Предлагаемые изобретения относятся к датчикам угла отклонения управляемых боеприпасов от горизонта при его выстреливании из ствола пушки, транспортно-пускового контейнера или с направляющих.
В качестве таких датчиков в основном могут быть использованы гироскопические приборы, измеряющие угол тангажа, или маятниковые устройства. Для измерений угла тангажа может быть использован как свободный гироскоп, создающий базовую систему координат, с осями, неизменно ориентированными в инерциальном пространстве, так и корректируемый гироскоп, приведенный к вертикали места посредством физического маятника - гирогоризонт.
При использовании свободного гироскопа перед пуском необходимо в начале ориентировать горизонтально продольную ось боеприпаса, затем разгонять ротор и разарретировать гироскоп, после чего развернуть пусковую установку с боеприпасом в необходимом направлении выстреливания. При этом полученный угол с датчика тангажа гироскопа будет углом пуска боеприпаса.
При использовании гирогоризонта запуск и разарретирование гироскопа может осуществляться непосредственно после наведения боеприпаса на необходимое направление выстреливания.
Однако в данном случае необходимо сделать задержку в пуске боеприпаса на время, необходимое на приведение гирогоризонта по маятниковому датчику вертикали места.
Использование физического маятника позволяет измерять угол пуска посредством датчика, взаимодействующего с маятником: потенциометра, индукционного, емкостного и др. При измерениях необходимо вводить выдержку времени, необходимую для успокоения колебаний маятника, вызванных воздействиями при наведении боеприпаса.
Основными требованиями, предъявляемыми к указанным датчикам, являются небольшое время готовности к работе (не более 1,5 с), работоспособность при действии больших стартовых перегрузок (до 10000 ед.), простота конструкции и небольшие габариты, работа при отсутствии электропитания на борту боеприпаса, арретирование при нарастании импульса перегрузки.
Известен способ измерения угла пуска гироскопическим прибором и конструкция гироскопического прибора - гирогоризонта [Бабаева Н.Ф. и др. Расчет и проектирование элементов гироскопических устройств. - Л.: Машиностроение, 1967, с. 199. . .206, рис.V.3а], которая содержит корпус, рамку, гиромотор, физический маятник с токосъемником, потенциометр, датчик момента. Способ измерения угла пуска здесь заключается в приведении оси вращения рамки относительно корпуса и оси вращения маятника перпендикулярно плоскости тангажа, ориентации рамки по горизонту физическим маятником и снятие показаний с датчика по оси вращения рамки. Работа устройства заключается в том, что при отклонении корпуса по углу тангажа производится измерение угла маятником и потенциометром, а затем полученный сигнал используется для приведения рамки в горизонт посредством датчика момента по перекрестной оси гироскопа. Учитывая, что при этом сигнал с потенциометра обнуляется, для запоминания можно использовать сигнал с другого датчика по измерительной оси (датчика момента).
Такая конструкция имеет большие габариты, сложна в изготовлении и ненадежна при больших стартовых ускорениях.
Известен способ измерения угла пуска физическим маятником и конструкция физического маятника [Бабаева Н.Ф. и др. Расчет и проектирование элементов гироскопических устройств. - Л.: Машиностроение, 1967, с.208...226, рис.V. 9ж] , которая по технической сути является наиболее близким аналогом (прототипом). Устройство представляет собой жидкостный маятник, который содержит полый цилиндрический корпус, выполненный из тонкостенного изоляционного материала и заполненный почти наполовину ртутью. Ртуть создает маятниковость и ориентируется по вертикали, кроме того, она выполняет функции подвижной обкладки конденсатора, которая является чувствительным элементом датчика угла. Две другие обкладки конденсатора образованы фольгой, наклеенной на корпус. Способ определения угла пуска заключается в приведении оси вращения маятника перпендикулярно плоскости тангажа, ориентации чувствительного элемента датчика угла по вертикали места массой маятника и снятии информации об угле. При повороте корпуса в плоскости тангажа (относительно оси полого цилиндра) происходит изменение площади перекрытия обкладок конденсаторов ртутью и, соответственно, уменьшение емкости одного из конденсаторов и увеличение емкости другого конденсатора. Изменение емкости используется для определения относительного угла поворота корпуса и ртути.
Недостатком данной конструкции является ненадежная работа при вибрационных перегрузках и невозможность фиксации маятника при действии стартовой перегрузки с целью запоминания угла пуска при отсутствии электропитания.
