Предлагаемое изобретение относится к управляемым боеприпасам, которые выстреливаются из ствола пушки и предназначены для поражения наземных бронированных целей.
Такие боеприпасы имеют следующие основные узлы: корпус-обтекатель, аэродинамические стабилизаторы, рулевой привод, бортовую электронную аппаратуру управления, трехстепенной гироскоп крена с расположением оси наружной рамки вдоль продольной оси боеприпаса и боевую часть со взрывателем.
Телеуправление боеприпасами осуществляется с пусковой установки по лучевой линии связи, например по лучу лазера, направленному на цель. Сигналы управления, соответствующие отклонению боеприпаса от луча, передаются на приемное устройство бортовой аппаратуры управления, обрабатываются, модулируются по углу крена и поступают на рулевой привод, который ликвидирует отклонение боеприпаса от луча.
Одной из особенностей рассматриваемых боеприпасов является произвольное по крену заряжание в ствол пушки. При этом после заряжания система координат гироскопа также оказывается произвольно ориентирована по крену и не может быть использована в качестве опорной для преобразования сигналов управления из системы координат, связанной с пусковой установкой, в систему координат, связанную с вращающимся по крену боеприпасом. Для однозначной ориентации системы координат в рассматриваемом случае можно использовать физический маятник, который связан с чувствительным элементом гироскопа угла крена (например, с токосъемником ламельного датчика или потенциометра), который устанавливается свободно на оси наружной рамки гироскопа. Перед выстреливанием боеприпаса гироскоп приводится в рабочее состояние (раскручивается его ротор) и разарретируется с фиксацией чувствительного элемента датчика относительно наружной рамки гироскопа и отделением груза маятника.
Известен способ защиты чувствительных элементов гироскопа крена управляемого вращающегося по крену боеприпаса от действия стартовых перегрузок, устройство для его реализации и способ его сборки [1].
Рассматриваемый управляемый боеприпас выстреливается из транспортно-пускового контейнера, в котором однозначно ориентируется как сам боеприпас, так и система координат гироскопа крена, которая используется в качестве опорной при формировании сигналов управления. Боеприпас имеет следующие основные узлы: корпус-обтекатель, аэродинамические стабилизаторы, рулевой привод, бортовую электронную аппаратуру управления, трехстепенной гироскоп крена с расположением оси наружной рамки вдоль продольной оси боеприпаса и боевую часть со взрывателем. Ротор гироскопа разгоняется пороховой реактивной турбиной. Датчик крена выполнен в виде 4-х ламелей, установленных по окружности посредством изоляционной втулки на оси наружной рамки, где также размещены коллекторные кольца. Токосъемники ламелей и коллекторных колец установлены на корпусе. Введение угла упреждения, компенсирующего запаздывание рулевого привода, выполнено разворотом ламельного датчика относительно токосъемников.
Способ защиты чувствительных элементов гироскопа угла крена управляемого боеприпаса от действия стартовых и вибрационных ускорений заключается в выборе зазоров в чувствительных элементах гироскопа крена с учетом упругой податливости деталей гироскопа и оболочки боеприпаса.
Рассмотренный боеприпас используется в контейнерных системах, имеет небольшую стартовую перегрузку до 800 ед. и не пригоден для произвольного по крену заряжания, как в ствольных системах. При таких небольших перегрузках защита чувствительных элементов обеспечивается за счет выбора обычных шарикоподшипников и простых нагружаемых сечений деталей. Кроме того, в нем применяются характерные для боеприпасов 1-го поколения проводная линия связи с пусковой установкой и пороховой гироскоп с контактным датчиком, что усложняет конструкцию и снижает надежность работы. Способ сборки боеприпаса заключается в установке гарантированных зазоров между подвижными и неподвижными элементами датчика крена гироскопа, настройке контактных давлений в токосъемниках и юстировке системы координат рулей управления и системы координат датчика крена.
