I. Область Техники
Настоящее изобретение относится к радиосвязи, и в частности - к приему сигнала.
II. Уровень Техники
Радиоприемник может принимать сигнал, прошедший несколько различных путей распространения, созданных характеристиками многолучевого распространения канала передачи. Одной из характеристик канала с многолучевым распространением является разброс во времени, вводимый в сигнал, передаваемый по каналу. Например, если идеальный радиоимпульс передается по каналу с многолучевым распространением, то принимаемый сигнал выглядит как поток импульсов. Еще одна характеристика канала с многолучевым распространением заключается в том, что каждая траектория в канале может обусловливать разный коэффициент затухания. Например, если идеальный радиоимпульс передается по каналу с многолучевым распространением, то каждый импульс принимаемого потока импульсов, как правило, имеет уровень сигнала, отличающийся от других принимаемых импульсов. Еще одна характеристика канала с многолучевым распространением состоит в том, что каждая траектория в канале может обусловливать разную фазу сигнала. Например, если идеальный радиоимпульс передается по каналу с многолучевым распространением, то каждый импульс принимаемого потока импульсов, как правило, имеет фазу, отличающуюся от других принимаемых сигналов.
В канале мобильной радиосвязи сотовой системы многолучевое распространение может создаваться отражениями сигнала от таких препятствий окружающей среды, как здания, деревья, автомобили и люди. Как правило, канал мобильной радиосвязи является изменяемым во времени каналом многолучевого распространения по причине относительного перемещения структур, создающих многолучевое распространение. Например, если идеальный радиоимпульс передается по изменяющемуся во времени каналу с многолучевым распространением, то принимаемый поток импульсов будет изменяться по местоположению, времени, затуханию и фазе в зависимости от времени, когда данный идеальный радиоимпульс был передан.
Характеристика многолучевого распространения канала может вызвать замирание сигнала. Замирание является результатом характеристик фазирования канала с многолучевым распространением. Замирание происходит, когда векторы многолучевого распространения суммируются деструктивно - дают принимаемый сигнал, который слабее любого отдельного вектора. Например, если гармоническая волна передается по каналу с многолучевым распространением, имеющему две траектории, где первая траектория имеет коэффициент затухания Х дБ, задержку во времени δ и фазовый сдвиг на θ радиан, и вторая траектория имеет коэффициент затухания Х дБ, задержку во времени δ и фазовый сдвиг на θ+π радиан, то на выходе канала сигнал не будет принят.
В сотовой телефонной системе многостанционного доступа с кодовым разделением каналов (CDMA, МСДКРК) используется общая полоса частот, обеспечивая возможность одновременной связи между мобильной станцией (например, сотовым телефоном, радиостанцией местной замкнутой системы или радиомодемом) и более чем одной базовой станцией. Сигналы, занимающие общую полосу частот, различаются принимающей станцией по свойствам сигнала МСДКРК с расширенным спектром с помощью высокоскоростного псевдошумового (ПШ) кода. ПШ-код используется для модулирования сигналов, передаваемых между базовыми станциями и мобильными станциями. Передающие станции, использующие разные ПШ-коды или один и тот же ПШ-код, смещенный во времени, формируют сигналы, различаемые принимающей станцией. ПШ-модуляция также позволяет принимающей станции принимать сигнал от одной передающей станции, когда сигнал прошел несколько разных траекторий.
В узкополосных системах модуляции, такой как аналоговая частотная модуляция, используемая обычными радиотелефонными системами, наличие каналов с многолучевым распространением в радиоканале может привести к значительному замиранию при многолучевом распространении. Но в широкополосной МСДКРК-системе экземпляры передаваемого сигнала, принимаемые по разным траекториям, можно отличать друг от друга в процессе демодуляции. Эта избирательность не только значительно уменьшает замирание при многолучевом распространении, но также обеспечивает преимущество для МСДКРК-системы.
Последствия замирания можно в некоторой мере устранить путем регулирования мощности передатчика в системе МСДКРК. Система регулирования мощности базовой станции и мобильной станции раскрывается в патенте США №5056109 на «Method and apparatus for controlling transmission power in a CDMA cellular mobile telephone system» от 08 октября 1991 г., переуступленном правопреемнику данного изобретения. Помимо этого, последствие замирания, обусловленного многолучевым распространением, можно уменьшить за счет осуществления связи с несколькими базовыми станциями с помощью технологии «мягкой передачи обслуживания». Технология «мягкой передачи обслуживания» описывается в патенте США №5101501 на «Soft handoff in a CDMA cellular telephone system» от 08 октября 1991 г., переуступленном правопреемнику настоящего изобретения.
Наличие многолучевого распространения может обеспечить разнесение траекторий для широкополосной системы расширенного спектра. Система с расширением спектра формирует информационный сигнал с расширенным спектром модулирования информационного сигнала с помощью псевдошумового (ПШ) кода. Как правило, ПШ-код в несколько раз превышает скорость передачи информационного сигнала. Скорость, с которой формируется ПШ-код, называется частотой следования элементарных посылок сигнала, и продолжительность одного разряда данных ПШ-кода называется временем элементарного сигнала. Если имеются две или более траектории с разностью задержки на трассе распространения свыше времени одного элементарного сигнала, то для раздельной демодуляции принимаемых по этим траекториям экземпляров сигналов можно использовать два или более обрабатывающих элементов (называемых элементами или отводами демодуляции). Эти сигналы обычно имеют независимое многолучевое замирание, т.е. они обычно вместе не замирают, и поэтому потеря сигнала происходит только в том случае, когда все демодулируемые виды сигнала замирают одновременно. Поэтому выходной сигнал двух или более элементов демодуляции можно объединить, чтобы получить разнесение траекторий. В идеальной системе и базовая, и мобильная станции используют множественные элементы демодуляции.
При перемещении мобильной станции в физической окружающей среде число и качество траекторий сигнала могут постоянно изменяться как при приеме на мобильной станции, так и на базовой станции. Поэтому приемник может использовать особый обрабатывающий элемент (называемый поисковым элементом), который непрерывно просматривает канал во временной области, чтобы определить наличие, смещение во временной области и уровень сигналов в условиях траектории с многолучевым распространением. Выходной сигнал поискового элемента обеспечивает информацию, которую можно использовать для обеспечения слежения за наиболее целесообразными траекториями.
В приводимой в качестве примера сотовой телефонной системе МСДКРК каждая базовая станция передает пилот-сигнал, используемый мобильными станциями для получения исходной системной синхронизации и для обеспечения робастного слежения по времени, частоте и фазе передаваемых сигналов базовой станции. Передаваемые разными базовыми станциями пилот-сигналы в системе могут использовать один и тот же ПШ-код; причем сигнал каждой базовой станции расширяют с помощью отличающегося от других кодового сдвига фазы (т.е. ПШ-коды, передаваемые соседними базовыми станциями, одинаковы, но смещены во времени относительно друг друга). Этот кодовый сдвиг фазы позволяет отличать друг друга пилот-сигналы в соответствии с базовой станцией, из которой они переданы. Типичная конфигурация базовой станции может также включать в себя несколько секторов, каждый из которых содержит независимые передающие и приемные антенны и имеет свой собственный ПШ-код или кодовое смещение. Когда мобильная станция находится в неактивном режиме без вызовов, ее поисковый элемент может продолжать просмотр принимаемого сигнала при кодовых смещениях, соответствующих передаваемым пилот-сигналам ближних базовых станций. При инициировании вызова адрес ПШ-кода определяется для использования во время этого вызова. Адрес кода может быть либо предоставлен базовой станцией, либо заранее определен на основании идентификационной информации мобильной станции. После инициирования вызова поисковый элемент мобильной станции продолжает просматривать (сканировать) пилот-сигналы, передаваемые соседними базовыми станциями, и мобильная станция может осуществлять связь с несколькими базовыми станциями одновременно.
Объединение разнесения в мобильной станции существенно повышает качество и надежность связи в сотовой телефонной системе. Разнесение использует случайный характер распространения радиоволн путем нахождения независимых (или по меньшей мере в значительной степени некоррелированных) траекторий сигнала для осуществления связи. Если траектория радиоволны претерпевает значительное замирание, то приемник берет другую независимую траекторию с более сильным сигналом. При наличии для выбора нескольких траекторий можно улучшить отношение сигнал-шум в приемнике. Для улучшения определения отношения сигнал-шум по каждой траектории можно использовать форму объединения с максимальным отношением. Затем каждую траекторию можно сложить с вкладами от других траекторий, взвешенных согласно отношению сигнал-шум. Объединение может быть когерентным, поскольку демодуляция пилот-сигнала позволяет определить фазу каждой траектории.
Ниже приводится описание трехэтапного способа для назначения множественных элементов демодуляции в мобильной станции системы с расширением спектра. Это описание также дано в патенте США №5490165 («патент-165») от 06 февраля 1996 г, переуступленном правопреемнику данного изобретения. На первом этапе: поисковый элемент в мобильной станции делает обзор - просматривает (сканирует) интервал смещений во времени вблизи номинального времени прихода каждого сигнала каждой базовой станции, с которой установлена активная связь. Каждый обзор дает перечень траекторий обзора, в котором указаны уровни, смещения во времени пилот-сигнала и соответствующее смещение пилот-сигнала базовой станции. Поисковый элемент передает информацию в контроллер, который пытается согласовать смещение во времени каждой траектории обзора со смещением во времени траекторий, в данное время демодулируемых элементами демодуляции. Если множественные траектории демодуляции согласуются с одной траекторией обзора, то назначенным для этой траектории остается только элемент демодуляции, имеющий наибольшее показание уровня сигнала, а прочие элементы, назначенные данной траектории обзора, обозначаются как «свободные». Если демодулируемая в данное время траектория не соответствует какой-либо траектории обзора, то в перечень траекторий обзора вносится позиция о траектории обзора на основании информации о траектории демодуляции.
На втором этапе: контроллер проверяет траектории обзора в порядке уменьшения уровня сигнала (т.е. рассматривается первой траектория обзора, имеющая наибольший уровень сигнала). Если для рассматриваемой траектории обзора элемент демодуляции не назначен для какой-либо траектории в соответствующем секторе, то контроллер делает попытку назначить элемент демодуляции для данной траектории обзора в соответствии со следующей процедурой. Если какие-либо элементы демодуляции в данное время не являются назначенными или охарактеризованы как «свободные», то один из этих элементов демодуляции назначается для траектории обзора. Если таковой элемент демодуляции не найден, то для данной траектории обзора повторно назначается элемент демодуляции, имеющий траекторию с самым слабым сигналом, которая не является единственной траекторией демодуляции сектора его базовой станции. Если какой-либо элемент демодуляции не найден, то элемент демодуляции, назначенный траектории с самым слабым сигналом, повторно назначается для данной траектории обзора, если уровень сигнала траектории обзора по меньшей мере на 3 дБ сильнее уровня сигнала траектории с самым слабым сигналом демодуляции. Этот процесс продолжается, пока не произойдет повторное назначение, или пока весь перечень траекторий обзора не будет пройден без повторных назначений.
На третьем этапе: если на втором этапе повторные назначения не произошли, то контроллер снова просматривает траектории обзора в порядке уменьшения уровня сигнала. Если для траектории обзора элемент демодуляции не назначен, то контроллер может назначить этой траектории не назначенный или свободный элемент демодуляции. Если таковой элемент демодуляции не найден, то контроллер может повторно назначить для данной траектории элемент демодуляции, который назначен тому же сектору базовой станции, что и траектории обзора, если данная траектория обзора имеет сигнал на 3 дБ сильнее сигнала текущей траектории демодуляции. Альтернативно, контроллер может повторно назначить элемент демодуляции с самым слабым сигналом, который назначается сектору базовой станции, имеющей два или более назначенных элемента демодуляции, если данная траектория обзора имеет сигнал сильнее сигнала данной траектории демодуляции более чем на 3 дБ. Если происходит повторное назначение или если данной процедуре не удается снова назначить элемент демодуляции для рассматриваемой траектории обзора, то способ начинается снова.
Изложенный выше способ повторного назначения может потребовать два прохода по перечню траекторий, чтобы получить нужный уровень разнесения. Желательно получить повторное назначение элементов слежения (например, элементов демодуляции), которое достигает нужного уровня разнесения, но для которого не требуется двух проходов по перечню траекторий. Например, может быть желательным повторное назначение элементов слежения, которое достигает желательного уровня разнесения траектории, и также желательный уровень разнесения по секторам или ячейкам, но для которого не требуется двух проходов по перечню траекторий.