Предлагаемые изобретения актуальны в связи с тем, что позволяют измерить и запомнить угол пуска управляемого боеприпаса при отсутствии электропитания на его борту в момент выстреливания. Такой подход позволяет повысить надежность боеприпаса, так как запуск бортового электрооборудования возможно производить за счет действия стартовой перегрузки и не требуется соединять боеприпас с внешними источниками питания на пусковой установке, что значительно усложняет конструкцию. Измеренный угол пуска позволяет повысить эффективность поражения целей за счет более точного определения времени запуска бортовой аппаратуры управления при решении задач поражения.
Задачей предлагаемых изобретений является точное измерение линейным емкостным датчиком маятника угла пуска боеприпаса в широком диапазоне (до 60o) и запоминание угла посредством механической фиксации маятника, что обеспечивает надежность работы при действии стартового ускорения и упрощает конструкцию боеприпаса; создание датчика угла пуска для боеприпаса как однозначно ориентированного по крену на пусковой установке при его заряжании, так и при произвольной ориентации боеприпаса по крену при заряжании. Очевидно, что во втором случае конструкция датчика угла пуска усложняется за счет необходимости введения второй степени свободы маятника по крену боеприпаса.
Для достижения цели в поставленной задаче в способе определения угла пуска боеприпаса его бортовым датчиком до старта при отсутствии электропитания, заключающемся в приведении оси вращения маятника перпендикулярно плоскости тангажа, ориентации чувствительного элемента датчика угла по вертикали места массой маятника и снятии информации об угле, дополнительно введено следующее:
- после ориентации по вертикали фиксируют маятник инерционной силой от стартового ускорения боеприпаса в начале его действия;
- в процессе фиксации маятника чувствительный элемент датчика освобождают от связи с массой маятника;
- снятие информации об угловом положении осуществляют после старта боеприпаса.
Для достижения цели в поставленной задаче в датчике угла пуска боеприпаса, однозначно ориентированного по крену при заряжании, содержащим корпус в виде неподвижной рамки, физический маятник, емкостный датчик с чувствительным элементом в виде подвижной обкладки конденсатора на оси вращения маятника, введено следующее:
- обкладка емкостного датчика изготовлена в виде сбалансированного диска с окнами;
- диск размещен в центре рамки на опорах вращения перпендикулярно продольной оси боеприпаса и горизонтально;
- неподвижные обкладки емкостного датчика выполнены в виде печатных плат и установлены на внутренних стенках рамки по обе стороны от диска;
- на конце оси вне рамки закреплено вертикально сбалансированное коромысло;
- на коромысле размещен эксцентричный груз маятника на собственной оси с возможностью вращения в горизонтальной плоскости до соприкосновения с рамкой своей эксцентричной стороной;
- эксцентричная сторона груза установлена с зазором L1 параллельно плоскости рамки посредством легкой пружинки с двумя разнесенными точками контакта по его ширине;
- на рамке с зазором L2 от образующей диска размещен радиально ему легко подпружиненный инерционный демпфер с иглообразным наконечником;
- демпфер введен во взаимодействие с инерционным фиксатором демпфера, установленным в корпусе вдоль оси боеприпаса;
- L1=(3...6)L2.
Для достижения поставленной цели в датчике угла пуска, произвольно ориентированного по крену при заряжании боеприпаса, введено следующее:
- рамка установлена свободно на опорах вращения в корпусе относительно продольной оси боеприпаса;
- на рамке размещена плата электронного преобразователя емкости в напряжение;
- на полой цапфе рамки установлен коллектор, кольца которого соединены проводниками через полую цапфу с платой преобразователя емкости;
- инерционный фиксатор диска выполнен в виде подпружиненных стержней, размещенных вдоль оси рамки в корпусе;
- на концах стержней на расстоянии L3 от коллектора укреплен конический захват и изолированные контакты с возможностью взаимодействия при соприкосновении с конической образующей коллектора и колец соответственно;
- на стержнях изготовлены поперечные пазы, взаимодействующие с инерционным демпфером и разрезным пружинным кольцом в проточке корпуса с глубиной до вскрытия стержней и обеспечивающие ход конического захвата и контактов, равный L3.
