Изобретение относится к оборонной технике, а более конкретно к управляемым снарядам и ракетам, вращающимся в полете.
Известно, что точность стрельбы является одним из самых важных свойств стрелково-пушечного вооружения, что же касается высокоточного вооружения, каким являются современные управляемые снаряды и ракеты, то в настоящее время требования по точности к этим видам вооружения чрезвычайно высоки - вероятность попадания должна быть не менее 80-90%, для сравнения, на образцах аналогичного вооружения 1960-1990 г.г. вероятность попадания соответствовала примерно 70-80%. Спрос на высокоточное вооружение на мировом рынке очень высок, несмотря на его значительную стоимость. Это объясняется тем, что в условиях современной войны даже небольшой контингент войск, оснащенный высокоточным вооружением, может вести успешную войну при минимальных потерях с противником, значительно превосходящим по численности, но не имеющим такого оружия.
Необходимость обеспечения высокой вероятности попадания в цель стала главной причиной ужесточения требований по точности к элементам бортовой системы управления снарядов и ракет, и, в первую очередь, к их гироскопам. Известно, что наиболее слабым звеном гироскопов снарядов и ракет 1970-1980 г.г. были щеточные датчики съема сигнала опорной системы координат в связи с дребезгом их щеток, возникающим в результате вибраций снаряда (ракеты) при полете по траектории.
Этот недостаток устраняется при использовании бесконтактных оптронных датчиков съема сигнала, не чувствительных к вибрациям, однако такие датчики находят применение в основном на вращающихся снарядах и ракетах:в противоположность датчикам гироскопов, используемым на стабилизированных по крену снарядах и ракетах, они чрезвычайно просты по конструкции и очень надежны (например, датчики гироскопов противотанковых франко-германских ракет "Милан" и "ХОТ" [3]), вследствие чего находят все большее применение в современных разработаках.
В известном управляемом снаряде по патенту RU 2183817 С1, 23.10.2000 г. [1](прототип), содержащем корпус с размещенными в нем отсеком управления и боевой частью, хвостовой отсек с аэродинамическими стабилизаторами и гироскоп с бесконтактным датчиком, закрепленный консольно на внутренней стенке хвостового отсека в зоне крепления к нему стабилизаторов и отделенный по своей наружной поверхности от других элементов отсека гарантированным зазором, исключающим соприкосновение гироскопа с этими элементами, датчик гироскопа выполнен в виде оптронных пар, состоящих из излучателей и фотодиодов, и непрозрачного диска с отверстиями, размещенного в зазоре между излучателями и фотодиодами и закрепленного на оси гироузла гироскопа. Для установки на оси гироузла в диске имеется центральное отверстие, другое отверстие в виде паза выполнено концентрично ему, занимает 180° окружности диска и размещено напротив излучателей и фотодиодов датчика. Реализованное таким образом сочетание прозрачной и непрозрачной частей диска выполняет при работе гироскопа роль простейшего растра, с помощью которого оптронный датчик гироскопа формирует сигналы опорной системы координат снаряда в полете. Кроме того установка растра на оси гироузла гироскопа позволяет сохранять неизменным его первоначальное положение перед выстрелом на протяжении всего полете снаряда, чем достигается связь бортовой системы координат снаряда с системой координат наземной аппаратуры наведения, при этом растр своей плоскостью симметрии, проходящей через ось гироузла и середину прозрачной части растра, а также плоскостью, перпендикулярной ей, строго ориентирован вдоль плоскостей курса и тангажа.
Достоинства снаряда по патенту RU 2183817 С1, 23.10.2000 г. очевидны: использование в нем конструкции гироскопа с оптронным датчиком, описанной выше и позволяющей использовать вибрации, возникающие при полете снаряда, для линеаризации моментов трения в опорах гироскопа, обеспечило значительное увеличение времени его работы (что эквивалентно увеличивает дальность управляемого полета снаряда), а также дало возможность увеличить полезную массу снаряда за счет уменьшения габаритов и массы его гироскопа и деталей, служащих для его крепления.
