Изобретение относится к измерительной технике, точнее к области определения координат поверхности (измеряемого изделия)? и может быть использовано в машиностроении, станкостроении, оптико-механической промышленности, а также во всех высокотехнологических отраслях промышленности, науки, техники и т.д.
Известна координатно измерительная машина (КИМ) "MicroVal 454(ЕМ) (Brown&Sharpe) /1/ для определения координат поверхности измеряемого изделия. КИМ - это координатно-измерительная машина, содержащая измерительный стол с одной боковой стенкой, подвижный мост портального типа, опирающийся с одной стороны на боковую стенку, а с другой стороны на измерительный стол и с возможностью перемещения по координате Y, три взаимно перпендикулярных датчика линейных перемещений X, Y, Z (рабочий объем равен 457×508×406 мм), каждый из которых регистрирует свою координату и которые установлены с возможностью взаимно перпендикулярного перемещения по трем координатам X, Y, Z, и датчик касания (ДК) со щупом. Машина имеет устройства, которые позволяют мосту перемещаться по координате Y на 508 мм, датчику по координате Z и датчику касания со щупом перемещаться вдоль координаты Х на 457 мм, а вдоль координаты Z на 406 мм. Датчик по координате Y установлен на боковой стенке измерительного стола с одного его края. Датчики по координатам X, Z и датчик касания (Rensihaw) /2/ со щупом, который жестко с ним связан, установлены на мосту. Каждый датчик линейных перемещений имеет свою измерительную решетку, считывающую головку и направляющую, причем считывающая головка датчика линейных перемещений по координате Х жестко связана со считывающей головкой датчика линейных перемещений по координате Z, и они имеют возможность перемещения вдоль направления измерительной решетки датчика линейных перемещений по координате Х, и считывающая головка по координате Y жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, и направляющая по Х и по Y, на основе диабаза, состоит из двух взаимно перпендикулярных плоскостей, жестко связанных между собой, а щуп установлен в датчике касания таким образом, что он имеет возможность касания с измерительным столом.
Устройство работает следующим образом
Изделие, у которого необходимо определить координаты, устанавливается на измерительном столе. Включается программа, по которой ДК - Renishaw перемещается по направлению к измеряемой поверхности изделия вдоль координаты, которую КИМ должна определить в момент касания. Предварительно щуп центрируется в указанном узле для совмещения его оси с направлением оси координаты, вдоль которой будет измеряться координата поверхности. При соприкосновении с измеряемой поверхностью вырабатывается электрический сигнал, который подается на интерфейс М17. Координата точки касания соотносится с общей системой координат по данной оси и регистрируется в УЧПУ, PC или устройстве, которым оснащена данная КИМ. По каждой координате установлен датчик линейных перемещений с необходимым диапазоном измерения координат, который может быть до метра и более, в зависимости от габаритов измеряемого изделия. Известный ДК действует лишь в малом диапазоне перемещения порядка 1 мм. В силу того, что при измерениях используются два датчика с разными принципами действия, необходимо обеспечить как можно более точную их совместимость.
Датчик касания в момент соприкосновения с поверхностью вырабатывает электрический сигнал, который подается на двигатель, для остановки измерительного датчика. В качестве измерительного датчика линейных перемещений, как правило, используют датчик со штриховыми (дифракционными) линейными шкалами.
Точность перемещения по каждой отдельной координате 5 мкм. Наилучшая достигаемая объемная точность ЗКИМ составляет 10 микрон/325 мм при повторяемости 4 микрона.
Данное устройство имеет следующие недостатки.
Ограничение точности вследствие следующих обстоятельств
1.1. Головка датчика касания, согласно описанию, содержит два узла, работающих на изгиб: две металлические мембраны и щуп, которые в результате многократных измерений, приобретают нелинейные остаточные деформации (механический гистерезис), ставящие ограничения по точности, разрешению и повторяемости системы.
1.2. Сигнал, полученный в результате механической деформации щупа и мембран, ставит ограничение на реакцию системы как по времени отклика на происходящий контакт, так и по инерционности происходящих изменений в структуре вещества самих мембран и щупа датчика касания. Это приводит к временной задержке вырабатываемого импульса остановки измерительного датчика и, следовательно, к искажению величины измеряемой координаты.
1.3. Большой вес моста обладает большой инерцией при перемещении по измерительному столу. В результате этого появляется момент, который приводит к некоторому запаздыванию одного плеча моста относительно другого. Движение плеча моста у края стола, где установлен измерительный датчик по Y, жестко связанный с двигателем, осуществляется с некоторым опережением относительно другого плеча, который перемещается благодаря жесткости моста. Это приводит к погрешности при определении координаты Y.
1.4. Конструктивные особенности датчика касания, содержащего большое количество механических элементов, существенно увеличивает его размеры (Ф82 мм), вес и количество взаимодействий между ними, что приводит к увеличению его инерционности и уменьшению точности при определении точки касания.