Предлагаемый способ измерения угла пуска и датчик угла пуска позволяет в широком линейном диапазоне измерять угол пуска и запоминать его во время отсутствия электропитания на борту боеприпаса при его запуске. Съем информации происходит после выстреливания боеприпаса. Используется полученная информация в бортовой аппаратуре при выработке времени запуска аппаратуры управления, обеспечивающем эффективное поражение цели. Способ измерения и устройство для его осуществления могут использоваться как для однозначно ориентированных по крену при заряжании боеприпасов, так и для произвольно ориентированных по крену при заряжании боеприпасов.
Сущностью предлагаемого изобретения является применение сбалансированного чувствительного элемента емкостного датчика, укрепленного на оси вращения маятника. При этом груз маятника на небольшом угле поворота развязан от датчика за счет возможности вращения в горизонтальной плоскости относительно датчика, что позволяет за время движения груза до упора без ошибки механически фиксировать датчик при нарастании перегрузки. Фиксация датчика осуществляется в два этапа: в начале легко подпружиненным инерционным демпфером, а затем стержневым инерционным фиксатором с большим ходом, что исключает его срабатывание при случайных ударах при транспортировании.
На фиг.1 показан общий вид предлагаемого датчика угла пуска; на фиг.2 - разрез А-А по фиг.1; на фиг.3 - разрез Б-Б по фиг.2; на фиг.4 - разрез В-В по фиг.1; на фиг.3 - разрез Г-Г по фиг.2.
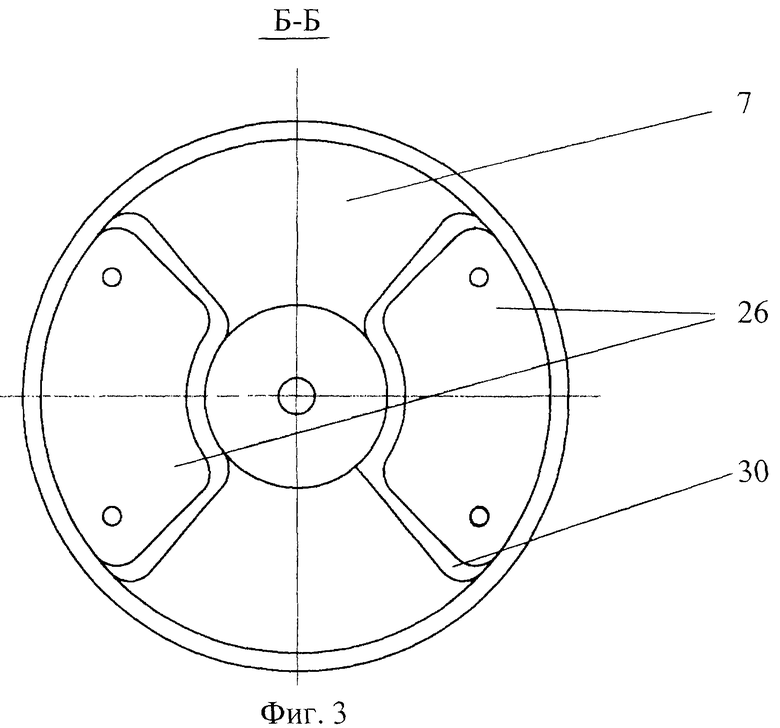
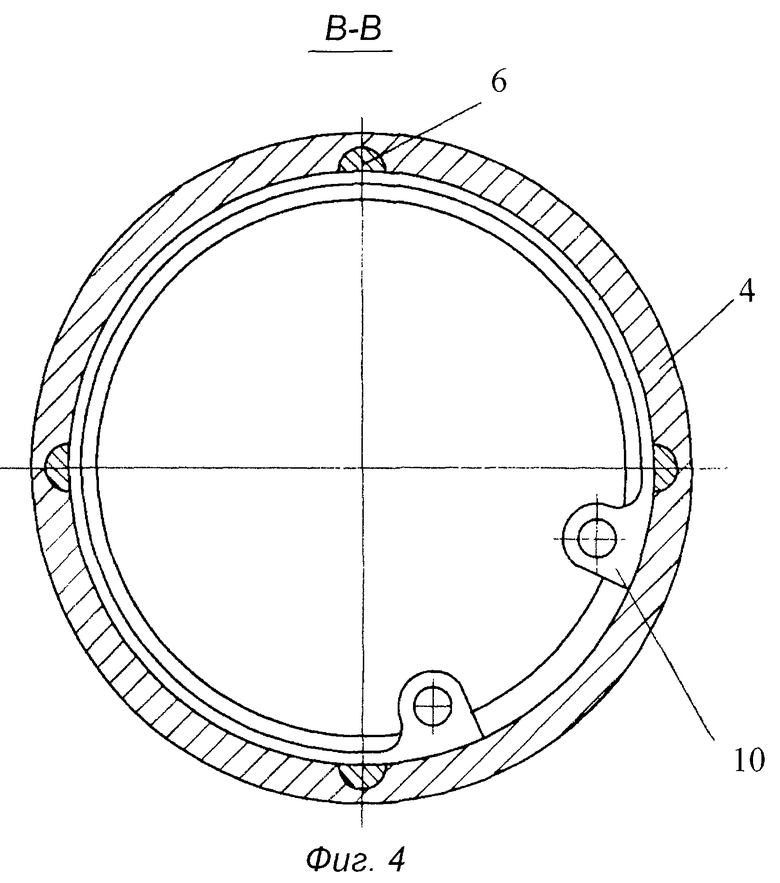
