перестраиваемой линией задержки (17), причем выход RS-триггера (19) соединен с входом усилителя мощности (20), выход которого является выходом устройства.
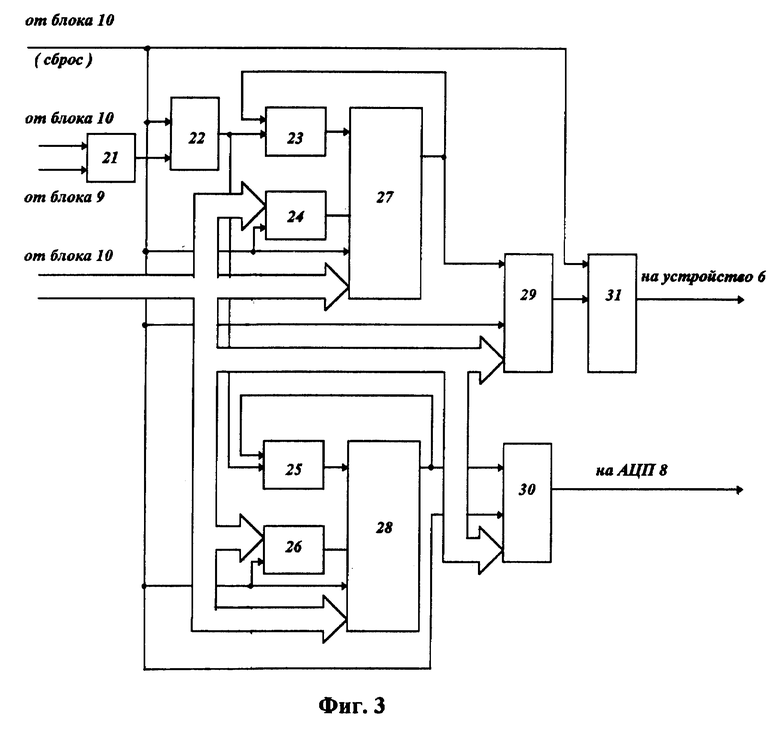
На фиг. 3 приведена структурная схема блока перестраиваемых строб-импульсов. Блок перестраиваемых строб-импульсов содержит генератор одиночных импульсов (21), RS-триггер (22), первый элемент "И" (23) и второй элемент "И" (25), первый (24) и второй (26) цифроаналоговые преобразователи, первую (27) и вторую (28) перестраиваемую линии задержки, первый (29) и второй (30) счетчики, элемент "ИЛИ" (31), причем цифровые входы первого (24) и второго (26) цифроаналоговых преобразователей, первой (27) и второй (28) перестраиваемой линии задержки первого (29) и второго (30) счетчика объединены цифровой шиной и являются цифровым входом устройства, при этом R-вход RS-триггера (22), входы "сброс" соответственно первого (24) и второго (26) цифроаналогового преобразователя, первой (27) и второй (28) перестраиваемой линии задержки, первого (29) и второго (30) счетчиков, элемента "ИЛИ" (31) объединены и являются входом "сброс" устройства, другими входами которого являются соответственно вход "запуск" и тактовый вход генератора одиночных импульсов (21), выход которого соединен с S-входом RS-триггера (22), выход которого подключен соответственно к входу первого (23) и второго (25) элементов "И", другие входы каждого из которых подключены соответственно к объединенным выходу первой перестраиваемой линии задержки (27) и третьему входу первого счетчика (29) и объединенным выходу второй перестраиваемой линии задержки (28) и третьему входу второго счетчика (30), а выходы первого (23) и второго (25) элементов "И" соединены соответственно с входами первой (27) и второй (28) перестраиваемой линии задержки, другие входы каждой из которых соединены соответственно с выходом первого (24) и второго (26) цифроаналогового преобразователя, при этом выход первого счетчика (29) соединен с другим входом элемента "ИЛИ" (31), выход которого является первым выходом устройства, вторым выходом которого является выход второго счетчика (30).