Сущность изобретения
Варианты осуществления настоящего изобретения обеспечивают способ назначения элементов слежения, включая сортировку перечня потенциальных назначений (например, экземпляров сигнала в принимаемом сигнале) согласно критерию разнесения. В некоторых осуществлениях перечень экземпляров сигнала сначала сортируется по измерениям энергии, затем - снова согласно критерию разнесения, например заданному уровню разнесения по ячейкам. В этих осуществлениях порядок по меньшей мере части сортированного перечня может быть изменен в пользу критерия разнесения. Например, перечень можно сортировать таким образом, что каждое из числа первых n потенциальных назначений в перечне соответствует разному источнику. Особенность дополнительных осуществлений данного изобретения заключается в том, что элемент слежения, который выводит демодулированные символы, будучи в синхронизированном состоянии, может быть обозначен как имеющийся для назначения, находясь в синхронизированном состоянии.
Прочие варианты осуществления настоящего изобретения обеспечивают каскад слежения в мобильной станции, который содержит поисковый элемент, группу элементов слежения и контроллер. Контроллер сортирует перечень потенциальных назначений, составленных (по меньшей мере первоначально) поисковым элементом, согласно критерию разнесения, и изменяет текущее назначение по меньшей мере одного из элементов слежения согласно сортированному перечню.
Другие варианты осуществления настоящего изобретения обеспечивают носитель данных (например, магнитный или оптический диск, или иную запись, получение оттиска или фиксирование; полупроводниковое или ферромагнитное устройство, например, запоминающее устройство или интегральная схема; распечатка кодов), имеющий машиночитаемый код, содержащий команды, выполняемые матрицей логических элементов; при этом команды обеспечивают способ назначения элементов слежения, включая сортировку перечня потенциальных назначений в соответствии с критерием разнесения.
Перечень чертежей
Фиг.1 - блок-схема алгоритма способа согласно осуществлению изобретения.
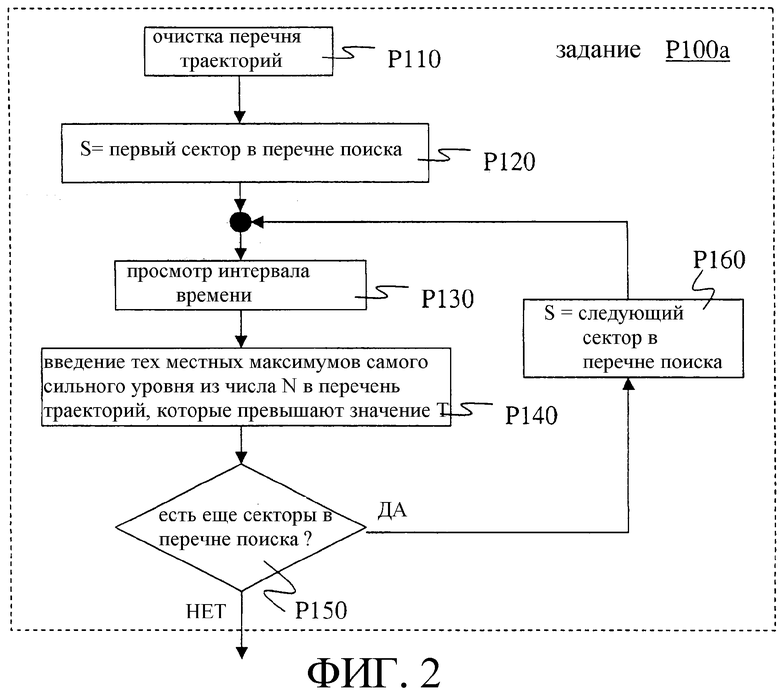
Фиг.2 - блок-схема последовательности операций осуществления Р100а задания Р100.
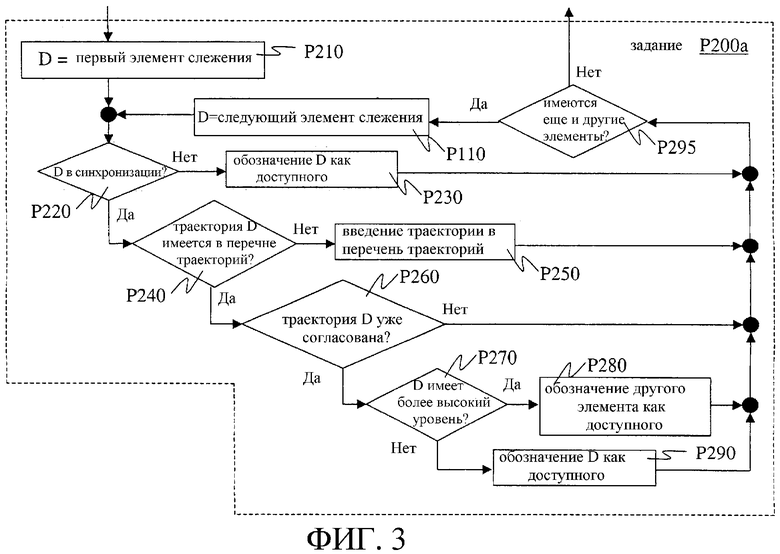
Фиг.3 - блок-схема последовательности операций осуществления Р200а задания Р200.
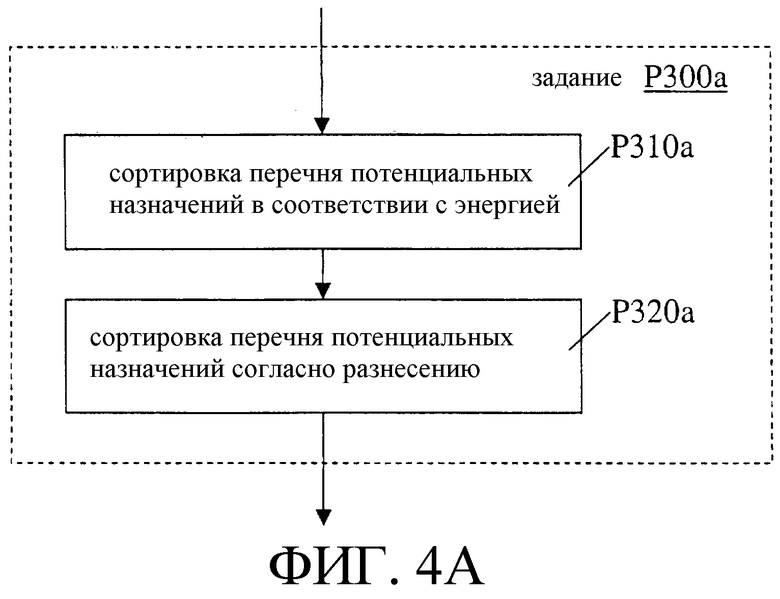
Фиг.4А - блок-схема последовательности операций осуществления Р300а задания Р300.
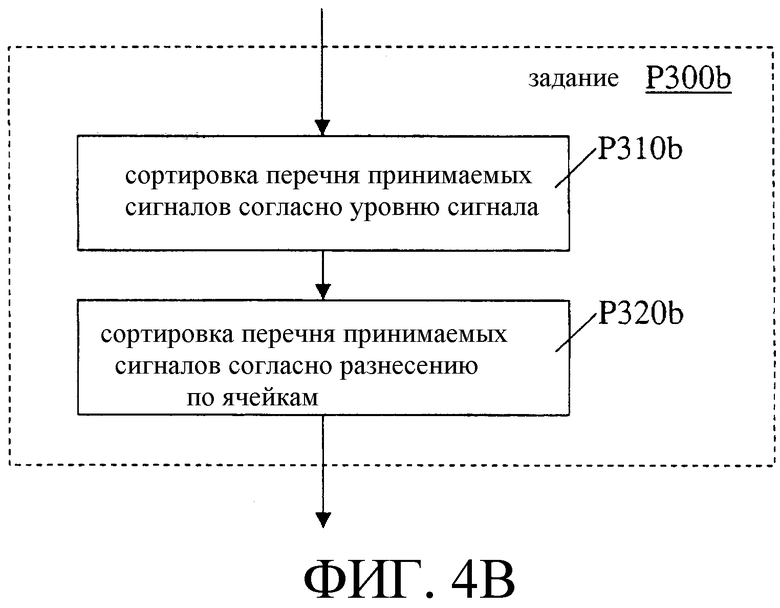
Фиг.4В - блок-схема последовательности операций осуществления Р300b задания Р300.
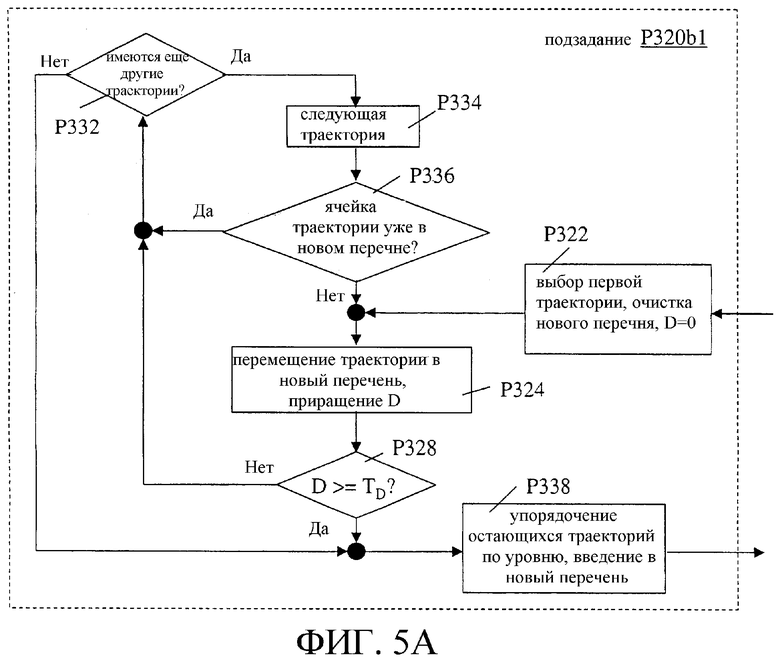
Фиг.5А - блок-схема последовательности операций осуществления Р320b1 подзадания Р320b.
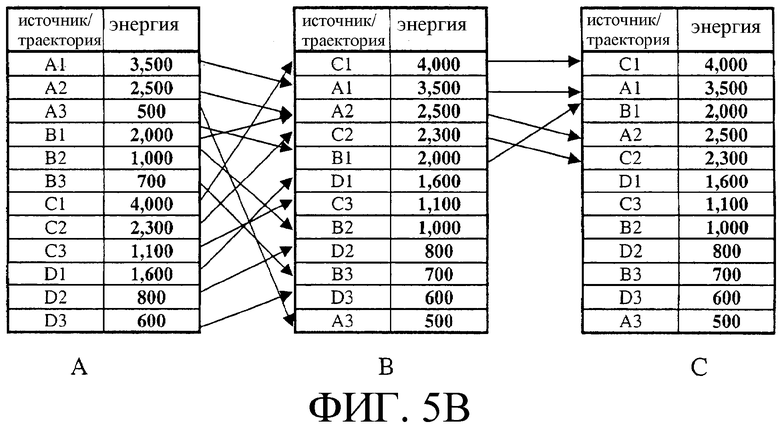
Фиг.5В иллюстрирует ход операции сортировки, которую может выполнить подзадание Р320b1.
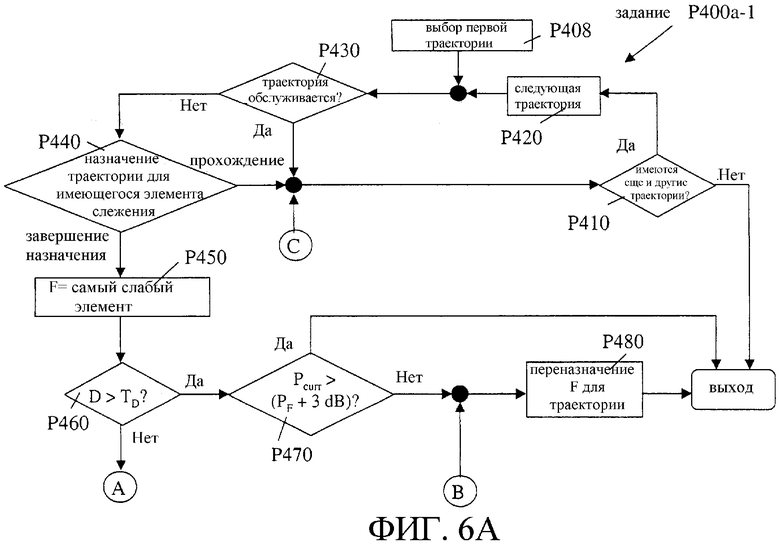
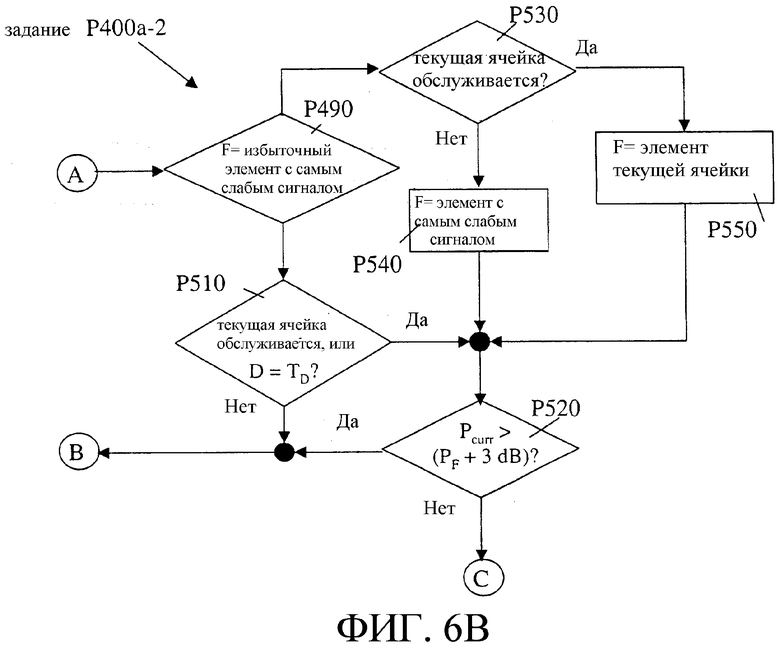
Фиг.6А и 6В - блок-схема алгоритма осуществления Р400а задания Р400.
