Настоящее изобретение относится к компактному, легкому и менее дорогому типу колебательного привода с малыми вибрациями.
Известен колебательный привод, имеющий подвижную часть и электромагнитный приводной механизм для возвратно-поступательного приведения в действие подвижной части посредством электромагнитной силы. Колебательный привод используется в приводном механизме электробритвы, электрической зубной щетки или аналогичного устройства.
В выкладке японской патентной заявки номер 2002-199689 (D1) раскрыт линейный осциллятор. Линейный осциллятор - это пример колебательного привода, и он оснащен возвратно-поступательной подвижной частью, корпусом для размещения подвижной части и нагрузкой для управления амплитудой, которая подвижно поддерживается корпусом. В линейном осцилляторе подвижная часть и нагрузка для управления амплитудой возвратно-поступательно приводятся в действие на резонансной частоте линейного осциллятора или частоте, близкой к резонансной частоте.
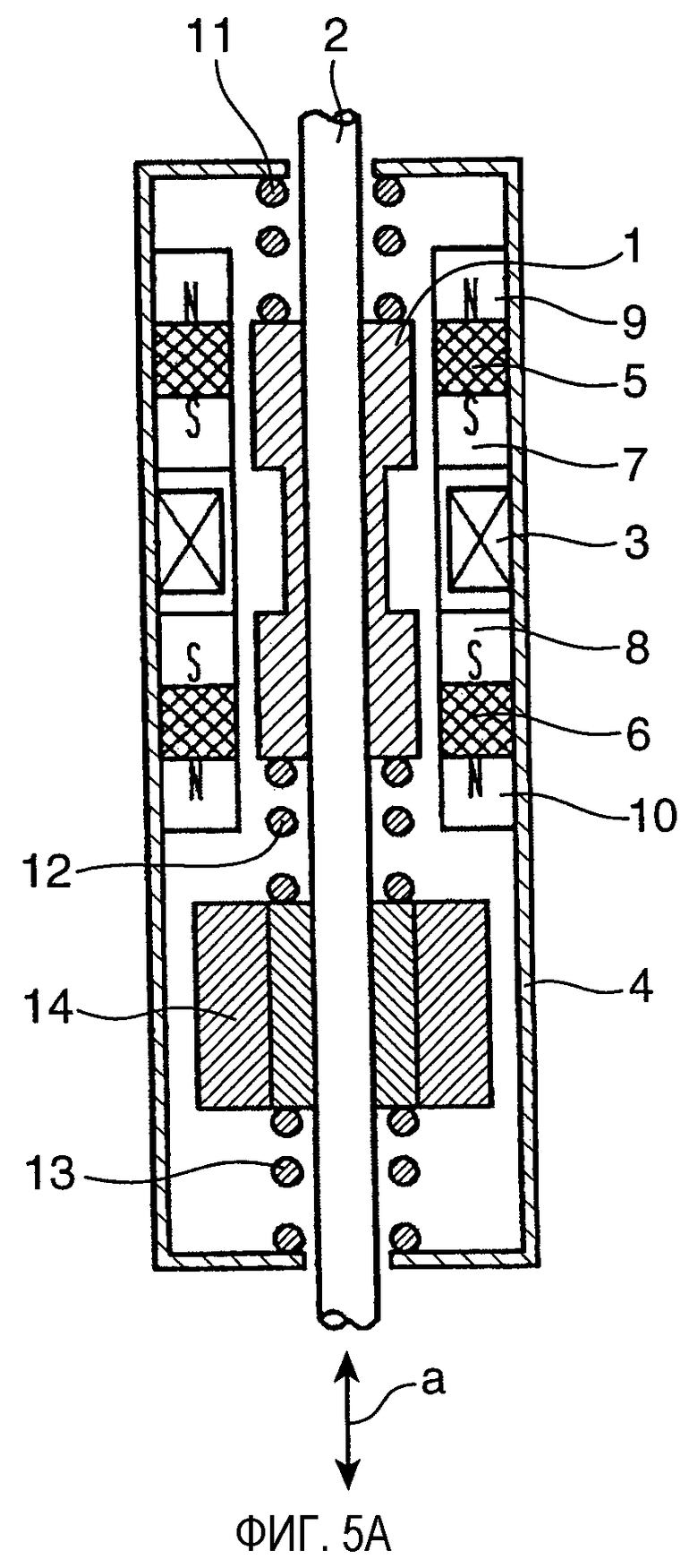
Примерная конструкция линейного осциллятора показана на фиг.5A. Подвижная часть включает в себя плунжер 1 и выходной вал 2. Плунжер 1 изготовлен из магнитного материала, такого как стальной материал, и имеет большой диаметр по аксиально-противоположным концевым частям и небольшой диаметр по аксиально-центральной части. Выходной вал 2 идет аксиально через плунжер 1, и плунжер прикреплен к выходному валу 2. Кольцеобразная электромагнитная катушка установлена вокруг плунжера 1.
Подвижная часть помещена в экранирующий корпус 4. Электромагнитная катушка 3 прикреплена к внутренней стенке экранирующего корпуса 4. Кольцевые постоянные магниты 5 и 6 соответственно размещены по аксиально-противоположным сторонам электромагнитной катушки 3 симметрично друг к другу относительно электромагнитной катушки 3. Кольцевое внутреннее ярмо 7 магнита предусмотрено между постоянным магнитом 5 и электромагнитной катушкой 3, а кольцевое внутреннее ярмо 8 магнита предусмотрено между постоянным магнитом 6 и электромагнитной катушкой 3. Кольцевое внешнее ярмо 9 магнита предусмотрено в положении, противоположном ярму 7 магнита относительно постоянного магнита 5, а кольцевое внешнее ярмо 10 предусмотрено в положении, противоположном ярму 8 магнита относительно постоянного магнита 6. Электромагнитная катушка 3, постоянные магниты 5 и 6 и ярма 7, 8, 9 и 10 магнита составляют электромагнитный приводной механизм.
Первая пружина 11 предусмотрена между торцевой поверхностью плунжера 1 и экранирующим корпусом 4. Вторая пружина 12, нагрузка 14 для управления амплитудой и третья пружина 13 предусмотрены в таком порядке между другой торцевой поверхностью плунжера 1 и экранирующим корпусом 4. Пружины 11, 12 и 13 составляют пружинный осциллятор для аксиального приведения подвижной части. Нагрузка 14 для управления амплитудой имеет такую массу, чтобы генерировать заранее определенную амплитуду.
Когда электрический ток не протекает через электромагнитную катушку 3, колебательный привод остается стационарным в положении, показанном на фиг.5A, т.е. в таком положении, чтобы магнитная сила, прилагаемая к плунжеру 1 посредством постоянных магнитов 5 и 6 через ярма 7, 8, 9 и 10 магнита, и сила сжатия пружин 11, 12 и 13 были сбалансированы в отношении друг друга. Когда электрическому току предоставляется возможность протекать через электромагнитную катушку 3 в одном направлении из указанного положения, поток магнитной индукции, генерируемый в одном из постоянных магнитов 5 и 6, ослабляется. При этом плунжер 1 перемещается в направлении постоянного магнита, противоположного постоянному магниту с ослабленным потоком магнитной индукции, против силы сжатия пружины на противоположной стороне к постоянному магниту с ослабленным полем магнитной индукции. Аналогично, когда электрическому току предоставляется возможность протекать через электромагнитную катушку 3 в направлении, противоположном вышеуказанному, плунжер 1 перемещается в направлении, противоположном вышеуказанному, против силы сжатия пружины на противоположной стороне, к постоянному магниту с ослабленным в данный момент потоком магнитной индукции. Таким способом переменный ток в электромагнитной катушке 3 заставляет совершать возвратно-поступательные движения выходной вал 2 с плунжером 1 в аксиальных направлениях, показанных стрелками "a" на фиг.5A, другими словами, колеблет вал 2 и плунжер 1.
Согласно D1 блок приводного механизма (фиг.5A) может рассматриваться в качестве пружинного осциллятора из-за предоставления пружин 11, 12 и 13 посредством ориентирования в аксиальном направлении подвижной части, включающей в себя плунжер 1 и выходной вал 2, а также нагрузки 14 для управления амплитудой. Кроме того, согласно D1 возможно получить две частоты, т.е. резонансные частоты или собственные частоты f1, f2 как решения уравнения движения, представляющего свободные колебания подвижной части и нагрузки 14 для управления амплитудой как материальные точки в пружинном осцилляторе на основе массы подвижной части, нагрузки 14 для управления амплитудой и части крепления колебательного привода, жесткостей пружин 11, 12 и 13, коэффициента ослабления и аналогичного параметра. Тип колебаний на собственной частоте f1 первого порядка, т.е. более низкого порядка - это тип колебаний, при котором подвижная часть и нагрузка 14 для управления амплитудой перемещаются с фазами, идентичными друг другу. Тип колебаний на собственной частоте f2 второго порядка, т.е. более высокого порядка - это тип колебаний, при котором подвижная часть и нагрузка 14 для управления амплитудой перемещаются с фазами, противоположными друг другу.