Сущность работы устройства заключается в следующем:.
В предлагаемом устройстве производится излучение нескольких зондирующих сигналов с временным сдвигом относительно зондирующего сигнала, излучаемого первым.
Временные сдвиги определяются по координатам выбранного для зондирования элемента. В этом случае излучаемые зондирующие сигналы будут синфазно складываться по мощности на поверхности этого элемента и, если в этом месте будет находиться какой-либо объект или структурная неоднородность, то произойдет формирование отраженного сигнала.
Величина этого сигнала будет пропорциональна суммарной мощности зондирующих сигналов и будет превышать средний уровень помех, формируемых одиночными зондирующими сигналами, что облегчает задачу приема отраженного сигнала с помощью порогового устройства. Вместе с тем, для исключения приема ложных отраженных сигналов от близлежащих объектов, которые в некоторых случаях смогут превысить выбранный сигнальный порог, вводится стробирование принимаемых сигналов.
Величину временной задержки формирования строб-импульса можно вычислить из координат зондируемого элемента. Выделенный отраженный сигнал оцифровывают, и его амплитуду используют для выбора интенсивности полутоновой окраски зондирующего элемента на формируемом с помощью дисплея изображении.
Таким образом, предлагаемое устройство производит поэлементное формирование объемного изображения путем считывания из памяти ранее определенных координат зондируемых элементов. Координаты зондируемых элементов определяются следующим образом: вначале задаются объемом, в пределах которого будет вестись зондирование его элементов. Выбранный объем разбивают на более мелкие элементы объема, которые определяют разрешающую способность формируемого изображения. Вычисляют расстояния R от каждого элемента объема до каждой из передающих N (N > 1) антенн и приемной антенны. Переводят полученные значения R во временные задержки распространения сигнала по формуле:
τз= 2R√ε′/C,
где τз - временная задержка распространения сигнала от антенн до зондируемого элемента объема;
R - расстояние от каждой антенны до зондируемого элемента;
ε′ - комплексная диэлектрическая проницаемость среды;
C - скорость распространения электромагнитной волны.
При технической реализации предлагаемого устройства вместо абсолютных значений временных задержек распространения сигнала от передающих антенн используют также их разностные задержки Δτз , определяемые по формуле:
Δτз= τmax-τз,
где τmax - максимальная временная задержка распространения сигнала от передающей антенны до K-го элемента объема;
τз - временные задержки остальных антенн для заданного элемента объема.
В этом случае для синфазного сложения мощностей зондирующих сигналов на поверхности K-го элемента объема необходимо первым излучить зондирующий сигнал передающей антенной, которая имеет τmax. Вслед за этим сигналом излучаются остальные зондирующие сигналы в порядке увеличения их разностных задержек Δτз и с временным сдвигом, равным абсолютному значению Δτз соответствующей антенны.
Наряду с вычислением разностных задержек Δτз для каждого зондируемого элемента объема вычисляют временную задержку формирования строб-импульса по формуле:
где τзс - временная задержка формирования строб-импульса;
τmax - максимальная временная задержка передающей антенны для заданного элемента объема;
τпр - временная задержка распространения сигнала от соответствующего элемента объема до приемной антенны.
Полученные значения разностных задержек и временной задержки формирования строб-импульса для каждого элемента заданного объема записываются в память микропроцессорного вычислительного блока (МВБ) в виде координат элементов объема.
Таким образом, работа предлагаемого устройства состоит из следующих основных этапов: из памяти МВБ считываются очередные координаты соответствующего элемента объема. В соответствии с этими координатами формируются и излучаются передающими антеннами зондирующие сигналы. С помощью формируемых строб-импульсов осуществляется прием и оцифровка отраженного сигнала, амплитуда которого определяет полутоновую раскраску соответствующего элемента объема, формируемого с помощью дисплея изображения.
