Изобретение относится к следящим электрогидравлическим приводам и может быть использовано в электрогидравлических системах в качестве автономного рулевого привода управления полетом летательного аппарата.
Известен автономный электрогидравлический привод с комбинированным управлением скорости выходного звена, который содержит электронные блоки управляющего микропроцессора и усилителя-инвертора, бесколлекторный электродвигатель постоянного тока, нерегулируемый насос, гидроцилиндр, гидрокомпенсатор, клапаны подпитки, предохранительные клапаны, фильтр, датчик положения штока гидроцилиндра, электрогидравлический клапан реверса с линейным электродвигателем, датчик положения золотника клапана реверса и датчики перепада давления на входе и выходе клапана реверса (Патент RU №2305210/C2, МПК F15B 9/09, опубл. 27.08.2007).
Недостатком аналога является нестабильность выходных характеристик работы автономного электрогидравлического привода.
Наиболее близким по технической сущности является автономный электрогидравлический привод электрогидростатического типа фирмы Liebherr-Aerospace Lindenberg, содержащий блок электроники электродвигателя и клапана кольцевания, бесколлекторный двигатель постоянного тока, реверсивный нерегулируемый насос, гидроцилиндр, и вспомогательные элементы: газогидравлический гидрокомпенсатор, антикавитационные клапаны насоса, предохранительные клапаны, электрогидравлический клапан кольцевания, антикавитационные клапаны цилиндра, фильтр с его предохранительным клапаном, клапан безопасности, позиционная обратная связь (Константинов Г.С. Перспективы и проблемы создания рулевых приводов с электрическим энергопитанием / Г.С. Константинов, В.М. Кувшинов, И.П. Кузнецов, А.А. Паршин, П.Г. Редько, А.И. Стеблинкин, Л.В. Халецкий // Вестник Московского авиационного института: статья в журнале - научная статья, Москва, 2013 года. Москва: Московский авиационный институт (национальный исследовательский университет), 2013 года. С. 149-160. - EDN QCAWJZ, ISSN: 0869-6101).
Недостатком прототипа является неустойчивая работа автономного электрогидравлического рулевого привода при изменении нагрузки на исполнительном гидродвигателе, а также рассогласование входных сигналов от электродвигателя и значений действительной потребности энергии за насосом в ситуации случайной нагрузки на гидропривод.
Задачей изобретения является расширение функциональных возможностей автономного электрогидравлического рулевого привода.
Технический результат изобретения - повышение устойчивости и точности работы автономного электрогидравлического рулевого привода за счет дополнительной гидромеханической обратной связи по динамическому давлению гидродвигателя, которая изменяет рабочий объем насоса в зависимости от действительной величины колебаний давления в полостях гидродвигателя автономного электрогидравлического рулевого привода под нагрузкой переменного или случайного характера.
Поставленная задача решается, а технический результат достигается тем, что автономный электрогидравлический рулевой привод, состоящий из приводного электродвигателя, соединённого через вал с насосом и соединённого через усилитель с управляющим микроконтроллером, на вход которого подается внешний сигнал управления, блока подпитки, содержащего пневмогидроаккумулятор, обратные и предохранительные клапаны, электрогидравлического распределителя, управляемого микроконтроллером, гидродвигателя, оснащенного датчиком перемещения, выход которого соединен с управляющим микроконтроллером, отличающийся тем, что содержит дополнительную гидромеханическую обратную связь по динамическому давлению гидродвигателя, включающую в себя клапан, соединенный с полостями гидродвигателя, а также соединенный с дросселем, подпружиненным плунжером, толкателями с настраиваемыми пружинами, причем сами толкатели соединены между собой механически и в то же время связаны с коромыслом и далее с многопозиционным трехлинейным распределителем, находящимся внутри поршня, который связан механически с насосом.