Датчик угла пуска управляемого боеприпаса содержит рамку 1 (фиг.1), которая на подшипниках 2 размещена в основании 3 и корпусе 4. Подшипники 2 разгружены от стартовой перегрузки подпятником П, размещенным в основании 3. В стенках корпуса 4, поджатые пружинами 5, размещены параллельно оси 1-1 рамки инерционные стержни 6. В центре рамки на оси II установлен сбалансированный диск 7, и на расстоянии L2 от него на рамке на плоской пружине 8 закреплен инерционный демпфер 9 с иглообразным наконечником. На стержнях 6 изготовлены поперечные пазы "а", "b", "с", которые взаимодействуют с пружиной 8 инерционного демпфера и разрезным пружинным кольцом 10, который также показан на фиг.4. На полой цапфе "d", фиг.1, рамки укреплен коллектор 11 с кольцами и контактами для подпайки проводников, а на концах стержней размещена цилиндрическая втулка 12 с коническим захватом "е" по образующей коллектора 11. На втулке 12 установлены поджатые пружиной 13 изолированные токосъемники 14.
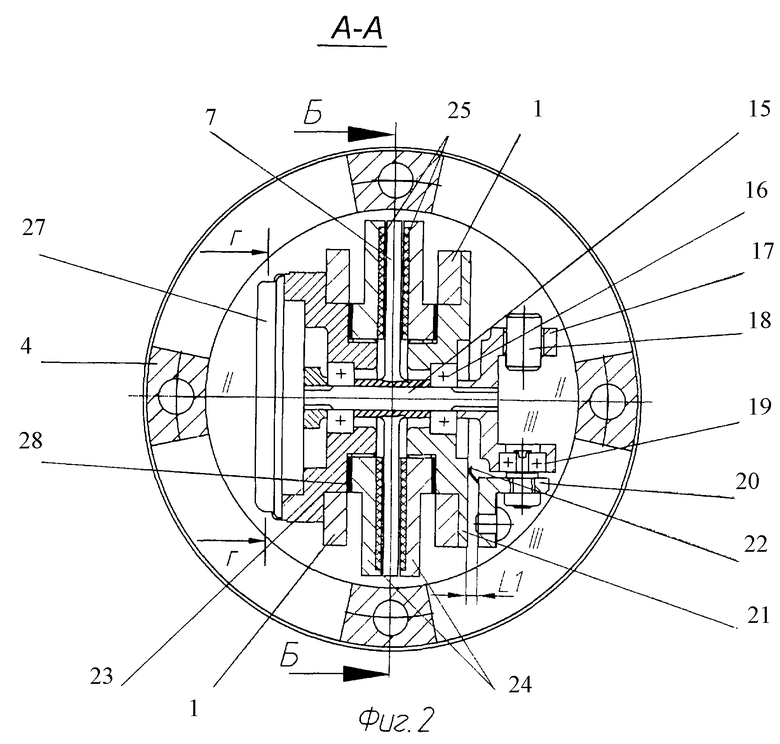
Сбалансированный диск 7 жестко укреплен на валу 15, фиг.2, установленному по оси II-II. На конце вала 15 навинчено с упором во внутреннее кольцо подшипника 16 сбалансированное коромысло 17. На верхнем плече коромысла установлен балансировочный винт 18, а на нижнем плече на подшипнике 19 размещен эксцентричный груз 20, который имеет свободу вращения относительно вертикальной оси III-III в пределах зазора L1 между эксцентричной частью груза и плоскостью втулки 21. Положение груза 20 относительно втулки 21 сориентировано посредством легкой пружинки 22 (см. также фиг.1), которая подведена к поверхности втулки с небольшим зазором (0,05...0,1 мм). Втулки 21 и 23 сцентрированы в рамке 1 совместно с основаниями 24, на которых по обе стороны от диска 7 вклеены печатные платы 25 с обкладками емкостного датчика 26, фиг.3.