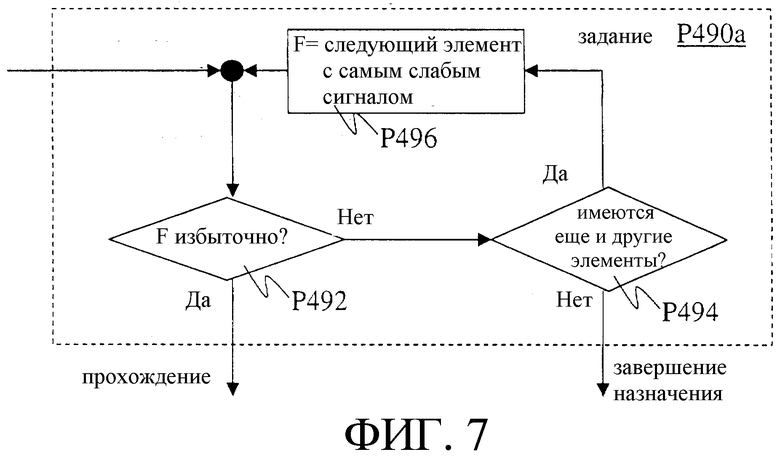
Фиг.7 - блок-схема алгоритма осуществления Р490а задания Р490.
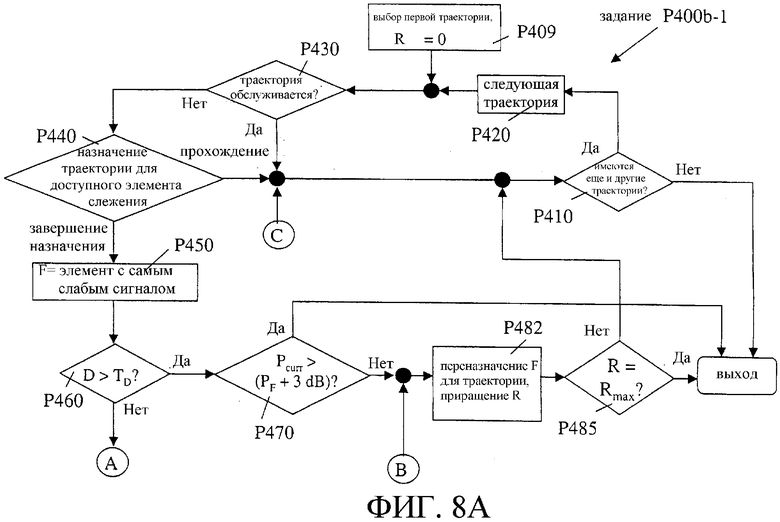
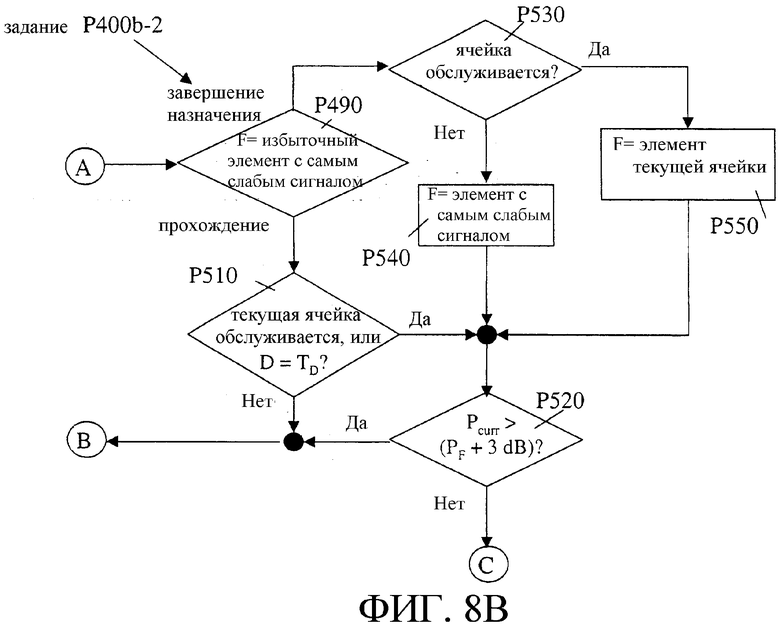
Фиг.8А и 8В - блок-схема алгоритма осуществления Р400b задания Р400.
Фиг.9 - блок-схема последовательности операций способа согласно осуществлению изобретения.
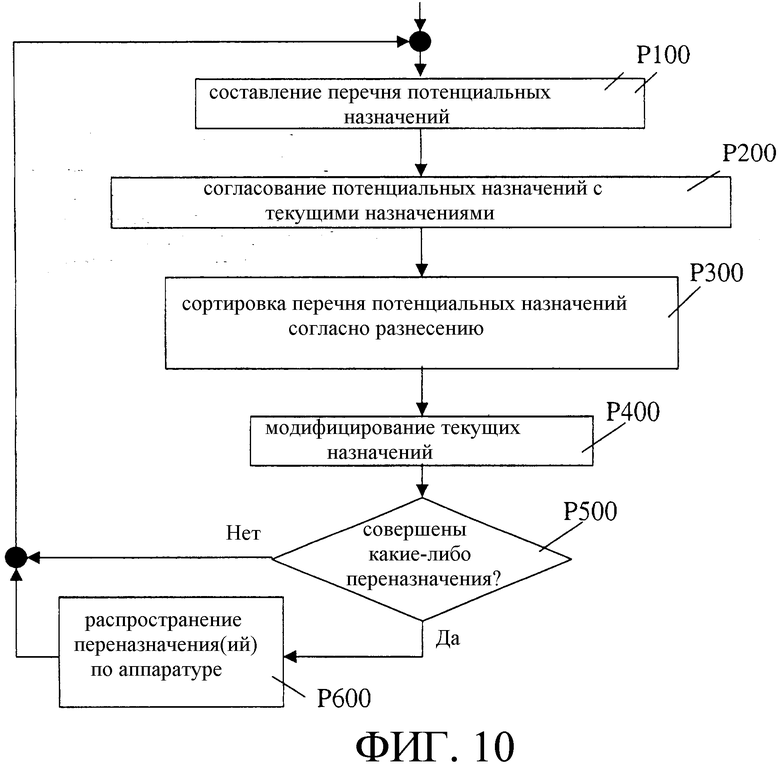
Фиг.10 - блок-схема операций способа согласно осуществлению изобретения.
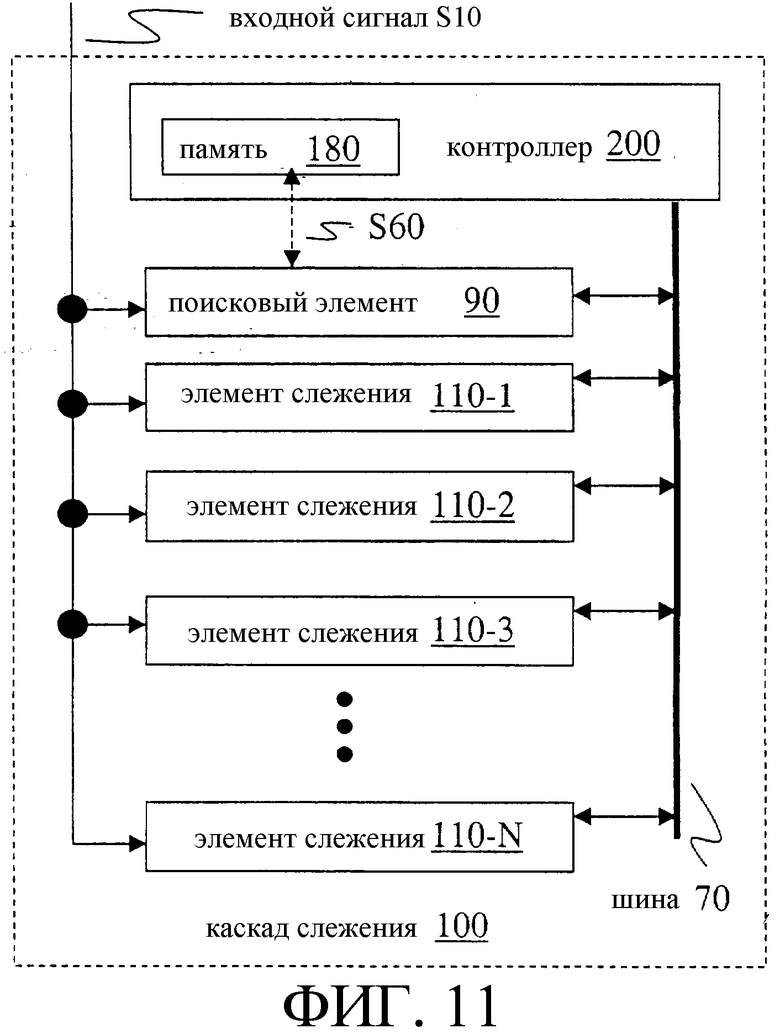
Фиг.11 - блок-схема каскада 100 слежения согласно осуществлению изобретения.
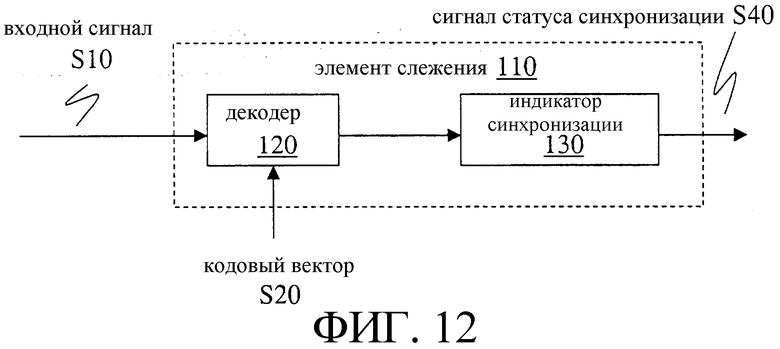
Фиг.12 - блок-схема элемента 100 слежения.
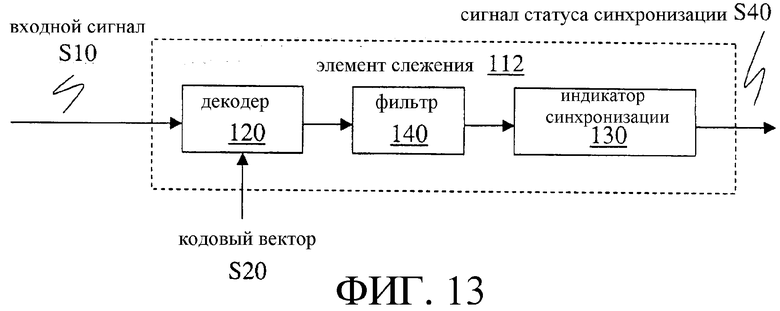
Фиг.13 - блок-схема элемента 112 слежения.
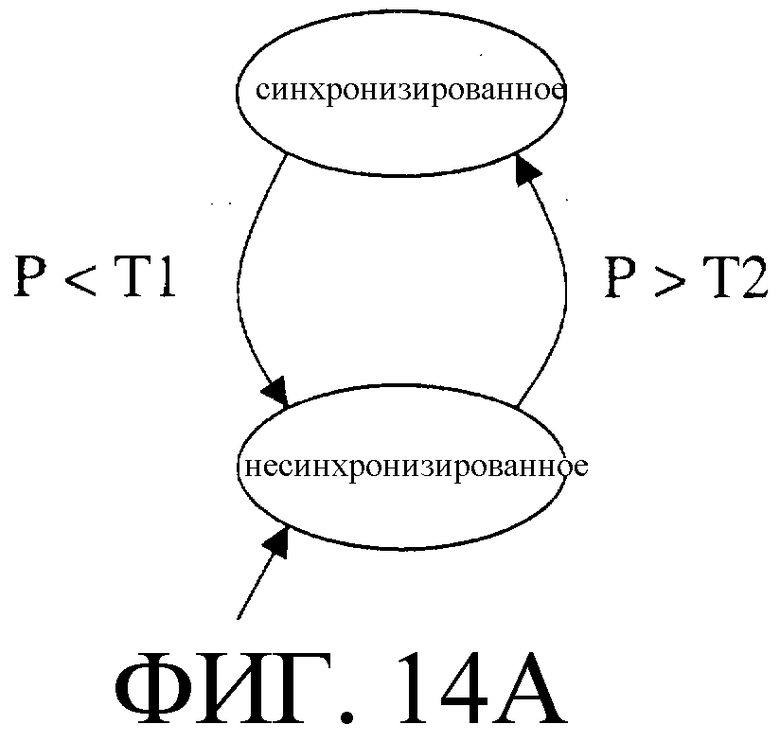
Фиг.14А - диаграмма состояний схемы для установления статуса синхронизации элемента слежения.