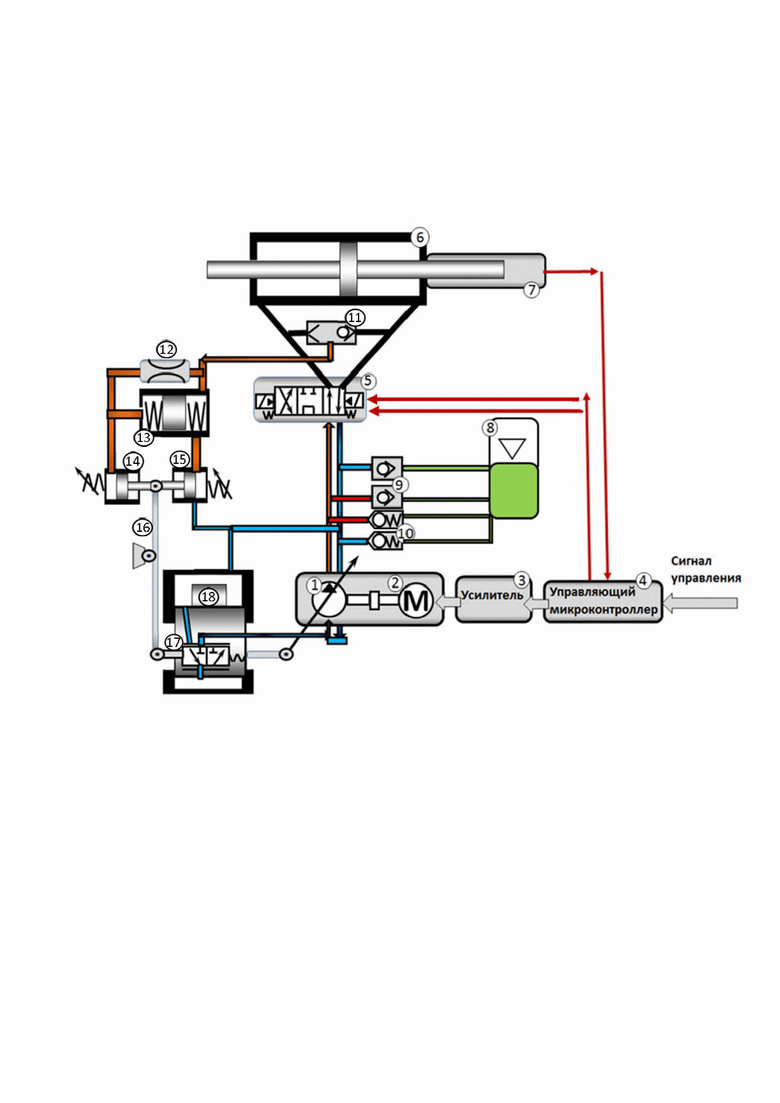
Существо изобретения поясняется чертежом, на котором изображена принципиальная схема автономного электрогидравлического рулевого привода с дополнительной гидромеханической обратной связью по динамическому давлению гидродвигателя.
Автономный электрогидравлический рулевой привод содержит насос 1 с приводным электродвигателем 2, усилителем 3 и управляющим микроконтроллером 4, при этом насос 1 обеспечивает подачу рабочей жидкости к электрогидравлическому распределителю 5, подключенному к гидродвигателю 6, оснащенному датчиком перемещения 7. Рулевой привод также содержит блок подпитки, состоящий из пневмогидроаккумулятора 8, обратных 9 и предохранительных 10 клапанов. В свою очередь полости гидродвигателя 6 связаны с гидромеханическим устройством дополнительной обратной связи по динамическому давлению, которое включает в себя клапан 11, соединенный с полостями гидродвигателя 6, а также соединенный с дросселем 12, подпружиненным плунжером 13, толкателями с пружинами 14 и 15, пружины которых настраиваются извне, причем сами толкатели 14 и 15 соединены между собой механически и в то же время связаны с коромыслом 16 и далее с многопозиционным трехлинейным распределителем 17, находящимся внутри поршня 18, который связан механически с насосом 1. Полость низкого давления гидродвигателя 6 связана с полостями поршня 18.
Автономный электрогидравлический рулевой привод с дополнительной обратной связью по динамическому давлению гидравлической системы самолета работает следующим образом.
Частота вращения насоса 1 определяется приводным электродвигателем 2, усилителем 3 и управляющим микроконтроллером 4. Насос 1 обеспечивает подачу рабочей жидкости к электрогидравлическому распределителю 5, подключенному к гидродвигателю 6, оснащенному датчиком перемещения 7, выход которого соединен с управляющим микроконтроллером 4. Электрический сигнал, подаваемый на электромагниты электрогидравлического распределителя 5, осуществляет управление направлением движения поршня гидродвигателя 6. В среднем положении электрогидравлического распределителя 5 при отсутствии сигнала управления осуществляется разгрузка насоса 1.
Блок подпитки, состоящий из обратных 9 и предохранительных 10 клапанов, соединяющихся с линиями нагнетания и слива и пневмогидроаккумулятором 8, обеспечивает величину давления в системе рулевого привода.
