Изобретение относится к области электромеханики и может быть использовано в вибрационных и вибрационно-ударных устройствах для возбуждения управляемых по частоте и амплитуде механических колебаний, а также к области художественно-декоративной обработки твердых материалов, например, для нанесения изображений на твердые материалы путем направленного программно-управляемого разрушения их поверхности ударным или ударно-вращательным методом.
Известно гравировальное устройство ([1] Патент 67926 от 28.05.2007 г.), содержащее основание с закрепленной стойкой, к которой прикреплена одним концом плоская пружина, а другим - с одним из концов Г-образного ярма электромагнита, прикрепленного к пластине, жестко закрепленной на основании, к другому концу Г-образного ярма прикреплена цанга, в которой установлен ударный инструмент в виде иглы с алмазным наконечником. На основании через регулятор-эксцентрик установлен подшипник, фиксируемый винтом, с возможностью отслеживания рельефа заготовки. Зазор между заготовкой и острием иглы должен быть менее 0,02 мм с возможностью передачи цвета без искажений. Известно устройство для нанесения изображения на твердой поверхности ([2] Патент 2350476 от 13.02.2007 г.), содержащее корпус, первый электродвигатель, второй двигатель, инструмент, выполненный с возможностью вращения вокруг своей оси и соединенный с концом вала второго электродвигателя, коромысло и пружины. Коромысло с рычагами, верхние части которых взаимодействуют с пружинами, установлено на валу первого электродвигателя с возможностью углового колебательного движения относительно точки пересечения продольной оси коромысла и оси вращения вала первого электродвигателя. Пружины соединяют каждую боковую сторону коромысла с поверхностью корпуса.
Главным недостатком указанных устройств-прототипов является использование в них механических пружин в роли упругих элементов для накопления потенциальной энергии, например, в [1] - это плоская и цилиндрическая пружины, а в [2] - цилиндрические пружины. Это связано с тем, что у механических пружин, работающих длительное время в многократно повторяющихся динамических режимах растяжения-сжатия и ударных нагрузок, с течением времени снижается несущая способность, усталостная прочность, а также выносливость. Кроме того, число колебаний, выдерживаемых пружинами до разрушения, зависит не только от нагрузок, действующих на пружины, но и от амплитуды самих колебаний: чем больше амплитуда колебаний при данном максимальном напряжении, тем меньше число циклов выдерживают пружины. Все это приводит к снижению эффективности, долговечности и эксплуатационного ресурса устройства и, как следствие, качества выгравированного изображения.
Известно устройство - роторный привод ([3] Патент US 4,795,929 «Rotary Actuator» от 03.01.1989 года), имеющий постоянный магнитный якорь с диаметрально противоположными полюсами различной полярности, установленный между парой статорных элементов, по крайней мере, один из которых является электромагнитом, так, что имеет возможность вращаться между первым и вторым положением при создании выбранного распределения потока хотя бы в одном электромагнитном статорном элементе. Электромагнитный статорный элемент создан так, что он создает ассиметричное магнитное поле, которое больше вблизи одного из противоположных полей якоря, чем в другом. Электромагнитный статор состоит из сердцевины из мягкого железного материала и внутренней поверхностью повернут к ротору. Катушка намотана на сердцевину так, чтобы создавать на сердцевине магнитные силовые поля на каждой поверхности сердцевины. Ассиметричное поле потока создается путем предоставления внутренней стороны сердцевины большего сегмента, увеличивающего поле потока и плотность в заданном месте и поля поменьше для остальной части сердцевины. Предпочтительно больший сегмент поверхности сердцевины вытянут наружу и тесно расположен к поверхности якоря для выбранного дугового расстояния.
В частности, привод включает пару электромагнитных статоров, каждый из которых имеет не магнитопроводимое ядро и катушку, взаимодействующих для создания первого и второго полюса. Статоры фиксированно закреплены на расстоянии друг против друга, их полюсы лежат на общей оси намагничивания, и имеют ассиметричную форму для предоставления большего силового поля одной стороне намагничивания, чем другой. Якорь, состоящий из цилиндрического постоянного магнита, имеющего противоположные первый и второй полюсы, лежащие вдоль диаметральной полюсной оси, закреплен с возможностью вращения между противоположными статорами так, что диаметральная полюсная ось изначально идет поперечно оси намагничивания статоров. Электрическая цепь выборочно подает напряжение электромагнитным статорам так, чтобы индуцировать на первом и втором полюсе управляемых статоров, прямо и обратно соответственно, для принуждения силового поля притягивать или отталкивать полюс вышеуказанного цилиндрического магнита, лежащего на той же стороне оси намагничивания, чтобы заставить якорь вращаться.