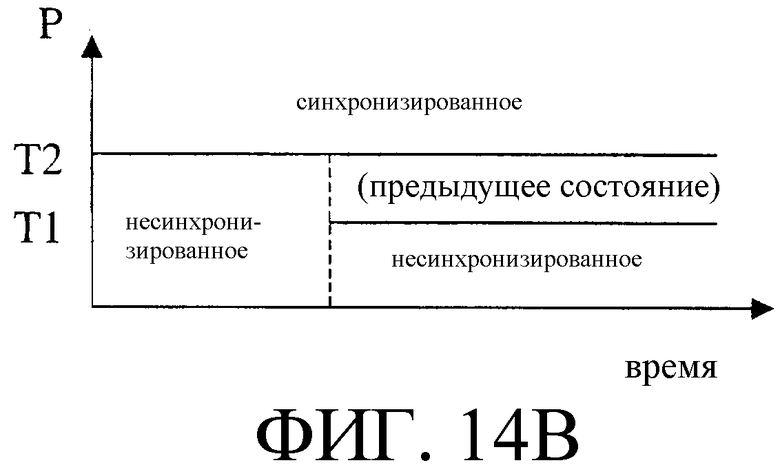
Фиг.14В - представление схемы, показанной на Фиг.14А, в виде графика зависимости уровня сигнала от времени.
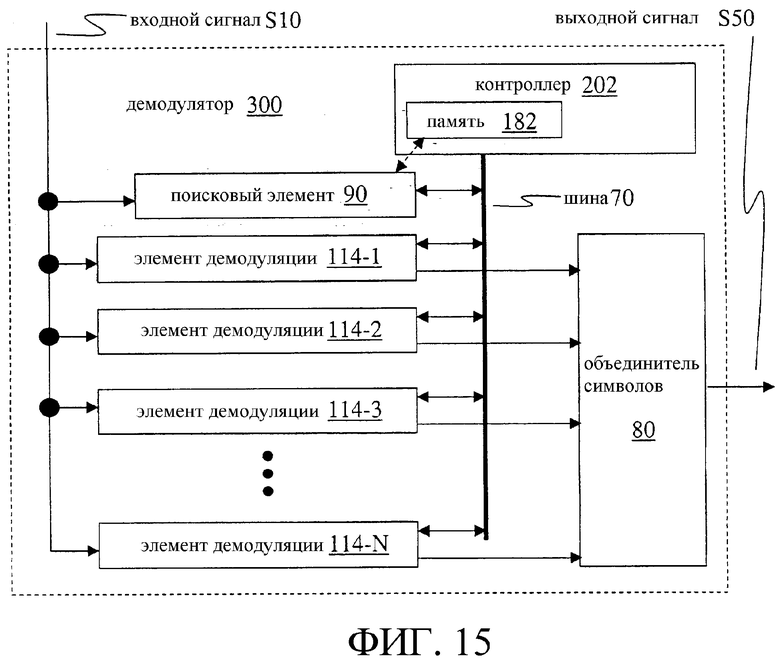
Фиг.15 - блок-схема демодулятора 300 согласно осуществлению изобретения.
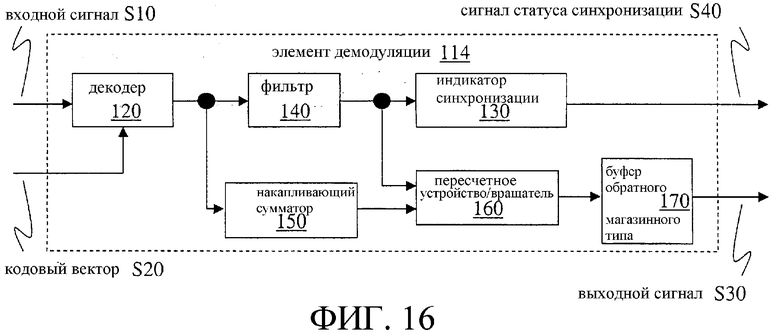
Фиг.16 - блок-схема элемента 114 демодуляции.
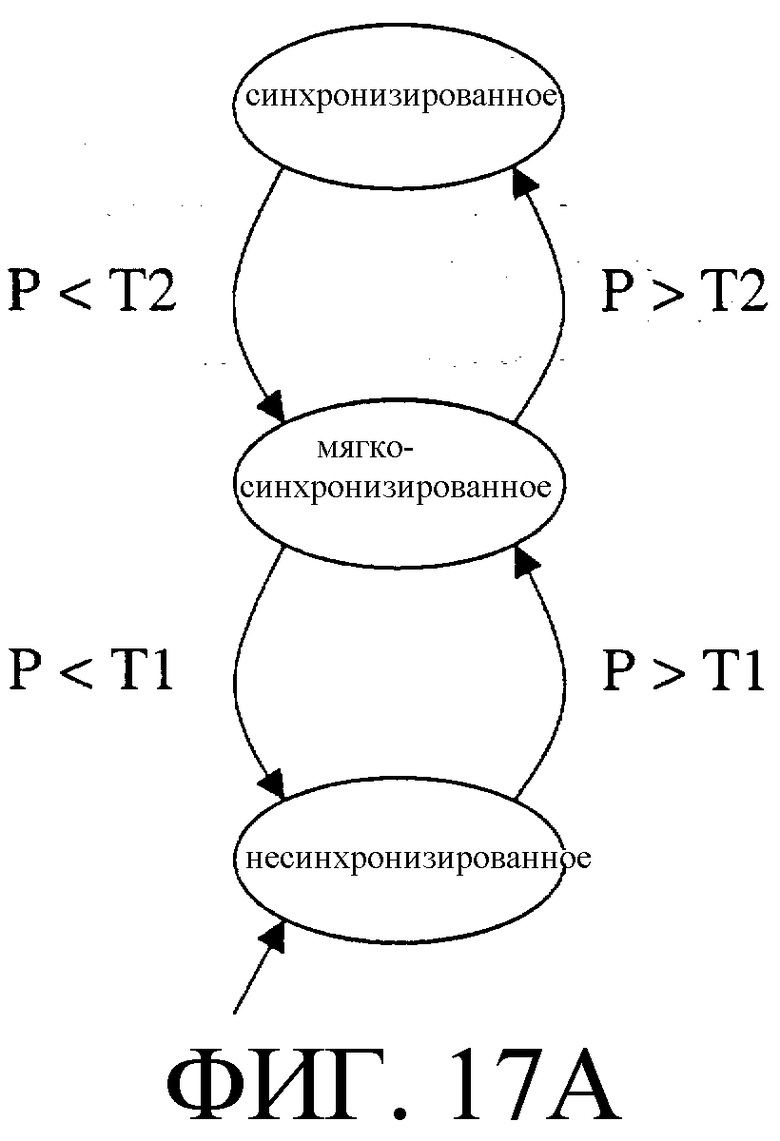
Фиг.17А - диаграмма состояний схемы для установления статуса синхронизации элемента демодуляции.
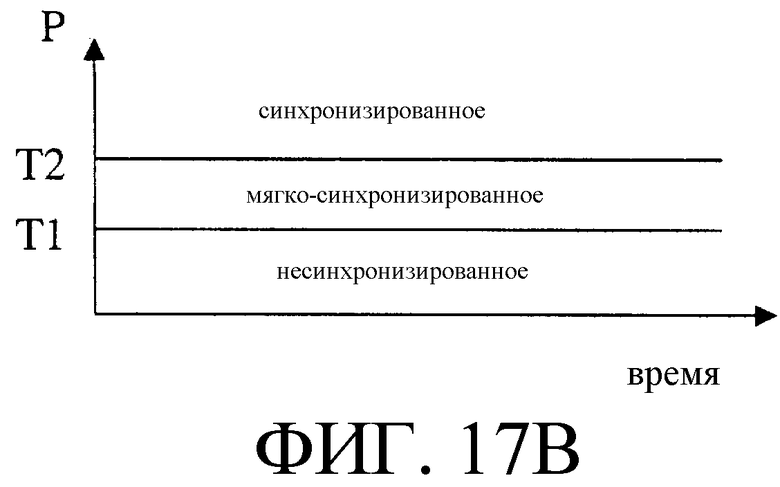
Фиг.17В - представление схемы, показанной на Фиг.17А, в виде графика зависимости уровня сигнала от времени.
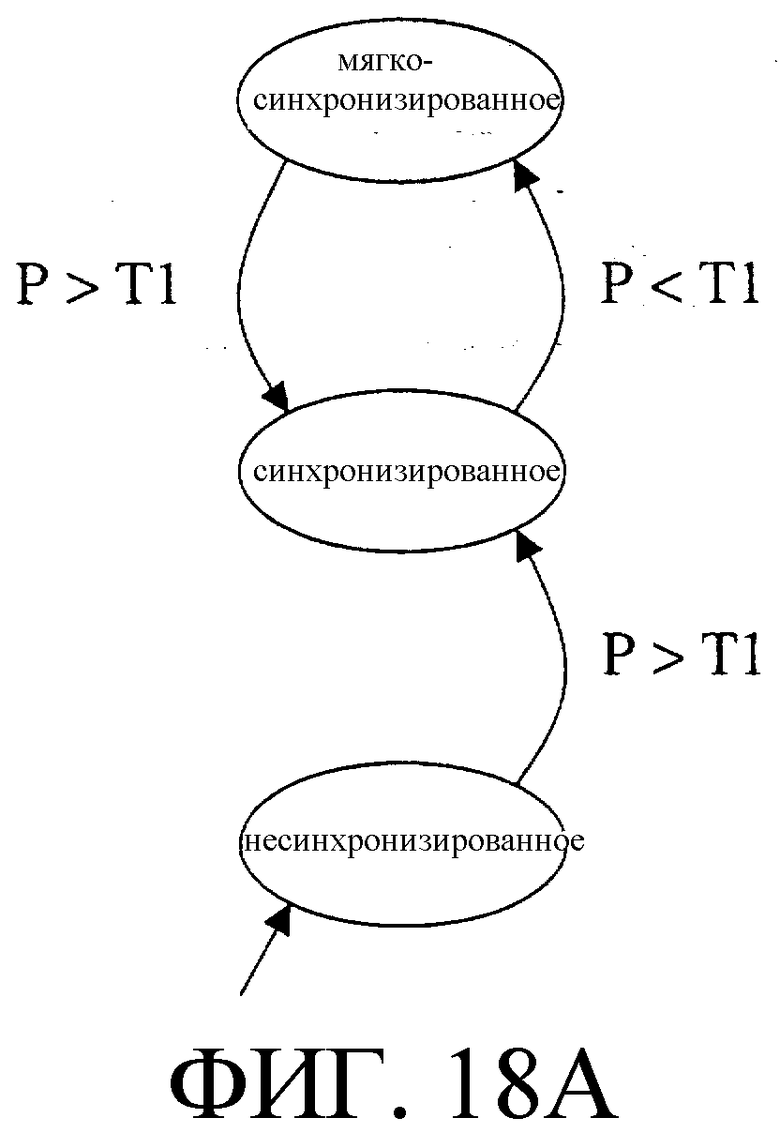
Фиг.18А - диаграмма состояний схемы для установления статуса синхронизации элемента демодуляции.
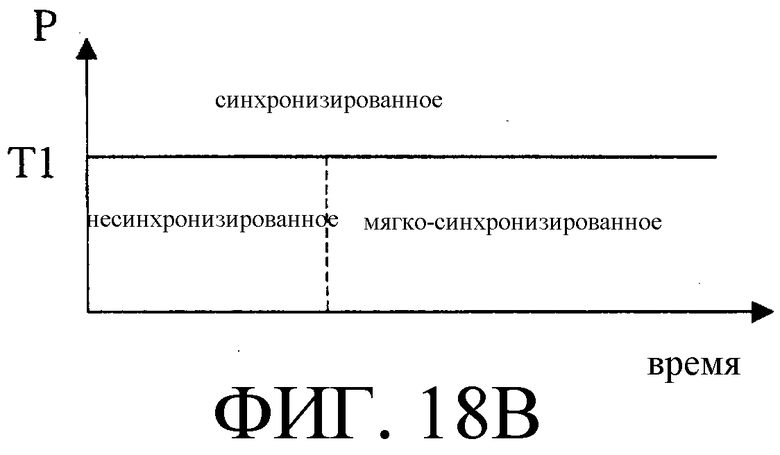
Фиг.18В - представление схемы, показанной на Фиг.18А, в виде графика зависимости уровня сигнала от времени.