1.5. Большая сила ощупывания (50, 75 и 150 грамм) измерительной головки ДК приводит к деформациям измеряемой поверхности и уменьшению точности измеряемой координаты особенно в случае измерения поверхностей с невысокой твердостью.
1.6. Различные принципы, заложенные в двух датчиках (измерительном и касания), действующих независимо и в то же время дополняющих друг друга, при определении величины координаты изделия по каждой отдельной оси координат требуют дополнительных условий для их совместимости. Различные принципы построения этих двух датчиков, имеющих разные разрешения и точностные характеристики, обуславливают необходимость сопряжения и совместимости этих двух датчиков. Сопряжение двух разных датчиков требует их высокой точности установки относительно друг друга. Неточность в установке, приводит к уменьшению точности системы при определении каждой координаты в отдельности и при определении трех координат в целом.
2. Большой вес ЗКИМ, связанный с использованием точной каменной направляющей по координате X, установленной на мосту, приводит к увеличению инерции системы и, как следствие, к уменьшению точности машины.
Наиболее близким по технической сущности является ЗКИМ "Crysta-Plus 504" (Mitutoyo) /3/ для определения координат поверхности измеряемого изделия. ЗКИМ - это координатно-измерительная машина, содержащая измерительный стол с одной боковой стенкой, подвижный мост портального типа, опирающийся с одной стороны на боковую стенку, а с другой стороны на измерительный стол и с возможностью перемещения по столу по координате Y, три взаимно перпендикулярных датчика линейных перемещений X, Y, Z (рабочий объем равен 505×405×405 мм), каждый из которых регистрирует свою координату и которые установлены с возможностью взаимно перпендикулярного перемещения по трем координатам X, Y, Z, и датчик касания со щупом типа Rensihaw /2/. Машина имеет устройства, которые позволяют мосту перемещаться по координате Y на 405 мм, датчику по координате Z совместно с датчиком касания со щупом по координате Х на 505 мм, а вдоль координаты Z на 405 мм. Датчик по координате Y установлен на боковой стенке у одного края измерительного стола, а датчики по координатам X, Z и датчик касания (Rensihaw) со щупом установлены на мосту, и все три датчика имеют свою измерительную решетку, считывающую головку с индикаторной решеткой и направляющую, причем считывающая головка датчика линейных перемещений по координате Х жестко связана со считывающей головкой датчика линейных перемещений по координате Z, и обе считывающие головки имеют возможность перемещения вдоль направления измерительной решетки датчика линейных перемещений по координате X, и считывающая головка по координате Y жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, а направляющая по Х и по Y - каменная и состоит из двух взаимно перпендикулярных плоскостей, жестко связанных между собой, а щуп установлен в датчике касания таким образом, что он имеет возможность касания с измерительным столом.
Устройство работает следующим образом.
Изделие устанавливается на измерительном столе. Включается программа, по которой ДК со щупом перемещается с помощью двигателей по направлению к точке на измеряемую поверхность изделия вдоль координаты, которую КИМ должна определить в момент касания. Датчики линейных перемещений по X, Y и Z определяют координату измеряемой поверхности изделия в пределах своего расхода, а ДК со щупом позволяет в момент касания определить малую долю измеренной этими 3-мя датчиками величину координаты изделия, являющуюся долей периода дифракционной решетки измерительного датчика. Датчик касания и щуп в момент соприкосновения с поверхностью изделия вырабатывает электрический сигнал, который подается на двигатели, жестко связанные с измерительными датчиками линейных перемещений для их остановки. Повторяемость ДК при измерении по одной координате - 1 микрон.
Точность ЗКИМ "Crysta Plus 504" определяется по следующей формуле:
Q=(2,9+41L/1000)микрон,
где L в мм.
Точность, достигаемая по всему объему - 9 микрон при повторяемости 3 микрона.
Данное устройство имеет те же недостатки, что и вышеприведенный аналог.
1. Ограниченная точность вследствие следующих обстоятельств:
1.1. Головка датчика касания, согласно описанию, содержит два узла, работающих на изгиб: две металлические мембраны и щуп, которые в результате многократных измерений, приобретают нелинейные остаточные деформации (механический гистерезис), ставящие ограничения по точности, разрешению и повторяемостью системы.
1.2. Сигнал, полученный в результате механической деформации щупа и мембран, ставит ограничение на реакцию системы как по времени отклика на происходящий контакт, так и по инерционности происходящих изменений в структуре вещества самих мембран и щупа датчика касания. Это приводит к временной задержке вырабатываемого импульса остановки первого датчика и жестко с ним связанных мембран и, следовательно, к уменьшению точности при определении величины измеряемой координаты.