Известен способ защиты чувствительных элементов гироскопа крена управляемого вращающегося по крену боеприпаса, выстреливаемого из ствола пушки, от действия стартовых перегрузок, устройство для его реализации и способ сборки [2], который по технической сути является наиболее близким аналогом (прототипом). Боеприпас имеет следующие основные узлы: корпус-обтекатель, аэродинамические стабилизаторы, рулевой привод, бортовую электронную аппаратуру управления, трехстепенной гироскоп крена с расположением оси наружной рамки вдоль продольной оси боеприпаса и боевую часть с взрывателем. Ротор гироскопа разгоняется пороховой реактивной турбиной. Датчик крена в гироскопе выполнен в виде 16-ти ламелей с резисторами, установленных по окружности посредством изоляционной платы на корпусе, где также размещены коллекторные кольца. Токосъемники установлены свободно на оси наружной рамки и соединены с грузом маятника. Введение угла упреждения, компенсирующего запаздывание рулевого привода, осуществляется разворотом токосъемников относительно вертикали.
Телеуправление боеприпасами осуществляется с пусковой установки по лучу лазера, направленному на цель. Сигналы управления, соответствующие отклонению боеприпаса от луча, передаются на приемное устройство бортовой аппаратуры управления, обрабатываются, суммируются и модулируются по углу крена непосредственно в ламельно-резисторном датчике гироскопа и поступают на рулевой привод, который ликвидирует отклонение боеприпаса от луча.
При выстреливании рассматриваемого боеприпаса из ствола пушки на его элементы воздействует значительная стартовая перегрузка до 3000 ед. Для защиты элементов гироскопического датчика от воздействия указанной перегрузки применено равномерное распределение инерционной нагрузки по продольной оси боеприпаса одновременно на два шарикоподшипника по оси наружной рамки. Для этого предусмотрена установка переднего подшипника на упругом основании, которое после прогиба позволяет загружать задний подшипник.
Способ защиты чувствительных элементов гироскопа крена управляемого боеприпаса от действия стартовых перегрузок заключается в выборе зазоров в чувствительных элементах гироскопического датчика крена гироскопа с учетом упругой деформации деталей гироскопа и оболочки боеприпаса и распределении инерционной нагрузки на два подшипника по оси наружной рамки.
Рассматриваемый боеприпас ориентируется произвольно по крену при заряжании в ствол пушки. Для однозначной ориентации системы координат в рассматриваемом случае используется физический маятник, который связан с чувствительным элементом датчика угла крена (с токосъемником ламельного датчика), который устанавливается свободно на оси наружной рамки гироскопа. Перед выстреливанием боеприпаса гироскоп приводится в рабочее состояние (раскручивается его ротор) и разарретируется с фиксацией чувствительного элемента датчика относительно наружной рамки гироскопа и отделением груза маятника. Способ сборки боеприпаса заключается в установке гарантированных зазоров между подвижными и неподвижными элементами датчика крена гироскопа, настройке контактных давлений в токосъемниках и юстировке системы координат рулей управления и системы координат датчика крена.
Недостатком данного способа и конструкции являются сложность и низкая надежность работы при дальнейшем увеличении стартовой перегрузки, а также использование контактного датчика угла крена и порохового гироскопа, что снижает надежность работы из-за засорения опор и контактных поверхностей пороховыми газами и создает вредные моменты трения.
Предлагаемое изобретение актуально в связи с тем, что повышает точность и надежность работы боеприпаса за счет упрощения конструкции, применения пружинного гироскопа с оптронным датчиком угла с обеспечением работоспособности при увеличенных стартовых перегрузках до 6000 ед.
Технической задачей предлагаемого изобретения является обеспечение работоспособности боеприпаса при действии значительных стартовых перегрузок, повышение надежности работы и упрощение конструкции.
Для достижения цели в способе защиты чувствительных элементов гироскопа крена управляемого боеприпаса, выстреливаемого из ствола пушки, от действия стартовых перегрузок, основанного на настройке зазоров в чувствительных элементах гироскопа крена с учетом упругой податливости деталей гироскопа и оболочки боеприпаса, предварительно компенсируют воздействие стартовых перегрузок встречным усилием поджатая чувствительных элементов гироскопа крена, размещают чувствительные элементы гироскопа со смещением от продольной оси боеприпаса, затем осуществляют настройку компенсационных зазоров между взаимосвязанными чувствительными элементами гироскопа методом радиального вкладывания чувствительных элементов в гироскоп с возможностью перемещения как вдоль оси боеприпаса, так и по направлению его вращения при юстировке гироскопа относительно рулевого привода.