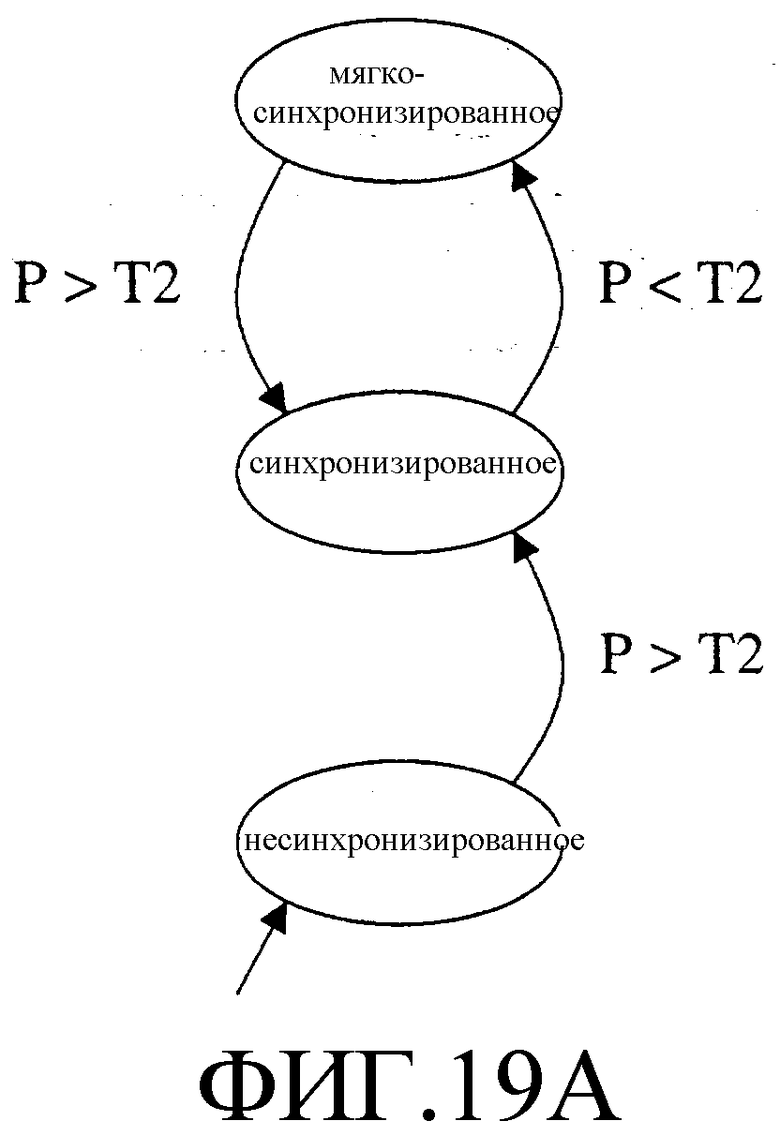
Фиг.19А - диаграмма состояний схемы для установления статуса синхронизации элемента демодуляции.
Фиг.19В - представление схемы, показанной на Фиг.19А, в виде графика зависимости уровня сигнала от времени.
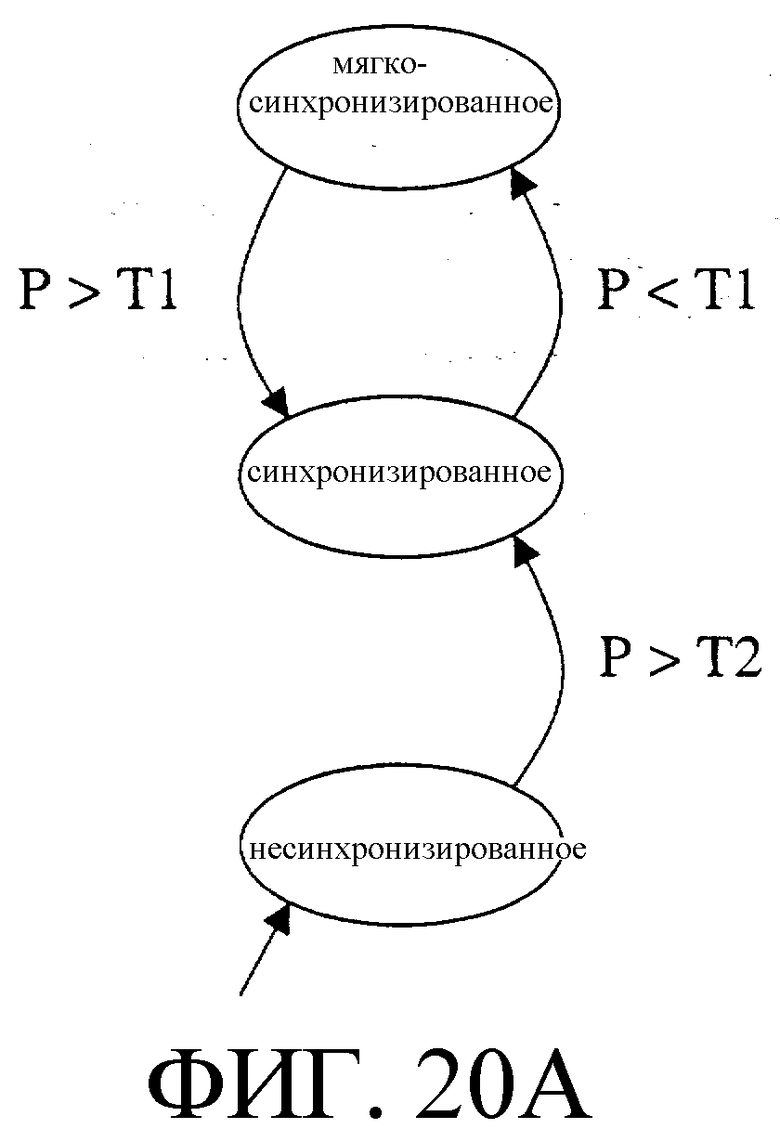
Фиг.20А - диаграмма состояний схемы для установления статуса синхронизации элемента демодуляции.
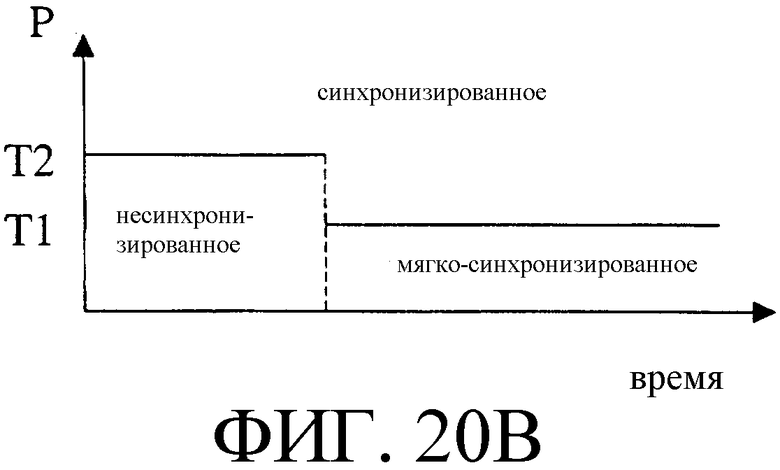
Фиг.20В - представление схемы, показанной на Фиг.20А, в виде графика зависимости уровня сигнала от времени.
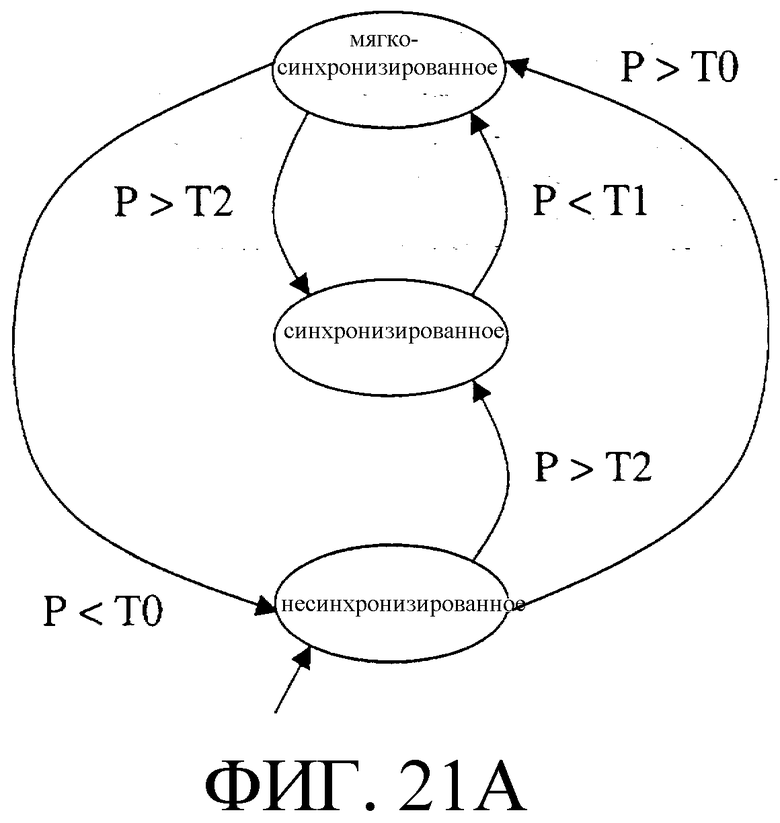
Фиг.21А - диаграмма состояний схемы для установления статуса синхронизации элемента демодуляции.
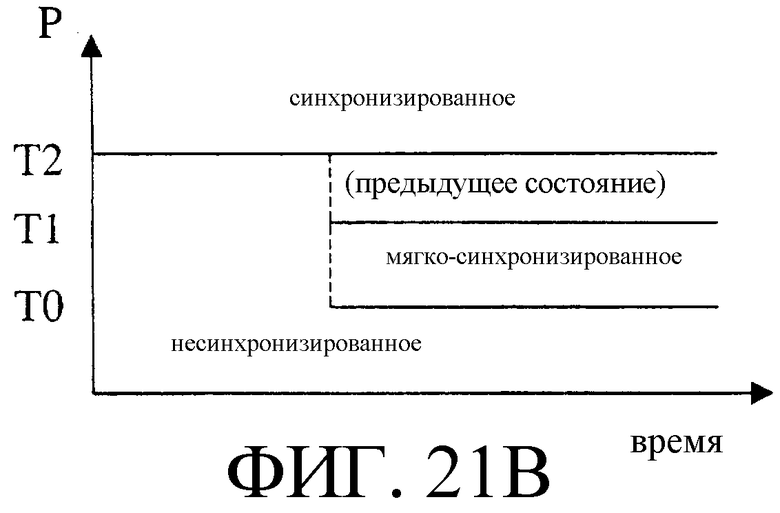
Фиг.21В - представление схемы, показанной на Фиг.21А, в виде графика зависимости уровня сигнала от времени.
Сведения, подтверждающие возможность осуществления изобретения
В данном описании термины «элемент демодуляции» и «отвод» используются взаимозаменяемо в качестве отдельных примеров элемента слежения. Кроме того, фраза «приводимый в качестве примера» здесь используется исключительно в значении «служащий примером, иллюстрацией»; и указываемое здесь как «приводимое в качестве примера» любое осуществление необязательно нужно истолковывать как осуществление предпочтительное или преимущественное по сравнению с другими осуществлениями.
Регулирование мощности мобильной станции имеет важное значение для всей работы МСДКРК-системы. Базовая станция в этой системе передает автономную команду регулирования мощности в каждую мобильную станцию, с которой она осуществляет связь. Для обеспечения максимально возможной пропускной способности системы каждая мобильная станция должна понизить свою мощность передачи, если какая-либо базовая станция дает на то команду, даже если другие базовые станции дают команду повысить их мощность передачи. Поэтому для мобильной станции желательно осуществлять связь с несколькими базовыми станциями (т.е. осуществлять связь по меньшей мере с минимальным уровнем разнесения по ячейкам), чтобы она смогла принимать команды регулирования мощности из нескольких источников.
Фиг.1 показывает блок-схему операций способа назначения элементов слежения согласно варианту осуществления настоящего изобретения. Задание Р100 составления составляет перечень потенциальных (возможных) назначений. Например, задание Р100 может составить перечень траекторий обзора, при этом каждая запись в перечне указывает смещение во времени и соответствующее измерение уровня сигнала в виде сигнала, принимаемого по данной траектории. Этот перечень может включать в себя экземпляры сигналов, передаваемых несколькими секторами одной базовой станции и/или несколькими разными базовыми станциями (или «ячейками»); и каждая запись в перечне может также указывать, какой именно сектор и/или ячейка передали соответствующий сигнал.