1.3. Большой вес моста обладает большой инерцией при перемещении по измерительному столу. В результате этого появляется момент, который приводит к некоторому запаздыванию одного плеча моста относительно другого. Во время движения моста, одно плечо моста у края стола, где установлен измерительный датчик no Y и жестко связанный с ним двигатель, осуществляется с некоторым опережением относительно другого плеча моста, установленного у противоположного края стола. Второе плечо перемещается лишь благодаря жесткости моста. Это приводит к погрешности при определении координаты Y.
1.4. Конструктивные особенности датчика касания, содержащего большое количество механических элементов, существенно увеличивает его размеры (Ø82 мм), вес и количество взаимодействий между ними, что приводит к увеличению его инерционности и уменьшению точности.
1.5. Большая сила ощупывания (50, 75 и 150 грамм) измерительной головки ДК приводит к деформациям измеряемой поверхности и уменьшению точности измеряемой координаты, особенно в случае измерения поверхностей с невысокой твердостью.
1.6. Различные принципы, заложенные в двух датчиках, действующих независимо и в то же время дополняющих друг друга при определении величины координаты изделия по каждой отдельной оси координат, требуют дополнительных условий для их совместимости (соотносительности к эталону длины). Сопряжение двух разных датчиков требует их точной установки относительно друг друга. Неточность в установке приводит к уменьшению точности системы при определении каждой координаты в отдельности и при определении трех координат в целом.
2. Большой вес КИМ, связанный с необходимостью использования точной каменной направляющей по координате Х, установленной на мосту, приводит к увеличению инерции системы и, как следствие, к уменьшению точности машины.
Задачей предложенного изобретения является обеспечение увеличения точности определения координат объекта при измерениях с помощью КИМ и уменьшение веса моста, что также приведет к увеличению точности.
Задача решается тем, что в координатно-измерительной машине, содержащей измерительный стол с боковыми параллельными стенками по его противоположным краям, подвижный мост, опирающийся на боковые стенки с возможностью перемещения по координате Y, три датчика линейных перемещений, каждый из которых регистрирует свою координату и которые установлены с возможностью взаимно перпендикулярного перемещения по трем координатам X, Y, Z, а также датчик касания со щупом, устройства, одно из которых установлено на мосту и управляет передвижением датчика по координате X, другое установлено на одной боковой стенке измерительного стола и управляет передвижением датчика по координате Y, установленного на этой же боковой стенке, и датчики по координатам Х и Z установлены на подвижном мосту, а датчик касания со щупом, который жестко с ним связан, установлен на мосту с возможностью перемещения вдоль координаты Z, и каждый датчик линейных перемещений имеет свою измерительную решетку, считывающую головку с кареткой, содержащей индикаторную решетку, и направляющую, причем считывающая головка датчика линейных перемещений по координате Х жестко связана со считывающей головкой датчика линейных перемещений по координате Z, и обе считывающие головки имеют возможность перемещения вдоль направления измерительной решетки датчика линейных перемещений по координате X, и считывающая головка по координате Y жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, и направляющая по Х и по Y состоит из двух взаимно перпендикулярных плоскостей, жестко связанных между собой, а щуп установлен в датчике касания таким образом, что он имеет возможность касания с измерительным столом, новым является то, что введен второй датчик линейных перемещений по координате Y, установленный на второй боковой стенке измерительного стола, параллельно первому известному датчику линейных перемещений по координате Y и в пределах его апертуры, и его считывающая головка жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, и датчик касания выполнен в виде датчика линейных перемещений, и одной из плоскостей направляющей в датчиках линейных перемещений, является плоскость измерительной решетки со штрихами, а вторая плоскость направляющей выполнена в виде стеклянной подложки, а датчик линейных перемещений по координате Z и датчик касания обладают общей измерительной решеткой, и общей направляющей, и считывающая головка датчика касания закреплена на измерительной решетке датчика линейных перемещений по координате Z после его считывающей головки со стороны расположения щупа, и щуп жестко связан с кареткой датчика касания, и они имеют возможность перемещения относительно считывающей головки датчика касания, и каретка в нижнем положении опирается на упор, выполненный в виде шарика, жестко закрепленного на площадке, прикрепленной к торцу направляющей датчика линейных перемещений по координате Z, и плоскость площадки перпендикулярна направлению перемещения этого датчика и не пересекает щуп, а подвижный мост выполнен в виде стеклянного швеллера, две плоскости которого являются направляющей датчика линейных перемещений по координате X, а другая вновь введенная подложка стеклянного швеллера перпендикулярна первой и жестко с ней связана.
Такое конструктивное выполнение КИМ позволяет определить координату точки на измеряемой поверхности с более высокой точностью и с малой деформацией поверхности за счет:
- введения второго измерительного датчика линейных перемещений по координате Y,
- совместимости принципов совместно действующих двух датчиков: датчика линейных перемещений и датчика касания благодаря использованию одного и того же измерительного элемента - измерительной дифракционной решетки по координате Z и одинакового принципа считывания информации для обоих датчиков,
- уменьшения веса моста из-за использования стеклянных направляющих измерительного датчика по координате Х и стеклянного швеллера, одна из сторон которого служит подложкой, являющаяся второй плоскости направляющей датчика линейных перемещений по координате X, а вторая сторона, дополнительно введенная стеклянная подложка, перпендикулярна первой и жестко с ней связана.