Для достижения цели в поставленной задаче в управляемом вращающемся по крену выстреливаемом из пушки боеприпасе, содержащем рулевой привод с электронным устройством, корпус, боевую часть и гироскоп крена, в нем:
- гироскоп крена выполнен пружинным с оптронным датчиком угла, в котором зубооконная шторка изготовлена в виде диска и установлена на цапфе наружной рамки гироскопа на шарикоподшипнике со стороны направления движения боеприпаса с ориентацией по вертикали грузом маятника;
- в датчике использованы две оптопары, сдвинутые друг относительно друга на 90° и размещенные во вкладном корпусе, в котором элементы оптопар - фотодиод и светодиод - установлены встречно друг к другу с оптической осью вдоль оси боеприпаса;
- кронштейн для крепления вкладыша размещен вдоль образующей корпуса гироскопа и вблизи образующей оболочки боеприпаса с возможностью перемещения относительно кронштейна в крепежных отверстиях;
- вкладыш размещен П-образно относительно диска шторки с охватом элементами оптопар сектора зубооконного диска на его периферии с зазором;
- торец цапфы наружной рамки с противоположной от шторки стороны установлен на разгрузочный сферический подпятник;
- боковые стойки наружной рамки, параллельные оси боеприпаса и охватывающие гиромотор, соединены оболочками в виде шаровых сегментов с цапфами по оси симметрии рамки;
- на цапфе диска установлена подпружиненная шлицевая муфта с возможностью после разарретирования гироскопа соединять диск с рамкой, выбирать люфт шарикоподшипника и разгружать диск его от действия стартовой перегрузки.
Для достижения цели в поставленной задаче в способе сборки управляемого боеприпаса с гироскопом крена, заключающемся в установке гарантированных зазоров между подвижными и неподвижными элементами гироскопа крена, юстировке системы координат рулей управления и системы координат гироскопа крена, в нем:
- предварительно затягивают крепежные винты вкладыша с взаимосвязанными чувствительными элементами (оптопарами) до обеспечения тугого перемещения вкладыша в корпусе гироскопа;
- поджимают диск зубооконной шторки пружиной и муфтой в разарретированном состоянии гироскопа;
- устанавливают предельные калибры в зазоры между диском и взаимосвязанными чувствительными элементами (оптопарами), перемещая вкладыш вдоль оси боеприпаса;
- ориентируют вкладыш в центре крепежных отверстий при его развороте по углу крена;
- устанавливают корпус гироскопа вращением по крену в положение, соответствующее мгновенному положению контролируемого руля по вертикали места, при этом обеспечивают разворот оптопар относительно рулей управления на угол, компенсирующий запаздывание их срабатывания;
- осуществляют окончательную затяжку всех крепежных элементов.