Фиг.2 иллюстрирует блок-схему последовательности операций приводимого в качестве примера реализации Р100а задания Р100. Подзадание Р110 установки в исходное состояние сбрасывает перечень траекторий обзора (например, удаляется перечень траекторий, найденных во время предыдущего выполнения задания Р100а). Подзадание Р120 инициализации устанавливает текущий сектор S поиска в качестве первого сектора базовой станции в перечне поиска. В приводимых в качестве примера осуществлениях перечнем поиска может быть Активный набор, набор Кандидатов или набор Соседей мобильной станции [эти наборы определены в Разделе 1 описания стандарта IS-95B CDMA для сотовой телефонной связи, опубликованного Ассоциацией Промышленности Электросвязи, Арлингтон, Вирджиния]. Согласно еще одному осуществлению: задание Р100а может выполняться для каждой ячейки, а не для каждого сектора.
Подзадание Р130 поиска просматривает временной интервал для обнаружения экземпляров сигнала и идентифицирует наиболее сильные местные максимумы N. Временной интервал можно выбрать по ожидаемому времени поступления сигнала, передаваемого из сектора S; это время поступления может быть указано сигналом, принимаемого от другой базовой станции или сектора, и/или экземплярами сигнала, принимаемым от сектора S в наиболее последних циклах. В приводимом в качестве примера осуществлении параметр N имеет значение трех, хотя исходя из таких частностей осуществления, как имеющийся для данного перечня траекторий объем памяти, количество имеющихся поисковых и/или следящих элементов и выделенного времени, можно выбрать любое другое значение целого числа.
В одном случае подзадание Р130 поиска производит поиск в принимаемом сигнале, дискретизированном согласно правилу «элемент сигнала ×2» (т.е. упорядоченная последовательность принимаемых выборок, временной интервал между которыми составляет 0,5 элемента сигнала). Если используется меньшая разрешающая способность выборки, то один принимаемый экземпляр сигнала может создать несколько различимых пиков. В этой системе подзадание Р130 может комбинировать различимые пики (например, с помощью взвешенного усреднения) в один местный максимум.
Подзадание Р140 выбора добавляет информацию каждого из N максимумов, который превышает минимальное пороговое значение Т уровня сигнала, в перечень траекторий обзора. Если в перечне поиска остается больше секторов, то подзадание Р150 проверки направляет способ в подзадание Р160 с циклом, которое выбирает следующий рассматриваемый сектор и возвращает управление к подзаданию Р130 поиска. Если в перечне поиска секторов больше не остается, то задание Р100а завершается.
Задание Р200 согласует по меньшей мере некоторые потенциальные назначения с текущими назначениями набора элементов слежения. Фиг.3 иллюстрирует блок-схему операций приводимого в качестве примера осуществления Р200а задания Р200. Подзадание Р210 инициализации устанавливает текущий элемент D слежения первым в наборе элементов слежения. Подзадание Р220 проверки проверяет статус синхронизации элемента D слежения. Если элемент D слежения несинхронизирован, то подзадание Р230 отмены назначения обозначает его как доступный для назначения.
Если элемент D слежения в данное время синхронизирован, то подзадание Р240 проверки определяет, есть ли траектория, за которой следит элемент D, в перечне траекторий обзора, составленном в задании Р100а. Например, подзадание Р240 может попытаться согласовать смещение во времени и/или передающий сектор, или ячейку траектории с одной из позиций перечня траекторий обзора.
Хотя каждая траектория слежения должна соответствовать по меньшей мере одной траектории обзора, все же иногда поисковый элемент может пропустить траекторию, за которой осуществляется слежение, и поэтому эта траектория не войдет в перечень траекторий обзора. В задании Р200а предполагается, что элемент слежения более точно, чем поисковый элемент, оценивает уровень сигнала и смещение во времени траектории. Поэтому, если подзадание Р240 определяет, что перечень траекторий обзора не содержит позиции, соответствующей траектории слежения элементом D, то подзадание Р250 составления добавляет в перечень траекторий обзора позицию, соответствующую данной траектории.
Если уже имеется траектория обзора, соответствующая траектории, отслеживаемой элементом D, то подзадание Р260 определяет, следит ли также за этой траекторией какой-либо другой уже рассмотренный элемент слежения. Если да, то по существу за одной и той же траекторией следят два элемента слежения. Это обстоятельство может возникать, когда две траектории со временем сходятся в одну траекторию или иным образом становятся неразличимыми. В этом случае подзадание Р270 определяет, какой именно элемент осуществляет слежение за более сильным сигналом, и подзадания Р280 и Р290 отмены назначения обозначают другой элемент как доступный для назначения. Если цикловое подзадание Р295 определяет, что еще остаются элементы слежения, то подзадание Р110 устанавливает текущий элемент D слежения в качестве следующего элемента слежения, и задание Р200а продолжается на подзадании Р220. В ином случае задание Р200а завершается.
Задание Р300 сортировки сортирует перечень потенциальных назначений согласно критерию разнесения. Фиг.4А показывает приводимое в качестве примера осуществление Р300а задания Р300 сортировки. Подзадание Р310а сортирует перечень потенциальных назначений согласно измерению энергии. Эту операцию можно выполнить с помощью любого сортирующего алгоритма, подходящего для набора данных и осуществления (например, сортировка пузырьковым методом, пирамидальная сортировка, быстрая сортировка). Подзадание Р320 затем сортирует перечень потенциальных (возможных) назначений согласно критерию разнесения. Согласно другим осуществлениям подзадания Р310а и Р320а можно выполнить в обратном порядке, со взаимным наложением, или одновременно, или как одно задание.
Фиг.4В показывает еще одно приводимое в качестве примера осуществление Р300b задания Р300 сортировки. Подзадание Р310b сортирует перечень принимаемых экземпляров сигналов согласно измерению уровня сигнала. Например, подзадание Р310b может сортировать принимаемые сигналы в соответствии с энергией. Для сигнала, принимаемого как комплексный вектор, энергию сигнала можно выразить как модуль комплексного вектора (возможно, усредненного по такому заданному интервалу, как заданное число элементов сигнала или выборок). Затем подзадание Р320b сортирует перечень принимаемых экземпляров сигнала согласно критерию разнесения по ячейкам. В соответствии с еще одним осуществлением: подзадание Р320b может сортировать перечень принимаемых экземпляров сигнала согласно критерию такой дополнительной (или альтернативной) формы разнесения, как секторное разнесение (по секторам). В соответствии с еще одним осуществлением: подзадания Р310b и Р320b могут выполняться в обратном порядке, при взаимном наложении или одновременно, или как отдельное задание.
Фиг.5А показывает приводимое в качестве примера осуществление P320b1 подзадания P320b в случае, когда принимаемые экземпляры сигнала соответствуют разным траекториям одного или нескольких передаваемых сигналов. Согласно этому осуществлению новый перечень упорядочивают с уклоном в пользу необслуживаемых ячеек (т.е. ячеек, еще не представленных в новом перечне), пока не будет соблюдено заданное пороговое значение разнесения. Задание Р322 устанавливает текущую траекторию в качестве первой траектории перечня принимаемых экземпляров сигнала, уже сортированных согласно измерению значения уровня сигнала. Задание Р322 может также очистить новый перечень и инициализировать счетчик D разнесения по ячейкам. Задание Р324 перемещает (например, копирует) текущую траекторию в первую позицию нового перечня и осуществляет приращение счетчика D разнесения по ячейкам.
Задание Р328 сравнивает значение счетчика D разнесения по ячейкам с заданным пороговым значением TD разнесения. В приводимом в качестве примера осуществлении TD может иметь значение трех. Если пороговое значение еще не достигнуто, то задание Р332 определяет, содержит ли сортированный перечень еще и другие траектории. Если другие траектории еще остаются, то задание Р334 выбирает следующую траекторию в сортированном перечне. Задание Р336 определяет, представлена ли уже другой траекторией в новом перечне передающая ячейка, которая соответствует данной траектории. Если данная ячейка уже представлена, то задания Р332 и Р334 выбирают следующую траекторию. В ином случае задание Р324 перемещает траекторию в новый перечень.
Если еще других траекторий не остается, или если задание Р328 определяет, что пороговое значение разнесения достигнуто или превышено, то задание Р338 добавляет траектории, остающиеся в сортированном перечне (уже сортированном по энергии), к новому перечню. Получаемый таким образом новый перечень сортируется согласно и уровню сигнала, и разнесению по ячейкам. Сортировку по критерию разнесения по различным ячейкам или согласно критерию другого разнесения (например, разнесение по секторам) можно выполнить путем изменения задания Р336, чтобы определить, отличается ли текущая траектория или сигнал в другом смысле от траекторий в новом перечне; и, возможно, путем изменения порогового значения TD разнесения - согласно целесообразности.
Фиг.5В иллюстрирует ход операции сортировки, которую может выполнять подзадание Р320b1. Таблица А показывает перечень принимаемых экземпляров сигнала, идентифицированных по источнику А, В или С (например, ячейка или сектор), номеру траектории и энергии. В Таблице В представлен тот же перечень после сортировки по энергии; в таблице С - перечень после сортировки по энергии и разнесению. В этом примере перечень сортирован по разнесению, и поэтому первые три позиции соответствуют трем разным источникам.
Задание Р400 модифицирует одно или несколько текущих назначений элементов слежения согласно сортированному перечню потенциальных (возможных) назначений. Фиг.6А и 6В показывают блок-схему операций для выполнения Р400а задания 400, когда потенциальные назначения соответствуют экземплярам одного или нескольких переданных сигналов, принимаемых по разным траекториям. Подзадание Р408 выбирает первую траекторию входящего перечня (сортированного по уровню и разнесению сигнала, например, как изложено выше). Подзадание Р430 определяет, назначен ли для выбранной траектории какой-либо элемент слежения. Если для этой траектории элемент не назначен и элемент слежения обозначен как доступный, то подзадание Р440 назначает траекторию имеющемуся элементу; подзадание Р410 определяет, остаются ли еще и другие траектории; и подзадание Р420 выбирает следующую траекторию. Если таковой элемент не имеется, то подзадание Р450 устанавливает текущий элемент F в качестве элемента слежения, который назначен траектории с самым слабым сигналом.
Подзадание Р460 определяет, превышает ли текущее измерение разнесения D заданное пороговое значение TD. (Нужно отметить, что значения и/или меры разнесения, используемые в задании Р400, могут быть теми же, что и использованные в подзадании Р320, или отличаться от них.) Если пороговое значение превышено, то подзадание Р470 определяет, достаточно ли уровень текущей траектории превышает уровень траектории, назначенной элементу F, чтобы было правомерным повторное назначение. В этом конкретном примере подзадание Р470 определяет, превышает ли мощность сигнала текущей траектории мощность сигнала, назначенную элементу F, более чем в два раза.
Хотя подзадание Р470 может выполняться для проведения простого сравнения, эта установка может привести к пробуксовке (т.е. чрезмерному количеству повторных назначений) между двумя траекториями со схожим уровнем сигнала. Согласно другому осуществлению: соотношение, проверяемое в подзадании Р470, может быть динамическим, основанным на таких факторах, как недавняя активность по повторным назначениям. Если подзадание Р470 определяет, что сигнал текущей траектории не является достаточно сильным, то последующее переназначение не происходит, и задание Р400 завершается. В ином случае подзадание Р480 переназначает элемент F слежения для текущей траектории, и задание Р400а завершается.
Если текущая мера разнесения D не превышает заданного порогового значения TD разнесения, то подзадание Р490 (Фиг.6В) устанавливает текущий элемент F в качестве элемента слежения, который назначен для траектории с самым слабым сигналом из ячейки, которая обслуживается не одним элементом слежения. Иначе говоря, подзадание Р490 выбирает избыточный элемент F с самым слабым сигналом. Фиг.7 показывает блок-схему последовательности операций для приводимого в качестве примера осуществления Р490а подзадания Р490. Задание 492 определяет, является ли элемент F слежения избыточным (т.е. передается ли траектория, за которой он следит, какой-либо ячейкой, обслуживаемой еще одним элементом слежения). Если нет, и подзадание Р494 указывает, что остаются еще и другие элементы слежения, то подзадание Р496 устанавливает текущий элемент F в качестве следующего элемента слежения с самым слабым сигналом. Подзадание Р490а завершается, если обнаружен избыточный элемент (Pass), или когда больше элементов не остается (Fail).