Что же касается недостатков данного управляемого снаряда, к ним следует отнести в первую очередь то, что опорные сигналы, которые выдает оптронный датчик при вращении снаряда в полете, имеют прямоугольную форму, при этом верхний фронт сигналов соответствует световому току фотодиодов, а нижний - темновому току. Эти сигналы, усиленные и преобразованные электронной аппаратурой в команды управления, поступают на исполнительные органы рулевого привода, которые реализуют их в соответствующее отклонения рулей. Однако вследствие своей инерционности рулевой привод запаздывает в исполнении команд, что приводит к фазовому сдвигу в управлении, т.е. рассогласованию по времени команд управления, отрабатываемых рулевым приводом, с фазовыми (угловыми) положениями снаряда относительно его системы координат, в результате снаряд некоторое время, в течение каждого оборота управляется не по курсу, а по тангажу и наоборот.
Другим недостатком, свойственным всем управляемым вращающимся снарядам и ракетам, является наличие связи каналов при их управлении, которая заключается в том, что подъемная сила, действующая на рули рулевого привода, в результате разложения на две составляющие (по курсу и тангажу) создает не только управляющие моменты в соответствии с командами управления, но и паразитные моменты от неэффективной ее составляющей, не имеющие никакого отношения к управлению, величина этих моментов равна "0" только при положениях осей рулей, совпадающих с вертикальной и горизонтальной плоскостями стрельбы.
Совместное влияние на снаряд указанных выше недостатков, а именно: фазового сдвига, паразитных моментов отсвязи каналов, а также скачкообразного характера переключения каналов при использовании опорных сигналов прямоугольной формы приводит к колебаниям снаряда при его полете относительно линии прицеливания. Хотя эти колебания не столь существенны, тем не менее применительно к современному высокоточному оружию они крайне нежелательны, т.к. оказывают ощутимое влияние на точность стрельбы: при их воздействии вероятность попадания в цель снижается, особенно при стрельбе на предельные дистанции по целям, имеющим малые видимые габариты, а также при затрудненных условиях видимости - туманная дымка, сумерки, моросящий снег и дождь и т.п.
Задачей предлагаемого технического решения является устранение указанных выше недостатков управляемого снаряда [1], а именно повышение точности попадания снаряда в цель путем уменьшения его колебательности относительно линии прицеливания при полете по траектории.
Для решения этой задачи в управляемом вращающемся снаряде, содержащем корпус и размещенный в нем отсек управления с рулевым приводом, боевую часть, хвостовой отсек с аэродинамическими стабилизаторами и гироскоп с бесконтактным датчиком в виде оптронной части с закрепленными в ней попарно излучателями и фотодиодами и установленного в пазу между ними растра, закрепленного на оси наружной рамки гироскопа, предстартовое угловое положение оптронной части датчика смещено относительно плоскости, проходящей через ось рулей рулевого привода и продольную ось снаряда, в сторону направления вращения снаряда на угол, равный углу его поворота в полете за время запаздывания исполнения команд управления рулевым приводом, при этом рабочая часть растра разделена на четыре сектора, один из которых прозрачный, второй, диаметрально противоположный, непрозрачный, а два других размещены симметрично между первым и вторым и выполнены в виде чередующихся прозрачных и непрозрачных участков, расположенных концетрично оси растра и радиально к ней, причем поверхности рабочей части растра и паза оптронной части датчика между элементами опотронных пар выполнены с малой отражательной способностью, а размеры прозрачных и непрозрачных участков растра превышают размеры чувствительной поверхности фотодиодов оптронных пар.
Сравнение предлагаемой конструкции управляемого вращающегося снаряда с прототипом показывает целый ряд его преимуществ:
1. За счет смещения предстартового углового положения оптронной части датчика относительно плоскости, проходящей через ось рулей рулевого привода и продольной оси снаряда в сторону вращения снаряда, на угол, равный углу его поворота в полете за время запаздывания исполнения команд управления рулевым приводом, в значительной мере исключается фазовый сдвиг в работе рулевого привода и достигается ее сихнронизация с работой аппаратуры управления снарядом.
2. Изменение конструкции растра и введение в нее чередующихся прозрачных и непрозрачных участков, расположенных между прозрачным и непрозрачным секторами растра, позволяет перейти на синусоидальную форму опорных сигналов системы координат снаряда вместо прямоугольной (в прототипе), что обеспечивает более плавное управление снарядом и в сочетании с компенсацией фазового сдвига в работе рулевого привода сводит до min колебания снаряда при полете относительно линии прицеливания.
3. Уменьшение колебательности снаряда при полете создает более благоприятные условия для оператора-наводчика при слежении за целью, что особенно важно при стрельбе на дальние дистанции в условиях плохой видимости.