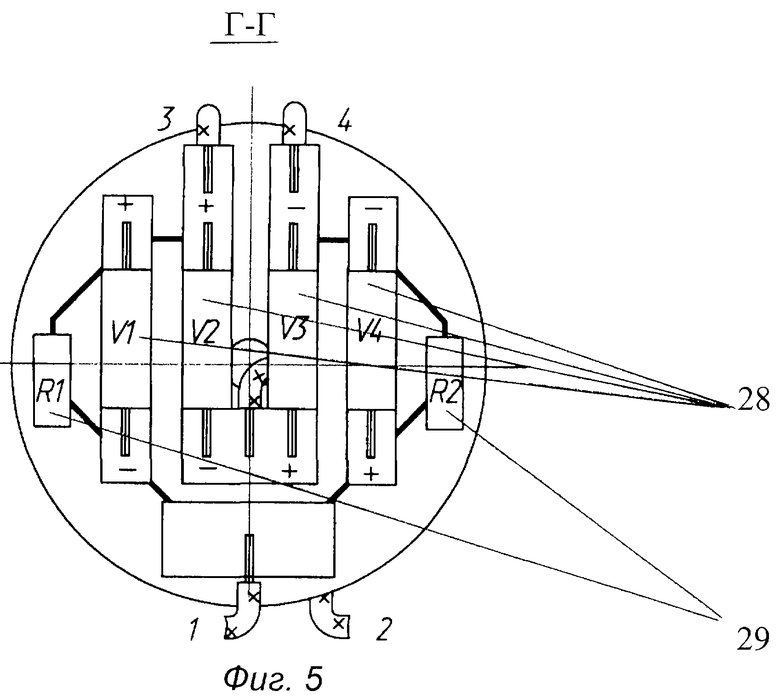
На втулке 23, фиг.2, установлена монтажная плата 27, на которой размещен преобразователь емкости в напряжение, состоящий из диодов 28, фиг.5, и резисторов 29. Проводники "3 и 4" преобразователя 28 соединены с обкладками 26 (фиг. 3) емкостного датчика, а проводники "1 и 2" выведены через полую цапфу "d" на коллектор 11 (фиг.1).
Датчик угла пуска, установленный в боеприпас с расположением оси 1-1, фиг. 1, вдоль продольной его оси и направлением стрелки НП по направлению стрельбы, работает следующим образом. После наведения пусковой установки по направлению стрельбы с углом пуска θ корпус 4 датчика вместе с рамкой 1 и с печатными платами 25 (фиг. 2) емкостного датчика также повернется на указанный угол θ относительно диска 7, который является общей обкладкой двух емкостей 26, фиг. 3, и ориентирован грузом маятника 20. При относительном перемещении диска 7 и обкладок 26, которые в исходном положении установлены против окон 30 диска, происходит увеличение емкости датчика пропорционально углу поворота корпуса 4. Поэтому по изменению емкости при запитке преобразователя 27, соединенного с обкладками емкости 26, электропитанием можно получить информацию об угле поворота корпуса. Однако электропитания на борту боеприпаса в данный момент нет, и возникает необходимость фиксации диска в рассматриваемом состоянии, а информацию об угле пуска снять после действия стартовой перегрузки, когда запускается бортовая батарея.