Если обнаружен избыточный элемент слежения, то подзадание Р510 определяет, является ли справедливым по меньшей мере одно из двух следующих условий: (1) ячейку, соответствующую текущей траектории, уже обслуживает следящий элемент; либо (2) достигнуто пороговое значение TD. Если ни одно из этих условий не верно, то переназначение элемента F обеспечит коэффициент усиления приема при разнесении, и подзадание Р480 переназначает элемент F для текущей траектории. Если одно из этих условий выполняется, то подзадание Р520 определяет, достаточно ли уровень сигнала текущей траектории превышает уровень сигнала траектории, назначенной элементу F, чтобы переназначение было правомерным. Как указано выше в отношении подзадания Р470, проверяемую подзаданием Р520 взаимосвязь можно отрегулировать (возможно, динамически), чтобы достичь нужный компромисс между коэффициентом усиления мощности сигнала и чрезмерной активностью по переназначению. Если проверка согласно подзаданию Р520 дает ответ «нет», то подзадание Р410 определяет, остаются ли еще и другие траектории.
Если подзаданию Р490 не удается идентифицировать избыточный элемент слежения, то подзадание Р530 определяет, обслуживает ли уже какой-либо элемент слежения ячейку, соответствующую текущей траектории. Если ячейка обслуживается, то подзадание Р550 устанавливает текущий элемент F в качестве элемента слежения, обслуживающего текущую ячейку. Если данная ячейка не обслуживается, то подзадание Р540 устанавливает текущий элемент F в качестве элемента слежения, назначенного траектории с самым слабым сигналом. В обоих случаях подзадание Р520 определяет, есть ли достаточное превышение уровнем сигнала текущей траектории уровня сигнала траектории, назначенной элементу F, чтобы переназначение было правомерным. Согласно еще одному осуществлению: подзадание Р520 можно подразделить на два или более подзаданий, каждое из которых будет использовать разную взаимосвязь и управляться одним или несколькими подзаданиями Р510, Р540 и Р550.
Хотя переназначение может повысить отношение сигнал-шум путем перемещения элементов слежения в назначения с более сильным сигналом, все же затраты на переназначение могут перевешивать получаемую при этом выгоду. Всякий раз, когда элемент слежения назначается новому экземпляру сигнала, может потребоваться некоторое время для сброса старых данных и вхождения в синхронизм с новым экземпляром. Поэтому в течение конечного периода времени переназначенный элемент не дает действительные выходные данные. Требуемое для осуществления переназначения время можно увеличить для элементов слежения, которые также выполняют демодуляцию (например, согласно данному описанию). Если переназначенный элемент является единственным элементом, который осуществляет слежение за передаваемым сигналом, то это может привести к прерыванию приема. Помимо этого, если число переназначений не ограничено, то мобильная станция может избыточно реагировать на переходные условия, переназначая слишком много элементов и, возможно, теряя всякий контакт с сетью. Подзадание Р490а ограничивает число переназначений из расчета на один обзор.
Фиг.8А и 8В иллюстрируют блок-схему последовательности операций еще одного осуществления Р400b задания Р400, которое позволяет осуществить несколько переназначений за один обзор. В этом случае подзадание Р408 выбирает первую траекторию входящего перечня (сортированного по уровню сигнала и разнесению, например, согласно вышеизложенному) и также инициализирует счетчик R переназначения (например, равным нулю). Помимо переназначения текущего элемента F для текущей траектории - подзадание Р482 также осуществляет приращение счетчика R переназначений. Если подзадание Р485 проверки определяет, что пороговое значение Rmax переназначений достигнуто, то задание Р400b завершено.
Фиг.9 приводит блок-схему операций способа для назначения элементов слежения согласно еще одному осуществлению изобретения. По завершении задания Р400: способ возобновляет задание Р100, продолжая действовать на циклической основе.
Переназначения могут сообщаться элементам слежения при их осуществлении; альтернативно, переназначения для каждого цикла можно запоминать и посылать в конце цикла. Фиг.10 показывает блок-схему операций еще одного осуществления изобретения. Если задание Р500 проверки определяет, что переназначение элементов слежения произошло в задании Р400, то задание Р600 распространяет переназначения по элементам слежения. После выполнения задания Р500 или Р600 способ повторяется.
Фиг.11 иллюстрирует блок-схему каскада 100 слежения согласно осуществлению изобретения. N независимыми элементами 110 слежения управляет контроллер 200 по шине 70; контроллер может содержать процессор или другую матрицу логических элементов (например, специализированную интегральную схему), выполненную с возможностью выполнения заданий способа, показанного, например, на Фиг.1, 9 или 10. Согласно конкретному варианту осуществления: N может быть равно трем, четырем или восьми, хотя объем данного изобретения предусматривает любое значение N свыше единицы. После преобразования в цифровую форму и других возможных операций (которые могут включать в себя операции по обработке аналогового или цифрового сигнала) сигнал, принимаемый каскадом приемника (не показан), направляется в поисковый элемент 90 и в элементы 110-1-110-N слежения в качестве входного сигнала S10. Согласно еще одному осуществлению: входной сигнал S10 может быть последовательностью извлеченных выборок, принятых и запомненных ранее. Если каскад 100 слежения работает в МСДКРК-системе (например, в составе мобильной станции), то входной сигнал S10 может содержать пилот-сигналы от многих базовых станций и также может содержать разные информационные сигналы, предназначаемые для других мобильных станций.
Поисковый элемент 90 получает информацию об уровнях сигнала и смещениях во времени экземпляров сигнала, которые он обнаруживает во входном сигнале S10. Например, поисковый элемент 90 может непрерывно (или периодически) просматривать временную область в поиске экземпляров пилот-сигналов от близлежащих базовых станций (например, согласно Активному набору, набору Кандидатов и/или набору Соседей в соответствии с вышеизложенным). Поисковый элемент 90 может также просматривать группу смещений во времени (например, интервал времени) вблизи времени номинального прибытия экземпляра сигнала с каждой базовой станции в поиске многолучевых экземпляров сигнала, возможно создавшихся.
Поисковый элемент 90 направляет создавшиеся данные в контроллер 200 по шине 70. Альтернативно, поисковый элемент 90 может передать данные непосредственно в память 180 контроллера прямым обращением в память без прерывания функций контроллера 200. Это прямое обращение к памяти указано на Фиг.8 пунктирной линией S60 данных, которая непосредственно соединяет поисковый элемент 90 с памятью 180 контроллера. Согласно еще одному осуществлению: память 180 может находиться вне контроллера 200, возможно в составе запоминающего устройства, к которому другие устройства также могут обращаться по шине 70 и/или по другому соединению.
Сортировку данных (например, перечень траекторий обзора, указывающий кодовое смещение, смещение во времени и уровень сигнала) согласно энергии и разнесению можно выполнить с помощью поискового элемента 90 (например, до запоминания в памяти 180) и/или контроллером 200. Контроллер 200 использует запомненные данные для согласования и/или назначения каждого из элементов 110-1-110-N слежения с одним из видов сигнала, которые могут содержаться во входном сигнале S10.
Фиг.12 показывает блок-схему элемента 110 слежения. Декодер 120 принимает входной сигнал S10 и кодовый вектор S20, и выводит декодированный сигнал. Согласно одному из осуществлений: входной сигнал S10 является сигналом комплексной величины; кодовый вектор S30 является комплексной ПШ-последовательностью, и декодер 130 выполняет КМФС-свертку (QPCK) сигнала. Для выполнения этой операции декодер 120 можно сконструировать в разных формах. В приводимом в качестве примера осуществлении кодовый вектор S30 выдается контроллером 200 с ПШ-кодом и смещением во времени, соответствующими назначенной траектории.
В системе согласно стандарту CDMA2000 (описываемому в документах TIA/EIA/IS-2000-1-6 Ассоциации промышленности электросвязи) для ортогонального формирования каналов используются коды Уолша или квазиортогональные функции (КОФ, QOF); и может быть желательным, чтобы декодер 120 удалял коды формирования каналов (эта операция также называется «дешифрованием») и также выполнял КМФС-свертку сигнала. Согласно конкретному примеру: декодер 120 декодирует сигнал, который был кодирован, согласно следующему выражению:
Y=(XI+jXQ)×(-1)(WALSHCH⊕QOFSIGN)×jWALSH ROT×(PNI+jPNQ)
где Y указывает назначенный экземпляр сигнала во входном сигнале S10; j - квадратный корень из -1; (XI+jXQ) - вектор данных; (PNI+jPNQ) - вектор ПШ-кода; WALSHCH - код Уолша для формирования каналов; QOFSIGN - вещественный вектор маски, применимый для кода Уолша; и WALSHROT указывает код Уолша для осуществления или отмены вращения на 90 градусов. Контроллер 200 также может обеспечить соответствующий кодовый вектор S30; и для выполнения этой операции декодер 120 можно построить в разных формах.
Указатель 130 синхронизации принимает декодированный сигнал и выводит сигнал S40 статуса синхронизации. В приводимом в качестве примера осуществлении указатель 130 синхронизации принимает имеющий комплексное значение декодированный сигнал и сравнивает величину этого сигнала с одним или несколькими заданными пороговыми значениями энергии. Согласно еще одному осуществлению: указатель 130 синхронизации может также выводить указатель уровня принимаемого сигнала (УУПС) (не показан), основывающийся на модуле сигнала. Фиг.13 показывает блок-схему осуществления 112 элемента 110 слежения, в которую входит фильтр 140, принимающий декодированный сигнал. В приводимом в качестве примера осуществлении фильтр 140 является фильтром нижних частот, таким как фильтр пилот-сигнала. Этот фильтр можно выполнить в виде фильтра первого порядка с бесконечной импульсной характеристикой.
Сигнал S40 статуса синхронизации может установить статус синхронизации элемента 110 слежения; либо контроллер 200 может установить этот статус по сигналу статуса и/или УУПС. Фиг.14А показывает диаграмму последовательности для установки состояний синхронизации элемента 110 слежения. Первоначально элемент слежения находится в несинхронизированном состоянии, и его можно обозначить как доступный для переназначения. Когда уровень сигнала (например, по указанию УУПС) превысит верхнее пороговое значение Т2, то элемент слежения синхронизируется со своим текущим назначением. Этот элемент слежения остается синхронизированным, пока уровень сигнала не снизится менее нижнего порогового значения Т1. Фиг.14 В представляет этот порядок в виде графика зависимости уровня (Р) пилот-сигнала от времени.
Фиг.15 показывает блок-схему демодулятора 300 согласно осуществлению данного изобретения. Элементы 114-1-114-N демодуляции обрабатывают входной сигнал S10, чтобы получить биты данных «мягкого» решения, которые объединяются в объединителе 80 символов. В приводимом в качестве примера демодуляторе 300 мобильной станции системы МСДКРК: выходной сигнал (не указан) объединителя 80 символов представляет собой совокупность данных мягкого решения для декодирования Витерби. Согласно Фиг.15: один или несколько элементов 114 демодуляции может также направлять в контроллер 200 (например, по шине 70) несколько выходных управляющих сигналов, которые можно использовать во время назначения отводов. Каждый из элементов 114 демодуляции по своей структуре может быть во многом похожим на другие или даже быть идентичным им. Альтернативно, элементы 114 демодуляции могут содержать два или более наборов с разными структурами и/или характеристиками (например, другие операции демодуляции и/или дешифрования, другие характеристики когерентного и/или некогерентного поиска и пр.). Контроллер 200, объединитель 80 символов, и/или один или несколько элементов 114 демодуляции могут включать в себя наборы команд, выполняемых в одном и том же процессоре или в группе процессоров, или в других матрицах логических элементов.
Фиг.16 показывает блок-схему элемента 114 демодуляции, выполненного с возможностью использования в демодуляторе, представленном на Фиг.15. Накапливающий сумматор 150 накапливает принимаемые данные за некоторый символьный период. Пересчетное устройство/вращатель принимает информацию о фазе, модуле и символах от фильтра 140 и накапливающего сумматора 150 и выдает пересчитанные и прошедшие вращение (фазы) символы в буфер 170 обратного магазинного типа (FIFO), который выполнен с возможностью устранения сдвига до выдачи выходного сигнала S30.
Согласно другому осуществлению: один или несколько элементов 114 демодуляции можно выполнить в соответствии с элементом демодуляции, показанным на Фиг.2 в патенте США №5490165 (упоминается выше) и описываемым в данном документе.
Статус синхронизации элемента 114 демодуляции можно установить согласно гистерезисной схеме, показанной на Фиг.14А. На этой схеме: элемент 114 демодуляции, когда он синхронизирован со своим текущим назначением, записывает демодулированные символы в объединитель 80 символов, и, находясь в несинхронизированном состоянии, он не записывает символы в объединитель 80 символов.
В демодуляторе согласно еще одному осуществлению настоящего изобретения: статус, указывающий, синхронизирован ли элемент демодуляции с его текущим назначением, отделен от статуса, записывает ли элемент демодуляции демодулированные символы в объединитель 80 символов. Фиг.17А показывает такого рода схему для установления состояний синхронизирования элемента 114 демодуляции. Вначале элемент слежения находится в несинхронизированном состоянии. Когда уровень сигнала превышает нижнее пороговое значение Т1, тогда элемент демодуляции входит в мягкосинхронизированное состояние. Элемент демодуляции в мягкосинхронизированном состоянии записывает демодулированные символы в объединитель 80 символов, но он может быть также обозначен (например, контроллером 200) как доступный для назначения. Когда уровень сигнала превысит верхнее пороговое значение Т2, то элемент демодуляции синхронизируется со своим текущим назначением. Фиг.17В иллюстрирует этот порядок в виде графика зависимости уровня (Р) сигнала от времени.