Гидромеханическое устройство дополнительной обратной связи по динамическому давлению начинает работать при возникновении колебаний давления в полостях гидродвигателя 6 рулевого привода под нагрузкой переменного или случайного характера. При возникновении колебаний давления в полостях гидродвигателя 6 информационный сигнал в виде динамического давления через клапан 11 поступает на гидромеханическое устройство дополнительной обратной связи, содержащее в себе дроссель 12, соединенный с подпружиненным плунжером 13 и толкателями 14 и 15, оснащенные настраиваемыми пружинами. Под действием возникшего перепада давления в полостях толкателей 14 и 15, которое равно по своему значению перепаду давления на гидродвигателе 6, происходит перемещение коромысла 16, которое в свою очередь приводит к смещению многопозиционного трехлинейного распределителя 17, находящегося в поршне 18. Перемещение поршня 18, который механически связан с насосом 1, приводит к изменению подачи насоса 1 в соответствии с корректирующим сигналом гидромеханического устройства обратной связи.
Таким образом, заявляемый автономный электрогидравлический рулевой привод позволяет расширить функциональные возможности автономного электрогидравлического рулевого привода, обеспечить стабильные выходные характеристики и оптимальное потребление мощности насоса в зависимости от действующих действительных нагрузок на исполнительном гидродвигателе.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С РЕГУЛЯТОРОМ МОЩНОСТИ | 2024 |
|
RU2820916C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| Блок передачи мощности гидравлической системы самолета | 2023 |
|
RU2803904C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814642C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814901C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814840C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
Изобретение относится к следящим электрогидравлическим приводам и может быть использовано в электрогидравлических системах в качестве автономного рулевого привода управления полетом летательного аппарата. Изобретение содержит дополнительную гидромеханическую обратную связь по динамическому давлению гидродвигателя, включающую в себя клапан, соединенный с полостями гидродвигателя, а также соединенный с дросселем, подпружиненным плунжером, подпружиненными толкателями, пружины которых настраиваются извне, причем сами толкатели соединены между собой механически и в то же время связаны с коромыслом и далее с многопозиционным трехлинейным распределителем, находящимся внутри поршня, который связан механически с насосом. Техническим результатом изобретения является повышение устойчивости и точности работы автономного электрогидравлического рулевого привода за счет дополнительной гидромеханической обратной связи по динамическому давлению гидродвигателя, которая изменяет рабочий объем насоса в зависимости от действительной величины колебаний давления в полостях гидродвигателя автономного электрогидравлического рулевого привода под нагрузкой переменного или случайного характера.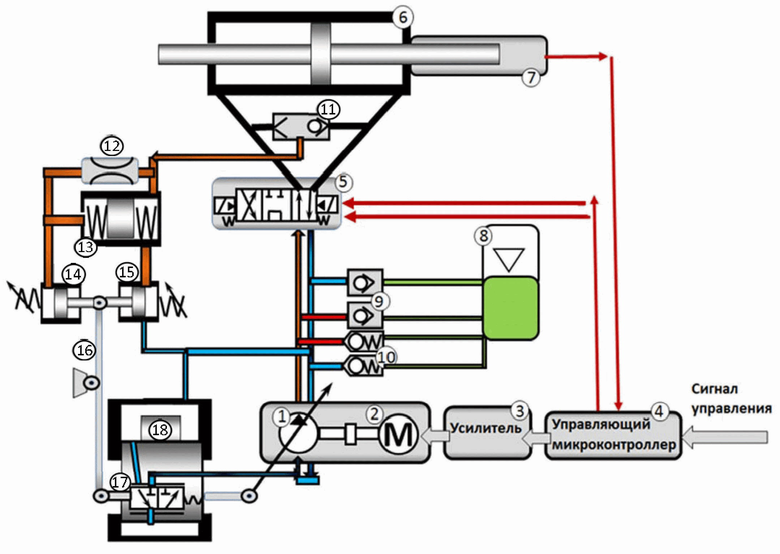
Автономный электрогидравлический рулевой привод, состоящий из приводного электродвигателя, соединённого через вал с насосом и соединённого через усилитель с управляющим микроконтроллером, на вход которого подается внешний сигнал управления, блока подпитки, содержащего пневмогидроаккумулятор, обратные и предохранительные клапаны, электрогидравлического распределителя, управляемого микроконтроллером, гидродвигателя, оснащенного датчиком перемещения, выход которого соединен с управляющим микроконтроллером, отличающийся тем, что содержит дополнительную гидромеханическую обратную связь по динамическому давлению гидродвигателя, включающую в себя клапан, соединенный с полостями гидродвигателя, а также соединенный с дросселем, подпружиненным плунжером, толкателями с настраиваемыми пружинами, причем сами толкатели соединены между собой механически и в то же время связаны с коромыслом и далее с многопозиционным трехлинейным распределителем, находящимся внутри поршня, который связан механически с насосом.
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С РЕГУЛЯТОРОМ МОЩНОСТИ | 2024 |
|
RU2820916C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814840C1 |
| Блок передачи мощности гидравлической системы самолета | 2023 |
|
RU2803904C1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| DE 3640082 A1, 01.06.1988. | |||