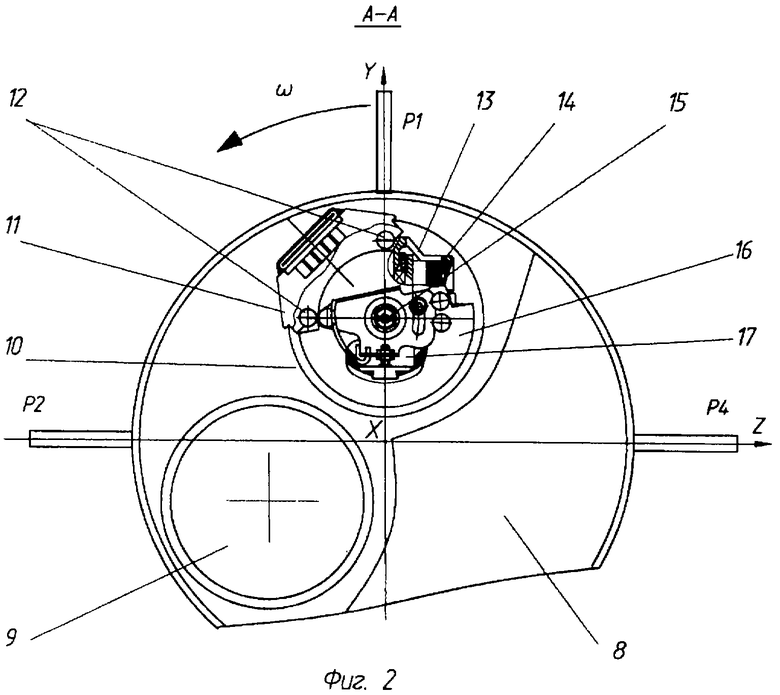
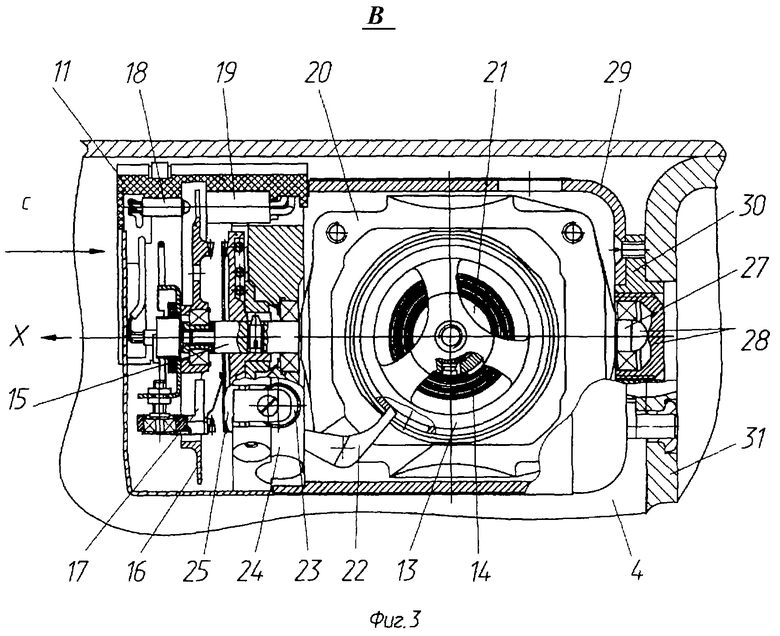
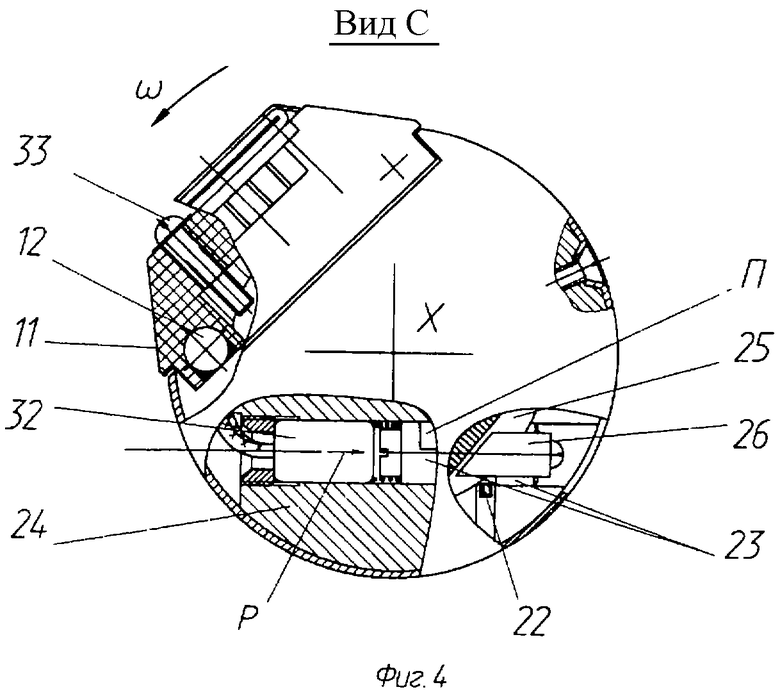
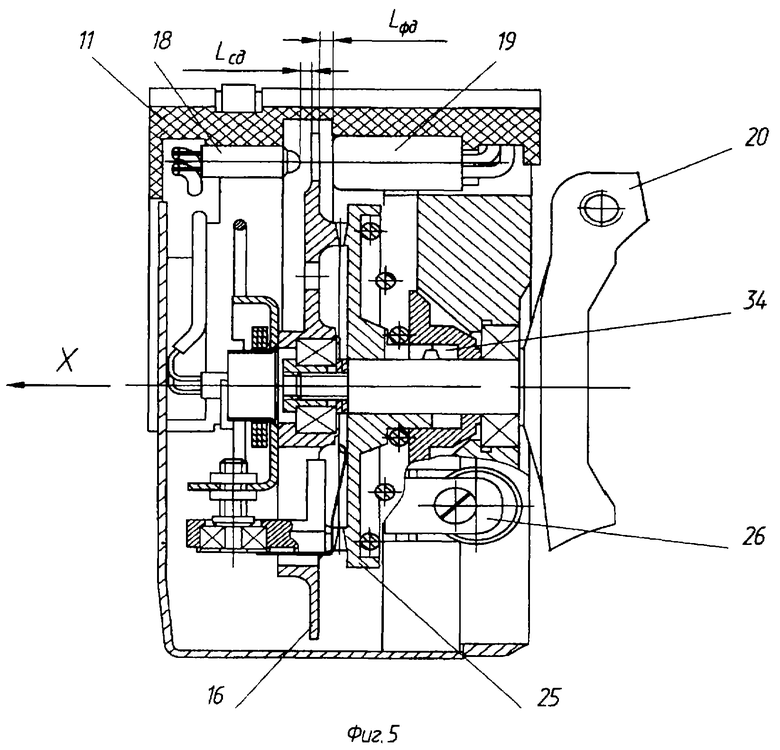
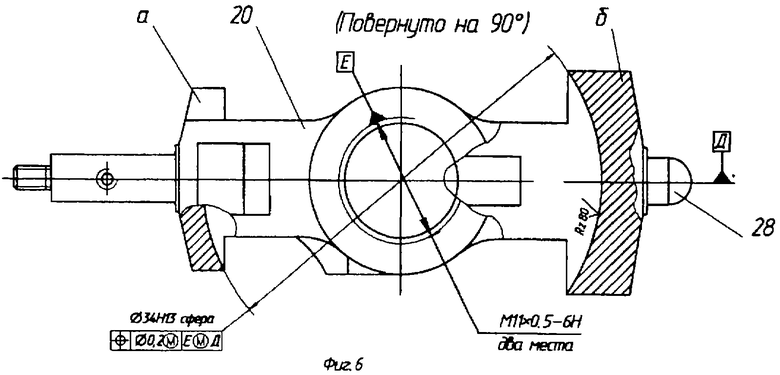
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана схема компоновки боеприпаса; на фиг.2 - разрез А-А по фиг.1 аппаратурного отсека боеприпаса; на фиг.3 - вырыв В в аппаратурном отсеке на фиг.1 с конструкцией гироскопа; на фиг.4 - вид по стрелке С фиг.3 на датчик-вкладыш; на фиг.5 - схема поджатия шторки при действии стартовой перегрузки; на фиг.6 - конструкция наружной рамки, повернутая относительно показанной на фиг.3 на 90°.
Управляемый боеприпас содержит головной обтекатель со взрывателем 1, фиг.1, и лидирующим зарядом 2, рулевой привод 3, аппаратурный отсек 4, боевую часть 5, маршевый двигатель 6 и аэродинамический блок стабилизаторов 7.
Основными узлами аппаратурного отсека 4 являются электронная аппаратура 8, фиг.2, бортовая батарея 9, гироскоп крена 10. Гироскоп в отсеке размещен со смещением относительно продольной оси Х боеприпаса и размещением оптронного датчика 11 на периферии отсека. Датчик состоит из двух оптопар 12, сдвинутых друг относительно друга на 90°. Ось вращения ротора 13 гироскопа направлена по оси Y перпендикулярно продольной оси боеприпаса. Разгон ротора осуществляется посредством спиральной ленточной пружины 14, установленной во внутренней полости ротора. На цапфе 15 наружной рамки гироскопа установлена шторка 16 типа «да-нет», на которой установлен груз 17 маятника.
