Предлагаемое устройство относится к следящим электрогидравлическим системам управления и может быть использовано в качестве автономного исполнительного электрогидравлического механизма в системах управления летательных аппаратов.
Известны автономные электрогидравлические приводы электрогидростатического типа, например привод ЕНА фирм Lucas Aerospace, Liebherr-Aerospace Lindenberg, схема которого показана на Фиг.1 (см. Состояние и результаты научно-исследовательских и опытно-конструкторских работ по созданию перспективных электрогидростатических приводов для систем управления полетом самолетов Airbus // Обзор по материалам иностранной печати. Выпуск 1/ Под общей редакцией Е.А.Малышева - М., НИИСУ, 2003. Первоисточник: Moorhouse Derek, Maxwell Carl, Bildstein Marcus, Electro hydrostatic actuator for primary flight controls of very large aircraft, Recent Advances in Aerospace Activation Systems and Components, June 13-15, 2001, Toulouse, France).
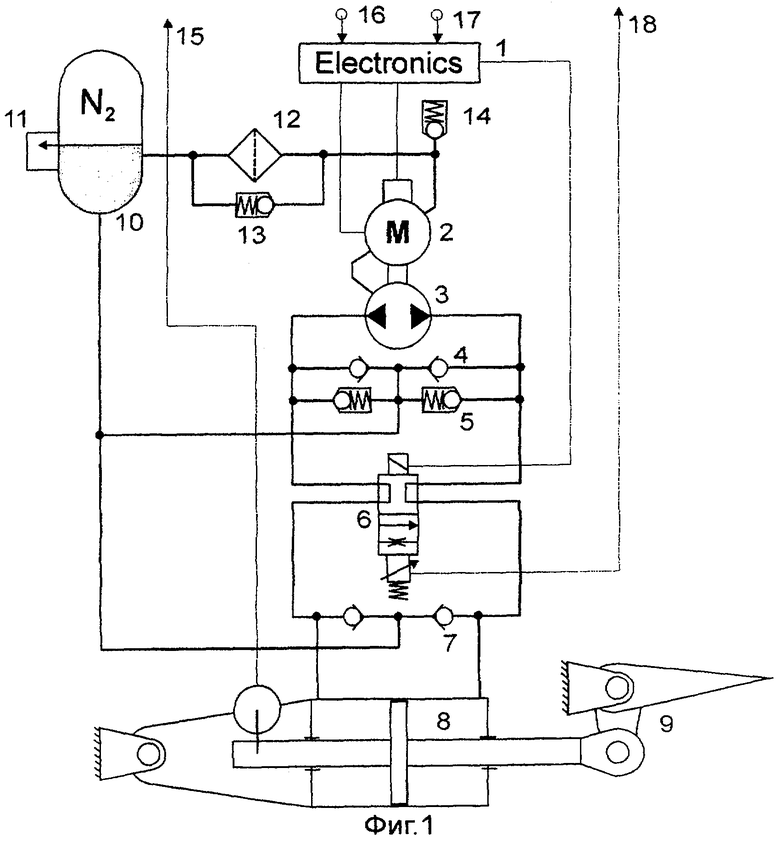
Привод включает блок электроники электродвигателя и клапана кольцевания 1, бесколлекторный двигатель постоянного тока 2, реверсивный нерегулируемый насос 3, гидроцилиндр 8 и вспомогательные элементы: газогидравлический гидрокомпенсатор 10, антикавитационные клапаны насоса 4, предохранительные клапаны 5, электрогидравлический клапан кольцевания 6, антикавитационные клапаны цилиндра 7, фильтр 12 с его предохранительным клапаном 13, клапан безопасности 14. Привод замкнут позиционной обратной связью 15.
Скорость перемещения штока гидроцилиндра 8 регулируется подачей насоса 3, которая в свою очередь управляется скоростью вращения вала электродвигателя 2, задаваемой электронным блоком 1. В замкнутой гидросистеме привода необходимо поддерживать некоторый минимальный уровень давления (обычно порядка 0,3...0,8 МПа) для обеспечения надежной работы насоса без кавитационных процессов в нем и силовом гидроцилиндре. Этот уровень давления обеспечивается работой гидрокомпенсатора 10 при всех допустимых температурах рабочей жидкости.
При нарастании управляющего сигнала на электродвигателе электрогидростатического привода от нулевого уровня часть сигнала идет на преодоление момента сухого трения в насосе и подшипниках электродвигателя, после начала вращения вала электромотора требуется некоторая скорость его вращения, при которой насос своей подачей компенсирует расход утечки жидкости через свои зазоры при давлении подачи, необходимом для преодоления сухого трения в гидроцилиндре и нагрузке привода. Таким образом, чтобы сдвинуть объект регулирования, на вход электрогидростатического привода надо подать некоторый минимальный управляющий сигнал, приводящий к появлению зоны нечувствительности на управляющей характеристике. Значительная величина этой зоны нечувствительности ухудшает работу такого привода при малых управляющих сигналах и ограничивает функциональные возможности электрогидростатического привода.