Когда ток с частотой, близкой к собственной частоте f2 второго порядка из собственных частот f1 и f2, подается в электромагнитную катушку 3, подвижная часть совершает аксиальные возвратно-поступательные движения и в то же время нагрузка 14 для управления амплитудой передается с фазой, противоположной фазе подвижной части. Следовательно, нагрузка 14 для управления амплитудой подавляет силу инерции подвижной части, и аналогично, подвижная часть подавляет силу инерции нагрузки 14 для управления амплитудой. Кроме того, в этом режиме подвижная часть и нагрузка 14 для управления амплитудой как две материальные точки перемещаются таким образом, что сила инерции подвижной части и нагрузки 14 для управления амплитудой сбалансированы друг с другом. Поскольку эффект подавления сил инерции посредством противодействия подвижной части и нагрузки 14 для управления амплитудой большой, сила, которая должна быть передана от двух материальных точек, т.е. подвижной части и нагрузки 14 для управления амплитудой, фиксирующей части, минимизирована. Как результат, колебание линейного осциллятора минимизировано. Другими словами, реализовано приведение в действие с меньшей амплитудой колебания.
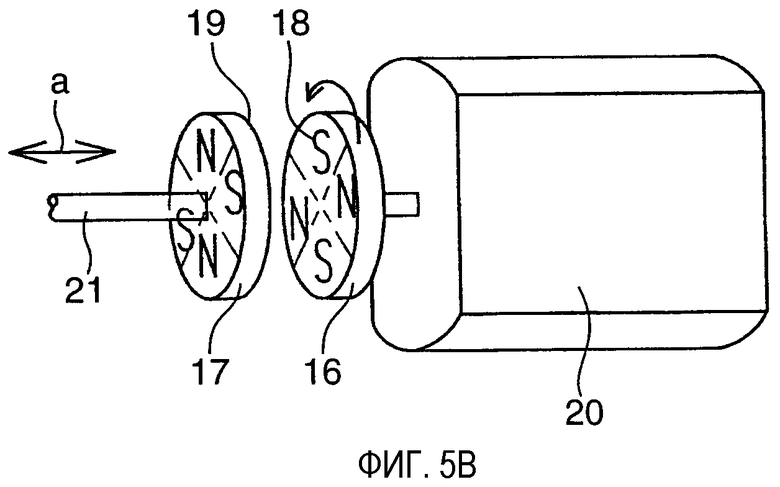
В выкладке японской патентной заявки номер 62-65779 (D2) раскрыт колебательный привод ("устройство вибратора" в D2) (фиг.5B).
Колебательный привод имеет поворотный диск 16, прикрепленный к выходному валу 21 электродвигателя 20, и аксиально-подвижной диск 17, который прикреплен к концевой части выходного вала 21 и является аксиально-подвижным, при этом поворотный диск 16 и аксиально-подвижной диск 17 аксиально противоположны друг другу. Постоянные магниты 18 и 19 присоединены к соответствующим поверхностям дисков 16 и 17, противоположных друг к другу. Множественные полюса (на фиг.5B показаны четыре полюса, состоящие из двух северных полюсов и двух южных полюсов) попеременно размещены по окружности одного из постоянных магнитов 18 и 19.
В таком колебательном приводе электродвигатель 20 вращательно приводит в действие поворотный диск 16, чтобы сформировать силы магнитного притяжения и отталкивания попеременно между поворотным диском 16 и аксиально-подвижным диском 17. Силы заставляют совершать возвратно-поступательные движения аксиально-подвижной диск 17 и выходной вал 21 как одно целое в аксиальных направлениях стрелок "a" (фиг.5B), другими словами, колебаться диск 17 и вал 21.
Колебательный привод согласно D1 включает в себя нагрузку 14 для управления амплитудой для подавления колебания независимо от подвижной части. Следовательно, привод требует пространства для нагрузки 14 для управления амплитудой, что препятствует миниатюризации колебательного привода. Кроме того, добавление нагрузки 14 для управления амплитудой увеличивает вес и стоимость, что затрудняет создание легкого и недорогого привода.
Колебательный привод согласно D2 не включает в себя нагрузку для управления амплитудой, но имеет проблему колебания привода, которая должна быть решена.
Технической задачей настоящего изобретения является создание компактного, легкого и менее дорогого типа колебательного привода с малыми вибрациями.
Поставленная задача согласно изобретению решена путем создания колебательного привода, использующего электромагнитную силу. Колебательный привод содержит подвижную часть, электромагнитный приводной механизм для совершения возвратно-поступательных движений подвижной части в определенном направлении посредством электромагнитной силы и основной корпус для размещения подвижной части и электромагнитного приводного механизма таким образом, чтобы обеспечить возможность совершения возвратно-поступательных движений подвижной части и электромагнитного приводного механизма в направлении, идентичном определенному направлению, при этом электромагнитный приводной механизм и подвижная часть совершают возвратно-поступательные движения в основном корпусе посредством приведения в действие электромагнитным приводным механизмом с фазами, противоположными друг другу.