При вращении корпуса по стрелке ω суммирование в электронной аппаратуре двух сигналов с оптопар за оборот дает сочетание значений, соответствующих двухразрядному коду Грея. Полученная информация об угле крена боеприпаса позволяет выделить синусные и косинусные составляющие сигналов управления и сформировать команды на рулевой привод.
Элементы оптопары, светодиод 18, фиг.3, типа ЗЛ107Б и фотодиод 19 типа КФДМ, направлены встречно друг к другу и их оптические оси совмещены и параллельны оси наружной рамки 20. Ротор 13 со взведенной на втулку внутренней рамки 21 ленточной пружиной 14 зафиксирован от вращения рычагом 22, который установлен на наружной рамке 20 и взаимодействует с ротором 13 и со стержневой защелкой 23, размещенной в основании 24. На цапфе 15 установлена шлицевая подпружиненная зубчатая муфта 25, которая в заарретированном состоянии гироскопа удерживается зацепом 26, укрепленным на стержневой защелке 23.
С противоположной стороны рамки на цапфе 27 выполнен сферический разгрузочный подпятник 28. Корпус 29 гироскопа посредством фланца 30 закреплен на жестком основании 31 аппаратурного отсека 4.
Для запуска гироскопа используется пиротехнический толкатель 32, фиг.4, установленный по оси стержневой защелки 23 в основании 24. Крепление датчика-вкладыша 11 и его регулировка вдоль оси Х и при вращении относительно нее обеспечивается зазорами в крепежных отверстиях винтов, ввернутых в основание 24. При разарретировании гироскопа зубчатая муфта 25, фиг.5, освободившись от защелки 26, под действием собственной пружины перемещается по шлицу 34 до соединения со шторкой 16. При этом происходит соединение шторки с наружной рамкой гироскопа, выбор люфта в подшипнике шторки и его разгрузка от инерционной силы, направленной противоположно стрелке X.
В таком положении при разгрузке шторки муфтой происходит настройка зазоров Lсд - между шторкой и светодиодом и Lфд - между шторкой и фотодиодом с помощью технологических калибров. Стабильность указанных зазоров обеспечивается повышенной жесткостью наружной рамки 20, фиг.6, за счет сферических сегментных оболочек «а» и «б», а также сферического подпятника 28.
Работа предлагаемого устройства, в дополнение к описанию при рассмотрении конструкции, заключается в следующем. После заряжания боеприпаса в ствол пушки со сложенными в размер его оболочки рулями 3 и стабилизаторами 7, фиг.1, производится инициирование бортовой батареи 9, фиг.2 (например, посредством проводной линии связи через донную часть боеприпаса). Электрическое напряжение бортовой батареи вызывает срабатывание пиротехнического толкателя 32, фиг.4, который по стрелке Р перемещает стержневую защелку 23, обеспечивая перемещение рычага арретира 22 через поперечный паз П (показан не в проекции) защелки. Рычаг 22 освобождает ротор 13, фиг.3, после чего он раскручивается под действием пружины 14, а после выхода рычага 22 из основания 24 происходит разарретирование гироскопа. В процессе перемещения защелки 23 по стрелке Р зацеп 26 сходит с зубчатой муфты 25, обеспечивая ей перемещение под действием собственной пружины до зацепления со шторкой 16. Так как шторка ориентируется грузом маятника 17, фиг.2, по вертикали, то в заарретированном положении гироскопа обеспечивается однозначное положение рисунка шторки относительно вертикали. Это положение после разарретирования сохраняется гироскопом и при вращении боеприпаса по крену относительно гироскопа (рисунка шторки) две оптопары позволяют в электронной аппаратуре сформировать двухразрядный код Грея, по которому производится раскладка сигналов управления на вращающиеся рули боеприпаса.