В каждом цикле формирования зондирующих сигналов происходит считывание из памяти микропроцессорного вычислительного блока 10 кодов, соответствующих координатам очередного зондируемого элемента объема и запись их в блоки З1.. .Зn, а также считывание и запись кодов для формирования строб-импульсов блоком 7. С первого выхода блока 7 на управляющий вход блока 5 дважды за цикл выдаются импульсы, записывающие входной код сигнала. Вначале выдается импульс сброса от блока 10, по которому происходит запись кода в блок 5, с помощью которого на выходе блока 5 формируется напряжение, запирающее блок 4. Блок 4 остается закрытым до момента появления на первом выходе строб-импульса, записывающего в блок 5 новый код, который формирует на выходе блока 5 напряжение, отпирающее блок 4 и устанавливающее значение его коэффициента усиления в зависимости от дальности зондируемого элемента объема. Чем дальше от антенн находится элемент объема, тем больше значение имеет его коэффициент усиления. Формирование зондирующих сигналов происходит следующим образом. По сигналу "сброс", поступающему непосредственно с блока 10 (фиг.2), происходит установка в ноль блока 19 через блок 18, первый вход которого соединен с шиной "сброс". Одновременно этим же сигналом происходит запись кодов с информационной магистрали, соединенной с блоком 10 (фиг. 1) и подключенной ко входам (фиг.2) блоков: 14 - 17. Причем в блоки 14 и 16 записывается код, равный значению разности задержки, а в блоки 15 и 17 код, соответствующий длительности формируемого зондирующего сигнала. При поступлении на первый вход блока 13 импульса запуска от блока 10 начнется формирование на его выходе одиночного импульса, фронт нарастания которого будет привязан к тактовой сетке блока 9, поступающей на второй вход блока 13. С выхода блока 13 одиночный импульс поступит на логические входы блоков 16, 17 и в зависимости от величины кодов, записанных в блоки 14, 16 и определяющих величину временной задержки формируемого зондирующего сигнала, произойдет установка в единичное состояние блока 19. С выхода блока 19 формируемый зондирующий сигнал поступит на вход блока 20, а с его выхода на вход одной из соответствующих антенн 2 - 2n (фиг. 1).Через время, равное длительности формируемого зондирующего сигнала, на выходе блока 17, соединенного со вторым входом блока 18, появится одиночный импульс, который с выхода блока 18 установит в нулевое состояние блок 19, завершив тем самым формирование зондирующего сигнала. Излученные всеми передающими антеннами зондирующие сигналы синфазно сложатся по мощности на поверхности соответствующего элемента объема и образуют отраженный сигнал (если присутствует неоднородность), который поступит на вход блока 1 (фиг. 1) и с его выхода - на вход блока 4. До момента поступления ожидаемого отраженного сигнала блок 4 будет закрыт и откроется строб-импульсом с первого выхода блока 7. Работа блока 7 происходит следующим образом (фиг. 3): по сигналу "сброс", поступающего от блока 10, происходит установка в ноль блока 22 по первому входу, запись кодов, установленных на информационной магистрали, приходящей от блока 10 на входы блоков 24, 26, 27, 28 - 30. При этом в блоки 24, 27 записывается код, устанавливающий такую величину задержки блока 27, при которой формируемый период частоты на выходе блока 27, при его работе в режиме автогенерации составляет целое число периодов, укладывающихся в формируемой временной задержке выдачи строб-импульса с первого выхода блока 7 (фиг. 1) на управляющий вход блока 5. Аналогично коды, которые записываются в блоки 26, 28 (фиг. 3), устанавливают в блоке 28 величину задержки, при которой формируемый период частоты на выходе блока 28 при его работе в режиме автогенерации составляет целое число периодов, укладывающихся в формируемой временной задержке выдачи строб-импульса со второго выхода блока 7 (фиг. 1) на управляющие входы блоков 6, 8. По импульсу "сброс" в блоки 29, 30 записываются дополнительные коды, с помощью которых формируются на выходах блоков 29, 30 импульсы переполнения при получении в них двоичных чисел, соответствующих временным задержкам выдачи строб-импульсов соответственно на первом и втором выходах блока 7 (фиг.1).