При сочетании изображаемой на Фиг.17А схемы со способом согласно Фиг.1, 9 или 10: из числа мягкосинхронизированных элементов демодуляции обозначается как доступный для назначения только элемент, следящий за траекторией с самым слабым сигналом. Согласно другим осуществлениям: можно обозначить как доступные для назначения некоторые или все мягкосинхронизированные элементы демодуляции.
Фиг.18А схематически изображает альтернативный порядок для установления синхронизированных состояний элемента 114 демодуляции. Вначале элемент слежения находится в несинхронизированном состоянии. Когда уровень сигнала превысит пороговое значение Т1, элемент демодуляции синхронизируется со своим текущим назначением. Затем элемент демодуляции переходит из синхронизированного состояния в мягкосинхронизированное состояние, если уровень сигнала превышает пороговое значение Т1. Фиг.18В показывает этот порядок в виде графика зависимости уровня (Р) сигнала от времени.
Согласно изображаемой на Фиг.18А схеме: ни один из синхронизированных элементов не утратил свой синхронизированный статус. Можно было бы ожидать, что такое положение замедлит работу в случае, если число переназначений ограничено, так как количество доступных элементов демодуляции будет лишь уменьшаться. Как указано выше, один или несколько мягкосинхронизированных элементов демодуляции можно обозначить как доступные для назначения, тем самым добавив их к числу доступных элементов.
Фиг.19А показывает блок-схему альтернативной гистерезисной схемы для установления синхронизированных состояний элемента 114 демодуляции. Первоначально элемент слежения находится в несинхронизированном состоянии. Когда уровень сигнала превышает верхнее пороговое значение Т2, тогда элемент демодуляции синхронизируется со своим текущим назначением. После вхождения в синхронизированное состояние элемент демодуляции переходит в мягкосинхронизированное состояние, если сигнал снижается менее нижнего порогового значения Т1. Фиг.19В иллюстрирует этот порядок в виде графика зависимости уровня (Р) сигнала от времени.
Фиг.20А показывает альтернативную схему установления синхронизированных состояний элемента 114 демодуляции. Первоначально элемент слежения находится в несинхронизированном состоянии. Когда уровень сигнала превышает верхнее пороговое значение Т2, элемент демодуляции синхронизируется со своим текущим назначением. Затем элемент демодуляции переходит из синхронизированного состояния в мягкосинхронизированное состояние при превышении уровнем сигнала нижнего порогового значения Т1. Фиг.20В иллюстрирует эту схему в виде графика зависимости уровня (Р) сигнала от времени. Приводимые в качестве примера значения Т1 в схемах Фиг.14А-17А-20А: -24,6; -26; -28 и -30 дБ.
Фиг.21А иллюстрирует альтернативную гистерезисную схему для установления состояний синхронизации элемента 114 демодуляции. Первоначально элемент слежения находится в несинхронизированном состоянии. При превышении уровнем сигнала верхнего порогового значения Т2 элемент демодуляции синхронизируется со своим текущим назначением. После вступления в синхронизированное состояние: элемент демодуляции переходит в мягкосинхронизированное состояние, когда уровень сигнала снижается менее среднего порогового значения Т1. Когда уровень сигнала становится ниже среднего порогового значения Т1, тогда элемент демодуляции переходит из мягкосинхронизированного состояния в несинхронизированное состояние при превышении уровнем сигнала нижнего порогового значения Т0. Фиг.21В иллюстрирует этот порядок в виде графика уровня (Р) сигнала в зависимости от времени. В частном примере: пороговые значения Т1 и Т0 имеют значения -26 дБ и -30 дБ соответственно. Согласно еще одному осуществлению переход между мягкосинхронизированным и несинхронизированным состояниями можно также выполнить гистерезисным.
Излагаемые выше осуществления приводятся с той целью, чтобы специалист данной области техники смог осуществить или использовать способ или устройство для назначения элементов слежения принимаемым сигналам. Возможны различные модификации описываемых осуществлений, и представленные в них принципы также можно применить и для других осуществлений. Например, способ согласно данному изобретению можно применить для группы элементов слежения, которые сами не осуществляют демодуляцию назначенных сигналов.
Изобретение, полностью или частично, можно выполнить в виде аппаратной схемы, в виде схемы, встроенной в специализированную интегральную схему; или в виде микропрограммы, загруженной в энергонезависимое запоминающее устройство, или в виде компьютерной программы, выгружаемой из, или загружаемой в носитель данных в виде машиночитаемого кода; причем этот код представляет собой команды, выполняемые такой матрицей логических элементов, как микропроцессор или другое устройство цифровой обработки сигнала. Поэтому настоящее изобретение не ограничивается изложенными выше осуществлениями, а имеет наиболее широкий возможный объем, соответствующий раскрываемым здесь принципам и обладающим новизной признакам.


Изобретение относится к радиосвязи, в частности к приему сигнала. Техническим результатом является улучшение характеристик принимаемых сигналов при расширенных возможных путях распространения вводимых сигналов по каналу передачи. Варианты осуществления изобретения обеспечивают способ назначения элементов слежения, включая сортировку перечня возможных назначений согласно критерию разнесения. Например, перечень принимаемых экземпляров сигнала сортируют сначала согласно мере энергии и затем снова сортируют согласно критерию разнесения. Согласно другому осуществлению: элемент демодуляции можно обозначить как доступный для назначения с продолжением выдачи демодулированных символов в синхронизированном состоянии. Раскрыты применения для мобильной станции системы МСДКРК для сотовой телефонии. 9 н. и 16 з.п. ф-лы, 31 ил.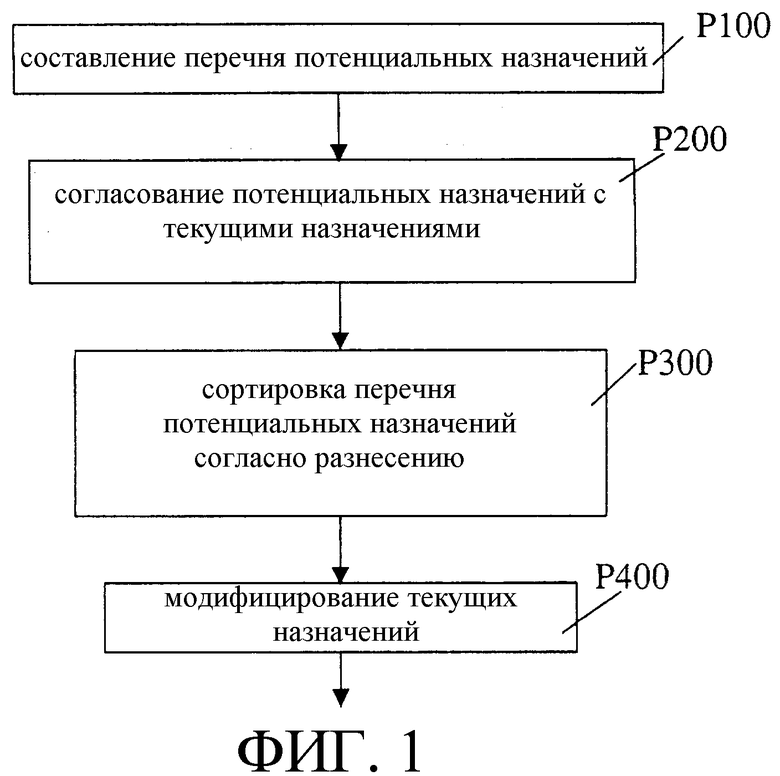
сортируют перечень потенциальных назначений в соответствии с критерием разнесения, причем указанная сортировка перечня возможных назначений согласно критерию разнесения включает в себя сортировку перечня так, что для заданного целого числа n каждое из n последовательных возможных назначений в перечне соответствует разному источнику; и
изменяют текущее назначение выбранного одного элемента из множества элементов слежения на одно из возможных назначений.
сортируют перечень потенциальных назначений в соответствии с критерием разнесения, причем указанная сортировка перечня возможных назначений согласно критерию разнесения включает в себя сортировку перечня так, что для заданного целого числа n каждое из первых n возможных назначений в перечне соответствует разному источнику,
изменяют текущее назначение выбранного одного из множества элементов слежения на одно из возможных назначений.
составляют перечень возможных назначений;
сортируют перечень возможных назначений согласно критерию разнесения; и
модифицируют текущее назначение по меньшей мере одного из набора элементов слежения согласно сортированному перечню возможных назначений,
сортируют перечень возможных назначений согласно значению измерения энергии,
причем после указанной сортировки согласно критерию разнесения и указанной сортировки согласно значению измерения энергии порядок по меньшей мере части сортированного перечня возможных назначений смещается согласно критерию разнесения.
при этом указанное согласование включает в себя обозначение по меньшей мере одного элемента слежения в качестве доступного для назначения при нахождении в синхронизированном состоянии.
при этом указанное согласование включает в себя обозначение по меньшей мере одного элемента слежения в качестве доступного для назначения при нахождении в синхронизированном состоянии.
составляют перечень возможных назначений;
сортируют перечень возможных назначений согласно критерию разнесения, причем указанная сортировка перечня возможных назначений согласно критерию разнесения включает в себя сортировку перечня так, что для заданного целого числа n каждое из n последовательных возможных назначений в перечне соответствует разному источнику; и
модифицируют текущее назначение по меньшей мере одного из набора элементов слежения согласно сортированному перечню возможных назначений.
составляют перечень возможных назначений;
сортируют перечень потенциальных назначений в соответствии с критерием разнесения, причем указанная сортировка перечня возможных назначений согласно критерию разнесения включает в себя сортировку перечня так, что для заданного целого числа n каждое из первых n возможных назначений в перечне соответствует разному источнику; и
модифицируют текущее назначение по меньшей мере одного из набора элементов слежения согласно сортированному перечню возможных назначений.
составляют перечень возможных назначений;
сортируют перечень потенциальных назначений в соответствии с критерием разнесения,
модифицируют текущее назначение по меньшей мере одного из набора элементов слежения согласно сортированному перечню возможных назначений, причем указанная модификация текущего назначения включает в себя этап изменения текущего назначения элемента слежения с обслуживаемой ячейки на ранее необслуживаемую ячейку.
поисковый элемент, выполненный с возможностью приема входного сигнала и составления перечня возможных назначений, соответствующих экземплярам сигнала в данном входном сигнале;
множество элементов слежения, выполненных с возможностью приема входного сигнала; и
контроллер, выполненный с возможностью сортировать перечень возможных назначений согласно критерию разнесения,
причем по меньшей мере некоторые элементы слежения имеют текущее назначение, соответствующее экземпляру сигнала в данном входном сигнале, и
при этом контроллер также выполнен с возможностью модифицировать по меньшей мере одно из текущих назначений согласно сортированному перечню возможных назначений, и модифицировать по меньшей мере одно из текущих назначений посредством изменения текущего назначения элемента слежения с обслуживаемой ячейки на ранее необслуживаемую ячейку.
поисковый элемент, выполненный с возможностью приема входного сигнала и составления перечня возможных назначений, соответствующих экземплярам сигнала во входном сигнале;
множество элементов слежения, выполненных с возможностью приема входного сигнала; и
контроллер, выполненный с возможностью сортировать перечень возможных назначений согласно критерию разнесения,
причем по меньшей мере некоторые элементы слежения имеют текущее назначение, соответствующее экземпляру сигнала во входном сигнале, и
при этом контроллер также выполнен с возможностью модифицировать по меньшей мере одно из текущих назначений согласно сортированному перечню возможных назначений, и сортировать перечень возможных назначений согласно критерию разнесения таким образом, что для заданного целого числа n каждое из первых n возможных назначений в сортированном перечне соответствует разному источнику.
составляют перечень возможных назначений;
сортируют перечень потенциальных назначений в соответствии с критерием разнесения, причем указанная сортировка перечня возможных назначений согласно критерию разнесения включает в себя сортировку перечня так, что для заданного целого числа n каждое из первых n возможных назначений в перечне соответствует разному источнику; и
модифицирует текущее назначение по меньшей мере одного из набора элементов слежения согласно сортированному перечню возможных назначений.
причем элемент слежения выдает демодулированные символы при нахождении в синхронизированном состоянии, и
при этом указанное согласование включает в себя операцию обозначения по меньшей мере одного элемента слежения в качестве доступного для назначения при нахождении в синхронизированном состоянии.
| US 5490165 A, 06.02.1996 | |||
| RU 216874 C1, 22.03.2001 | |||
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ | 1998 |
|
RU2152131C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