Также известно устройство - колебательный шаговый двигатель ([4] Патент US 5,126,605 «Oscillating Stepper Motor» от 30.06.1992 г.), включающий:
(а) однофазную кольцевую катушку статора, определяющую центральную цилиндрическую полость, указанная кольцевая катушка статора создает магнитное поле первой полярности, когда электрический ток проходит через нее в первом направлении;
(b) цилиндрический ротор, включающий роторный магнит, расположенный для вращательного движения относительно указанной кольцевой катушки статора в указанной центральной цилиндрической полости и соосно указанной кольцевой катушкой статора; указанный цилиндрический ротор, в зависимости от указанного магнитного поля первой полярности, создаваемого в указанной кольцевой катушке статора, может вращаться меньше чем на 180 градусов от стопорного положения к первому положению, определенному указанным магнитным полем указанной первой полярности; и
(c) стопорный магнит, фиксирование расположенный с учетом указанной катушки статора в указанной цилиндрической полости, для вращения указанного ротора к указанному стопорному положению, всегда, когда указанная кольцевая катушка статора обесточивается
В указанных устройствах [3], [4] роль упругих элементов выполняют магнитные составляющие, обеспечивающие поворот ротора из одного фиксированного положения в другое в пределах, ограниченных полюсами статора.
Недостатком устройств [3], [4] является то, что в них нет возможности настройки положения ротора относительно статора - это устойчивое положение изначально конструктивно задано, определяется взаимным расположением магнитного ротора и элементов статора. Во многих приложениях, например, при гравировании, необходима периодическая настройка начального устойчивого положения коромысла в плоскости колебаний для обеспечения оптимальной амплитуды колебаний.
Указанные совместные недостатки прототипов ставят задачу обеспечения периодической настройки устойчивого углового положения вала возбудителя колебаний, повышения надежности и эксплуатационного ресурса гравировального устройства, амплитуды и частоты колебаний рабочего инструмента, производительности, а следовательно, и качества его работы.
Эта задача решается тем, что в гравировальном устройстве, содержащем возбудитель колебаний, соединительные рычаги, упругие элементы и рабочий инструмент, вместо механических пружин в роли упругих элементов используются пассивные магнитные подвесы, представляющие собой систему из двух постоянных магнитов, расположенных друг к другу одноименными полюсами N-N или S-S, один из магнитов закреплен неподвижно, а другой - подвижно, и регулировочного элемента для настройки оптимального расстояния между магнитами. Не исключается использование электромагнитов вместо постоянных магнитов. Возможно использование в подвесах как аксиальных, так и диаметральных, двух или многополюсных постоянных магнитов.
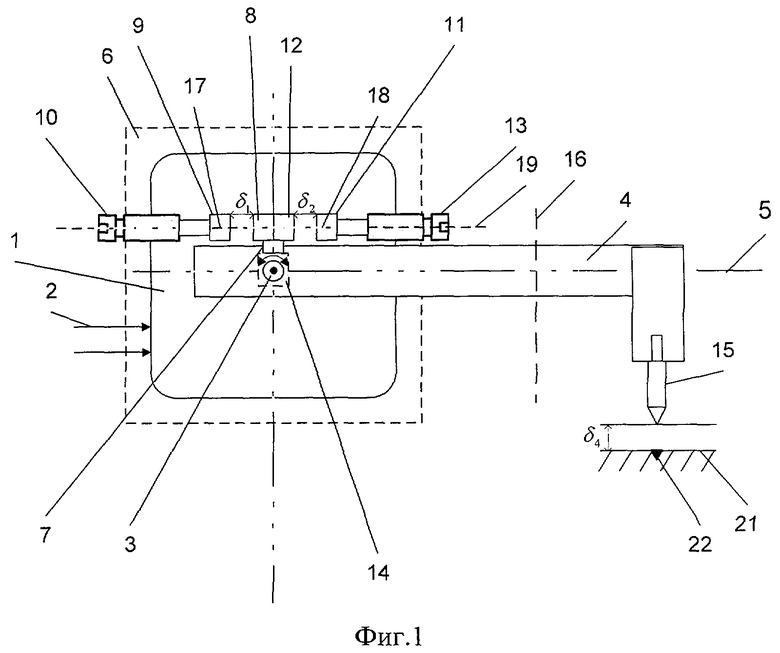
На фиг.1 представлена схема гравировального устройства с возбудителем колебаний на базе электродвигателя.