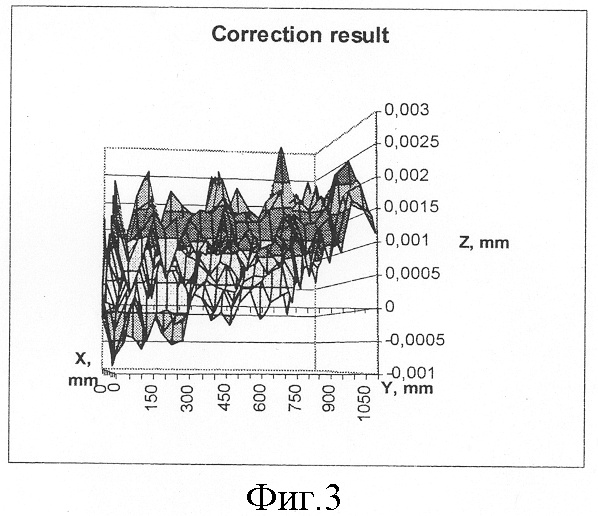
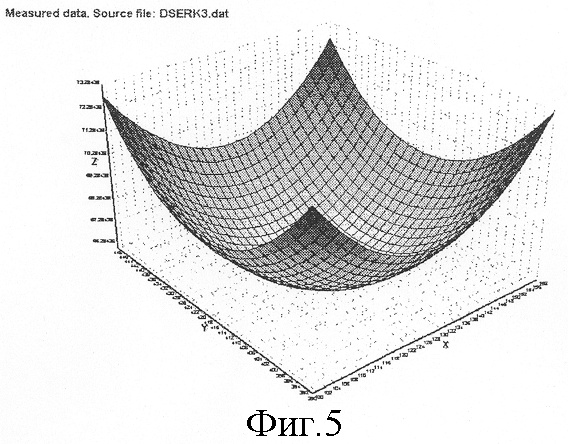
На фиг.1 (а, б) изображен конкретный пример конструктивного решения заявляемого устройства КИМ для измерения координат изделия и дан вид этого устройства. На фиг.2 дана фотография конкретного исполнения заявляемой КИМ, а на фиг.3 представлены данные измерения отклонения неплоскостности измерительного стола КИМ с коррекцией систематических ошибок. На фиг.4 представлена фотография торроидального зеркала, а на фиг.5 - результаты его обмера на КИМ.
В соответствии с представленными фигурами и формулой изобретения, КИМ содержит (фиг.1 (а, б)); щуп 1 (см. узел А); измерительный стол 2; голографические датчики линейных перемещений по X, Y1, Y2, Z и ДК, каждый из которых имеет свою измерительную решетку Ризх 3, Ризу1 4, Ризz2 5 Ризу2 5 и Ризz 6; двигатели 7, 8 и 9, установленные соответственно по координатам X, Y1, и Z; считывающие головки Счх 10, Счу1-11 и Счу2-12 и Счz-13 и считывающую головку датчика касания Счдк 14; боковые стенки 15 и 16 измерительного стола 2; шариковинтовую пару 17 по координате Х и шариковинтовую пару 18 по координате Y1; узел крепления Счх и Счz 19; первую плоскость направляющей 3, 4, 5 и 6, которая соответствует плоскости расположения штрихов измерительных решеток по X, Y1, Y2 и Z, и вторую плоскость направляющей 20, 21 (см. узел Б), 22 и 23; индикаторную решетку Риндк 24 считывающей головки датчика касания - (узел А); каретку фиксации 25 индикаторной решетки Риндк 24 датчика касания; шарик 26 для упора каретки фиксации 25 индикаторной решетки Риндк 24 датчика касания - (см. узел А); подшипники 27 каретки фиксации 25; подшипники 28 считывающей головки Счz-13; мост в виде стеклянного швеллера, имеющий одну плоскость 3, вторую плоскость 20, которая совпадает со второй плоскостью направляющей датчика линейных перемещений по координате Х, и третью плоскость 29; стеклянная платформа 30 для упора шарика 26 каретки фиксации 25 имеет площадку с плоскостью со стороны упора шарика 26, перпендикулярной направлению перемещения этого датчика и не пересекающей щуп 1. Плоскости 3, 20 и 29 образуют швеллер моста. Для жесткости моста в швеллере моста могут присутствовать связующие угольники.
В каждой считывающей головке имеются свои индикаторные решетки с частотой штрихов, совпадающей с частотой соответствующих измерительных решеток, имеются также источники излучения и подшипники, позволяющие индикаторным решеткам катиться по двум плоскостям направляющей относительно измерительных решеток или, как в случае измерительного датчика по координате Z, наоборот, измерительной решетке 6 катиться относительно индикаторной решетки, которая зафиксирована в считывающей головке Счz 13.