Насос электрогидростатического привода должен работать при переменной скорости вращения приводного вала от нулевой до скорости в 10...20 тысяч оборотов в минуту, обеспечивая пропорциональность между вытесняемым расходом жидкости и скоростью вращения вала, обладать малым трением подвижных частей и обеспечивать небольшой расход утечки жидкости через зазоры, выдерживать высокие давления нагнетания и иметь большой ресурс работы. Обеспечение комплекса этих противоречивых требований представляет собой трудную техническую задачу, для решения которой требуются высококачественные материалы, специальные технологии и высокоточная обработка деталей. Необходимость обеспечения реверсивной работы насоса в рассматриваемом приводе сужает поле его возможных конструктивных решений, дополнительно усложняет задачу и увеличивает стоимость насоса.
Технической задачей заявляемого изобретения является устранение указанных недостатков.
Поставленная задача решается тем, что в заявляемом автономном электрогидравлическом приводе с комбинированным управлением скорости выходного звена, содержащем нерегулируемый насос, электронные блоки управляющего микропроцессора и усилителя-инвертора, бесколлекторный электродвигатель постоянного тока, гидроцилиндр, гидрокомпенсатор, клапаны подпитки, предохранительные клапаны, фильтр, датчик положения штока гидроцилиндра,
согласно изобретению использован нереверсивный нерегулируемый насос, подача которого регулируется изменением скорости вращения вала приводного электродвигателя и клапаном реверса с большой площадью рабочих окон, управляемым электрогидравлическим усилителем (ЭГУ),
согласно изобретению применен алгоритм управляющего микропроцессора, по которому работа насоса и клапана реверса обеспечивает различные режимы регулирования скорости выходного звена привода в зависимости от величины сигнала рассогласования следящего привода: при больших и средних сигналах рассогласования реализуется преимущественно объемный принцип регулирования скорости штока гидроцилиндра с его высокими энергетическими показателями, при малых сигналах рассогласования обеспечивается дроссельный принцип регулирования скорости, для которого характерны максимальная чувствительность и минимальные ошибки воспроизведения заданного движения,
согласно изобретению использован вспомогательный насос с автоматическим регулятором подачи, обеспечивающий питание ЭГУ клапана реверса.
Согласно изобретению предлагаемый привод отличается от прототипа:
- использованием нереверсивного насоса и клапана реверса с большой площадью рабочих окон, управляемого ЭГУ, для изменения направления движения выходного звена привода;
- применением алгоритма работы управляющего микропроцессора и клапана реверса, обеспечивающих различные режимы регулирования скорости выходного звена привода в зависимости от величины сигнала рассогласования следящего привода: при больших и средних сигналах рассогласования реализуется преимущественно объемный принцип регулирования скорости штока гидроцилиндра, при малых сигналах рассогласования используется дроссельный принцип регулирования скорости;
- использованием вспомогательного насоса с автоматическим регулятором подачи, который обеспечивает гидропитание ЭГУ.
Указанные отличия позволяют:
- использовать в приводе более простые и дешевые нереверсивные нерегулируемые насосы, например поршневой насос с клапанным распределением;
- обеспечить комбинированное управление скоростью выходного звена привода, при котором большие и средние сигналы рассогласования следящего привода отрабатываются с малыми потерями мощности, близкими к минимальным потерям при объемном принципе регулирования. Малые сигналы рассогласования, при которых потребляемая приводом мощность мала и энергетические показатели не столь важны, переводят привод в режим дроссельного регулирования, для которого характерны максимальная чувствительность и минимальные ошибки воспроизведения заданного движения.
- использовать клапаны с увеличенными диаметрами плунжера, что упрощает создание мощных и динамичных автономных приводов, способных отрабатывать сигналы малой амплитуды (например, амплитуды 0,1...0,2% от максимального сигнала, требуемые для управления летательными аппаратами с неустойчивой аэродинамической компоновкой).
Указанные отличия являются принципиальными и создают новизну предлагаемого решения.
Сущность заявляемого изобретения поясняется чертежами, где:
на Фиг.1 показана схема прототипа электрогидравлического привода,
на Фиг.2 показана принципиальная схема заявляемого автономного электрогидравлического привода с комбинированным управлением скорости выходного звена.