Предложенное устройство выполнено следующим образом. По первому варианту гравировальное устройство содержит электродвигатель 1, например, шаговый, на обмотки управления которого с блока управления (на фиг.1 не показан) поступают управляющие импульсы 2. На вал 3 электродвигателя 1 установлено коромысло 4, на конце которого установлен рабочий инструмент 15. Электродвигатель 1 с коромыслом 4 расположен внутри неподвижного корпуса 6. Коромысло 4 снабжено рычагом 7, к которому жестко соединены дисковые постоянные магниты 8 и 12. Коромысло 4 вместе с рычагом 7 выполнено с возможностью совершать угловые колебательные движения относительно оси вращения вала 3 электродвигателя 1. Для измерения амплитуды колебаний коромысла 4, а следовательно, и рабочего инструмента 15, используется, если это требует алгоритм управления, датчик углового положения 14, установленный на вал 3 электродвигателя 1. Параллельно магнитам 8 и 12 установлены постоянные магниты 9 и 11, каждый из которых жестко связан с регулировочным элементом 10 и 13, соответственно. В роли регулировочного элемента может выступать, например, передача винт - гайка или ей подобная по действию. Постоянные магниты 8, 9 в совокупности с регулировочным элементом 10 образуют первый пассивный магнитный подвес, а постоянные магниты 11, 12 в совокупности с регулировочным элементом 13 образуют второй пассивный магнитный подвес. Магнитные подвесы могут взаимодействовать с коромыслом 4 через рычаг 7, как показано на фиг.1, при этом оси 17 и 18 всех магнитов проходят вдоль оси 19. Возможен другой вариант расположения магнитных подвесов относительно коромысла 4. При этом магниты 8 и 12 крепятся неподвижно к коромыслу 4 сверху и снизу параллельно его оси 5, а магниты 9 и 11 крепятся параллельно им так, чтобы оси 17 и 18 всех магнитов 8, 9, 11, 12 проходили вдоль вертикальной оси 16. Не исключаются и другие комбинации расположения магнитных подвесов, а также самих постоянных магнитов друг относительно друга.
В роли возбудителя колебаний может выступать любой электродвигатель постоянного или переменного тока. а также двигатель с любым рабочим телом, например, пневмо- или гидродвигатель, а также электромагнитная катушка с сердечником или вибровозбудитель любой конструкции и типа. Постоянные магниты 8, 9, 11, 12 могут быть с аксиальными полюсами, диаметрально расположенными полюсами, двух или многополюсными и т.п.(фиг.4).
Возможен вариант, когда вместо постоянных магнитов используются электромагниты и/или их комбинации. В роли рабочего инструмента 15 может быть гравировальная игла или другой инструмент как ударного, так и ударно-вращательного действия.
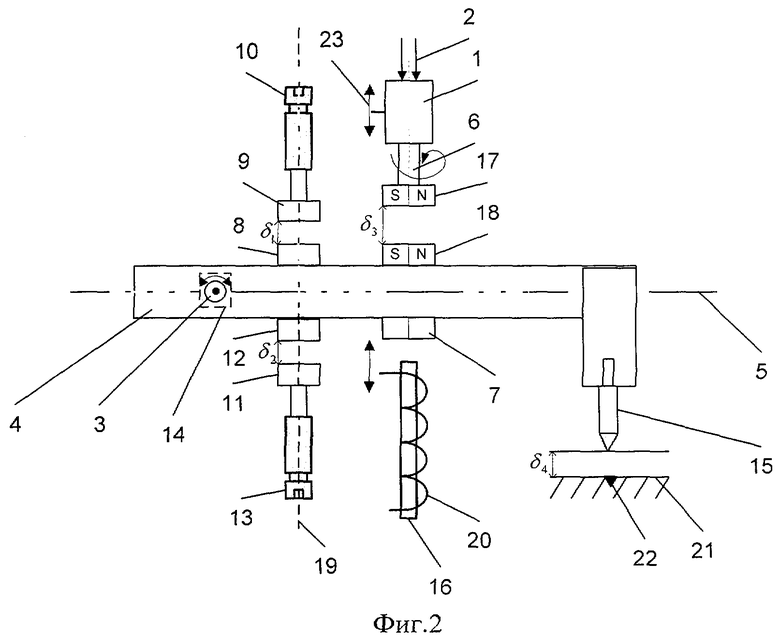
По второму варианту гравировальное устройство содержит двигатель 1, который выступает в роли возбудителя колебаний, на обмотки управления которого поступает сигнал управления 2. В торцевой части вала 6 двигателя 1 неподвижно закреплен постоянный магнит 17, например, дисковой формы с диаметрально расположенными полюсами (фиг.4), который может вращаться вместе с валом 6 двигателя 1. На вал 3 установлено коромысло 4 с рабочим инструментом 15 с возможностью совершать угловые колебательные движения в вертикальной плоскости. На коромысле 4 параллельно магниту 17 неподвижно закреплен постоянный магнит 18 с диаметрально расположенными полюсами, образуя с двигателем 1, магнитом 17 и регулировочным элементом 23 первый, активный, магнитный подвес. С коромыслом 4 также жестко соединены два других постоянных магнита 8 и 12. Параллельно магнитам 8 и 12 установлены постоянные магниты 9 и 11, каждый из которых соединен с регулировочным элементом 10 и 13, соответственно. Постоянные магниты 8, 9 в совокупности с регулировочным элементом 10 образуют второй, пассивный, магнитный подвес, а постоянные магниты 11, 12 в совокупности с регулировочным элементом 13 образуют третий, пассивный, магнитный подвес. Не исключаются и другие комбинации расположения магнитных подвесов относительно коромысла 4. Для измерения амплитуды колебаний коромысла 4, а следовательно, и рабочего инструмента 15, используется, если это требует алгоритм управления, датчик углового положения 14, установленный на вал 3. В роли возбудителя колебаний 1 может выступать любой электродвигатель постоянного или переменного тока, а также двигатель с любым рабочим телом, например пневмодвигатель или гидродвигатель и т.