Таким образом,
1) одной из конструктивной особенностью координатно-измерительной машины является то, что по координате Y впервые устанавливаются одновременно два датчика, содержащие соответственно две измерительные решетки (Ризу1 4, Ризу2 5) со своими считывающими головками (Счу1 11, Счу2 12). Эти два датчика расположены симметрично относительно подвижного моста и по его краям. Причем двигатель 8 установлен лишь с одной стороны моста и перемещает головку только одного из этих двух датчиков - Y1, т.к. осуществлять синхронное движение двух двигателей по Y1 и по Y2 с точностью до нескольких десятков нанометров практически невозможно. В связи с этим будет наблюдаться гистерезисное запаздывание каретки считывающей головки измерительного датчика по координате Y2. С целью, корректировки этого фактора по этой координате Y2 устанавливается второй датчик линейных перемещений со своей измерительной решеткой Ризу2 5 и со своей направляющей, первая плоскость которой совпадает с плоскостью измерительной решетки 5, а вторая ее плоскость - 22;
2) вторая конструктивная особенность КИМ связана с тем, что совмещены принципы действия датчика линейных перемещений по Z и ДК (т.к. ДК выполнен также в виде датчика линейных перемещений на базе дифракционных решеток). Более того, у них одна и та же измерительная решетка 6 и одна и та же направляющая, состоящая их двух плоскостей 5 и 22;
3) в отличие от всех известных конструкций в ней используются датчики линейных перемещений, в каждом из которых направляющей служат две стеклянные пластины, одна из которых - измерительная решетка, а вторая - подложка, жестко с ней связанная. Отклонение от прямолинейности стеклянной направляющей не более ±1,2 мкм на 500 мм, что весьма трудно получить при обработке камня или металла, используемых в известных конструкциях КИМ в качестве направляющих, в том числе и у аналога и прототипа.
4) подвижный мост КИМ также стеклянный и изготовлен в виде швеллера со сторонами 3, 20 и 29. Благодаря этому он обладает не только легкостью, но и жесткостью, что приводит к уменьшению прогиба моста из-за закрепленных на нем датчиков линейных перемещений по координатам X, Z и ДК и тем самым к уменьшению систематических ошибок при обмере изделия на данном КИМ.
Принцип работы устройства заключается в следующем.
Опускается щуп 1 на измерительный стол 2 в начале координат и зануливаются показания всех датчиков линейных перемещений X, Y1, Y2, Z и ДК.
Устанавливается измеряемое изделие на измерительный стол 2 и подводится щуп 1 к нему в точку, где необходимо измерять его координаты. Щуп 1 подводится к нужной точке изделия с помощью двигателей 7, 8 и 9 и стандартной программы, позволяющей по оптимальному пути подвести щуп в 3-координатном пространстве к данной точке. При этом считывающие головки Счу1 -11, Счу2 -12 датчиков линейных перемещений Y1 и Y2, установленных на боковых стенках 15 и 16 измерительного стола 2, закрепленные по краям моста (швеллера), перемещаются вдоль измерительных решеток Ризуч1 4 и Ризу2 5, а считывающие головки Счz 10 и Счz 13, закрепленные на узле 19, перемещаются вдоль измерительной решетки Ризх 3. Ризz -6 и считывающая головка Счдк 14, закрепленная на ней (см. узел А на фиг.1), перемещаются вдоль индикаторной решетки считывающей головки Счz 13, закрепленной на узле 19.
Все перемещения считывающих головок и измерительных решеток относительно друг друга в каждом отдельном датчике X, Y1, Y2, Z и ДК осуществляются с использованием подшипников. Направляющая каждого датчика состоит из двух стеклянных взаимно перпендикулярных плоскостей, склеенных между собой, одна из которых совпадает с плоскостью измерительной решетки данного датчика, а вторая - с плоскостью соответствующей подложки 20, 21, 22 и 23.
Направляющая датчика по координате Z одновременно является и направляющей ДК (см. узел А).
В считывающей головке каждого датчика линейных перемещений используется сопряжение двух дифракционных решеток, из которых одна измерительная Риз с длиной, равной измеряемой длине, а другая, небольшая, индикаторная Рин (см. фиг.1 - узел А, где показана Риндк-23), причем конструкция всех считывающих головок одинаковая.
При освещении каждой пары решеток (измерительной и индикаторной) световым потоком от источника излучения, расположенного в каждой считывающей головке, на выходе решеток появляются интерференционные полосы, которые возникают в результате интерференции пучков различных порядков дифракции этих двух решеток. Шаг и форма интерференционных полос зависит от параметров решеток: частоты и от угла между штрихами решеток (т.е. от взаимного расположения их штрихов). В основном интерференционные полосы в датчиках представляют собой семейство широких прямых линий. Перемещение измерительной решетки относительно индикаторной в каждой считывающей головке датчиков приводит к синхронному перемещению этих полос в одном направлении, а в случае изменения направления движения решеток (реверса) - к синхронному реверсу полос.