Все эти перечисленные выше преимущества управляемого вращающегося снаряда по сравнению с прототипом дают возможность увеличить одну из главных боевых характеристик высокоточного ракетного оружия - вероятность попадания снаряда в цель.
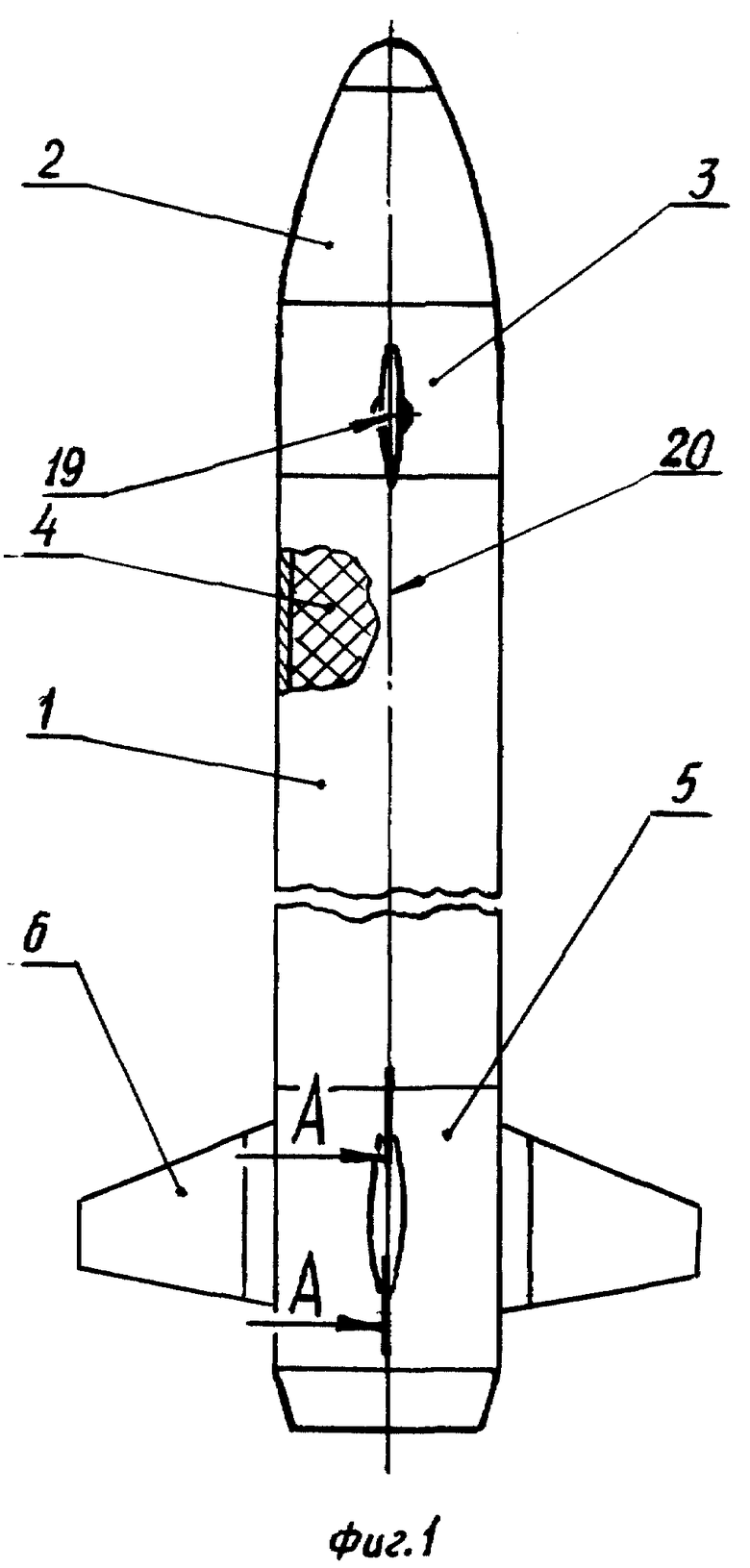
На фиг.1 изображен общий вид управляемого вращающегося снаряда, на фиг.2, 3 - его элементы в увеличенном масштабе, на фиг.4 - графики опорных сигналов оптронной части датчика гироскопа.