Фиксация диска происходит под действием инерционной силы, направленной противоположно стартовому ускорению, действующему по стрелке НП. Фиксация диска в самом начале действия ускорения осуществляется иглообразным наконечником инерционного демпфера 9. Для исключения сбоя диск вместе с коромыслом 17 выполнены сбалансированными, а груз маятника 20 развязан на некоторое время от диска с коромыслом за счет обеспечения возможности его вращения по горизонту от инерционной силы в пределах зазора L1. Зазор выбран из условия обеспечения запаздывания по времени касания грузом 20 втулки 21 по отношению к времени вдавливания иглы демпфера в образующую диска. Запаздывание по времени обеспечивается за счет превышения хода груза над ходом демпфера. Так, при практически одинаковых массах и пружинах груза и демпфера равенство L1=(3...6)L2 обеспечивает запаздывание почти в 2 раза.
Для исключения отхода демпфера от диска при спаде ускорения предусмотрена фиксация демпфера инерционным стержнем с большим ходом. Демпфер введен концом пружины 8 в паз "а" инерционного стержня 6, поджатого пружиной 5 и имеющего возможность защелкивания пружинным кольцом 10 в пазу "с". Ход L3 стержня выбран из условия предотвращения несанкционированной фиксации пружинным кольцом 10 при случайных ударных воздействиях на датчик в процессе монтажа и транспортирования.
При выборе хода L3 внутренняя коническая поверхность "е" втулки 12 охватывает коническую образующую корпуса коллектора 11 и связывает рамку 1 с корпусом. Одновременно контакты 14 входят в соприкосновение с токопроводящими кольцами коллектора, и датчик угла пуска подготовлен для снятия с него информации об угле.
Описанная конструкция охватывает наиболее общий случай датчика угла пуска для боеприпаса, который заряжается произвольно, без ориентации по крену. В этом случае возникает необходимость обеспечения второй степени свободы маятника по крену боеприпаса за счет установки рамки на опоры вращения, изготовления полой цапфы рамки, установки на рамку кольцевого коллектора и применения разъемного токосъемника. Такой токосъемник за счет отсутствия момента трения в коллекторе до пуска боеприпаса обеспечивает точную ориентацию маятника по вертикали, а при при стыковке во время действия инерционной силы от стартового ускорения позволяет поджать контакты к коллектору с большой силой, обеспечивающей надежное контактирование при снятии сигнала об угле пуска.
Для однозначно ориентированного по крену боеприпаса при его заряжании второй степени свободы маятнику не требуется, так как для данного случая конструкцией датчика и боеприпаса предусматривается ориентация плоскости вращения маятника по вертикали. В данном случае из конструкции исключается установка рамки на опоры вращения - рамка и корпус выполняются заодно, также не требуется коллектор и токосъемник, а принцип работы датчика угла остается без изменений. Выходные сигналы с проводников "1 и 2" преобразователя, фиг. 5, непосредственно поступают в аппаратуру управления боеприпаса.
Таким образом, совокупность признаков предлагаемого датчика угла пуска боеприпаса показывает, что способ и устройство позволяет с помощью маятника и емкостного датчика точно измерить в широком диапазоне угол пуска управляемого боеприпаса и запомнить его при отсутствии электропитания на борту в момент выстреливания путем механической фиксации маятника. Такой подход позволяет повысить надежность боеприпаса, так как запуск бортового электрооборудования возможно производить за счет действия стартовой перегрузки, и не требуется соединять боеприпас с внешними источниками питания на пусковой установке, что также значительно усложняет конструкцию. Измеренный угол пуска позволяет повысить эффективность поражения целей за счет более точного определения времени запуска бортовой аппаратуры управления при решении задач поражения.
Кроме того, изобретение охватывает создание датчика угла как для боеприпаса, ориентированного однозначно по крену на пусковой установке при его заряжании, так и при произвольной ориентации боеприпаса по крену при заряжании. Очевидно, что во втором случае конструкция датчика угла усложняется за счет необходимости введения второй степени свободы маятника по крену боеприпаса.
Размеры датчика приемлемы для малогабаритных управляемых боеприпасов. Диаметр и длина равны 48 мм и 70 мм. Масса 150 г.