В поле интерференционных полос устанавливается матрица фотоприемников. Перемещения полос преобразуются с помощью фотоприемников в электрические сигналы. Эти электрические сигналы обрабатываются в стандартных электронных логических блоках с целью получения цифровой информации об измеряемом перемещении. По координате Z на сумматор "С" попадают цифровые значения от двух датчиков Z и ДК. При перемещении Ризz 6 по направлению к измеряемой точки изделия, благодаря двигателю 9 и подшипникам 28, считывающая головка Счz 13 вырабатывает соответствующие электрические сигналы, которые обрабатываются в своем электронном логическом блоке с целью получения цифровой информации, после чего они попадают на сумматор "С" все время - до и после касания. В считывающей головке датчика ДК движение муаровых полос происходит лишь после касания щупа 1 с поверхностью изделия и прекращается в момент остановки всех датчиков. До касания каретка ДК - 25 с индикаторной решеткой Риндк-24 покоится относительно Ризz-6, упираясь в шарике 26. В момент касания щупом 1 измеряемой точки поверхности изделия каретка-25, жестко связанная с Риндк-24, начинает перемещаться вдоль Ризz 6 с помощью подшипников 27 в обратном направлении относительно Ризz 6. При этом штрихи каждой пары решеток обоих считывающих головок (Счz-13 и Счдк-14) по координате Z не меняют своего расположения относительно друг друга (наклон) при их движении и не выходят из сферы взаимного перекрытия.
Таким образом, цифровые значения от датчика ДК начинают попадать на сумматор "С" только после касания и они обладают противоположным знаком, нежели данные от датчика Z, в результате чего происходит их вычитание. Благодаря этому, в дальнейшем, до остановки движения Ризz 6 сумматор "С" будет выдавать фактически одну и ту же величину, т.е. координату Z в точке касания. Очень важный момент, что съем координат с датчика по координате Z и ДК до попадания на сумматор проходит одни и те же преобразования, поскольку у этих двух датчиков один и тот же измерительный элемент. Это уменьшает погрешности при определении координат. После соприкосновения щупа с поверхностью изделия Счдк 18 вырабатывает управляющий импульс на остановку всех двигателей КИМ.
В связи с тем, что в основе измерительного датчика по координате Z и датчика касания ДК лежит операция вычитания величин координат, получаемых от двух считывающих головок датчика линейных перемещений по координате Z и ДК, то систему из датчика Z и ДК можно назвать дифференциальным датчиком касания. Причем его применение в КИМ позволяет не ловить единственный мгновенный момент касания, поскольку этот момент как раз может и не отражать правильно величину координаты касания, скажем, хотя бы из-за удара, когда имеет место упругая деформация щупа и поверхности. Координата касания легко уловима на протяжении целого интервала времени от момента касания до остановки двигателя. В данном конкретном исполнение ДК обладал следующими характеристиками:
Координатно-измерительная машина в конкретном варианте была обмеряемым объемом 500×500×200 куб.мм.
В связи с тем, что в предложенной КИМ по координате Y устанавливаются одновременно два датчика, содержащих соответственно две измерительные решетки Ризу1 4 и Ризу2 5 со своими считывающими головками Счу1 11 и Счу2 12, то расчет истинной координаты Y осуществляется программно и является функцией положения координаты Х оси датчика Z, измеряющего координату Z, и значений Y1 и Y2, отсчитанных по измерительным решеткам датчиков Y1 и Y2, т.е.

где величина L равна расстоянию между шкалами Y1 и Y2.
Проведенные исследования предложенных направляющих датчиков линейных перемещений /4/ показали точность выше ±1 мкм на длине 500 мм. Для измерений по координате Z использовался датчик линейных перемещений с измерительной голографической дифракционной решеткой /5/ и дифференциальный датчик касания. Высокая степень прямолинейности направляющих открывает возможность осуществления программно устранения систематических ошибок в реальном времени. Это позволяет увеличить точность КИМ в 2-3 раза.
Т.о. указанные характеристики являются прорывным решением при создании подобных координатно-измерительных машин.
В конкретном исполнении КИМ (фиг. 2,4) обладает следующими характеристиками:
1 - точность КИМ, мкм
Q=±(0,2+2,5L/550),
На вышеуказанной КИМ-е (см. фиг.2, где дана ее фотография) проводились следующие измерения:
1 - определялось отклонения от плоскостности измерительного стола (2) КИМ с учетом ее систематических ошибок. Результаты приведены на графике фиг.3;
2 - график измерения координат торроидального зеркала и фотография торроидального зеркала (фиг.5 и 4).