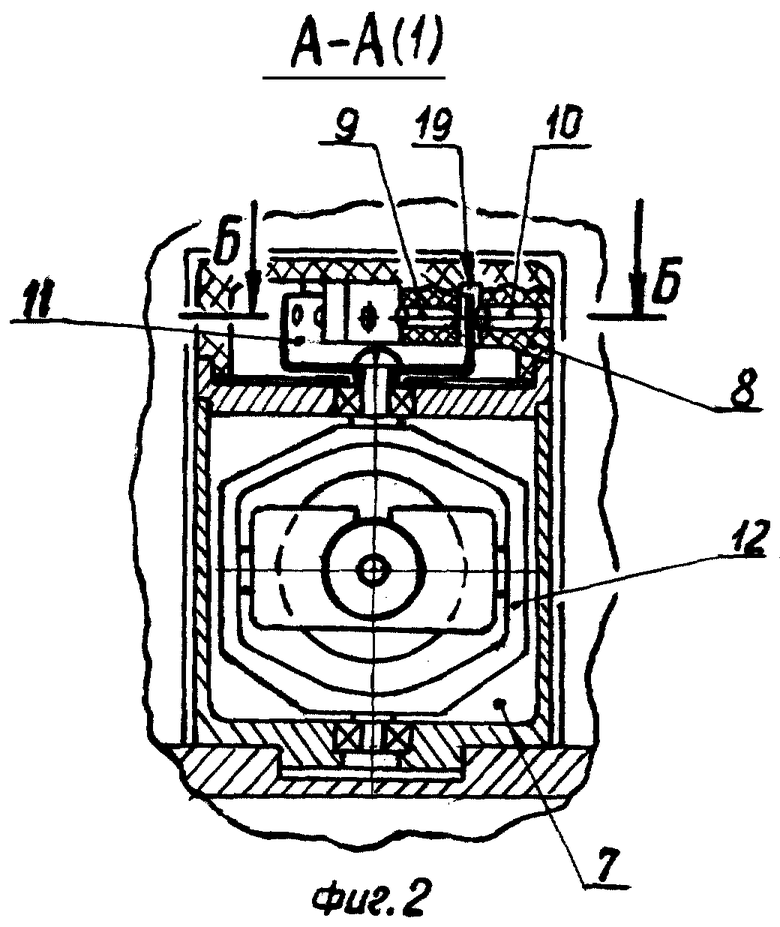
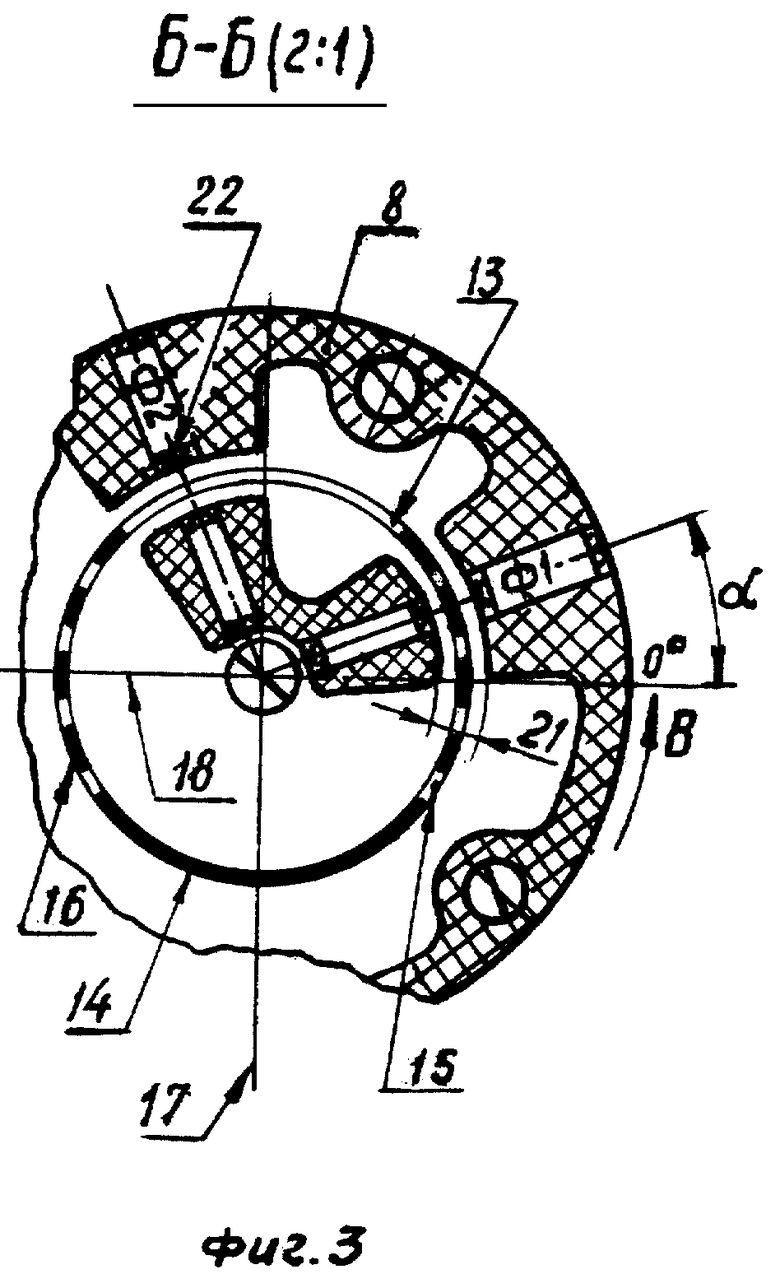
Управляемый вращающийся снаряд состоит из корпуса 1 и размещенного в нем отсека управления 2 с рулевым приводом 3, боевой части 4, хвостового отсека 5 с аэродинамическими стабилизаторами 6. Внутри хвостового отсека установлен гироскоп 7 с бесконтактным датчиком в виде оптронной части 8 и закрепленных в ней оптронных пар, состоящих из светодиодов 9 и фотодиодов 10, установленных соосно и обращенных друг к другу своими оптическими частями, и растра 11, закрепленного на оси наружной рамки гироузла 12 гироскопа. Оптронные пары установлены в оптронной части датчика под углом 90° друг к другу и радиально к оси наружной рамки. Растр представляет собой колпачок со втулкой, с помощью которой он установлен на оси гироузла, рабочая часть растра занимает его периферию и разделена на четыре сектора: прозрачный сектор 13 и диаметрально противоположный ему непрозрачный сектор 14, между ними размещены секторы, состоящие из чередующихся прозрачных и непрозрачных участков 15 и 16.
Расположенные таким образом прозрачные и непрозрачные секторы и участки имеют две оси симметрии 17 и 18, по которым производится угловая ориентация растра относительно оптронной части датчика. В целях уменьшения фазового сдвига в управлении, получаемого в результате запаздывания исполнения команд рулевым приводом, предстартовое угловое положение оптронной части датчика гироскопа смещено относительно плоскости 18, проходящей через ось 19 рулей и продольную ось 20 снаряда, в сторону направления вращения снаряда на угол α, равный углу поворота снаряда при его полете по траектории за время запаздывания исполнения команд рулевым приводом (при этом при расчете угла α берутся средние номинальные значения времени запаздывания и угловой скорости снаряда).