п. Постоянные магниты 8, 9, 11, 12, 17, 18 могут быть с аксиальными полюсами (фиг.3), с диаметральным расположением полюсов, двухполюсные (фиг.4,а) или многополюсные (фиг.4,б). Для регулирования амплитуды колебаний рабочего инструмента в соответствии с параметрами точек гравируемого изображения, гравировальное устройство снабжено вторым возбудителем колебаний, например, электромагнитной катушкой 20 с сердечником 16 и якорем 7, жестко соединенным с коромыслом 4. При поступлении тока в катушку 20 электромагнита коромысло 4 с рабочим инструментом 15 дополнительно перемещается к сердечнику 16 электромагнита. Амплитуда этого перемещения пропорциональна яркости элементарной точки гравируемого изображения. Предложенное устройство работает следующим образом. По первому варианту, на обмотки управления возбудителя колебаний, например, шагового электродвигателя 1 (фиг.1), статор которого представляет собой многополюсное электромеханическое устройство, поступает периодическая последовательность импульсов управления 2 в виде широтно-импульсной модуляции (ШИМ), частотно-импульсной модуляции (ЧИМ), амплитудно-импульсной модуляции (АИМ) или их комбинации с заданными шириной, периодом или амплитудой, соответствующими яркости точек гравируемого изображения. Во время действия импульса управления вал 3 двигателя 1 начинает поворачиваться вокруг своей оси (фиг.1). Вал 3 приводит в движение коромысло 4 и связанные с ним магниты 8 и 12 пассивных магнитных подвесов, которые оказывают динамическое подпружинивание коромысла 4. Угловое движение коромысла 4 относительно оси вращения вала 3 двигателя 1 ограничено действием магнитов 9 и 11, расположенных параллельно магнитам 8 и 12, соответственно, своими одноименными полюсами друг к другу. В случае использования постоянных магнитов с диаметрально расположенными полюсами возможно частичное совмещение их одноименных полюсов, то есть частичное перекрывание магнитных полей полюсов. С помощью регулировочных элементов 10 и 13 настраиваются необходимые зазоры δ1 и δ2 между магнитами 8, 9 и 11, 12 магнитных подвесов. Управление элементами 10, 13 может быть выполнено как вручную, используя показания датчика положения 14, так и автоматически, с помощью следящего привода, если это требует алгоритм управления. Магниты 8, 9, 11 и 12 выбирают по величине требуемой магнитной индукции, а расположение магнитных подвесов относительно друг друга и величины зазоров δ1 и δ2 настраиваются с помощью элементов 10 и 13 таким образом, чтобы обеспечить оптимальные по амплитуде и частоте колебания коромысла 4, а следовательно, и рабочего инструмента 15. Например, таким оптимальным свойством может быть максимум амплитуды колебаний коромысла, а следовательно, и рабочего инструмента в вертикальной плоскости колебаний. С момента окончания предыдущего и до поступления следующего импульса управления коромысло под действием упругих сил отталкивания магнитов 8, 9 и 11, 12 начинает движение в обратном направлении. Момент времени завершения обратного хода коромысла 4 и подачи следующего рабочего управляющего импульса, соответствующего параметрам точки гравируемого изображения, определяется, если это требует алгоритм управления, с помощью датчика углового положения 14 вала 3 двигателя 1. Таким образом, коромысло 4 вместе с рабочим инструментом 15 начинает совершать колебательные движения в вертикальной плоскости перпендикулярно поверхности заготовки 21, на которую переносится изображение 22. В отличие от механических пружин, упругие силы взаимодействия в которых линейно зависят от величины деформации, например, по закону Гука, силы отталкивания постоянных магнитов нелинейно зависят от расстояния между ними, что дает возможность использования переменного коэффициента динамической упругости, а значит, и более широкого спектра амплитуды и частоты колебаний рабочего инструмента.