Таким образом, в данном конкретном исполнении КИМ цель достигается тем, что:
1 - используются два датчика Y1 и Y2 с целью более точного определения координаты Y (см. фиг.2);
2 - используются однотипные датчики (в том числе и датчик касания) по всем координатам (с одинаковыми высокоточными высокоразрешающими измерительными и индикаторными дифракционными решетками). Это изначально делает их максимально совместимыми по всем параметрам, в том числе по точности и по разрешению без использования дополнительных методов для их совместимости и масштабирования;
3 - использование высокоточных стеклянных направляющих для всех датчиков приводит к увеличению точности измерении координат. В данном конкретном случае использовались по всем координатам стеклянные направляющие, полученные путем склейки измерительных решеток с подложками /4/. Опытный образец таких направляющих, изготовленный по особой технологии, показал точность отклонения от прямолинейности не больше ±1,7 микрон/500 мм;
4 - использование общих стеклянных направляющих по координате Z и ДК позволяет создать измерительную головку ДК малого веса. Вес датчика касания с поверхностью зависит не от веса крупногабаритных деталей ДК, как в аналоге и прототипе, а от веса малогабаритных деталей каретки 25, Риндк-24 и щупа 1, что приводит к уменьшению деформации измеряемой поверхности в точке касания благодаря малой силе ощупывания;
5 - датчик касания содержит в качестве элемента касания (контакта) миниатюрный, малоинерционный элемент - индикаторную дифракционную решетку, жестко связанную со щупом, поэтому временной отклик датчика касания в момент касания практический мгновенный и определяется разрешающей способностью измерительной системы обеих считывающих головок (по Z и ДК), которая в настоящее время одинаковая для этих и для всех используемых в заявляемой КИМ датчиков и достигает 0,01 мкм. Это дает возможность сохранить высокую точность и при измерениях с высокими скоростями;
6 - стеклянные направляющие по Х и Z позволяют сконструировать более легкий мост в виде стеклянного швеллера (3, 20, 29), что приводит к уменьшению давления на измерительный стол и к уменьшению погрешности системы;
7 - во всех датчиках и измерительные решетки (3, 4, 5, 6), и направляющие (20, 21, 22 и 23) обладают одинаковым коэффициентом температурного расширения, что приводит к увеличению точности системы; точность КИМ можно дополнительно увеличить, используя стекло с малым коэффициентом температурного расширения порядка 2.10-7 мкм/м.
Литература
1. "MicroVal 343" Personal Manual CMM (Технические условия / Specification), A Brown&Sharpe Company.
2. Измерительный датчик касания МР3, Rensihaw. Паспорт МР3.
3. Паспорт MP3 "Crysta Plus 504", (Технические условия / Specification), A Mitutoyo Company,
4. Турухано Б.Г., Турухано Н. "Датчик линейных перемещений". Патент РФ №2197713, приор, от 07.08.2000 г.
5. Горелик В.П., Николаев С.Н., Турухано Б.Г., Турухано Н. "Устройство для фазированного соединения дифракционных голографических решеток". Патент РФ №673018, приор, от 06.06.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНЫЙ ДАТЧИК КАСАНИЯ НА ДИФРАКЦИОННЫХ РЕШЕТКАХ | 2004 |
|
RU2276772C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ ПОВЕРХНОСТИ | 2004 |
|
RU2287776C2 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2426972C2 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2197713C2 |
| ИЗМЕРИТЕЛЬНАЯ МИКРОМЕТРИЧЕСКАЯ ГОЛОВКА "ТУБОР" | 1992 |
|
RU2032142C1 |
| Нанодлиномер голографический | 2021 |
|
RU2782964C1 |
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 2011 |
|
RU2465493C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2013 |
|
RU2534378C1 |
| УСТРОЙСТВО ДЛЯ СИНТЕЗА ДЛИННЫХ ГОЛОГРАФИЧЕСКИХ ДИФРАКЦИОННЫХ РЕШЕТОК | 1982 |
|
RU1052095C |
| Голографическая дифракционная решетка | 1985 |
|
SU1656483A1 |
Изобретение относится к измерительной технике, а именно к приборам для определения координат поверхности измеряемой детали. Координатно-измерительная машина содержит измерительный стол, подвижный мост, четыре датчика линейных перемещений по координатам X, Y1, Y2 и Z, а также датчик касания со щупом с возможностью перемещения вдоль координаты Z. Каждый датчик линейных перемещений имеет свою измерительную решетку, считывающую головку с кареткой, содержащей индикаторную решетку, и направляющую. Направляющая всех датчиков линейных перемещений состоит из двух взаимно перпендикулярных плоскостей, жестко связанных между собой, одной из плоскостей направляющей является плоскость измерительной решетки