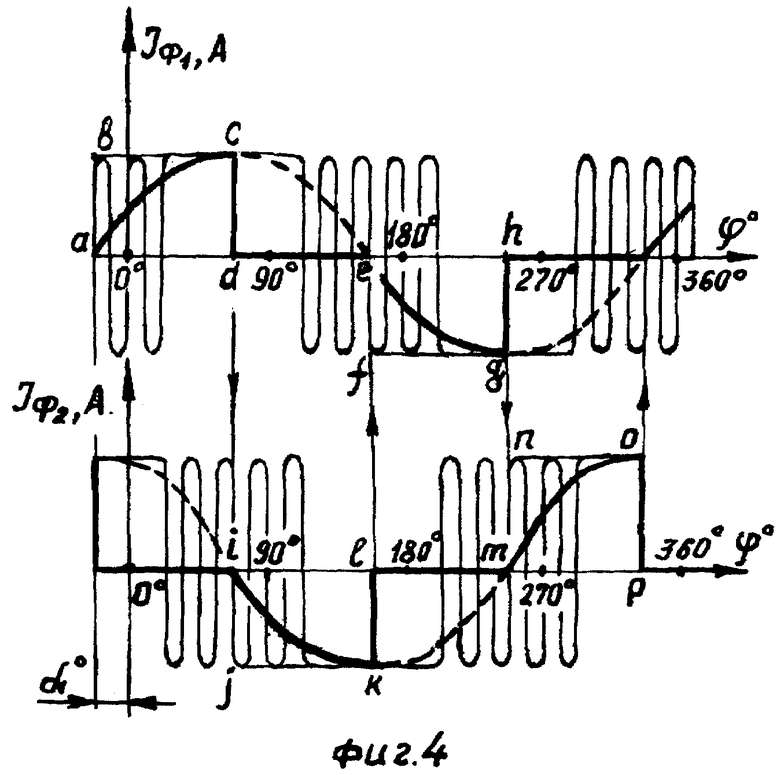
Введение в конструкцию растра зон, размещенных между прозрачными и непрозрачными секторами и состоящих из чередующихся прозрачных и непрозрачных участков, позволяет изменить форму опорных сигналов оптронной части датчика с прямоугольной (как в прототипе) на синусоидальную. На графиках, представленных на фиг.4, тонкими контурными линиями показаны кривые изменения опорных сигналов по курсу и тангажу (при повороте снаряда на один оборот), получаемые с фотодиодов Ф1 и Ф2 оптронной части датчика. Далее аппаратура управления снаряда преобразует эти сигналы в синусоиды (путем разложения в ряд Фурье) и усиливает - жирными контурными линиями изображены преобразованные и усилиенные опорные сигналы, распределенные в соответствии с циклограммой раскладки команд по каналам курса и тангажа, с учетом компенсации фазового сдвига рулевого привода (на угол α).
Для обеспечения стабильности и четкости сигналов, снимаемых с фотодиодов Ф1 и Ф2 оптронной части датчика, рабочая часть растра, а также поверхности паза 21 оптронной части во избежание влияния на сигналы отраженного света и бликов, выполнены матовыми, с малой отражательной способностью (альбедо), для этого рабочая часть растра имеет матовое покрытие черного цвета, а корпус опотронной части изготовлен из пластмассы темного цвета, при этом с поверхностей его паза 21 удален глянец, образующийся при изготовлении корпуса методом прессования.
Кроме того, с этой же целью размеры прозрачных и непрозрачных участков растра выполнены с превышением размеров чувствительной поверхности 22 фотодиодов, чем обеспечивается их полное открытие и перекрытие при работе датчика.