Изобретение относится к измерительным приборам, в частности к датчикам угла отклонения управляемого боеприпаса от горизонта при его выстреливании. Сущность способа: после ориентации по вертикали чувствительного элемента датчика угла фиксируют маятник инерционной силой от стартового ускорения боеприпаса в начале его действия. В процессе фиксации маятника чувствительный элемент датчика освобождают от связи с массой маятника, причем снятие информации об угловом положении осуществляют после старта боеприпаса. В датчике угла пуска боеприпаса, однозначно ориентированного по крену при заряжании, обкладка емкостного датчика изготовлена в виде сбалансированного диска с окнами, который размещен в центре рамки на опорах вращения перпендикулярно продольной оси боеприпаса и горизонтально. Неподвижные обкладки емкостного датчика выполнены в виде печатных плат и установлены на внутренних стенках рамки по обе стороны от диска. На конце оси вне рамки закреплено вертикально сбалансированное коромысло, на котором размещен эксцентричный груз маятника на собственной оси с возможностью вращения в горизонтальной плоскости до соприкосновения с рамкой своей эксцентричной стороной, которая установлена с зазором L1 параллельно плоскости рамки посредством легкой пружинки с двумя разнесенными точками контакта по его ширине. На рамке с зазором L2 от образующей диска размещен радиально ему легко подпружиненный инерционный демпфер с иглообразным наконечником, который введен во взаимодействие с инерционным фиксатором диска, установленным в корпусе вдоль оси боеприпаса, при этом L1=(3...6)L2. В датчике угла пуска боеприпаса, произвольно ориентированного по крену при заряжании, рамка установлена свободно на опорах вращения в корпусе относительно продольной оси боеприпаса. На рамке размещена плата электронного преобразователя емкости в напряжение. На полой цапфе рамки установлен коллектор, кольца которого соединены проводниками через полую цапфу с платой преобразователя емкости. Инерционный фиксатор демпфера выполнен в виде подпружиненных стержней, размещенных вдоль оси рамки в корпусе. На концах стержней на расстоянии L3 от коллектора укреплены конический захват и изолированные контакты с возможностью взаимодействия при соприкосновении с конической образующей коллектора и колец соответственно. На стержнях изготовлены поперечные пазы, взаимодействующие с инерционным демпфером и разрезным пружинным кольцом в проточке корпуса с глубиной до вскрытия стержней и обеспечивающие ход конического захвата и контактов, равный L3. Техническим результатом изобретений является повышение точности измерения угла пуска боеприпаса, обеспечение надежности работы при действии стартового ускорения и упрощение конструкции боеприпаса. 3 н.п.ф-лы, 5 ил.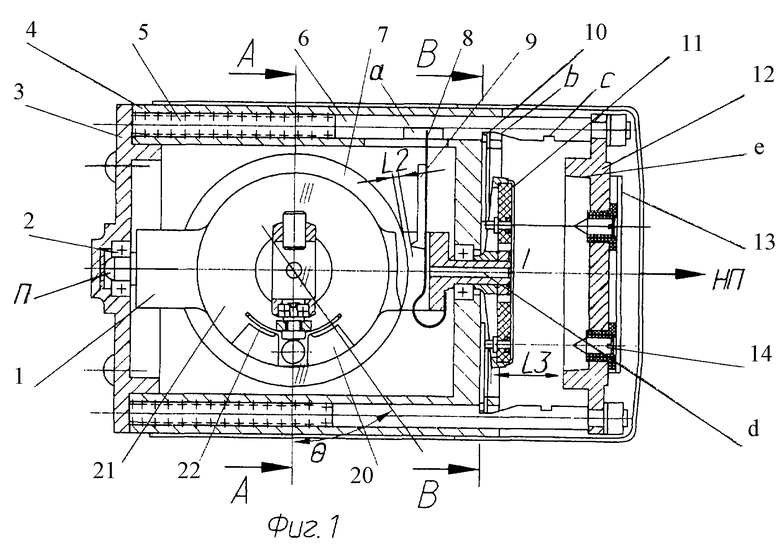
| Бабаева Н.Ф | |||
| и др | |||
| Расчет и проектирование элементов гироскопических устройств | |||
| - Л.: Машиностроение, 1967, с | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1999 |
|
RU2165581C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ИСТИННОГО УГЛА ВЫЛЕТА ИЗДЕЛИЯ ИЗ ТРУБЫ | 1995 |
|
RU2095727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО УГЛА ВЫЛЕТА БОЕПРИПАСА ИЗ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2092771C1 |
| US 4383474, 17.05.1983 | |||
| РАБОЧАЯ ЖИДКОСТЬ ВАКУУМНОГО НАСОСА | 1991 |
|
RU2011026C1 |
| DE 3643197 A1, 23.06.1988 | |||
| DE 3243000 A1, 24.05.1984. | |||