со штрихами, а вторая плоскость направляющей выполнена в виде стеклянной подложки. Датчик касания выполнен в виде датчика линейных перемещений. Датчик линейных перемещений по координате Z и датчик касания обладают общей измерительной решеткой и общей направляющей, и считывающая головка датчика касания закреплена на измерительной решетке датчика линейных перемещений по координате Z. Щуп жестко связан с кареткой датчика касания. Каретка датчика касания в нижнем положении опирается на упор, выполненный в виде шарика, жестко закрепленного на площадке, прикрепленной к торцу направляющей датчика линейных перемещений по координате Z. Подвижный мост выполнен в виде стеклянного швеллера. Техническим результатом является обеспечение увеличения точности определения координат объекта при измерениях с помощью КИМ и уменьшение веса моста. 5 ил.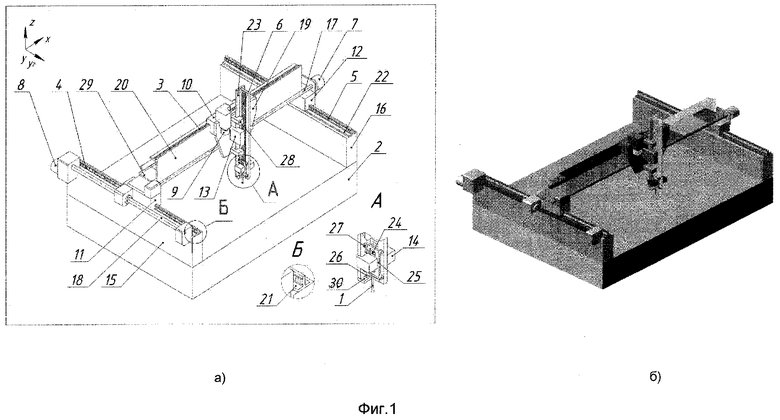
Координатно-измерительная машина, содержащая измерительный стол с боковыми параллельными стенками по его противоположным краям, подвижный мост, опирающийся на боковые стенки с возможностью перемещения по координате Y, три датчика линейных перемещений, каждый из которых регистрирует свою координату и которые установлены с возможностью взаимно перпендикулярного перемещения по трем координатам X, Y, Z, а также датчик касания со щупом, устройства, одно из которых установлено на мосту и управляет передвижением датчика по координате X, другое установлено на одной боковой стенке измерительного стола и управляет передвижением датчика по координате Y, установленного на этой же боковой стенке, и датчики по координатам Х и Z установлены на подвижном мосту, а датчик касания со щупом, который жестко с ним связан, установлен на мосту с возможностью перемещения вдоль координаты Z, и каждый датчик линейных перемещений имеет свою измерительную решетку, считывающую головку с кареткой, содержащей индикаторную решетку, и направляющую, причем считывающая головка датчика линейных перемещений по координате Х жестко связана со считывающей головкой датчика линейных перемещений по координате Z, и обе считывающие головки имеют возможность перемещения вдоль направления измерительной решетки датчика линейных перемещений по координате X, и считывающая головка по координате Y жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, и направляющая по Х и по Y состоит из двух взаимно перпендикулярных плоскостей, жестко связанных между собой, а щуп установлен в датчике касания таким образом, что он имеет возможность касания с измерительным столом, отличающаяся тем, что введен второй датчик линейных перемещений по координате Y, установленный на второй боковой стенке измерительного стола, параллельно первому известному датчику линейных перемещений по координате Y в пределах его апертуры, и его считывающая головка жестко связана с подвижным мостом и имеет возможность перемещения вдоль своей измерительной решетки по координате Y, датчик касания выполнен в виде датчика линейных перемещений, и одной из плоскостей направляющей в датчиках линейных перемещений является плоскость измерительной решетки со штрихами, а вторая плоскость направляющей выполнена в виде стеклянной подложки, а датчик линейных перемещений по координате Z и датчик касания обладают общей измерительной решеткой и общей направляющей, и считывающая головка датчика касания закреплена на измерительной решетке датчика линейных перемещений по координате Z после его считывающей головки со стороны расположения щупа, и щуп жестко связан с кареткой датчика касания с возможностью перемещения относительно считывающей головки датчика касания, и каретка в нижнем положении опирается на упор, выполненный в виде шарика, жестко закрепленного на площадке, прикрепленной к торцу направляющей датчика линейных перемещений по координате Z, плоскость площадки перпендикулярна направлению перемещения этого датчика и не пересекает щуп, а подвижный мост выполнен в виде стеклянного швеллера, две плоскости которого являются направляющей датчика линейных перемещений по координате X, а другая вновь введенная подложка стеклянного швеллера перпендикулярна первой и жестко с ней связана.
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Координатная измерительная машина | 1976 |
|
SU684282A1 |
| Устройство для измерения линейных размеров деталей | 1980 |
|
SU905632A1 |
| Координатная измерительная машина | 1980 |
|
SU947616A1 |
| Измерительная головка для координатных измерительных машин | 1980 |
|
SU968579A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2197713C2 |