Как уже отмечалось, опорные сигналы в прототипе имеют прямоугольную форму, в предложенной конструкции - синусоидальную. Для удобства их сравнения на графиках фиг.4 они совмещены и обозначены по контуру малыми латинскими буквами. Сравнение показывает, что в прототипе опорные сигналы, изменяющиеся по ломаным кривым abcdefgh... по одному каналу и ijklmnop... - по другому, имеют резкие скачки при переключении каналов (от С до J или от К до f); в предложенной конструкции скачки имеют место только при в выключении каналов (cd или kl), после включения очередного канала (в точке i или e) опорные сигналы изменяются плавно, нарастая по синусоиде от "0" до max (участки ik, eg...), что позволяет учитывать угловое положение рулей рулевого привода относительно плоскостей курса и тангажа, при любом положении снаряда в полете и значительно уменьшить влияние паразитных команд (от связи каналов) в зонах, где опорные сигналы приближаются к "0". В прототипе этого сделать нельзя, т.к. прямоугольные опорные сигналы постоянны на протяжении работы каждого канала и учитывают угловое положение рулей рулевого привода относительно курса и тангажа только при переключении каналов, что приводит к увеличению влияния паразитных команд на управление снарядом.
Функционирование предложенной конструкции управляемого вращающегося снаряда происходит следующим образом.
Перед выстрелом снаряд ориентируется относительно наземной аппаратуры наведения так, что его плоскость 18, проходящая через ось 19 рулей рулевого привода и продольную ось 20 снаряда, занимает горизонтальное положение, при этом оптронная часть 8 датчика гироскопа устанавливается с угловым смещением на угол α относительно плоскости 18 в сторону вращения снаряда в полете. При подаче электрического импульса на запуск гироскопа 7 его ротор раскручивается до большой угловой скорости, после чего происходит разарретирование гироскопа, запитка электрических цепей снаряда и его выстрел из ствола.