Автономный электрогидравлический привод с комбинированным управлением скорости выходного звена (привод) содержит электронные блоки управляющего микропроцессора и усилителя-инвертора, обеспечивающего работу бесколлекторного электродвигателя постоянного тока 9, нереверсивный нерегулируемый насос 8, золотниковый клапан реверса 14, управляемый электрогидравлическим усилителем с электромеханическим преобразователем 13, гидроцилиндр 16 и вспомогательные элементы: гидрокомпенсатор 12, вспомогательный насос 11 с регулятором его подачи 10, клапаны подпитки 2, предохранительные клапаны сливной полости 6 и полости нагнетания 7, ограничитель расхода, фильтр 4 с его предохранительным клапаном 5, датчик положения золотника клапана реверса 15, датчики перепада давления 3 на входе и выходе клапана реверса, датчик положения штока гидроцилиндра 1.
Привод (фиг.2) работает следующим образом.
Клапан реверса 14 управляется микропроцессором с помощью ЭГУ таким образом, что смещение золотника клапана пропорционально сигналу рассогласования позиционного контура следящего привода. Пропорциональный режим обеспечивается работой контура управления клапаном, замкнутого позиционной отрицательной обратной связью с помощью датчика 15 положения золотника клапана. Рабочие окна клапана реверса имеют большую площадь, обеспечивающую малый (порядка нескольких атмосфер) перепад давления на полностью открытых окнах даже при максимальной подаче насоса. При больших и средних сигналах рассогласования следящего привода управляющий микропроцессор задает скорость вращения электродвигателя пропорционально абсолютной величине сигнала рассогласования. В результате при средних и больших открытиях окон клапана абсолютная величина скорости перемещения штока гидроцилиндра 16 регулируется преимущественно подачей насоса 8, которая в свою очередь управляется скоростью вращения вала электродвигателя 9, т.е. работа привода с комбинированным управлением похожа на работу электрогидростатического привода с той лишь разницей, что электродвигатель и насос работают в нереверсивном режиме, а изменение направления движения штока гидроцилиндра осуществляется переключением клапана реверса 14.
При малых сигналах рассогласования следящего привода управляющий микропроцессор, используя информацию датчика 3 перепада давления на входе в клапан реверса, регулирует скорость вращения электродвигателя и, соответственно, подачу насоса таким образом, что поддерживает давление питания клапана реверса на некотором минимальном уровне. При этом скорость выходного звена привода регулируется золотниковым клапаном при его малых открытиях подобно тому, как это происходит в дроссельном приводе. Сигнал датчика 3 перепада давления на выходных каналах клапана реверса используется для корректировки работы микропроцессора с целью улучшения характеристик привода при его нагружении.
Вспомогательный насос 11 малой мощности обеспечивает гидравлическое питание ЭГУ, при этом давление питания поддерживается щелевым регулятором 10, стоящим в магистрали всасывания вспомогательного насоса. При повышении давления питания оно действует на выступ втулки регулятора и сдвигает ее вправо, прикрывая окна всасывания насоса и уменьшая его подачу. Давление питания ЭГУ формируется балансом расходов подачи насоса и потребления ЭГУ. В результате работы регулятора подачи это давление поддерживается на постоянном уровне, не зависящем от скорости вращения вала электродвигателя в практическом диапазоне ее изменения.
Давление в сливной полости привода формируется гидрокомпенсатором, который без ущерба для принципа работы привода может быть выполнен газогидравлическим или пружинным, однако в этом случае привод находится под избыточным давлением не только во время работы, но весь срок его службы. Это усложняет задачу обеспечения герметичности наружных уплотнений привода и, по этой причине, ограничивает выбираемую величину давления в сливной полости привода.
В гидрокомпенсаторе 12 предлагаемого привода давление жидкости в рабочей камере создается почти полностью за счет усилия сжатия со стороны плунжера, торцевая камера которого соединена с каналом нагнетания вспомогательного насоса. В выключенном приводе избыточное давление практически отсутствует, что упрощает обслуживание, исключает возможность утечки жидкости во время хранения привода и обеспечивает щадящий режим работы его уплотнений в этом состоянии. В работающем приводе плунжер гидрокомпенсатора может развивать давление в сливной магистрали до величины, оптимальной для повышения динамической жесткости привода.