Динамика колебательного движения гравировального устройства зависит от геометрического расположения магнитных подвесов относительно коромысла 4, величины зазоров δ1 и δ2, величин магнитной индукции постоянных магнитов, которые влияют на качество работы гравировального устройства.
По второму варианту на вход двигателя 1 поступает последовательность управляющих импульсов 2, под действием которых вал 6 двигателя 1 начинает вращаться с заданной скоростью в заданном направлении. Вместе с валом 6 начинает вращаться постоянный дисковый магнит 17, жестко связанный с валом 6 двигателя 1. Когда магнит 17 проходит над магнитом 18, неподвижно установленным на коромысле 4, и их полюса совпадают, например, N-N или S-S, то появляется отталкивающая сила, которая, действуя на коромысло 4, заставляет его вращаться в одну сторону, например, по часовой стрелке, а пассивные магнитные подвесы обеспечивают динамическое подпружинивание коромысла 4. С момента, когда одноименные полюса магнитов 17 и 18 начинают расходиться, и до полного совпадения разноименных полюсов, S-N, коромысло 4 под действием сил притяжения магнитов 17 и 18, а также под действием сил отталкивания магнитов 8, 9, 11, 12 начинает движение в противоположном направлении, например, против часовой стрелки. Так как магниты 8, 9, 11, 12 пассивных магнитных подвесов всегда работают на отталкивание и расположены с противоположных сторон коромысла 4, то силы их взаимного отталкивания не дают магнитам 17 и 18 активного магнитного подвеса прилипнуть друг к другу в процессе взаимодействия. В отличие от первого варианта, где возбудитель колебаний работает в реверсивном режиме, характеризующемся большими затратами времени на разгон, остановку и торможение, во втором варианте колебания коромысла и рабочего инструмента возбуждаются двигателем 1, постоянно вращающимся только в одном направлении с заданной скоростью, что позволяет значительно уменьшить постоянную времени гравировального устройства и увеличить частоту и амплитуду колебаний рабочего инструмента. При отсутствии управляющего импульса между вершиной рабочего инструмента 15 и поверхностью заготовки 21 все время сохраняется постоянный заданный зазор δ4, то есть инструмент колеблется в вертикальной плоскости, не касаясь вершиной наконечника поверхности заготовки. В случае появления управляющего импульса электромагнитная катушка 20 с сердечником 16 сообщает коромыслу 4 с рабочим инструментом 15 дополнительную энергию на перемещение путем притяжения якоря 7, которая тратится на преодоление рабочего зазора δ4 и разрушение поверхности с амплитудой, а значит, и силой, пропорциональной яркости точки 22 гравируемого изображения. С помощью регулировочных элементов 10, 13, 23 устанавливаются необходимые зазоры δ1, δ2, δ3 между магнитами 8, 9, 11, 12, 17, 18 всех трех магнитных подвесов. Управление элементами 10, 13, 23 может быть выполнено как вручную, используя показания датчика положения 14, так и автоматически с помощью следящего привода, если это требует алгоритм управления. Датчик положения 14 позволяет обеспечить синфазность обоих движений: колебательного движения рабочего инструмента 15, вызванного активным магнитным подвесом 1, 17, 23, и приращения на удар, вызванного током в катушке 20. Таким образом, разделение движения на две составляющие - колебание рабочего инструмента с заданной частотой и дополнительное перемещение его на удар - позволяет значительно увеличить амплитуду и частоту колебаний рабочего инструмента, быстродействие системы, производительность работы, а также снизить энергозатраты на управление.