С помощью колебательного привода электромагнитный приводной механизм, который совершает возвратно-поступательные движения с фазой, противоположной фазе подвижной части, выполняет функцию нагрузки для управления амплитудой, а также принудительное совершение возвратно-поступательных движений подвижной частью. Совершение возвратно-поступательных движений электромагнитным приводным механизмом позволяет подавить колебания и устранить необходимость в дополнительном предоставлении нагрузки для управления амплитудой для подавления колебаний. Даже если нагрузка для управления амплитудой добавлена, она допускается как небольшая и легкая. Таким образом, конструкция позволяет уменьшить размер, вес и стоимость привода как целого.
Эти и другие цели, признаки и преимущества настоящего изобретения станут ясными из нижеследующего описания предпочтительных вариантов осуществления со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - поперечный разрез колебательного привода, согласно первому варианту осуществления изобретения;
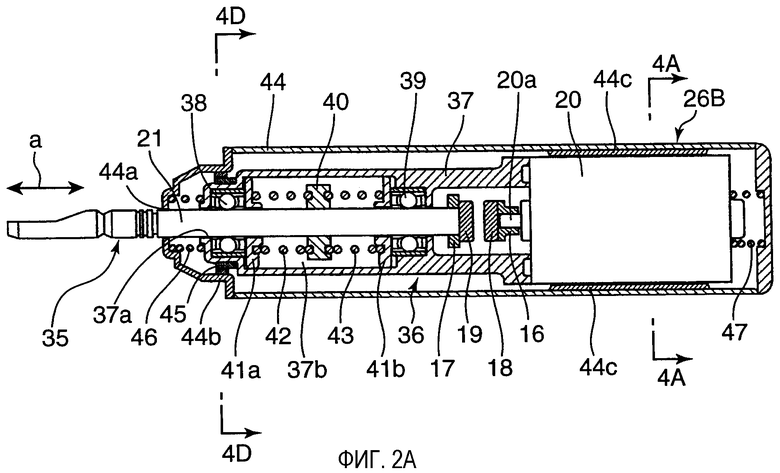
Фиг.2A - поперечный разрез колебательного привода, согласно второму варианту осуществления изобретения;
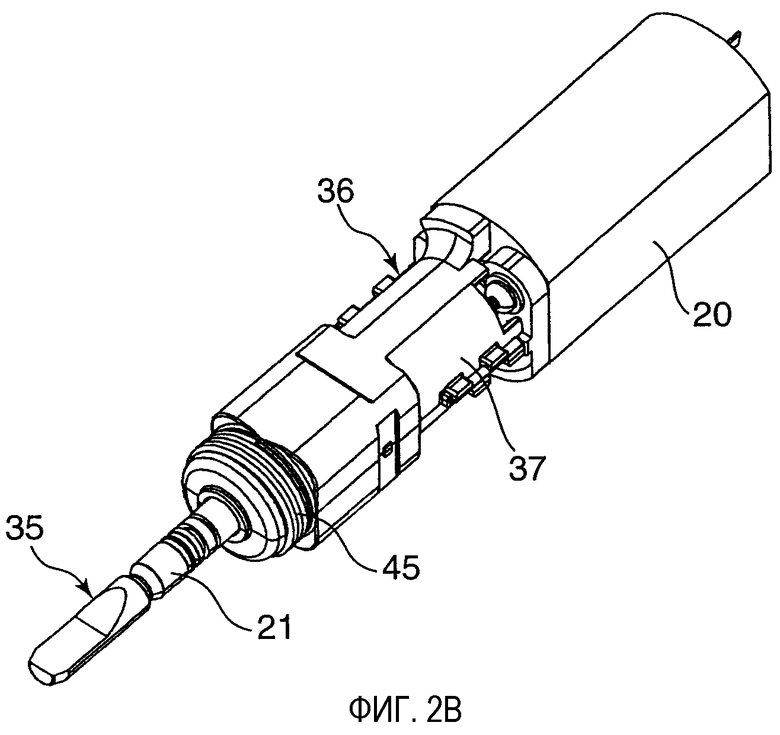
Фиг.2B - общий вид подвижной части и электромагнитный приводной механизм колебательного привода согласно изобретению;
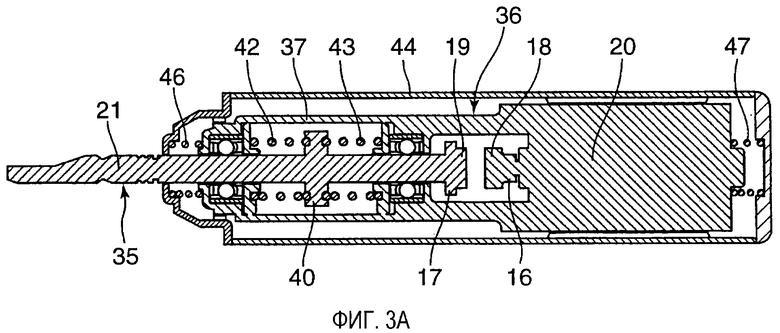
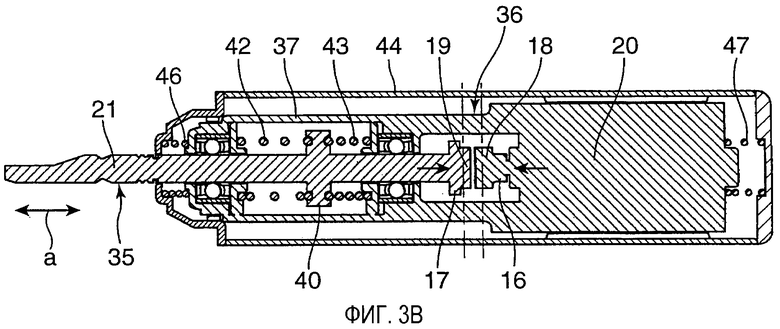
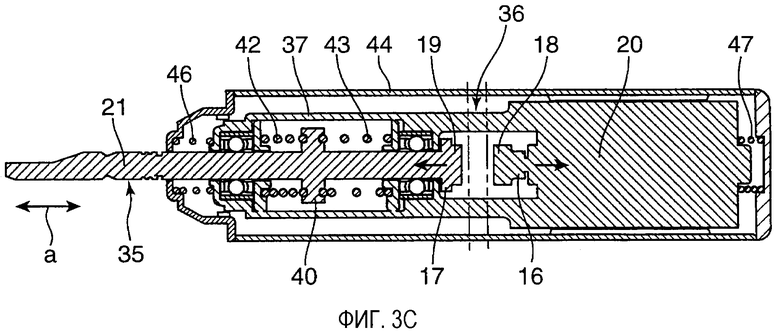
Фиг.3A-3C - поперечные разрезы, иллюстрирующие состояния, в которых подвижная часть и электромагнитный приводной механизм совершают возвратно-поступательные движения с фазами, противоположными друг другу согласно изобретению;
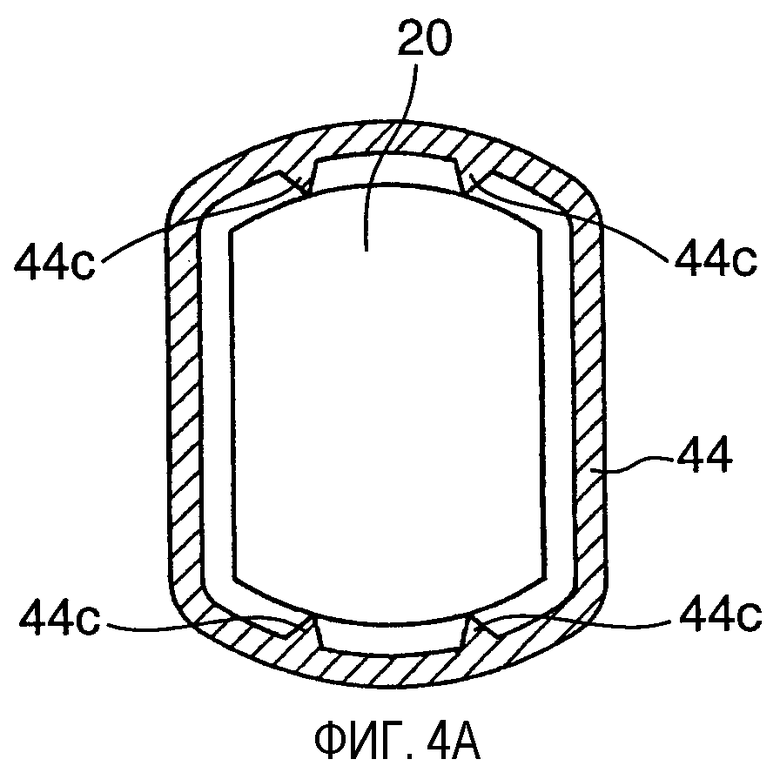
Фиг.4A - поперечный разрез по линии 4A-4A на фиг.2A согласно изобретению;
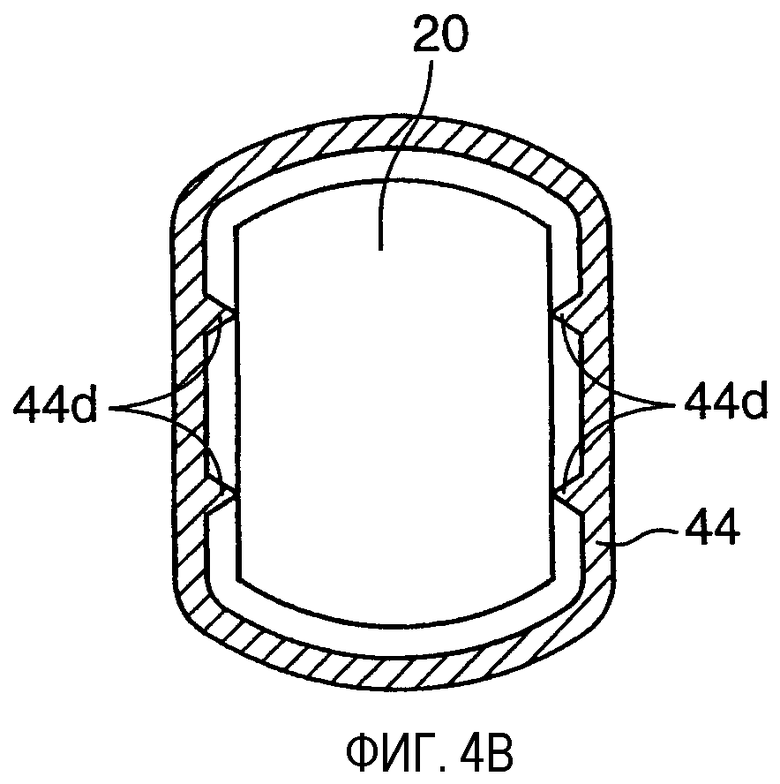
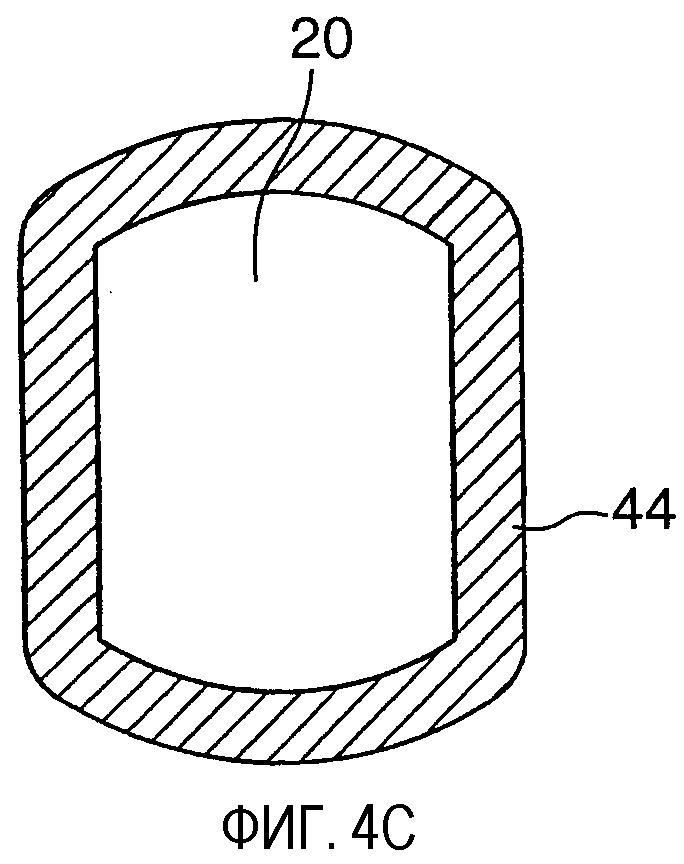
Фиг.4B и 4C - поперечные разрезы, каждый из которых иллюстрирует модификацию конфигурации в поперечном разрезе, показанной на фиг.4A согласно изобретению;
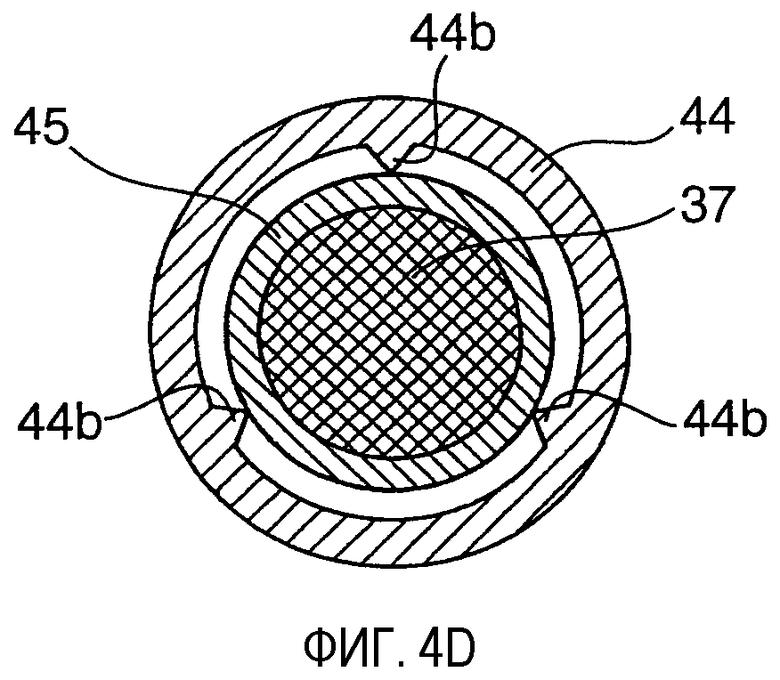
Фиг.4D - поперечный разрез по линии 4D-4D на фиг.2A согласно изобретению;
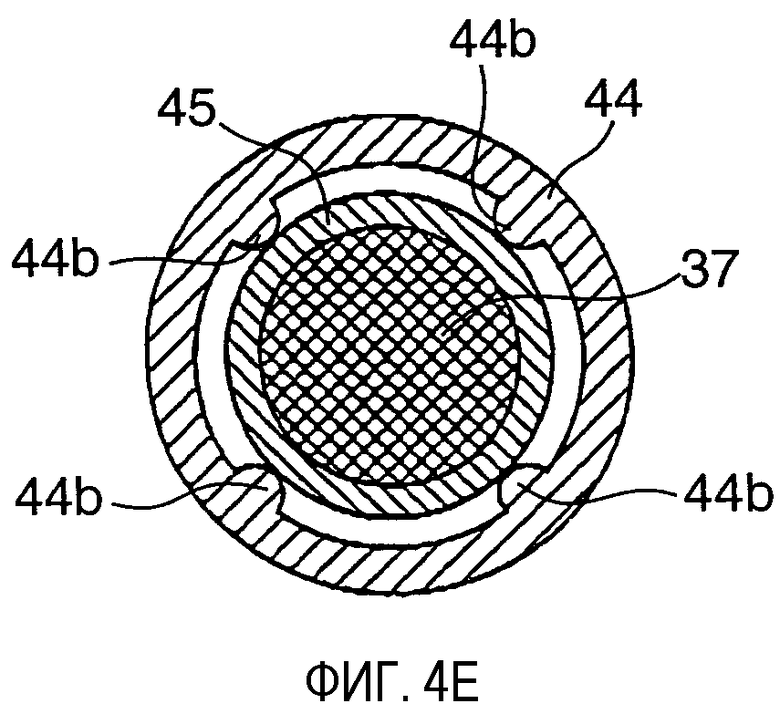
Фиг.4E - поперечный разрез, иллюстрирующий модификацию конфигурации в поперечном разрезе, показанной на фиг.4D согласно изобретению;
Фиг.5A - поперечный разрез известного колебательного привода, согласно изобретению;
Фиг.5B - общий вид известного колебательного привода согласно изобретению.
Далее описываются предпочтительные варианты осуществления изобретения со ссылками на чертежи.
Колебательный привод 26A согласно первому варианту осуществления изобретения (фиг.1) содержит подвижную часть 27, электромагнитный приводной механизм 28 для совершения возвратно-поступательных движений подвижной частью 27 в определенном направлении, т.е. в аксиальном направлении, соответствующем вертикальному направлению на фиг.1, посредством электромагнитной силы и основной корпус 30.
Подвижная часть 27 имеет плунжер 1 и выходной вал 2, прикрепленный к плунжеру 1. Выходной вал 2 имеет меньший диаметр и большую аксиальную длину, чем плунжер 1, и аксиально идет через среднюю часть плунжера 1. Плунжер 1 прикреплен к промежуточной части выходного вала 2, причем часть выходного вала 2 идет через плунжер 1.
Электромагнитный приводной механизм 28 содержит экранирующий корпус 4, часть магнита и опорные пружины 11 и 12 плунжера.