После раскрытия аэродинамических стабилизаторов 6 снаряд приобретает вращение вокруг своей продольной оси 20 по стрелке В с заданной частотой. Гироузел 12 с закрепленным на нем растром 11 за счет гироскопического эффекта, создаваемого вращающимся ротором, сохраняет первоначальное предстартовое положение, которое он занимал при запуске гироскопа. Оптронная часть 8, вращаясь вместе со снарядом вокруг неподвижного растра, формирует опорные сигналы системы координат снаряда в соответствии с рисунком растра (на графиках фиг.4 изображены тонкими контурными линиями). Четкость и стабильность их воспроизведения в полете снаряда обеспечивается специальным покрытием и цветом растра и корпуса оптронной части, а также рационально выбранными размерами прозрачных и непрозрачных участков растра. Опорные сигналы датчика преобразуются с помощью аппаратуры управления в синусоиды, усиливаются и разграничиваются по времени действия в соответствии с циклограммой раскладки команд. Как видно из фиг.4, опорные сигналы формируются с опережением вращения снаряда на угол α, что обеспечивает компенсацию фазового сдвига рулевого привода и синхронизирует его работу с функционированием аппаратуры управления. Плавное изменение опорных сигналов (участки ас, ik, eg...) после переключения каналов уменьшает влияние на управление связи каналов, а следовательно, и колебания снаряда при его полете относительно линии прицеливания. Опорные сигналы после суммирования с командами управления подаются на исполнительные органы рулевого привода и реализуются в отклонения рулей.
Проведенные испытания опытных образцов предлагаемой конструкции вращающегося снаряда показали высокую эффективность ее технических решений. При стрельбе на дистанцию 5000 м отклонения точек попадания от точки прицеливания укладываются в формат диаметром 0,65 м, тогда как эта величина в прототипе составляет 0,8 м. Вероятность попадания в цель возросла с 80 до 92%.
Предложенные технические решения найдут применение при разработке ряда управляемых вращающихся снарядов.
Источники информации
1. Патент RU 2183817 С1. 23.10.2000 г. (прототип).
2. Патент RU 2124696 С1, 10.01.1999 г.
3. Латухин А.Н. Противотанковое вооружение, М., Воениздат, 1972 г. стр.221-224.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК УПРАВЛЕНИЯ УПРАВЛЯЕМОГО ВРАЩАЮЩЕГОСЯ СНАРЯДА | 2005 |
|
RU2282135C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2183817C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ БОЕПРИПАСА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2235284C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА НА РАКЕТЕ, ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛА КРЕНА, СПОСОБ ФОРМИРОВАНИЯ СИНУСНОГО И КОСИНУСНОГО СИГНАЛОВ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИНУС-КОСИНУСНЫЙ ФОРМИРОВАТЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТОЙ | 2012 |
|
RU2514606C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| ВРАЩАЮЩАЯСЯ КРЫЛАТАЯ РАКЕТА | 2014 |
|
RU2544446C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| Управляемая ракета | 2022 |
|
RU2772089C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
Изобретение относится к оборонной технике, а более конкретно к управляемым снарядам и пакетам, вращающимся в полете. Технический результат - повышение точности попадания снаряда в цель путем уменьшения его колебательности относительно линии прицеливания при полете по траектории. Снаряд содержит корпус и размещенный в нем отсек управления с рулевым приводом, боевую часть, хвостовой отсек с аэродинамическими стабилизаторами и гироскоп с бесконтактным датчиком в виде оптронной части с закрепленными в ней попарно излучателями и фотодиодами и установленного в пазу между ними растра, закрепленного на оси наружной рамки гироскопа. Предстартовое угловое положение оптронной части датчика смещено относительно плоскости, проходящей через ось рулей рулевого привода и продольную ось снаряда в сторону направления вращения снаряда на угол, равный углу его поворота в полете за время запаздывания исполнения команд управления рулевым приводом. При этом рабочая часть растра разделена на четыре сектора, один из которых прозрачный, второй, диаметрально противоположный ему непрозрачный, а два других размещены симметрично между первым и вторым, и выполнены в виде чередующихся прозрачных и непрозрачных участков, расположенных концентрично оси растра и радиально к ней. Причем поверхности рабочей части растра и паза оптронной части датчика между элементами оптронных пар выполнены с малой отражательной способностью, а размеры прозрачных и непрозрачных участков растра превышают размеры чувствительной поверхности фотодиодов оптронных пар. 2 з.п. ф-лы, 4 ил.
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2183817C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1997 |
|
RU2124696C1 |
| US 4127243, 28.11.1978 | |||
| GB 1332911, 10.10.1973 | |||
| Устройство контроля диаграммы направленности и формы отражающей поверхности антенной системы | 2019 |
|
RU2725514C1 |