Предлагаемые варианты гравировального устройства, описанные выше, относятся к одному из примеров предпочтительного осуществления изобретения. Также возможны другие варианты конструктивного исполнения гравировального устройства.
Изобретение относится к области электромеханики, а также к художественно-декоративной обработки твердых материалов и касается гравировального устройства. Устройство содержит возбудитель колебаний и упругие элементы. В одном варианте устойчивые угловые колебания коромысла с рабочим инструментом, жестко связанного с валом возбудителя колебаний, обеспечиваются пассивными магнитными подвесами, выполненными как система постоянных магнитов, работающих по дифференциальной схеме в режиме отталкивающих сил, и элементов для регулирования расстояния между магнитами. В другом варианте возбуждение колебаний коромысла с рабочим инструментом осуществляется активным магнитным подвесом, состоящим из двигателя, постоянного магнита, закрепленного на торцевой части вала двигателя, вращающегося с заданными скоростью и направлением, и магнита, жестко соединенного с коромыслом. В качестве упругих элементов используются пассивные магнитные подвесы, выполненные как система постоянных магнитов, работающих по дифференциальной схеме в режиме отталкивающих сил, и элементов для регулирования расстояния между магнитами. Дополнительное перемещение рабочему инструменту сообщается вторым возбудителем колебаний. Изобретение обеспечивает создание устройства с регулируемым положением устойчивого равновесия вала возбудителя колебаний, а также повышение амплитуды и частоты колебаний рабочего инструмента, надежности, эксплуатационного ресурса гравировального устройства, производительности и качества его работы. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Гравировальное устройство, содержащее возбудитель колебаний и упругие элементы, отличающееся тем, что устойчивые угловые колебания коромысла с рабочим инструментом, жестко связанного с валом возбудителя колебаний, обеспечиваются пассивными магнитными подвесами, выполненными как система постоянных магнитов, работающих по дифференциальной схеме в режиме отталкивающих сил, и элементов для регулирования расстояния между магнитами.
2. Устройство по п.1, отличающееся тем, что постоянные магниты магнитного подвеса могут быть с аксиальным и/или диаметральным расположением полюсов.
3. Устройство по п.1, отличающееся тем, что вместо постоянных магнитов в магнитных подвесах могут использоваться электромагниты.
4. Устройство по п.1, отличающееся тем, что для активного контроля и регулирования положения коромысла с рабочим инструментом относительно поверхности заготовки на валу возбудителя колебаний установлен датчик углового положения.
5. Гравировальное устройство, содержащее возбудитель колебаний и упругие элементы, отличающееся тем, что возбуждение колебаний коромысла с рабочим инструментом осуществляется активным магнитным подвесом, состоящим из двигателя, вращающегося с заданными скоростью и направлением, постоянного магнита, закрепленного на торцевой части вала двигателя, и магнита, жестко соединенного с коромыслом, а в качестве упругих элементов используются пассивные магнитные подвесы, выполненные как система постоянных магнитов, работающих по дифференциальной схеме в режиме отталкивающих сил, и элементов для регулирования расстояния между магнитами, а дополнительное перемещение рабочему инструменту сообщается вторым возбудителем колебаний.
6. Устройство по п.5, отличающееся тем, что в роли второго возбудителя колебаний может выступать электромагнитная катушка с сердечником или любой другой возбудитель механических колебаний.
7. Устройство по п.5, отличающееся тем, что постоянные магниты магнитного подвеса могут быть с аксиальным и/или диаметральным расположением полюсов, а также многополюсные.
8. Устройство по п.5, отличающееся тем, что вместо постоянных магнитов в магнитных подвесах могут использоваться электромагниты.
9. Устройство по п.5, отличающееся тем, что для активного контроля и регулирования положения коромысла с рабочим инструментом относительно поверхности заготовки на валу возбудителя колебаний установлен датчик углового положения.
| ГРАВИРОВАЛЬНЫЙ ЭЛЕКТРОМОЛОТОК | 1994 |
|
RU2077988C1 |
| Способ регенерации катализаторов | 1945 |
|
SU67926A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ИЗОБРАЖЕНИЯ НА ТВЕРДОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2350476C2 |
| US 4795929 A, 03.01.1989 | |||
| US 5126605 A, 30.06.1992 | |||
| WO 9725205 A1, 17.07.1997 | |||
| Предохранительное устройство для защиты ворот судовых шлюзов от навала судов | 1976 |
|
SU624984A1 |