Предохранительный клапан сливной полости 6 препятствует возможному повышению давления в гидрокомпенсаторе при внешней помогающей силе на штоке гидроцилидра. Предохранительный клапан полости нагнетания 7, открываясь при чрезмерном нагружении привода, ограничивают величину максимального давления в ней. Предохранительный клапан фильтра 5 обеспечивает работу привода и целостность фильтра при его засорении. Клапаны подпитки 2 препятствуют падению давления в полостях гидроцилиндра ниже минимального уровня при наличии помогающей силы на штоке. Ограничитель расхода не является обязательным элементом привода, он может быть любого известного типа, например на основе дроссельных регуляторов, и служит для улучшения его работы при наличии значительной внешней помогающей силы на штоке гидроцилидра.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД С ЭЛЕКТРОГИДРАВЛИЧЕСКИМ КЛАПАНОМ РЕВЕРСА И ВЗВОДИМЫМ ГИДРОКОМПЕНСАТОРОМ | 2005 |
|
RU2296892C1 |
| ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД | 2005 |
|
RU2289189C1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |
| ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД С ВЗВОДИМЫМ ГИДРОКОМПЕНСАТОРОМ И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483979C2 |
| ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД С ВЗВОДИМЫМ ГИДРОКОМПЕНСАТОРОМ | 2005 |
|
RU2289878C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ДИНАМИЧЕСКОМУ ДАВЛЕНИЮ | 2024 |
|
RU2826237C1 |
Привод предназначен для управления скоростью выходного звена исполнительного механизма в системах управления летательных аппаратов. Привод содержит нереверсивный нерегулируемый насос, электронные блоки управляющего микропроцессора и усилителя-инвертора, бесколлекторный электродвигатель постоянного тока, золотниковый клапан реверса, электрогидравлический усилитель (ЭГУ) с электромеханическим преобразователем, гидроцилиндр, гидрокомпенсатор, вспомогательный насос с регулятором его подачи, клапаны подпитки, предохранительные клапаны, ограничитель расхода, фильтр, датчик положения золотника, клапан реверса, датчики перепада давления на входе и выходе клапана реверса, датчик положения штока гидроцилиндра. В приводе применен клапан реверса с большой площадью рабочих окон, обеспечивающих различные режимы регулирования скорости выходного звена привода в зависимости от величины сигнала рассогласования следящего привода: при больших и средних сигналах рассогласования - объемный принцип регулирования скорости штока гидроцилиндра, при малых сигналах рассогласования - дроссельный принцип регулирования скорости. Технический результат - повышение надежности привода. 1 з.п. ф-лы, 2 ил.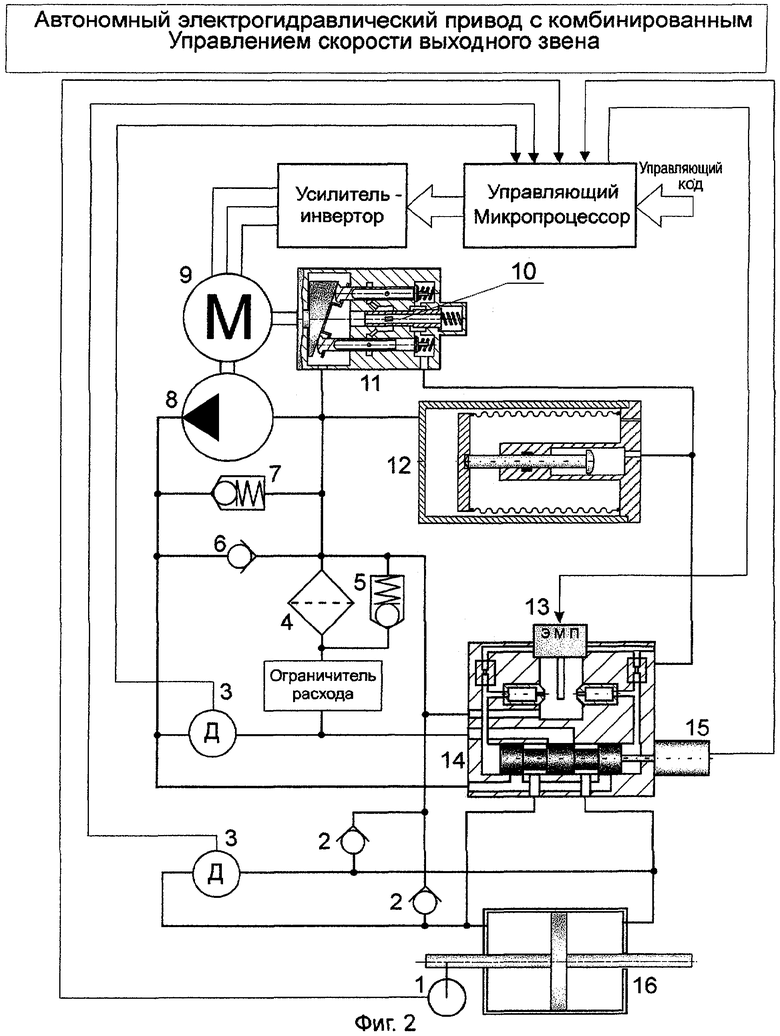
| DE 3640082 A1, 01.06.1988 | |||
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 1993 |
|
RU2105881C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| RU 2052567 C1, 20.01.1996 | |||
| Электрогидравлический следящий привод с объемным управлением | 1974 |
|
SU517879A1 |