Экранирующий корпус 4 выполняет функцию электромагнитного экранирования и имеет форму трубы для размещения промежуточной части плунжера 1 и выходного вала 2. Сквозные отверстия 4a на аксиально-противоположных концах экранирующего корпуса 4 соответственно. Выходной вал 2 проходит через сквозные отверстия 4a таким образом, чтобы выходной вал 2 мог совершать аксиальные возвратно-поступательные движения.
Часть магнита включает в себя кольцевую электромагнитную катушку 3, кольцевые постоянные магниты 5 и 6, два кольцевых внутренних ярма 7 и 8 магнита и два кольцевых внешних ярма 9 и 10 магнита. Электромагнитная катушка 3 прикреплена к внутренней стенке экранирующего корпуса 4 в аксиально-промежуточной позиции. Постоянные магниты 5 и 6 прикреплены к внутренней стенке экранирующего корпуса 4 таким образом, что постоянные магниты 5 и 6 размещены на аксиально-противоположных концах электромагнитной катушки 3 соответственно. Внутренние ярма 7 и 8 магнита соответственно прикреплены к постоянным магнитам 5 и 6 в позициях, более близких к электромагнитной катушке 3, чем к постоянным магнитам 5 и 6. Внешние ярма 7 и 8 магнита соответственно прикреплены к постоянным магнитам 5 и 6 в позициях, более далеких от электромагнитной катушки 3, чем от постоянных магнитов 5 и 6.
Опорные пружины 11 и 12 плунжера являются спиралевидными пружинами сжатия и расположены между плунжером 1 и экранирующим корпусом 4. Опорная пружина 11 плунжера в сжатом состоянии размещена между внешней стенкой аксиально одного конца плунжера 1 и внутренней стенкой аксиально одного конца экранирующего корпуса 4. Опорная пружина 12 плунжера в сжатом состоянии размещена между внешней стенкой аксиально другого конца плунжера 1 и внутренней стенкой аксиально другого конца экранирующего корпуса 4. Пружины 11 и 12 удерживают плунжер 1 и выходной вал 2 внутри экранирующего корпуса 4, чтобы обеспечить возможность совершения возвратно-поступательных движений плунжера 1 и выходного вала 2 в аксиальном направлении. Другими словами, плунжер 1 и выходной вал 2 аксиально совершают возвратно-поступательные движения в соответствии с упругой деформацией соответствующих пружин 11 и 12.
В указанной конструкции, когда ток не протекает через электромагнитную катушку 3, плунжер 1 остается в стационарном положении, где магнитная сила, прилагаемая к плунжеру 1 посредством постоянных магнитов 5 и 6 через ярма 7, 8, 9 и 10 магнита, и сила сжатия пружин 11 и 12 сбалансированы друг с другом (фиг.1).
Основной корпус 30 имеет цилиндрическую форму с диаметром, большим диаметра экранирующего корпуса 4, для размещения в нем экранирующего корпуса 4. Сквозные отверстия 30a сформированы по аксиально-противоположным концам основного корпуса 30 соответственно. Выходной вал 2 проходит через сквозные отверстия 30a таким образом, чтобы выходной вал 2 мог совершать аксиальные возвратно-поступательные движения.
Опорные пружины 31 и 32 экранирующего корпуса в качестве опорных пружин электромагнитного приводного механизма, каждая из которых является спиралевидной пружиной сжатия, размещены между основным корпусом 30 и экранирующим корпусом 4.
Опорная пружина 31 экранирующего корпуса в сжатом состоянии размещена между внешней стенкой одного конца экранирующего корпуса 4 и внутренней стенкой одного конца основного корпуса 30. Опорная пружина 32 экранирующего корпуса в сжатом состоянии размещена между внешней стенкой аксиально относительно другого конца экранирующего корпуса 4 и внутренней стенкой аксиально относительно другого конца основного корпуса 30. Пружины 31 и 32 упруго удерживают экранирующий корпус 4 внутри основного корпуса 30, обеспечивая возможность совершения возвратно-поступательных движений экранирующего корпуса 4. Другими словами, экранирующий корпус 4 аксиально совершает возвратно-поступательные движения в соответствии с упругой деформацией соответствующих пружин 31 и 32.