При действии стартовой перегрузки по направлению, противоположному стрелке X, фиг.5, сохраняются гарантированные зазоры Lсд и Lфд за счет поджатия муфты 25 к шторке 16, а также за счет разгрузки рамки 20 сферической опорой 28, фиг.6, и жестких сегментных оболочек «а» и «б» рамки 20 в сочетании с размещением гироскопа и его оптопар на периферии боеприпаса вблизи жестких конструктивных элементов.
Список использованной литературы
1. Управляемый снаряд 9М113 комплекса «Конкурс». Техническое описание и инструкция по эксплуатации. М., Воениздат, 1974 г. - аналог.
2. Выстрел ЗУБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации. ЗУБК10.00.00.000 ТО, стр.16-20, рис.6, 1982 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ БОЕПРИПАСА, УПРАВЛЯЕМЫЙ ВРАЩАЮЩИЙСЯ ПО КРЕНУ БОЕПРИПАС | 2002 |
|
RU2212629C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ БОЕПРИПАСА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2235284C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПУСКА БОЕПРИПАСА ЕГО БОРТОВЫМ ДАТЧИКОМ ДО СТАРТА ПРИ ОТСУТСТВИИ ЭЛЕКТРОПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2224204C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1997 |
|
RU2124696C1 |
| БЛОК УПРАВЛЕНИЯ УПРАВЛЯЕМОГО ВРАЩАЮЩЕГОСЯ СНАРЯДА | 2005 |
|
RU2282135C1 |
| ОТСЕК УПРАВЛЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2176377C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2183817C1 |
| СПОСОБ ИСПЫТАНИЯ НА ПРОЧНОСТЬ АВТОПИЛОТНОГО БЛОКА УПРАВЛЯЕМОГО СНАРЯДА С ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2173829C1 |
| УПРАВЛЯЕМЫЙ ВРАЩАЮЩИЙСЯ СНАРЯД | 2002 |
|
RU2231745C2 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
Группа изобретений относится к управляемым боеприпасам, которые выстреливаются из ствола пушки и предназначены для поражения наземных бронированных целей. Сущность способа защиты чувствительных элементов гироскопа крена управляемого боеприпаса заключается в том, что предварительно компенсируют воздействие стартовых перегрузок встречным усилием поджатия чувствительных элементов гироскопа крена. Размещают чувствительные элементы гироскопа со смещением от продольной оси боеприпаса. Настройку компенсационных зазоров между взаимосвязанными чувствительными элементами гироскопа осуществляют посредством радиального вкладывания чувствительных элементов в гироскоп с возможностью перемещения как вдоль оси боеприпаса, так и по направлению его вращения при юстировке гироскопа относительно рулевого привода. Управляемый вращающийся по крену выстреливаемый из пушки управляемый боеприпас и способ его сборки реализуют описанный способ защиты чувствительных элементов гироскопа крена. Реализация группы изобретений обеспечивает работоспособность боеприпаса при действии значительных (до 6000 ед.) стартовых перегрузок, повышение надежности работы и упрощение конструкции. 3 н.п. ф-лы, 6 ил.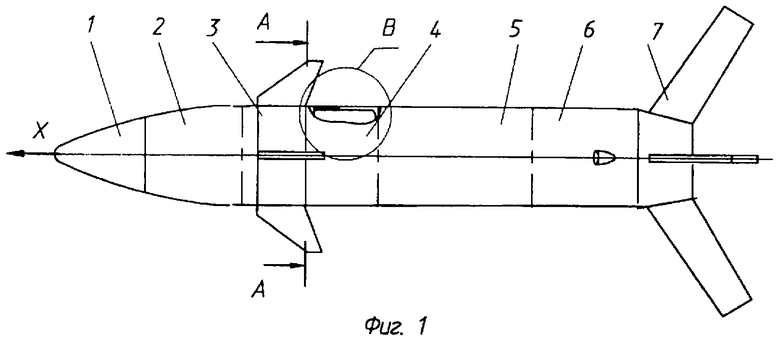
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - М.: Военное издательство, 1982, с.16-20 | |||
| ОТСЕК УПРАВЛЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2176377C2 |
| US 4127243 А, 28.11.1978 | |||
| DE 19828645 A1, 18.11.1999. | |||