При поступлении от блока 10 на первый вход блока 21 импульса запуска произойдет формирование на его выходе одиночного импульса, привязанного к тактовой сетке генератора тактовых импульсов 9, выход которого соединен со вторым входом блока 21. Одиночный импульс выхода блока 21 установит в единичное состояние блок 22.
Выходной сигнал блока 22 откроет по первым входам блоки 23, 25, через которые соответственно выход блока 27 соединится со своим логическим входом и выход блока 28 соединится также со своим входом. При этом блоки 27 и 28 перейдут в режим автогенерации и на их выходах появятся последовательности импульсов, которые начнут подсчитывать соответственно блок 29 и блок 30. Т. к. в эти блоки введены дополнительные коды, то по достижению на их выходах двоичных чисел, соответствующих значениям временных задержек выдачи строб-импульсов, соответственно с первого и второго выходов блока 7 произойдет переполнение этих блоков и на их выходах появятся импульсы переполнения, соответственно с выхода блока 29 импульс переполнения пройдет через блок 31 и поступит на управляющий вход блока 5. С выхода блока 30 импульс переполнения поступит на управляющие входы блоков 6, 8. Пришедший на управляющий вход блока 5 строб-импульс, сформированный из импульса переполнения блока 7, запишет в блок 5 новый код, в результате чего на его выходе установится напряжение, которое откроет блок 4, и отраженный сигнал пройдет через блок 4 и поступит на сигнальный вход блока 6. После завершения переходных процессов в блоках 4, 6 на управляющий вход блоков 6, 8 поступит строб-импульс, сформированный из импульса переполнения блока 30, и этот строб-импульс произведет запись отраженного сигнала в аналоговую память блока 6. Одновременно этот же строб-импульс поступит на управляющий вход блока 8 и произведет его запуск. При этом поступающий на его вход расширенный отраженный сигнал из аналоговой памяти блока 6 преобразуется в цифровой сигнал и в виде 8 разрядного параллельного двоичного кода с выхода блока 8 перепишется в память блока 10. Полученный цифровой код однозначно соответствует амплитуде отраженного сигнала, и поэтому в память блока 10 он записывается рядом с координатами соответствующего элемента объема. Блок 10 формирует на экране блока 11 в определенном масштабе видеоизображение, которое отображает содержимое заданного объема с помощью элементов объема. Воспроизводимые элементы объема окрашиваются на видеоизображении в полутона, яркость которых будет зависеть от соответствующих величин амплитуд принимаемых отраженных сигналов.
Управление блоком 10 производится с помощью блока 12, который позволяет включать и выключать устройство в целом, переходить из режима тестирования в штатный режим работы, производить остановы для анализа полученных изображений, изменять масштаб формируемого изображения, вносить изменения в координаты элементов объемов, хранившихся в памяти блока 10.
Технический результат, который достигается при осуществлении способа, заключается в том, что разработанный способ радиолокационного зондирования позволяет формировать объемное изображение исследуемых объектов с высокой (достигающих единиц сантиметров!) точностью, определять до них расстояние (в том числе и при расположении их в грунте), значительно повысить чувствительность, за счет повышения соотношения сигнал/шум путем синфазного суммирования мощностей зондирующих сигналов каждой передающей антенны, а при реализации устройства формирования радиолокационного изображения обеспечивается радиолокационное формирование объемного изображения объекта с высокой разрешающей способностью, при этом устройство является технологичным и может быть реализовано на стандартных микросхемах, а следовательно, относительно недорогим. Кроме того, устройство обеспечивает формирование объемного изображения объекта и измерение дальности до него в абсолютных единицах (метрах), что также подтверждает эффективность технического решения.