В указанной конструкции, когда ток не протекает через электромагнитную катушку 3, экранирующий корпус 4 остается стационарно в положении, где силы сжатия пружин 31 и 32 сбалансированы друг с другом.
Опорные пружины 11 и 12 плунжера образуют пружинный осциллятор для приведения подвижной части 27 аксиально друг к другу. Аналогично, опорные пружины 31 и 32 экранирующего корпуса образуют пружинный осциллятор для приведения экранирующего корпуса 4 аксиально друг к другу. Электромагнитный приводной механизм 28 со значительной массой выступает в качестве нагрузки, практически эквивалентной нагрузке 14 для управления амплитудой для известного колебательного привода (фиг.5A).
Ток, протекающий через электромагнитную катушку 3 (фиг.1), генерирует электромагнитную силу, которая ослабляет поток магнитной индукции в одном из постоянных магнитов 5 и 6. Это вызывает движение плунжера 1 в направлении, противоположном постоянному магниту, посредством силы сжатия одной из пружин 11 и 12, которая предусмотрена на противоположной стороне постоянного магнита с ослабленным потоком магнитной индукции. Аналогично, ток, текущий через электромагнитную катушку 3 в направлении, противоположном вышеуказанному, перемещает плунжер 1 в направлении, противоположном вышеуказанному, против силы сжатия одной из пружин 11 и 12. Таким образом, переменный ток в электромагнитной катушке 3 заставляет совершать возвратно-поступательные движения плунжером 1 и выходным валом 2 как одним целым и аксиально в определенном направлении, т.е. в направлениях, показанных стрелками "a" на фиг.1.
Когда в электромагнитную катушку 3 подается ток с частотой, близкой ко второму порядку, т.е. собственной частоты f2 более высокого порядка, что является типом колебаний подвижной части 27 и электромагнитного приводного механизма 28 с фазами, противоположными друг другу, подвижная часть 27 аксиально совершает возвратно-поступательные движения и в то же время электромагнитный приводной механизм 28 перемещается с фазой, противоположной фазе возвратно-поступательных движений подвижной части 27, тем самым, подавляя силу инерции подвижной части 27. Аналогично, движение подвижной части 27 подавляет силу инерции электромагнитного приводного механизма 28. Кроме того, в этом режиме подвижная часть 27 и электромагнитный приводной механизм 28 как две материальные точки перемещаются таким образом, чтобы сбалансировать силы инерции подвижного элемента 27 и электромагнитного приводного механизма 28. Следовательно, эффект подавления сил инерции вследствие противодействия подвижной части 27 и электромагнитного приводного механизма 28 очень существенный. Этот эффект минимизирует силу, которая должна быть передана от двух материальных точек, т.е. подвижной части 27 и электромагнитного приводного механизма 28, в фиксирующую часть колебательного привода 26A, и в результате минимизирует колебания, генерируемые в колебательном приводе 26A. Другими словами, реализован колебательный привод 26A с меньшими колебаниями.
Таким образом, в колебательном приводе 26A в соответствии с первым вариантом осуществления электромагнитный приводной механизм 28 выполняет функцию нагрузки, практически эквивалентной нагрузке 14 для управления амплитудой, показанной на фиг.5A, помимо функции принудительного совершения возвратно-поступательных движений подвижной частью. Это устраняет необходимость предоставления нагрузки 14 для управления амплитудой независимо от электромагнитного приводного механизма 28, что исключает пространство для нагрузки 14 для управления амплитудой, тем самым позволяя миниатюризировать привод в целом. Кроме того, исключение нагрузки 14 для управления амплитудой уменьшает вес и стоимость привода в целом.
Далее описан колебательный привод 26B согласно второму варианту осуществления изобретения (фиг.2A-4E). Колебательный привод 26B - это примерный привод типа колебательного привода.
Колебательный привод 26B включает в себя подвижную часть 35, электромагнитный приводной механизм 36 для совершения возвратно-поступательных движений подвижной частью 27 в определенном направлении, т.е. в аксиальном направлении, соответствующем горизонтальному направлению на фиг.2A, посредством электромагнитной силы и основного корпуса 44.
Подвижная часть 35 имеет выходной вал 21, идущий в аксиальном направлении, аксиально-подвижной диск 17 в качестве ярма выходного вала, который прикреплен к тыльному концу выходного вала 21, и постоянный магнит 19 выходного вала, прикрепленный к аксиально-подвижному диску 17. Аксиально-подвижной диск 17 имеет тороидальную форму и прикреплен к внешней границе тыльного конца выходного вала 21. Постоянный магнит 19 имеет форму диска и прикреплен к тыльной поверхности аксиально-подвижного диска 17. Противоположные магнитные полюса (т.е., северные полюса и южные полюса) попеременно размещены по окружности постоянного магнита 19.
Электромагнитный приводной механизм 36 включает в себя корпус 37 привода в качестве внутреннего корпуса, электродвигатель 20, постоянный магнит 18 двигателя, поворотный диск 16 в качестве ярма двигателя и опорные пружины 42, 43 выходного вала, каждая из которых является спиралевидной пружиной сжатия.
Корпус 37 привода имеет форму трубы, а передняя и тыльная опоры 38 и 39 попарно расположены в корпусе 37 привода. Пара 38, 39 опор поддерживает выходной вал 21 при возвратно-поступательных движениях (конкретно, таким образом, чтобы выходной вал 21 мог бы совершать аксиальные возвратно-поступательные движения) в аксиальном направлении. Вывод выходного вала 21 проходит через сквозное отверстие 37a, сформированное в корпусе 37 привода для возвратно-поступательных движений.
Опоры 38 и 39 размещены на передней стороне и тыльной стороне на расстоянии друг от друга в аксиальном направлении выходного вала 21 соответственно. Углубление 37b задано между опорами 37 и 38. Подпятник 40 в качестве элемента гнезда пружины крепится к промежуточной части выходного вала 21, который размещен внутри углубления 37b. Опорные пружины 42 и 43 выходного вала предусмотрены между передней стороной подпятника 40 и корпусом 37 привода и между тыльной стороной подпятника 40 и корпусом 37 привода соответственно.
Подпятник 40 выдается по радиусу за пределы внешней поверхности выходного вала 21. Пружинные шайбы 41a и 41b размещены напротив друг другу на передней и тыльной сторонах относительно подпятника 40 по бокам опор 38 и 39 соответственно. Опорная пружина 42 выходного вала в сжатом состоянии размещена между пружинной шайбой 41a передней стороны и передней поверхностью подпятника 40. Опорная пружина 43 выходного вала в сжатом состоянии размещена между пружинной шайбой 41a тыльной стороны и тыльной поверхностью подпятника 40.
Опорные пружины 42 и 43 выходного вала упруго удерживают подпятник 40 и выходной вал 21 таким образом, чтобы обеспечить возможность аксиального совершения возвратно-поступательных движений подпятника 40 и выходного вала 21. Другими словами, подпятник 40 и выходной вал 21 аксиально совершают возвратно-поступательные движения в соответствии с упругой деформацией соответствующих опорных пружин 42 и 43 выходного вала. В результате выходной вал 21 остается стационарно в положении, когда пружины 42 и 43 сбалансированы друг с другом (фиг.2A и 3A).
Электродвигатель 20 прикреплен к тыльному концу корпуса 37 привода, при этом его выходной вал 20a направлен вперед. Электродвигатель 20 совершает возвратно-поступательные движения с помощью корпуса 37 привода. Выходной вал 20a двигателя прикреплен к поворотному диску 16, который прикреплен к постоянному магниту 18 двигателя.
Поворотный диск 16 имеет форму трубы и прикреплен к внешней поверхности выходного вала 20a двигателя. Постоянный магнит 18 двигателя прикреплен к передней поверхности поворотного диска 16 и находится напротив постоянного магнита 19 выходного вала. Аналогично постоянному магниту 19 выходного вала противоположные магнитные полюса (т.е. северные полюса и южные полюса) попеременно размещены по окружности постоянного магнита 18 двигателя.
Основной корпус 44 имеет практически цилиндрическую форму, и в нем размещены корпус 37 привода и электродвигатель 20. Сквозное отверстие 44a сформировано на переднем конце основного корпуса 44. Вывод выходного вала 21 проходит через сквозное отверстие 44a при возвратно-поступательных движениях.
Кольцевая металлическая пластина 45 ползуна крепится к внешней поверхности на переднем конце корпуса 37 привода. Множество ребер 44b сформировано на внутренней стенке основного корпуса 44 в положении, соответствующем пластине 45 ползуна. Каждое ребро 44b (фиг.4D) имеет форму треугольника в поперечном разрезе, и они размещены на равном расстоянии друг от друга (в данном примере, с интервалом в 120 градусов) вокруг периферии основного корпуса 44. Ребра 44b удерживают внутри пластину 45 ползуна, при этом их выдающиеся концевые части соприкасаются с внешней поверхностью пластины 45 ползуна. При такой конструкции корпус 37 привода удерживается в основном корпусе 44 при возвратно-поступательных движениях в аксиальном направлении. Пластина 45 ползуна поддерживает ровный скользящий контакт с ребрами 44b, и этот контакт может замедлять истирание ребер 44b более эффективно, чем непосредственный контакт между корпусом 37 и ребрами 44b.
Форма и число ребер 44b выбирается произвольно. Например, каждое ребро 44b (фиг.4E) может иметь полукруглую форму в поперечном разрезе, быть размещенным на одинаковом расстоянии с интервалом в 90 градусов вокруг периферии основного корпуса 44 и выдается по радиусу внутрь внутренней стенки основного корпуса 44, чтобы удерживать пластину 45 ползуна внутрь.
Электродвигатель 20 имеет продолговатую форму на виде спереди (фиг.4A-4C). Множество ребер 44c выдаются из внутренней стенки основного корпуса 44 в аксиальном направлении, соответствующем электродвигателю 20. Каждое ребро 44c (фиг.4А) имеет форму треугольника на поперечном разрезе и удерживает двигатель 20 внутри, не допуская вращения двигателя 20, при этом их выдающиеся концевые части соприкасаются с внешней поверхностью двигателя 20. При такой конструкции электродвигатель 20 удерживается внутри основного корпуса 44 при возвратно-поступательных движениях в аксиальном направлении.
Таким образом, корпус 37 привода и электродвигатель 20 удерживаются в основном корпусе 44, чтобы совершать аксиально возвратно-поступательные движения вместе.
Форма, число и положение ребер 44c для удержания электродвигателя 20 выбирается произвольно. Например, кроме конструкции, показанной на фиг.4A, где ребра 44c выступают внутрь из верхних и нижних внутренних стенок основного корпуса 44 (фиг.4B), треугольные ребра 44d в поперечном разрезе могут выступать внутрь из левых и правых внутренних стенок основного корпуса 44, так что ребра 44d удерживают электродвигатель 20, не допуская вращения электродвигателя 20. Альтернативно, основной корпус 44 (фиг.4C) также может удерживать электродвигатель 20, не допуская вращения электродвигателя 20. Основной корпус 44 имеет такую внутреннюю конфигурацию, чтобы соответствовать внешней конфигурации (на фиг.4C практически продолговатую форму) электродвигателя 20, так чтобы электродвигатель 20 принимался в основном корпусе 44.
Пара передней и тыльной опорных пружин 46 и 47 электромагнитного приводного механизма, каждая из которых является спиралевидной пружиной сжатия, размещена между корпусом 37 привода электромагнитного приводного механизма и электродвигателя 20 и основным корпусом 44. Опорная пружина 46 электромагнитного приводного механизма в сжатом состоянии размещена между передней концевой поверхностью корпуса 37 привода и внутренней стенкой переднего конца основного корпуса 44. Опорная пружина 47 электромагнитного приводного механизма в сжатом состоянии размещена между тыльной концевой поверхностью электродвигателя 20 и внутренней стенкой тыльного конца основного корпуса 44.
Опорные пружины 46 и 47 электромагнитного приводного механизма упруго удерживают корпус 37 привода и электродвигатель 20 в основном корпусе 44 таким образом, чтобы обеспечить возможность возвратно-поступательных движений корпуса 37 привода и электродвигателя 20 в аксиальном направлении. Другими словами, корпус 37 привода и электродвигатель совершают возвратно-поступательные движения в соответствии с упругой деформацией соответствующих опорных пружин 46 и 47 электромагнитного приводного механизма, при этом корпус 37 привода и электродвигатель 20 остаются стационарно в положении, когда пружины 46 и 47 сбалансированы друг с другом, т.е. в положениях, показанных на фиг.2A и 3A.
В вариантах осуществления изобретения пружинами 11, 12, 31, 32, 42, 43, 46, 47 могут быть пружины, отличные от спиралевидной пружины сжатия. Например, в случае, когда опорная пружина 46, 47 электромагнитного приводного механизма является пластинчатой пружиной или торсионным валом, сама пружина служит для того, чтобы не допускать вращения корпуса 37 привода, что устраняет необходимость в недопущении вращения электродвигателя 20, как упоминалось выше.
Опорные пружины 42 и 43 выходного вала составляют пружинный осциллятор для приведения подвижной части 35, включающей в себя выходной вал 21, аксиально друг к другу. Опорные пружины 46 и 47 электромагнитного приводного механизма составляют пружинный осциллятор для приведения электродвигателя 20 и корпуса 37 привода аксиально друг к другу. В такой конструкции электромагнитный приводной механизм 36, имеющий большую массу, выступает в качестве нагрузки, практически эквивалентной нагрузке 14 для управления амплитудой, показанной на фиг.5A.
Когда электродвигатель 20 запитывается в режиме, показанном на фиг.3A, он приводит в действие поворотный диск 16 и постоянный магнит 18 двигателя, которые прикреплены к выходному валу 20a двигателя, чтобы генерировать силы магнитного притяжения и отталкивания попеременно между постоянным магнитом 18 двигателя и постоянным магнитом 19, прикрепленным к аксиально-подвижному диску 17. Эти силы заставляют совершать возвратно-поступательные движения выходной вал 21 и дополнительно аксиально-подвижный диск 17 в аксиальных направлениях, показанных стрелками "a" на фиг.3B и 3C, другими словами, заставляют колебаться вал 21 и диск 17 как одно целое.
Когда сила магнитного притяжения генерируется между постоянными магнитами 18 и 19 (фиг.3B), подвижная часть 35 перемещается назад и одновременно электромагнитный приводной механизм 36 перемещается вперед. Когда сила магнитного отталкивания генерируется между постоянными магнитами 18 и 19 (фиг.3С), подвижная часть 35 перемещается вперед и одновременно электромагнитный приводной механизм 36 перемещается назад. Другими словами, когда подвижная часть 35 аксиально совершает возвратно-поступательные движения, электромагнитный приводной механизм 36 перемещается с фазой, противоположной фазе подвижной части 35.
Следовательно, электромагнитный приводной механизм 36 подавляет силу инерции подвижной части 35, и аналогично, подвижная часть 35 подавляет силу инерции электромагнитного приводного механизма 36. Кроме того, в этом состоянии подвижная часть 35 и электромагнитный приводной механизм 36 как две материальные точки перемещаются таким образом, чтобы балансировать силы инерции подвижной части 35 и электромагнитного приводного механизма 36. Эти противодействия обеспечивают очень существенный эффект подавления сил инерции и минимизации силы, которая должна быть передана от двух материальных точек, т.е. подвижной части 35 и электромагнитного приводного механизма 36, в фиксирующую часть колебательного привода 26B, что в результате минимизирует колебания, генерируемые в колебательном приводе 26B. Другими словами, реализован колебательный привод 26B с меньшими колебаниями.
В колебательном приводе 26B второго варианта осуществления электромагнитный приводной механизм 36 выполняет функцию нагрузки, практически эквивалентной нагрузке 14 для управления амплитудой (фиг.5A), помимо упомянутой функции принудительного совершения возвратно-поступательных движений подвижной частью, и устраняет необходимость предоставления нагрузки 14 для управления амплитудой независимо от электромагнитного приводного механизма 36. Это исключает необходимость пространства для нагрузки 14 для управления амплитудой, что позволяет миниатюризировать привод в целом. Кроме того, исключение нагрузки 14 для управления амплитудой позволяет уменьшить вес и стоимость привода в целом.
Изобретение, тем не менее, может включать в себя конструкцию с нагрузкой, практически эквивалентной нагрузке для управления амплитудой. Даже если предоставлена нагрузка, практически эквивалентная нагрузке для управления амплитудой, небольшая и более легкая нагрузка, чем нагрузка для управления амплитудой, используемая в традиционном колебательном приводе, может быть использована, что позволяет уменьшить вес и стоимость привода в целом.
Колебательный привод 26A, 26B может быть использован для любых целей. Например, колебательный привод 26A, 26B может быть использован не только в качестве приводного механизма электробритвы, электрической зубной щетки и т.п., но также может быть использован в качестве приводного механизма электрически управляемых стоматологических устройств. Применение привода 26A, 26B в вышеупомянутых электрических устройствах снижает вес корпуса устройства и при этом подавляет колебания, что обеспечивает легко управляемые и удобные электрические устройства.
Как упоминалось выше, изобретение касается колебательного привода, оснащенного подвижной частью и электромагнитным приводным механизмом для принудительного совершения возвратно-поступательных движений подвижной частью в центральном направлении посредством электромагнитной силы. Подвижная часть и электромагнитный приводной механизм помещены в основной корпус таким образом, чтобы подвижная часть и электромагнитный приводной механизм могли вместе совершать возвратно-поступательные движения в направлении, идентичном центральному направлению. Подвижная часть и электромагнитный приводной механизм совершают возвратно-поступательные движения в фазах, противоположных друг другу в основном корпусе посредством приведения в действие электромагнитного приводного механизма. При использовании колебательного привода нагрузка для управления амплитудой для подавления колебаний может быть исключена или может быть выполнена небольшой и легкой. Поэтому размер, вес и стоимость привода в целом могут быть уменьшены.
Предпочтительно, опорные пружины электромагнитного приводного механизма, которые являются упруго- и сжимающе-деформируемыми в направлении, идентичном определенному направлению, могут быть предусмотрены между основным корпусом и электромагнитным приводным механизмом, и электромагнитный приводной механизм может совершать возвратно-поступательные движения в направлении, идентичном определенному направлению, в соответствии с упругой деформацией соответствующих опорных пружин электромагнитного приводного механизма.
В вышеуказанной конструкции, когда электромагнитный приводной механизм не приведен в действие, опорные пружины электромагнитного приводного механизма удерживают электромагнитный приводной механизм в надлежащем положении. С другой стороны, когда электромагнитный приводной механизм приведен в действие, упругая деформация соответствующих опорных пружин электромагнитного приводного механизма дает возможность совершения возвратно-поступательных движений электромагнитным приводным механизмом.
Предпочтительно, опорные пружины подвижной части, которые являются упруго- и сжимающе-деформируемыми в направлении, идентичном определенному направлению, могут быть предусмотрены между подвижной частью и электромагнитным приводным механизмом, и подвижная часть может совершать возвратно-поступательные движения в определенном направлении в соответствии с упругой деформацией соответствующих опорных пружин подвижной части.
В вышеуказанной конструкции, когда электромагнитный приводной механизм не приведен в действие, опорные пружины подвижной части удерживают подвижную часть в надлежащем положении. С другой стороны, когда электромагнитный приводной механизм приведен в действие, упругая деформация соответствующих опорных пружин подвижной части дает возможность совершения возвратно-поступательных движений подвижной частью.
В вышеописанной конструкции предпочтительно электромагнитный приводной механизм может включать в себя часть магнита для совершения возвратно-поступательных движений подвижной частью и внутренний корпус для размещения части магнита и удержания подвижной части таким образом, чтобы подвижная часть могла совершать возвратно-поступательные движения в определенном направлении, а внутренний корпус может удерживаться в основном корпусе таким образом, чтобы внутренний корпус мог совершать возвратно-поступательные движения в направлении, идентичном определенному направлению.
В вышеуказанной конструкции часть магнита, размещенная во внутреннем корпусе, может принудительно совершать возвратно-поступательные движения с подвижной частью и при этом поддержка совершения возвратно-поступательных движений внутреннего корпуса в основном корпусе дает возможность совершать возвратно-поступательные движения с электромагнитным приводным механизмом, включающим в себя часть магнита и внутренний корпус.
В качестве первого аспекта изобретения предпочтительно подвижная часть может включать в себя плунжер, изготовленный из магнитного материала, причем плунжер размещается во внутреннем корпусе, а часть магнита может быть размещена вокруг плунжера, причем часть магнита прикреплена к внутренней стенке внутреннего корпуса.
Вышеуказанная конструкция дает возможность части магнита совершать возвратно-поступательные движения с плунжером, когда часть магнита размещена во внутреннем корпусе компактной конструкции.
Предпочтительно, подвижная часть дополнительно может включать в себя выходной вал с аксиальной длиной больше плунжера, плунжер может быть прикреплен к внешней поверхности промежуточной части выходного вала и выходной вал может аксиально проходить через внутренний корпус и основной корпус.
В этой конструкции возвратно-поступательное движение плунжером могут выводиться за пределы основного корпуса.
Предпочтительно, внутренним корпусом может быть экранирующий корпус, выполняющий функцию электромагнитного экранирования. Экранирующий корпус выполняет двойную функцию в качестве экранирующего элемента и элемента для размещения и удерживания части магнита, чтобы реализовать привод с малыми колебаниями и низким уровнем шума в компактном дизайне.
Предпочтительно, опорные пружины подвижной части могут быть опорными пружинами плунжера, которые предусмотрены между плунжером и внутренним корпусом, и плунжер может принудительно совершать возвратно-поступательные движения в определенном направлении в соответствии с упругой деформацией соответствующих опорных пружин плунжера.
Предпочтительно магнитная часть может включать в себя электромагнитную катушку, постоянные магниты, размещенные по аксиально-противоположным сторонам электромагнитной катушки соответственно, внутреннее ярмо магнита которой прикреплено к одному из постоянных магнитов в положении, более близком к электромагнитной катушке, чем к противостоящему постоянному магниту, и внешнее ярмо магнита, которое прикреплено к одному из постоянных магнитов в положении, более далеком от электромагнитной катушки, чем от противостоящего постоянного магнита.
В качестве второго аспекта изобретения предпочтительно подвижная часть содержит выходной вал, идущий в заданном направлении, и постоянный магнит выходного вала, который прикреплен к тыльному концу выходного вала, электромагнитный приводной механизм содержит электродвигатель с выходным валом двигателя, который размещен напротив тыльного конца выходного вала подвижной части, и корпус привода, который прикреплен к электродвигателю в его тыльной концевой части, причем корпус привода является внутренним корпусом, при этом часть постоянного магнита содержит постоянный магнит двигателя, который прикреплен к выходному валу двигателя и расположен напротив постоянного магнита выходного вала, причем противоположные магнитные поля ориентированы по окружности каждого из постоянных магнитов, чтобы генерировать электромагнитную силу для совершения возвратно-поступательных движений с выходным валом в определенном направлении в ответ на вращательное приведение в действие постоянного магнита двигателя посредством электродвигателя, причем электродвигатель и корпус привода могут удерживаться в основном корпусе таким образом, чтобы электродвигатель и корпус привода вместе совершали возвратно-поступательные движения в направлении, идентичном определенному направлению.
В вышеприведенной конструкции вращение постоянного магнита двигателя посредством электродвигателя генерирует силы магнитного притяжения и отталкивания попеременно между постоянным магнитом двигателя и постоянным магнитом выходного вала, чтобы принудительно аксиально совершать возвратно-поступательные движения с выходным валом. Кроме того, совершение возвратно-поступательных движений электромагнитного приводного механизма в целом, в том числе привода и электродвигателя, позволяет самому электромагнитному приводному механизму выступать в качестве нагрузки для управления амплитудой для подавления колебаний.
Предпочтительно, подвижная часть может включать в себя ярмо выходного вала, которое прикреплено к тыльному концу выходного вала подвижной части, при этом постоянный магнит выходного вала прикреплен к ярму выходного вала, а часть магнита может включать в себя ярмо двигателя, которое прикреплено к выходному валу электродвигателя, при этом постоянный магнит двигателя прикреплен к ярму двигателя.
Предпочтительно, основной корпус может включать в себя множество ребер, которые выступают внутрь из внутренней стенки основного корпуса, размещенных по окружности на расстоянии друг от друга, и проходящих в направлении, идентичном определенному направлению, причем ребра удерживают электромагнитный приводной механизм внутри с помощью своих выступающих концевых частей, соприкасающихся с электромагнитным приводным механизмом.
В вышеуказанной конструкции ребра устойчиво удерживают электромагнитный приводной механизм на стороне основного корпуса. Кроме того, небольшая область соприкосновения основного корпуса с электромагнитным приводным механизмом (конкретно, область соприкосновения выступающих концевых частей ребер с электромагнитным приводным механизмом) дает небольшое сопротивление скольжения между основным корпусом и электромагнитным приводным механизмом.
Предпочтительно, чтобы подвижная часть включала в себя элемент гнезда пружины, который предусмотрен в аксиально-промежуточной части выходного вала и который выступает по радиусу за пределы выходного вала, и между передней стороной элемента гнезда пружины и корпусом привода и между тыльной стороной элемента гнезда пружины и корпусом привода предусмотрена опорная пружина выходного вала, которая является упруго- и сжимающе-деформируемой в направлении, идентичном определенному направлению, причем выходной вал принудительно совершает возвратно-поступательные движения в определенном направлении в соответствии с упругой деформацией соответствующих опорных пружин выходного вала.
Данная заявка основана на патентной заявке Японии номер 2005-180375, поданной 21 июня 2005 года.
Хотя настоящее изобретение полностью описано посредством примера со ссылкой на прилагаемые чертежи, следует понимать, что различные изменения и модификации должны быть очевидны специалистам в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ МЕЖДУ ЭЛЕКТРИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ЭНЕРГИЕЙ | 2012 |
|
RU2603630C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И ЗУБНАЯ ЩЕТКА, В КОТОРОЙ ОН ИСПОЛЬЗУЕТСЯ | 2007 |
|
RU2371142C2 |
| ПОГРУЖНАЯ БЕСШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2017 |
|
RU2669418C1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| ЛИНЕЙНЫЙ КОЛЕБАТЕЛЬНЫЙ ПРИВОД | 2011 |
|
RU2479912C1 |
| ПОГРУЖНОЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2549381C1 |
| ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ НАСОС | 2001 |
|
RU2285150C2 |
| Устройство для сварки трением | 1989 |
|
SU1829990A3 |
| Установка для восполнения энергии аккумуляторов малых морских автономных аппаратов и буёв | 2017 |
|
RU2658713C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2003 |
|
RU2322724C2 |
Колебательный привод содержит подвижную часть и электромагнитный приводной механизм для совершения возвратно-поступательных движений подвижной частью в заданном направлении посредством электромагнитной силы. Подвижная часть и электромагнитный приводной механизм размещены в основном корпусе таким образом, чтобы вместе совершать возвратно-поступательные движения в направлении, идентичном заданному направлению. Подвижная часть и электромагнитный приводной механизм совершают возвратно-поступательные движения в фазах, противоположных друг другу в основном корпусе. Электромагнитный приводной механизм выступает в качестве нагрузки для управления амплитудой, что позволяет устранить или упростить другую нагрузку для управления амплитудой, уменьшить размер, вес и стоимость привода в целом.12 з.п. ф-лы, 13 ил.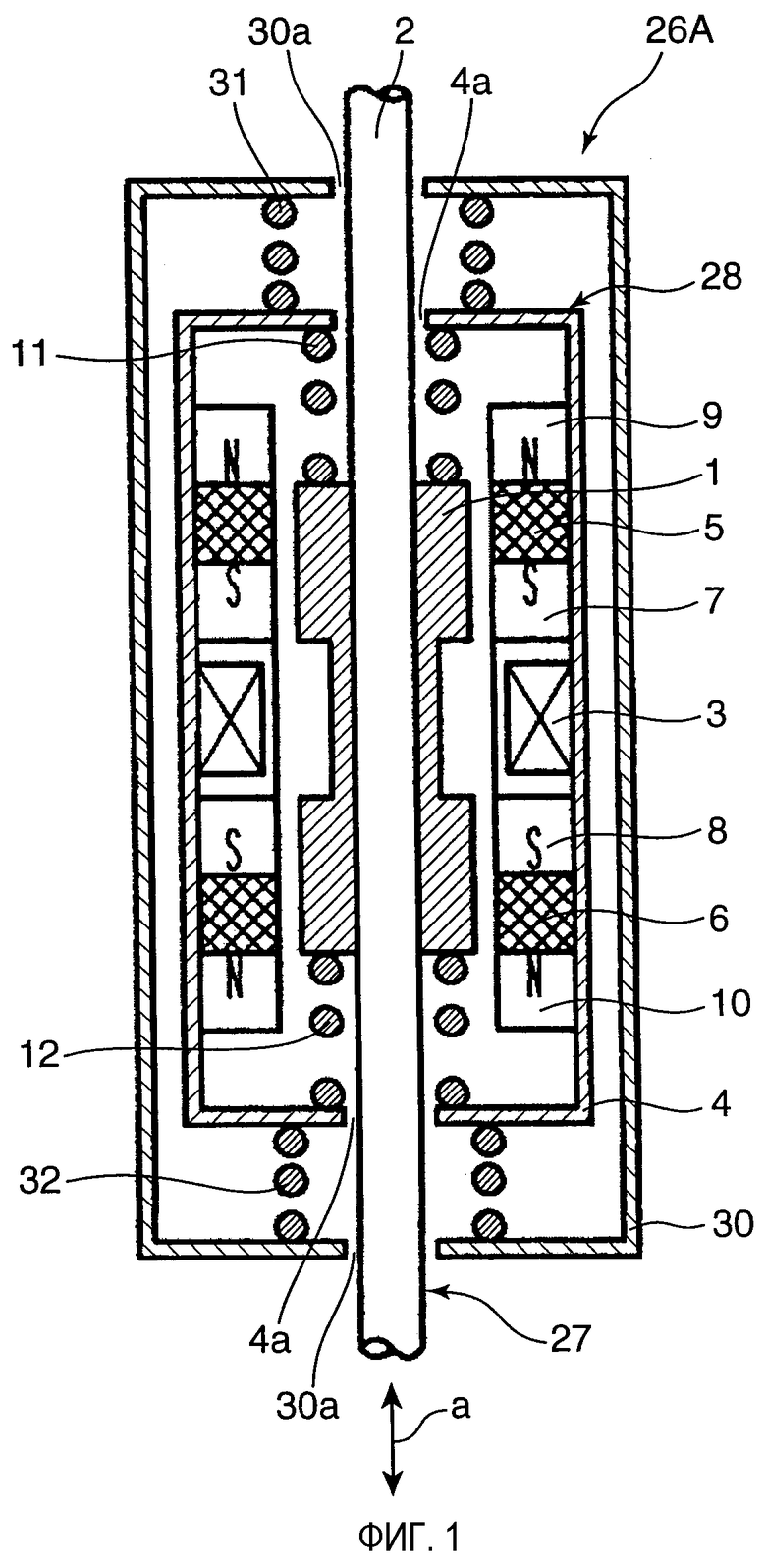
электромагнитный приводной механизм совершает возвратно-поступательные движения в направлении, идентичном заданному направлению, в соответствии с упругой деформацией опорных пружин электромагнитного приводного механизма.
при этом подвижная часть совершает возвратно-поступательные движения в заданном направлении в соответствии с упругой деформацией опорных пружин подвижной части.
при этом внутренний корпус удерживается в основном корпусе таким образом, чтобы совершать возвратно-поступательные движения в направлении, идентичном заданному направлению.
подвижная часть содержит плунжер, изготовленный из магнитного материала, причем плунжер размещен во внутреннем корпусе, часть магнита размещена вокруг плунжера, причем часть магнита прикреплена к внутренней стенке внутреннего корпуса.
выходной вал аксиально проходит через внутренний корпус и основной корпус.
внутренним корпусом является экранирующий корпус, выполняющий функцию электромагнитного экранирования.
плунжер принудительно совершает возвратно-поступательные движения в заданном направлении в соответствии с упругой деформацией опорных пружин плунжера.
магнитная часть содержит электромагнитную катушку, постоянные магниты, размещенные по аксиально-противоположным сторонам электромагнитной катушки, внутреннее ярмо магнита, которое прикреплено к одному из постоянных магнитов в положении, более близком к электромагнитной катушке, чем к противостоящему постоянному магниту, и внешнее ярмо магнита, которое прикреплено к одному из постоянных магнитов в положении, более далеком от электромагнитной катушки, чем от противостоящего постоянного магнита.
подвижная часть содержит выходной вал, проходящий в заданном направлении, и постоянный магнит выходного вала, который прикреплен к тыльному концу выходного вала,
электромагнитный приводной механизм содержит электродвигатель с выходным валом двигателя, при этом выходной вал двигателя размещен напротив тыльного конца выходного вала подвижной части, и внутренний корпус является корпусом привода, который прикреплен к электродвигателю в его тыльной концевой части,
часть магнита содержит постоянный магнит двигателя, который прикреплен к выходному валу двигателя и расположен напротив постоянного магнита выходного вала, причем противоположные магнитные полюса размещены по окружности на каждом из постоянных магнитов, чтобы генерировать электромагнитную силу для совершения возвратно-поступательного движения выходного вала в заданном направлении в ответ на вращательное приведение в действие постоянного магнита двигателя посредством электродвигателя, электродвигатель и корпус привода размещены в основном корпусе таким образом, чтобы электродвигатель и корпус привода могли вместе совершать возвратно-поступательные движения в направлении, идентичном заданному направлению.
часть магнита включает в себя ярмо двигателя, которое прикреплено к выходному валу электродвигателя, при этом постоянный магнит двигателя прикреплен к ярму двигателя.
основной корпус содержит множество ребер, которые выступают внутрь из внутренней стенки основного корпуса, размещенных по окружности на расстоянии друг от друга, и проходят в направлении, идентичном заданному направлению, причем ребра удерживают электромагнитный приводной механизм внутри с помощью своих выступающих концевых частей, соприкасающихся с электромагнитным приводным механизмом.
подвижная часть содержит элемент гнезда пружины, который предусмотрен в аксиально-промежуточной части выходного вала и который выступает по радиусу за пределы выходного вала, при этом опорные пружины выходного вала - это опорные пружины выходного вала, которые предусмотрены между передней стороной элемента гнезда пружины и корпусом привода и между тыльной стороной элемента гнезда пружины и корпусом привода, причем выходной вал принудительно совершает возвратно-поступательные движения в заданном направлении в соответствии с упругой деформацией опорных пружин выходного вала.
| US 4002935 А, 11.01.1977 | |||
| ЕР 1193844 А1, 03.04.2002 | |||
| JP 62237302 А, 17.10.1987 | |||
| JP 2004033930 А, 05.02.2004 | |||
| RU 2003123033 А, 10.02.2005. |