Литература
[1] Андреев Г. А., Потапов А.А. - Зарубежная радиоэлектроника, 1984, N 11.
[2] Osumi N., Ueno К. - IN. Pros. Int. Symp, on Noise and Clutter Rejin. Radars and Imag. Sens., Tokyo. 1984.
[3] Sakamoto Y.e.s. - LEEE Trans, 1988, V. GE-26, N 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ КАЧАЮЩЕЙСЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2143779C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486538C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486537C2 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| Радиолокационная станция | 2021 |
|
RU2755518C1 |
| Способ и устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (варианты) | 2023 |
|
RU2810535C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2138064C1 |
Изобретение относится к радиолокации и может быть использовано при разработке портативных радиолокаторов для дистанционного исследования природной среды, включая подповерхностную радиолокацию Земли. Технический результат, который достигается при осуществлении способа, заключается в том, что разработанный способ радиолокационного зондирования позволяет формировать объемное изображение исследуемых объектов с высокой (достигающих единиц сантиметров) точностью, определять до них расстояние (в том числе и при расположении их в грунте), значительно повысить чувствительность за счет повышения соотношения сигнал/шум путем синфазного суммирования мощностей зондирующих сигналов каждой передающей антенны, а при реализации устройства формирования радиолокационного изображения обеспечивается радиолокационное формирование объемного изображения объекта с высокой разрешающей способностью, при этом устройство является технологичным и может быть реализовано на стандартных микросхемах, а следовательно, относительно недорогим. Кроме того, устройство обеспечивает формирование объемного изображения объекта и измерение дальности до него в абсолютных единицах (метрах), что также подтверждает эффективность технического решения. 2 с. и 2 з.п. ф-лы, 3 ил.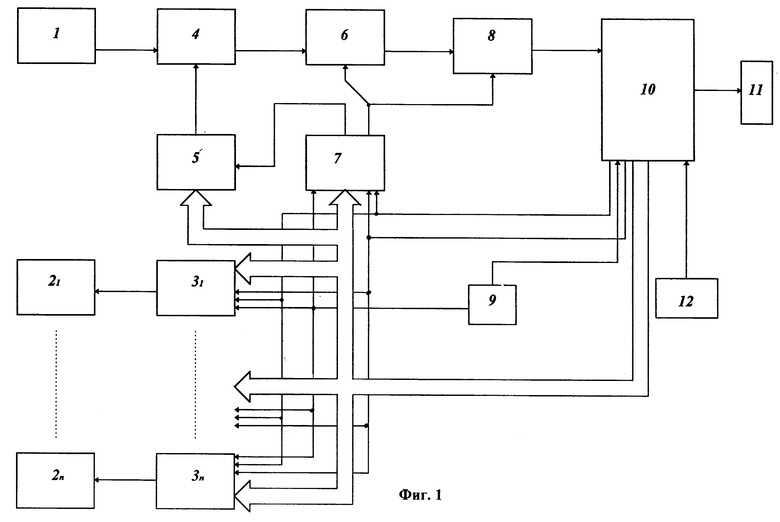
| Зарубежная радиоэлектроника, 1991, N 1, с.208 | |||
| OSUMI | |||
| N., UENO K | |||
| - IN: PROC | |||
| INT: SYMP | |||
| ON NOISE AND CLUTTER REJIN | |||
| RADARS AND IMAG | |||
| SENS., TOKYO, 1984 | |||
| US 1538710 A1, 20.05.96 | |||
| Способ радиолокационного зондирования подвижных объектов дискретными сигналами | 1990 |
|
SU1800415A1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 1997 |
|
RU2121671C1 |
| US 5384573 A, 24.01.95 | |||
| US 5557283 A, 17.09.96 | |||
| DE 3215897 A, 10.11.83 | |||
| EP 0395015 A2, 31.10.90 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |

