Настоящее изобретение относится, в целом, к определению местоположения, более конкретно к методам, обеспечивающим оценку местоположения терминала в системе радиосвязи, на основании идентифицирующих кодов, назначенных источникам передач, таким как ретрансляторы.
Обычным способом для определения местоположения терминала является определение количества времени, необходимого сигналам, переданным из множества передатчиков в известных местоположениях, чтобы достичь терминала. Одной системой, которая обеспечивает сигналы из множества передатчиков в известных местоположениях, является широко известная глобальная спутниковая система позиционирования (GPS, ГСП). Спутники в системе ГСП расположены на точных орбитах в соответствии с главным планом ГСП. Местоположение спутников ГСП можно определить с помощью различных наборов информации (обычно известных как "Almanac" и "Ephemeris"), передаваемых самими спутниками. Другой системой, которая обеспечивает сигналы из передатчиков (например, базовых станций) в известных местоположениях на земле, является система радиосвязи (например, с помощью сотового телефона).
Многие системы радиосвязи используют ретрансляторы, чтобы обеспечить зону обслуживания для назначенных областей в системе, или, чтобы расширить зону обслуживания системы. Например, ретранслятор может использоваться для того, чтобы покрыть определенную область, не покрытую базовой станцией из-за обстоятельств замирания (например, "дыра" в системе). Ретрансляторы также могут использоваться для того, чтобы расширить зону обслуживания в сельские районы (например, вдоль автострад), которые находятся вне зоны обслуживания базовых станций. Ретранслятор принимает, обрабатывает и передает сигналы как по прямой линии связи (т.е. маршрут из базовой станции в подвижное устройство), так и по обратной линии связи (т.е. маршрут из подвижного устройства в базовую станцию).
При определении местоположения терминала в системе, в которой используются один или более ретрансляторов, сталкиваются с различными проблемами. Обычно сигнал исходной базовой станции обрабатывается и повторно передается ретранслятором с относительно большой мощностью и с задержкой. Сочетание большой мощности передаваемого сигнала с изоляцией, обычно связанной с зоной обслуживания ретранслятора, часто препятствует приему других сигналов из других базовых станций. Кроме того, во многих случаях, в которых используются ретрансляторы (например, внутри зданий, туннелей, метро и т.д.), сигналы из спутников ГСП имеют недостаточные уровни мощности, чтобы приниматься терминалами. В этом случае ограниченное число сигналов (возможно, один сигнал из ретранслятора) может быть доступным для использования, чтобы определить местоположение терминала. Кроме того, дополнительные задержки, вносимые ретрансляторами, могут искажать результаты измерений задержки из-за подтверждения приема/времени прибытия (RTD, ЗПП/TOA, ВП), а также результаты измерений TDOA, РВП (разность времени прибытия), что потом имеет результатом неточную оценку местоположения на основании этих результатов измерений.
Фиг. 1 - схема системы 100 радиосвязи, которая использует ретрансляторы в соответствии с раскрытыми способом и устройством. Система 100 может быть сконструирована таким образом, чтобы соответствовать одному или более широко известным промышленным стандартам, таким как IS-95, опубликованным Ассоциацией промышленности средств связи/Ассоциацией электронной промышленности (TIA/EIA), и другим таким промышленным стандартам для систем, таких как W-CDMA, Ш-МДКР (широкополосный множественный доступ с кодовым разделением), cdma2000 или их комбинаций. Система 100 включает в себя ряд базовых станций 104. Каждая базовая станция обслуживает определенную зону 102 обслуживания. Несмотря на то, что на фиг. 1А для простоты изображены только три базовые станции с 104а по 104с, специалисты в данной области техники поймут, что обычно имеется значительно больше таких базовых станций в системе. Для цели этого раскрытия базовая станция и ее зона обслуживания совместно упоминаются как "ячейка".
Один или более ретрансляторов 114 могут использоваться системой 100 для того, чтобы обеспечить зону обслуживания для областей, которые не были бы иначе покрыты базовой станцией (например, из-за обстоятельств замирания, такие как область 112а, изображенная на фиг 1А), или для того, чтобы расширить зону обслуживания системы (такие как области 112b и 112с). Например, ретрансляторы обычно используются для того, чтобы улучшить зону обслуживания внутри помещений для сотовой системы при относительно малых затратах. Каждый ретранслятор 114 соединяется с "обслуживающей" базовой станцией 102 через линию радиосвязи или линию проводной связи (например, через коаксиальный или волоконно-оптический кабель), либо непосредственно, либо через другой ретранслятор. Любое число базовых станций в системе может быть повторено в зависимости от конкретной конструкции системы.
Ряд терминалов 106 обычно рассредоточены по всей системе (на фиг. 1А для простоты изображен только один терминал). Каждый терминал 106 может взаимодействовать с одной или более базовых станций по прямой и обратной линиям связи в любой момент в зависимости от того, поддерживается ли или нет системой мягкая передача обслуживания, и, находится ли действительно или нет терминал в мягкой передаче обслуживания. Специалисты в данной области техники поймут, что "мягкая передача обслуживания" относится к состоянию, в котором терминал находится на связи более чем с одной базовой станцией одновременно.
Несколько базовых станций 104 обычно соединены с одним контроллером 120 базовой станции (BSC, КБС). КБС 120 координирует связь для базовых станций 104. Для цели определения местоположения терминала контроллер 120 базовой станции также может быть соединен с элементом 130 определения местоположения (PDE, ЭОМ). ЭОМ 130 принимает результаты измерений времени и/или идентифицирующие коды из терминалов и обеспечивает управляющую и другую информацию, связанную с определением местоположения, как описано более подробно ниже.
Для определения местоположения терминал может измерять времена прибытия передач сигналов из нескольких базовых станций. Для сети МДКР эти времена прибытия могут быть определены из фаз кодов псевдошума (PN, ПШ), используемых базовыми станциями для того, чтобы расширить свои данные перед передачей в терминалы через прямую линию связи. Фазы ПШ, обнаруженные терминалом, затем могут быть сообщены в ЭОМ (например, через передачу сигналов IS-801). Затем ЭОМ использует сообщенные результаты измерений фазы ПШ для того, чтобы определить псевдодиапазоны, которые затем используются для того, чтобы определить местоположение терминала.
Местоположение терминала также может быть определено с использованием гибридной схемы, при этом времена прибытия сигналов (т.е. времена прибытия (ВП)) измеряются для любой комбинации базовых станций 104 и спутников 124 глобальной системы позиционирования (ГСП). Результаты измерений, полученные из спутников ГСП, могут использоваться как первичные результаты измерений или, чтобы дополнить результаты измерений, полученных из базовых станций. Результаты измерений из спутников ГСП обычно являются более точными, чем результаты измерений из базовых станций. Однако обычно необходима линия связи прямой видимости до спутника, чтобы принимать сигналы ГСП. Таким образом, использование спутников ГСП для определения местоположения обычно ограничено окружающей средой вне помещений, где не присутствуют препятствия. Сигналы ГСП обычно не могут приниматься внутри помещений или в других окружающих средах, где имеются препятствия, такие как листва или здания. Однако ГСП имеет расширенную зону обслуживания, и четыре или более спутников ГСП потенциально могут приниматься фактически отовсюду, где нет таких препятствий.
Наоборот, базовые станции обычно расположены в населенных районах, и их сигналы могут проникать через некоторые здания и препятствия. Следовательно, возможно использовать базовые станции в городах и, возможно, в зданиях, чтобы определять местоположение устройств, которые могут принимать и/или передавать такие сигналы. Однако результаты измерений, полученные из базовых станций, обычно являются менее точными, чем результаты измерений из спутников ГСП, поскольку множество сигналов может приниматься в терминале из конкретной базовой станции благодаря эффекту, известному как "множественный маршрут". Множественный маршрут относится к ситуации, в которой сигналы принимают через множество маршрутов передачи между передатчиком и приемником. Такие множественные маршруты генерируют с помощью сигналов, отражаемых от различных объектов, таких как здания, горы и т.д. Следует заметить, что в наилучшем случае сигнал также принимают по прямому маршруту (прямой линии) из передатчика в приемник. Однако это необязательно может быть справедливо.
В гибридной схеме каждая базовая станция и каждый спутник ГСП представляет источник передачи. Для того чтобы определить двумерную оценку местоположения терминала, принимают и обрабатывают передачи из трех и более не расположенных на одной линии в пространстве источников. Четвертый источник может использоваться для того, чтобы обеспечить абсолютную высоту (третье измерение), а также может обеспечить повышенную точность (т.е. уменьшенную неопределенность в измеренных временах прибытия). Времена прибытия сигналов могут быть определены для источников передач и использованы для того, чтобы вычислить псевдодиапазоны, которые затем могут быть использованы (например, посредством способа трех сторон) для того, чтобы определить местоположение терминала. Определение местоположения может быть выполнено с помощью широко известных средств, таких как описано в документах стандартов 3GPP 25.305, TIA/EIA/IS-801 и TIA/EIA/IS-817.
В примере, изображенном на фиг. 1А, терминал 106 может принимать передачи из спутников 124 ГСП, базовых станций 104 и/или ретранслятора 114. Терминал 106 измеряет времена прибытия сигналов передач из этих передатчиков и может сообщать результаты этих измерений в ЭОМ 130 через КБС 120. Затем КБС 120 может использовать результаты измерений для того, чтобы определить местоположение терминала 106.
Как замечено выше, ретрансляторы могут использоваться для того, чтобы обеспечить зону обслуживания для областей, не покрытых базовыми станциями, таких как внутри зданий. Ретрансляторы являются более дешевыми, чем базовые станции и преимущественно могут быть развернуты там, где не требуется дополнительная емкость. Однако ретранслятор связан с дополнительными задержками из-за схем в ретрансляторе и кабельной системы и/или дополнительной передачи, связанной с ретранслятором. В качестве примера, фильтры поверхностных акустических волн (SAW, ПОВ), усилители и другие компоненты в ретрансляторе вносят дополнительные задержки, которые сравнимы с задержками передачи из базовой станции в терминал, или даже могут быть больше, чем эти задержки. Если задержки ретранслятора не принимаются во внимание, тогда результаты измерений времени сигналов из ретрансляторов не могут быть достоверно использованы для того, чтобы определить местоположение терминала.
Фиг. 1В - схема, иллюстрирующая использование ретранслятора 114х для того, чтобы обеспечить зону обслуживания внутри помещений для здания 150. В изображенном примере ретранслятор 114х содержит главное устройство (MU, ГУ) 115, соединенное с рядом дистанционных устройств (RU, ДУ) 116. По прямой линии связи главное устройство 115 принимает один или более сигналов из одной или более базовых станций и ретранслирует все или подмножество принятых сигналов в каждое из дистанционных устройств. А по обратной линии связи главное устройство 115 принимает, объединяет и ретранслирует сигналы из дистанционных устройств 116 для передачи по обратной линии связи назад в одну или более базовых станций. Каждое дистанционное устройство 116 обеспечивает зону обслуживания для определенной области (например, одного этажа) здания и ретранслирует сигналы прямой и обратной линий связи для своей зоны обслуживания.
При оценке местоположения терминала, расположенного внутри здания, где ретранслятор может быть использован для того, чтобы обеспечить зону обслуживания, сталкиваются с различными проблемами. Во-первых, во многих применениях внутри помещений терминалы не могут принимать сигналы из базовых станций или спутников ГСП или могут принимать сигналы из меньшего числа передатчиков, чем необходимо для того, чтобы выполнить способ трех сторон. Для того чтобы обеспечить зону обслуживания внутри здания, ретранслятор обычно ретранслирует сигнал из одной базовой станции с относительно большой мощностью и с задержкой. Сочетание большой мощности ретранслированного сигнала с изолированным местоположением внутри помещения терминала обычно препятствует приему терминалом других сигналов из других базовых станций и спутников.
Во-вторых, если величина задержки, внесенной ретранслятором, не известна, тогда сигнал из ретранслятора не может быть достоверно использован как один из сигналов для способа трех сторон. Тогда это препятствует использованию элементом (например, ЭОМ или терминалом) ретранслированного сигнала для того, чтобы получить оценку местоположения с помощью этого сигнала без сигнала спутника или базовой станции. В-третьих, во многих окружающих средах, где используются ретрансляторы (например, метро, здания и т.д.), сигналы ГСП не могут приниматься даже, когда терминал использует устройство приемника с повышенной чувствительностью. И, в-четвертых, элемент, используемый для того, чтобы определить местоположение терминала, не имеет способа определения того, использовал ли терминал неправильный указатель синхронизации (из-за неопределенной задержки ретранслятора), что будет влиять на точность результатов измерений задержки из-за подтверждения приема (ЗПП) и метки времени в измерениях ГСП.
Следовательно, имеется потребность в данной области техники в решениях, предназначенных для того, чтобы обеспечить оценку местоположения терминала в системе радиосвязи, которая использует ретрансляторы (или другие источники передачи с аналогичными характеристиками).
Раскрытые в настоящем описании способ и устройство определяют местоположение терминала, взаимодействующего через ретранслятор в системе радиосвязи. С помощью раскрытых способа и устройства признают, что ретрансляторы, используемые для того, чтобы обеспечить зону обслуживания в помещениях, обычно предназначены для того, чтобы покрывать относительно малые географические области (например, здание, этаж здания и т.д.). Если зона обслуживания ретранслятора мала, оценка местоположения для терминала в зоне обслуживания ретранслятора может быть сообщена как обозначенное местоположение в этой зоне обслуживания, которое может быть центром зоны обслуживания. Во многих (если не в большинстве) случаях эта сообщенная оценка местоположения для терминала находится в пределах 50 метров от фактического местоположения терминала. Эта точность достаточна для усовершенствованной службы спасения 911 (Е-911), утвержденной приказом Федеральной комиссией по связи (FCC, ФКС).
В соответствии с одним вариантом осуществления раскрытых способа и устройства, идентифицирующий код, однозначно связанный с каждым ретранслятором, посылают с помощью каждого ретранслятора в определенной зоне обслуживания (например, ячейке). Идентифицирующий код затем может быть использован терминалом (или ЭОМ) для того, чтобы однозначно идентифицировать ретранслятор. В качестве идентифицирующих кодов могут использоваться различные типы кодов. В одном варианте осуществления идентифицирующие коды содержат псевдошумовые (ПШ) последовательности при определенных смещениях, которые специально зарезервированы для идентификации ретранслятора.
Для случаев, когда ретрансляторы покрывают малые географические области, идентификация конкретного ретранслятора, через который был принят сигнал, может быть использована для того, чтобы оценить местоположение терминала, например, как центр зоны обслуживания ретранслятора. Для случаев, когда ретрансляторы покрывают большие области, идентификация конкретного ретранслятора, через который был принят сигнал, может быть использована для того, чтобы скорректировать результаты измерений в соответствии с задержкой ретранслятора.
В другом варианте осуществления идентифицирующий код для каждого ретранслятора передают с использованием сигнала широкого спектра. Этот сигнал идентификатора широкого спектра может быть составлен таким образом, чтобы иметь минимальное влияние на функционирование системы МДКР, и может быть восстановлен аналогичным способом, как модулированный сигнал прямой линии связи, переданный из базовой станции или ретранслятора. В этом способе не требуется никакого дополнительного аппаратного обеспечения для терминала, чтобы восстанавливать сигнал идентификатора. В одном варианте осуществления сигнал идентификатора широкого спектра генерируют в соответствии со стандартом IS-95 МДКР, и он согласуется с этим стандартом.
Еще в одном варианте осуществления раскрытых способа и устройства, когда определяют, что сигнал должен пройти через ретранслятор, этот сигнал не используют в вычислениях определения местоположения. Это обеспечивает простой и не дорогой способ, чтобы гарантировать, что задержка, которая добавляется к времени прохождения сигналов из базовой станции в терминал, не вызовет ошибку в вычислениях определения местоположения. То есть, поскольку задержка распространения между моментом времени, когда сигнал передается из базовой станции, и моментом времени, когда сигнал принимается терминалом, будет не точно отражать расстояние между базовой станцией и терминалом, эта задержка не должна быть использована в вычислениях определения местоположения. Если имеется дополнительная информация относительно идентичности ретранслятора, через который прошел сигнал, и местоположения этого ретранслятора, тогда эта информация может быть использована в вычислении. Однако следует заметить, что может быть достаточно информации из других сигналов, которые не проходят через ретрансляторы, чтобы сделать возможным вычислить местоположение терминала без использования информации из сигналов, которые действительно проходят через ретранслятор. В любом случае важно, что факт того, что сигнал, прошедший через ретранслятор, известен, так, чтобы дополнительная задержка, вносимая в сигнал ретранслятором, могла быть принята во внимание, либо с помощью не использования информации синхронизации для этого сигнала, либо с помощью корректировки этой информации синхронизации соответствующим образом.
Способы, описанные в настоящем описании, могут быть использованы в различных системах МДКР (например, в системах, которые соответствуют следующим промышленным стандартам: IS-95, cdma2000, W-CDMA, IS-801) и в различных системах не МДКР (например, GSM, ГСМК (глобальная система мобильных коммуникаций), TDMA, МДВР (множественного доступа с временным разделением), аналоговые и т.д.).
Признаки, сущность и преимущества раскрытых способа и устройства станут более понятными из подробного описания, изложенного ниже, взятого совместно с чертежами, на которых одинаковые ссылочные символы соответственно указаны по всем чертежам, и на которых:
фиг. 1А - схема системы радиосвязи, которая использует ретрансляторы, и может реализовывать различные аспекты и варианты осуществления раскрытых способа и устройства;
фиг. 1В - схема, иллюстрирующая использование ретранслятора для того, чтобы обеспечить зону обслуживания для здания;
фиг. 2 - схема, изображающая индексы для ПШ последовательности, используемой для того, чтобы генерировать указатели пилот-сигнала и расширять данные в базовой станции;
фиг. 3 - схема варианта осуществления ретранслятора, который может реализовать один вариант осуществления раскрытых способа и устройства;
фиг. 4А по фиг. 4С изображают три варианта осуществления модуля, который может быть использован для того, чтобы генерировать и объединять сигнал идентификатора с модулированным сигналом прямой линии связи для того, чтобы обеспечить объединенный сигнал;
фиг. 5А - схема, изображающая сигналы, которые могут быть приняты из дистанционных устройств конкретного ретранслятора;
фиг. 5В - схема, изображающая сигналы, которые могут быть приняты из донорской базовой станции и дистанционных устройств конкретного ретранслятора;
фиг. 5С и фиг. 5D - схемы, изображающие сигналы идентификаторов для множества дистанционных устройств, которые задержаны на различные смещения элементарных посылок, полученные на основании двух различных схем;
фиг. 6А - схема, иллюстрирующая геометрическое ограничение для разности времени измерения прибытия (РВП);
фиг. 6В по фиг. 6Е - схемы, иллюстрирующие четыре разных сценариев для терминала, основанных на использовании ПШ соседнего списка для ПШ идентификатора;
фиг. 7 - блок-схема терминала, который может реализовать различные аспекты варианты осуществления раскрытых способа и устройства; и
фиг. 8 - блок-схема варианта осуществления элемента определения местоположения (ЭОМ) для использования с раскрытыми способом и устройством.
Аспекты раскрытых способа и устройства предоставляют способы для того, чтобы определять местоположение терминала в зоне обслуживания ретранслятора в системе радиосвязи. В одном аспекте способы предоставлены для каждого ретранслятора для того, чтобы посылать идентифицирующий код, который может быть использован терминалом (или ЭОМ) для того, чтобы установить идентичность ретранслятора. Эта информация затем может быть использована для того, чтобы оценить местоположение терминала, как описано ниже.
С помощью раскрытых способов и устройства ретрансляторы, используемые для того, чтобы обеспечить зону обслуживания в помещениях, обычно предназначены для того, чтобы покрывать относительно малые географические области (например, здание, этаж здания и т.д.). В варианте осуществления, поскольку зона обслуживания ретранслятора обычно мала, оценка местоположения для терминала в зоне обслуживания ретранслятора может быть сообщена как обозначенное местоположение в этой зоне обслуживания, которое может быть центром зоны обслуживания. Во многих (если не в большинстве) случаях эта сообщенная оценка местоположения для терминала будет находиться в пределах 50 метров от фактического местоположения терминала. Эта точность достаточна для усовершенствованной службы спасения 911 (Е-911), утвержденной приказом Федеральной комиссии по связи (ФКС), которая требует, чтобы местоположение терминала в вызове 911 посылалось в пункт ответов общественной безопасности (PSAP, ПООБ). Для терминала в виде микротелефонной трубки приказ Е-911 требует, чтобы оценка местоположения находилась 67% времени в пределах 50 метров и 95% времени в пределах 150 метров. Эти требования могут быть удовлетворены с помощью способов, описанных в настоящем описании.
Различные схемы могут быть использованы для того, чтобы идентифицировать ретрансляторы для терминалов. В одной схеме каждому ретранслятору в конкретной зоне обслуживания (например, ячейке) назначают уникальный идентифицирующий код, который может использоваться для того, чтобы однозначно идентифицировать ретранслятор. В конкретной зоне обслуживания множество идентифицирующих кодов могут быть назначены множеству ретрансляторов. Это может быть применимо, например, в очень большом здании, где используется множество ретрансляторов для того, чтобы обеспечить зону обслуживания, и они разнесены в пространстве (например, более чем на 100 метров). Альтернативно множеству ретрансляторов может быть назначен общий идентифицирующий код, если эти ретрансляторы расположены в пределах достаточно малой области. Тогда оценка одного местоположения может быть использована для всех этих ретрансляторов.
Для каждого ретранслятора идентифицирующий код, назначенный ретранслятору, и оценка местоположения, обеспеченная для терминалов зоне обслуживания ретранслятора (например, центр зоны обслуживания ретранслятора), могут запоминаться в таблице. Эта таблица может поддерживаться в ЭОМ. В этом случае терминал может принимать идентифицирующий код из ретранслятора и посылать этот код обратно в ЭОМ (например, в закодированном формате), который затем может обеспечить оценку местоположения для терминала на основании величины (например, центра зоны обслуживания), запомненной в таблице. Альтернативно или дополнительно таблица может поддерживаться в терминале или некотором другом элементе (например, базовой станции, КБС и т.д.).
Схема, используемая для того, чтобы передавать идентифицирующие коды ретранслятора в терминалы, может быть сконструирована на основании различных критериев. Во-первых, идентифицирующие коды должны передаваться способом, который совместим с существующим стандартом МДКР (например, IS-95, cdma2000, W-CDMA, IS-801 и т.д.), который может поддерживаться системой. Во-вторых, схема должна быть совместимой с функциональными возможностями терминалов, уже развернутых и используемых в зоне, что затем позволило бы существующим терминалам выполнять определение местоположения на основании идентифицирующих кодов. В-третьих, идентифицирующие коды должны передаваться в терминалы в том же самом частотном диапазоне, на который настроены терминалы, с тем, чтобы как ретранслированный сигнал, так и соответствующий идентифицирующий код могли бы правильно приниматься с использованием одного устройства приемника. И, в-четвертых, сигналы, используемые для того, чтобы передавать идентифицирующие коды, должны минимально влиять на функционирование системы.
В другом аспекте идентифицирующие коды для каждого ретранслятора передают с использованием сигнала широкого спектра, который может предоставить многочисленные преимущества. Во-первых, сигнал идентификатора широкого спектра может быть составлен таким образом, чтобы иметь минимальное влияние на функционирование системы МДКР. Во-вторых, сигнал идентификатора широкого спектра похож на модулированный сигнал прямой линии связи из базовой станции в ретранслятор и может быть восстановлен аналогичным способом, как и этот сигнал. Таким образом, не требуется никакого дополнительного аппаратного обеспечения для терминала для того, чтобы восстанавливать сигнал идентификатора. Существующие терминалы, уже развернутые в зоне и, которые могут принимать и обрабатывать сигналы МДКР, могут также принимать и обрабатывать сигналы идентификаторов из ретрансляторов.
В одном варианте осуществления сигналы идентификаторов широкого спектра для ретрансляторов генерируют в соответствии со стандартом МДКР IS-95, и они соответствуют этому стандарту. Однако сигналы идентификаторов также могут быть сгенерированы таким образом, чтобы соответствовать некоторому другому стандарту или конструкции МДКР.
В одном варианте осуществления идентифицирующие коды для ретрансляторов содержат псевдошумовые (ПШ) последовательности с определенными смещениями. В типичной системе МДКР каждая базовая станция расширяет свои данные с помощью ПШ последовательности для того, чтобы генерировать сигнал широкого спектра, который затем передают в терминалы (и, возможно, в ретранслятор). ПШ последовательность также используется для того, чтобы расширять данные пилот-сигнала (обычно последовательность из всех нулей) для того, чтобы генерировать указатель пилот-сигнала, который используется терминалами для того, чтобы выполнять когерентную демодуляцию, оценку канала и, возможно, другие функции.
Фиг. 2 - схема, изображающая индексы ПШ последовательности, используемой для того, чтобы генерировать указатели пилот-сигнала и, чтобы расширять данные в базовой станции. Для IS-95 и некоторых других систем МДКР ПШ последовательность имеет специфический шаблон данных и фиксированную длину элементарных посылок 32768. Эта ПШ последовательность постоянно повторяется для того, чтобы генерировать непрерывную расширяющую последовательность, которая затем используется для того, чтобы расширять данные пилот-сигнала и трафика. Начало ПШ последовательности определено стандартом МДКР и синхронизировано с указателем абсолютного времени (TABS), который также упоминается как системное время. Каждой элементарной посылке ПШ последовательности назначают соответствующий индекс ПШ элементарной посылки, причем началу ПШ последовательности назначают индекс ПШ элементарной посылки, равный 0, а последней посылке ПШ последовательности назначают индекс ПШ элементарной посылки, равный 32767.
ПШ последовательность может быть разделена на 512 различных "смещений ПШ INC", пронумерованных от 0 до 511, причем последовательно пронумерованные смещения ПШ INC разделены 64-мя элементарными посылками. На самом деле 512 различных ПШ последовательностей могут быть определены на основании 512 различных смещений ПШ INC, причем каждая из 512 ПШ последовательностей имеет другую начальную точку в указателе абсолютного времени на основании смещения ПШ INC. Таким образом, ПШ последовательность со смещением ПШ INC, равным 0, начинается в индексе ПШ элементарной посылки, равном 0 в TABS, ПШ последовательность со смещением ПШ INC, равным 1, начинается в индексе ПШ элементарной посылки, равном 64 в TABS, ПШ последовательность со смещением ПШ INC, равным 2, начинается в индексе ПШ элементарной посылки, равном 128 в TABS, и т.д. и ПШ последовательность со смещением ПШ INC, равным 511, начинается в индексе ПШ элементарной посылки, равном 32704 в TABS.
Затем 512 возможных ПШ последовательностей могут быть назначены базовым станциям в системе МДКР и использованы, помимо других функций, для того, чтобы дифференцировать базовые станции. Каждой базовой станции назначается конкретное смещение ПШ INC, такое, что указатели пилот-сигнала из соседних базовых станций могут быть дифференцированы, что затем даст возможность терминалам идентифицировать каждую принятую базовую станцию с помощью смещения ПШ INC.
Ближайшие смещения ПШ INC, которые могут назначаться соседним базовым станциям, определены стандартами МДКР. Например, стандарты IS-95 и IS-856 определяют минимальное значение, равное единице, для параметра "ПШ_INC". Этот определенный ПШ_INC, равный единице, обозначает, что соседним базовым станциям могут назначаться ПШ последовательности, разделенные минимальным смещением ПШ INC, равным единице (или 64-ем элементарным посылкам ПШ). Меньшее определенное значение ПШ_INC (например, единица) имеет результатом большее имеющееся смещение ПШ (например, 512), чем может быть назначено базовым станциям. Наоборот, большее определенное значение ПШ_INC (например, четыре) имеет результатом меньшее имеющееся смещение ПШ (например, 128), чем может быть назначено базовым станциям.
В одном аспекте для идентификации ретранслятора используют ПШ последовательности при специфических смещениях. Как используемый в настоящем описании, "ПШ идентификатор" (ПШИ) является ПШ последовательностью, кодом шаблоном бит или некоторым другим средством, используемым для идентификации ретранслятора. В качестве ПШ идентификатором могут использоваться различные ПШ. ПШ идентификаторы могут быть классифицированы следующим образом:
- выделенные ПШИ - одна или более ПШ последовательностей при специфических смещениях ПШ INC резервируют для использования для идентификации ретранслятора;
- ПШИ соседнего списка - ПШ последовательности для базовых станций в соседнем списке используют для идентификации ретранслятора.
Каждый из этих классов соответствует другой схеме, используемой для того, чтобы выбирать ПШ последовательности для использования в качестве ПШ идентификаторов. Схемы выбора ПШМ более подробно описаны ниже. Другие схемы для выбора ПШ последовательностей для использования в качестве ПШИ также могут предполагаться, и это находится в рамках объема изобретения.
Для схемы выделенных ПШИ одно или более смещений ПШ INC из 512 возможных смещений ПШ INC (если определено смещение ПШ INC, равное единице) или из 128 возможных смещений ПШ INC (если определено смещение ПШ INC, равное четырем) выделяется для идентификации ретранслятора. ПШ последовательность в каждом таком выделенном смещении ПШ INC может быть использована для того, чтобы идентифицировать ретрансляторы.
Использование ПШ идентификатора дает возможность терминалу однозначно идентифицировать ретранслятор в ячейке. Если в конкретной ячейке используется множество ретрансляторов, тогда этим ретрансляторам может быть назначен одинаковый или разные ПШ идентификаторы, в зависимости от различных факторов. В одном варианте осуществления ретрансляторам в одной и той же ячейке назначают разные ПШ идентификаторы при различных смещениях ПШ INC. В другом варианте осуществления ретрансляторам в одной и той же ячейке назначают разные смещения элементарных посылок одного и того же ПШ идентификатора. Эти смещения определяют относительно системного времени, как определено смещением повторенной ПШ. Например, если используется смещение 2 элементарных посылки, тогда из одного ПШ идентификатора в пределах окна из 20-ти элементарных посылок могут быть сгенерированы 11 различных ПШ последовательностей. ПШ последовательности, назначенные ретрансляторам в одной и той же ячейке, таким образом, могут иметь разные ПШ INC или смещения элементарных посылок относительно друг друга, чтобы дать возможность специфически идентифицировать эти ретрансляторы.
Фиг. 3 - схема варианта осуществления ретранслятора 114y, который может реализовывать различные аспекты и варианты осуществления раскрытых способа и системы. Ретранслятор фактически является двунаправленным усилителем с большим коэффициентом усиления, используемым для того, чтобы принимать, усиливать и повторно передавать модулированные сигналы как по прямой линии связи, так и по обратной линии связи. По прямой линии связи модулированный сигнал из обслуживающей базовой станции 104 (которая также упоминается как "донорская" ячейка или сектор) принимается ретранслятором 114y либо (например, непосредственно) через антенну, либо через (например, коаксиальный или волоконно-оптический) кабель. Затем ретранслятор 114y фильтрует, усиливает и повторно передает модулированный сигнал прямой линии связи в терминалы 106 в своей зоне обслуживания. Таким образом, по обратной линии связи ретранслятор 114у принимает модулированные сигналы из терминалов в его зоне обслуживания и обрабатывает и повторно передает модулированные сигналы обратной линии связи обратно в обслуживающую базовую станцию.
В специфическом варианте осуществления, изображенном на фиг. 3, ретранслятор 114у включает в себя блок 310 ретранслятора, соединенный с генератором 320 сигнала идентификатора. Блок 310 ретранслятора выполняет обработку сигнала для того, чтобы сгенерировать ретранслированные сигналы как для прямой линии связи, так и для обратной линии связи. Генератор 320 сигнала идентификатора генерирует один или более сигналов идентификаторов широкого спектра, которые включают в себя идентифицирующий код (например, ПШ идентификатор), назначенный ретранслятору 114у.
В изображенном варианте осуществления генератор 320 сигнала идентификатора включает в себя модуль 322 приемника, соединенный с модулем 324 генератора ПШ и устройства преобразования с повышением частоты. Ответвитель 308 подает часть модулированного сигнала прямой линии связи из обслуживающей базовой станции в модуль 322 приемника. Модуль 322 приемника обрабатывает ответвленную часть модулированного сигнала прямой линии связи и обеспечивает указатель синхронизации и указатель частоты, которые используются для того, чтобы генерировать сигнал идентификатора широкого спектра для ретранслятора 114у. Модуль 324 генератора ПШ и устройства преобразования с повышением частоты генерирует ПШ идентификатор для ретранслятора на основе указателя синхронизации и дополнительно преобразует с повышением частоты ПШ идентификатор на соответствующую промежуточную частоту (ПЧ) радиочастоты (РЧ) на основании указателя частоты для того, чтобы сгенерировать сигнал идентификатора широкого спектра. Работа генератора 320 сигнала идентификатора описана более подробно ниже.
В изображенном варианте осуществления блок 310 ретранслятора включает в себя пару дуплексоров 312а и 312b, соответственно, соединенные с антеннами 302а и 302b, которые используются для связи с обслуживающей базовой станцией и терминалами, соответственно. Дуплексор 312а направляет модулированный сигнал прямой линии связи из обслуживающей базовой станции в блок 314 обработки и дополнительно ответвляет обработанные модулированные сигналы из блока 318 обработки в антенну 302а для передачи обратно в обслуживающую базовую станцию. Блок 314 обработки обрабатывает модулированный сигнал прямой линии связи и подает обработанный модулированный сигнал прямой линии связи в объединитель 316. Обработка сигнала может включать в себя усиление, преобразование с понижением частоты модулированного сигнала прямой линии связи в промежуточную частоту (ПЧ) или в основную полосу частот, фильтрацию и преобразование сигнала с повышением частоты в ПЧ или радиочастоту (РЧ). Объединитель 316 (который может быть реализован с помощью гибридного ответвителя) дополнительно принимает сигнал идентификатора широкого спектра из генератора 320 сигнала идентификатора, объединяет сигнал идентификатора с обработанным модулированным сигналом прямой линии связи и подает объединенный сигнал в дуплексор 312b. Объединенный сигнал затем направляется в антенну 302b и передается в терминалы.
Как изображено на фиг. 3, блок 310 ретранслятора может принимать указатель частоты из генератора 320 сигнала идентификатора. Этот указатель частоты может требоваться, если сигнал идентификатора добавляется к ПЧ или основной полосе частот (ОПЧ). Указатель частоты может использоваться для того, чтобы гарантировать, что ПЧ/ОПЧ ретранслятора является точной. В этом случае блок 314 обработки принимает указатель частоты, и объединитель 316 содержится в блоке 314 обработки.
По обратной линии связи модулированные сигналы обратной линии связи из терминалов принимаются антенной 302b, направляются через дуплексор 312b и обрабатываются с помощью блока 318 обработки. Обработанные модулированные сигналы обратной линии связи затем направляются через дуплексор 312а и передаются в обслуживающую базовую станцию через антенну 302а. Обычно на обработку модулированных сигналов прямой линии связи и обратной линии связи в блоке 310 ретранслятора не влияет обработка и добавление сигнала идентификатора широкого спектра.
В варианте осуществления, изображенном на фиг. 3, сигнал идентификатора добавляется к обработанному модулированному сигналу прямой линии связи (например, либо на ПЧ, либо на РЧ) в блоке 310 ретранслятора. Обычно сигнал идентификатора может добавляться в любой точке вдоль маршрута сигнала из антенны 302а в антенну 302b. Например, сигнал идентификатора может быть сгенерирован и добавлен к принятому модулированному сигналу прямой линии связи, и затем объединенный сигнал может быть подан в блок 310 ретранслятора. Альтернативно сигнал идентификатора может быть добавлен к обработанному модулированному сигналу прямой линии связи из блока 310 ретранслятора, и затем объединенный сигнал может быть передан из антенны 302b. Таким образом, сигнал идентификатора может быть добавлен к модулированному сигналу прямой линии связи либо вне, либо внутри блока 310 ретранслятора. Для ретранслятора, уже развернутого в зоне и, который не включает в себя соответствующие схемы (например, объединитель 316 на фиг. 3) для того, чтобы объединять сигнал идентификатора с модулированным сигналом прямой линии связи, эта функция может быть выполнена вне ретранслятора. Также ответвитель 308 может быть расположен либо перед блоком 310 ретранслятора (на его входе) или после (на его выходе) блока 310 ретранслятора. Альтернативно ответвленная часть модулированного сигнала прямой линии связи может быть получена из блока 310 ретранслятора на РЧ, ПЧ или основной полосе частот, в зависимости от конкретной реализации ретранслятора.
Фиг. 4А изображает вариант осуществления модуля 400А, который может использоваться для того, чтобы генерировать и объединять сигнал идентификатора с модулированным сигналом прямой линии связи, чтобы обеспечить объединенный сигнал. Модуль 400а может быть реализован как отдельный блок, который соединяется либо с входным портом, либо с выходным портом блока ретранслятора. Если он соединен с входным портом, объединенный сигнал из модуля 400а может быть обработан и повторно передан с помощью блока ретранслятора аналогичным способом, как для модулированного сигнала прямой линии связи. А если он соединен с выходным портом, сигнал идентификатора может быть объединен с обработанным модулированным сигналом прямой линии связи из блока ретранслятора, чтобы сгенерировать объединенный сигнал для передачи в терминалы. В любом случае блоком ретранслятора можно управлять обычным способом, как, если бы сигнал идентификатора не присутствовал.
В варианте осуществления, изображенном на фиг. 4А, в модуле 400А модулированный сигнал прямой линии связи (т.е. РЧ входной сигнал прямой линии связи) ответвляется через ответвитель 408, направляется через развязку 412 и подается в объединитель 416, который может быть реализован с помощью гибридного ответвителя. Объединитель 416 также принимает сигнал идентификатора из генератора 420а сигнала идентификатора, объединяет модулированный сигнал прямой линии связи с сигналом идентификатора и подает объединенный сигнал на выход (т.е. РЧ выход прямой линии связи).
Фиг. 4а также изображает вариант осуществления генератора 420а сигнала идентификатора, который также может быть использован для генератора 320 сигнала идентификатора на фиг. 3. Ответвленная часть модулированного сигнала прямой линии связи подается в модуль 422 приемника и обрабатывается, чтобы обеспечить указатели синхронизации и частоты, как упомянуто выше. В варианте осуществления модуль 422 приемника включает в себя блок обработки приемника, аналогичный блоку обработки, включенному в терминал, и который может демодулировать модулированный сигнал прямой линии связи из обслуживающей базовой станции. В частности, модуль 422 приемника фильтрует, усиливает, преобразует с понижением частоты и преобразует в цифровую форму модулированный сигнал прямой линии связи, чтобы обеспечить выборки. Затем выборки сужаются с помощью локально сгенерированной ПШ последовательности при различных смещениях элементарных посылок, чтобы восстановить указатель пилот-сигнала, переданный обслуживающей базовой станцией. Поиск и демодуляция пилот-сигнала широко известны, как продемонстрировано в патенте США № 5764687, озаглавленном "Mobile Demodulator Architecture For A Spread Spectrum Multiple Access Communication System", в патентах США № 5805648 и 5644591, озаглавленных вместе "Method And Apparatus For Performing Search Acquisition In A CDMA Communication System"; и в патенте США № 5577022, озаглавленном "Pilot Signal Searching Technique For Cellular Communication System".
В предлагаемом варианте осуществления модуль 422 приемника включает в себя контур отслеживания синхронизации и контур отслеживания несущей (не изображены на фиг. 4А для простоты). Контур отслеживания частоты блокирует частоту локального опорного генератора (например, температурно-компенсированного кристаллического генератора ТСХО) на частоту указателя пилот-сигнала в принятом модулированном сигнале прямой линии связи (т.е. повторяемом сигнале). Затем указатель синхронизации может быть получен с помощью выявления начала ПШ последовательности, выделенного из восстановленного указателя пилот-сигнала. Указатель синхронизации может быть обеспечен с помощью модуля 422 приемника через сигнал синхронизации, имеющий импульс, совпадающий с детерминированным периодическим смещением от системного времени (как полученного из восстановленного указателя пилот-сигнала), что дает возможность настройки ПШ идентификатора на системное время.
Контур отслеживания несущей блокирует локальный генератор (ЛГ) на несущую частоту модулированного сигнала прямой линии связи. Указатель частоты затем может быть получен из блокированного локального генератора. Указатель частоты может быть обеспечен через тактовый сигнал, имеющий частоту, которая связана (например, 1/N раз) с частотой восстановленной несущей.
В варианте осуществления, изображенном на фиг. 4А, модуль 424 генератора ПШ и преобразователя с повышением частоты включает в себя контроллер 430, генератор 432 ПШ и преобразователь 434 с повышением частоты. Генератор 432 ПШ принимает указатель синхронизации из модуля 422 приемника и может быть дополнительно обеспечен другими сигналами, которые могут требоваться для генерирования ПШ идентификатора. Например, генератор 432 ПШ может быть обеспечен тактовым сигналом с умноженной во много раз скоростью элементарной посылки ПШ (например, тактовый сигнал с 16-ти кратной скоростью элементарной посылки или элементарная посылка х 16) и другим сигналом с числом циклов элементарная посылка х 16 в определенный период времени (например, 2 секунды). Генератор 432 ПШ затем генерирует один или более ПШ идентификаторов с необходимым смещением, в зависимости от конкретной реализации, и дополнительно может выполнять формирование импульса каждого ПШ идентификатора с использованием цифрового фильтра для того, чтобы генерировать правильную периодическую ПШ последовательность.
Преобразователь 434 с повышением частоты принимает указатель частоты из модуля 42 приемника и (периодический) ПШ идентификатор из генератора 432 ПШ и генерирует один или более сигналов идентификатора широкого спектра, причем каждый сигнал идентификатора соответствует разной несущей частоте и/или смещению ПШ. Для определенных приложений может требоваться множество сигналов идентификаторов, как описано ниже. Используя ссылку частоты из модуля 422 приемника, каждый сигнал идентификатора может быть обеспечен с несущей частотой, которая имеет незначительную погрешность частоты (например, несколько герц или меньше) относительно повторно передаваемого модулированного сигнала прямой линии связи. Незначительная погрешность частоты позволяет терминалам принимать сигнал идентификатора и восстанавливать ПШ идентификатора, даже когда они блокированы для модулированного сигнала прямой линии связи. Генерирование сигнала идентификатора может быть выполнено в цифровом виде с использованием сочетания аналоговых и/или цифровых схем, или посредством некоторого другого способа.
Контроллер 430 может взаимодействовать с модулем 422 приемника, генератором 432 ПШ и устройством 434 преобразования частоты для различных функций. Например, контроллер 430 может управлять модулем 422 приемника для того, чтобы блокировать один определенный из ряда модулированных сигналов прямой линии связи, чтобы осуществлять поиск модулированного сигнала прямой линии связи в определенном частотном окне, и т.д. Контроллер 430 может управлять генератором 432 ПШ для того, чтобы генерировать ПШ идентификатор с определенным смещением, которое назначено ретранслятору. Контроллер 430 дополнительно может управлять устройством 434 преобразования с повышением частоты для того, чтобы генерировать сигнал идентификатора на определенной несущей частоте и на определенном уровне мощности передачи.
В варианте осуществления уровнем мощности каждого сигнала идентификатора управляют таким образом, чтобы он не влиял на емкость системы. Для системы МДКР каждый передаваемый сигнал (например, сигнал идентификатора) действует как помеха для других передаваемых сигналов (например, модулированного сигнала прямой линии связи) и могут ухудшить качество этих других передаваемых сигналов, как принимаемых в терминалах. Ухудшение качества сигнала затем может повлиять на емкость передачи прямой линии связи. Для того чтобы минимизировать это ухудшение, уровнем мощности сигнала идентификатора можно управлять таким образом, чтобы он был на ниже определенного уровня (например, 15 децибел) общей мощности сигнала ретранслированного модулированного сигнала прямой линии связи. Уровнем мощности сигнала идентификатора также управляют таким образом, чтобы он был в диапазоне приема большинства терминалов. Тогда это гарантирует, что сигнал идентификатора может быть правильно принят терминалами.
В варианте осуществления только ПШ идентификатор используют для того, чтобы конкретно идентифицировать каждый ретранслятор, независимо от числа модулированных сигналов прямой линии связи, передаваемых ретранслятором. Однако множество сигналов идентификаторов может быть сгенерировано с помощью модуля 400а из-за ряда причин. Например, если модулированный сигнал прямой линии связи должен повторно передаваться для ряда несущих частот, соответствующих несущим частотам ретранслированных сигналов. Множество сигналов идентификаторов также может быть сгенерировано в цифровом виде, например, на низкой ПЧ (например, 10 МГц), а затем преобразовано с повышением частоты на требуемую РЧ или ПЧ. Поскольку ПШ идентификатора используется для идентификации ретранслятора, а не идентификации базовой станции, только один ПШ идентификатор назначают каждому ретранслятору, даже если может ретранслироваться множество модулированных сигналов прямой линии связи и множества базовых станций.
Фиг. 4В изображает вариант осуществления другого модуля 400b, который может быть использован для того, чтобы генерировать и объединять сигнал идентификатора с модулированным сигналом прямой линии связи, чтобы обеспечить объединенный сигнал. Модуль 400b подобен в определенных аспектах модулю 400а на фиг. 4а, но дополнительно включает в себя модуль 426 передатчика, используемый для того, чтобы обеспечить подтверждение для дистанционной конфигурации через модулированные сигналы прямой линии связи. Удаленная конфигурация ретранслятора может быть выполнена, например, с помощью ЭОМ. В этом случае модуль 426 передатчика может использоваться для того, чтобы посылать информацию обратно в ЭОМ относительно конфигурации. Эта информация может содержать подтверждение команды, посланной ЭОМ, чтобы изменить сигнал идентификатора (например, смещение и/или относительную мощность сигнала идентификатора. Эта обратная связь из ретранслятора позволила бы затем ЭОМ постоянно отслеживать и проверять каждую удаленную конфигурацию. Местоположение объединителя 416 и устройства 412 развязки может быть подкачено, что позволило бы модулю 422 приемника самостоятельно выполнять постоянное отслеживание сигнала идентификатора. Таким образом, модуль 422 приемника может принимать сигнал идентификатора, аналогично терминалу, таким образом, давая возможность мониторинга сигнала, который добавлен.
Фиг. 4С изображает вариант осуществления еще одного модуля 400с, который может быть использован для того, чтобы генерировать и объединять сигнал идентификатора с модулированным сигналом прямой линии связи, чтобы обеспечить объединенный сигнал. Модуль 400с подобен в определенных аспектах модулю 400b на фиг. 4B, но дополнительно включает в себя блоки 450а и 450b, используемые для того, чтобы объединять модулированные сигналы прямой и обратной линий связи на входных и выходных портах, соответственно, модуля 400с, таким образом, чтобы один кабель мог быть использован в каждом порте совместно для прямой линии связи и обратной линии связи. В изображенном варианте осуществления каждый блок 450 включает в себя пару полосовых фильтров (BPF, ПФ) 452 и 454, используемых для того, чтобы фильтровать модулированные сигналы прямой и обратной линий связи, соответственно. Циркулятор 456 направляет модулированные сигналы прямой и обратной линий связи в их соответствующие пункты назначения и дополнительно обеспечивает развязку для прямой и обратной линий связи. Каждый блок 450а и 450b также может быть реализован с помощью дуплексора.
Ретранслятор может быть связан с рядом дистанционных устройств (ДУ), используемых для того, чтобы обеспечивать зону обслуживания для своих соответственных зон. Для применения внутри помещений, изображенного на фиг. 1В, ретранслятор 114В включает в себя основное устройство 115 и ряд дистанционных устройств 115, причем каждое дистанционное устройство обеспечивает зону обслуживания для соответствующего этажа здания. Сигналы идентификаторов, передаваемые дистанционными устройствами, могут быть сгенерированы многочисленными способами, и могут основываться на различных соображениях (например, должны ли дистанционные устройства идентифицироваться отдельно или нет).
Фиг. 5А по фиг. 5D иллюстрируют некоторые специфические варианты осуществления для генерирования ПШ идентификатора для множества дистанционных устройств ретранслятора. Для определенных систем МДКР (таких как системы, которые соответствуют стандарту МДКР IS-95) терминал сообщает только о самом раннем поступающем пилот-сигнале (т.е. первом экземпляре сигнала, который может быть использован для демодуляции) относительно опорного времени. В настоящее время стандарт IS-801 также поддерживает сообщение только о самом раннем поступающем пилот-сигнале. Пилот-сигнал, по существу, является ПШ последовательностью, поскольку данные пилот-сигнала являются последовательностью из всех нулей или всех единиц. Для этих систем специфическое смещение для ПШ идентификатора может быть назначено для каждого дистанционного устройства таким образом, что дистанционное устройство может быть индивидуально идентифицировано, как описано ниже. Для других систем, которые могут поддерживать сообщение о множестве пилот-сигналов (т.е. профиль пилот сигнала), сообщенный профиль пилот-сигнала также может быть использован для того, чтобы индивидуально идентифицировать дистанционные устройства. Фиг. 5А по фиг. 5D изображают примеры случаев для иллюстрации. Концепции, описанные в настоящем описании, могут быть распространены и/или модифицированы для других случаев, и это находится в рамках объема раскрытых способа и устройства.
Ретранслированные сигналы, переданные из дистанционных устройств конкретного ретранслятора, обычно задержаны таким образом, что эти ретранслированные сигналы не принимаются терминалом с одинаковой мощностью и задержкой, а с противоположной фазой, в этом случае они были бы отменены. Поскольку зоны, покрытые дистанционными устройствами, обычно являются малыми, задержка на две элементарные посылки между дистанционными устройствам обычно является адекватной.
В следующем описании фиг. 5А по фиг. 5D предполагается, что для идентификации ретранслятора используются ПШИ. Для концепций, описанных со ссылкой на фиг. 5А по 5D, затем в дальнейшем описано расширение, чтобы содержать ПШИ соседнего списка.
Фиг. 5А - диаграмма, изображающая сигналы, которые могут приниматься из дистанционных устройств конкретного ретранслятора. Как изображено на фиг. 5А, ПШ идентификатора задержан от повторенного донорского ПШ (RDPN, ПДПШ) (т.е. ПШ из донорской базовой станции, который повторен) на заранее установленное смещение d, а ретранслированный сигнал и сигнал идентификатора для каждого дистанционного устройства задержаны на две элементарные посылки относительно друг друга. Если терминал принимает только сигналы из ретранслятора (т.е. из одного или более дистанционных устройств ретранслятора), а не из донорской базовой станции, тогда терминал будет сообщать о задержке (или смещении) ПШ идентификатора относительно ретранслированного донорского ПШ в следующем диапазоне:
RRIPN ∈ [d; 2(n-1)+d]. (1)
Уравнение (1) указывает, что смещение самого раннего ПШ идентификатора, сообщаемое терминалом, попадет в диапазон из d (если приняты ретранслированный сигнал и сигнал идентификатора из первого дистанционного устройства) в 2(n-1)+d (если приняты ретранслированный сигнал и сигнал идентификатора из первого терминала из n-го дистанционного устройства). Причиной для диапазона возможных смещений, RRIPN, заключается в том, что терминал сообщает о самом раннем принятом ПШ идентификаторе, и самые ранние принятые ретранслированные сигналы и сигналы идентификаторов могут поступать из одних и тех же или других дистанционных устройств.
Фиг. 5В - диаграмма, изображающая сигналы, которые могут приниматься из донорской базовой станции и дистанционных устройств конкретного ретранслятора. Если терминал может принимать модулированный сигнал прямой линии связи непосредственно из донорской базовой станции, а также ретранслированный сигнал из ретранслятора, тогда терминал будет сообщать о донорском ПШ (DPN, ДПШ), принятом из базовой станции, и о самом раннем ПШ идентификаторе для ретранслятора. Смещение ПШ идентификатора относительно донорского ПШ попадало бы в следующий диапазон:
RIPN ∈ [d+х; 2(n-1)+d+х], (2)
где х - задержка между донорской базовой станцией и первым (самым ранним) дистанционным устройством для повторителя.
Из уравнений (1) и (2) можно заметить, что заранее определенное смещение d для ПШ идентификатора является общим для обоих диапазонов RRIPN и RIPN. Если задержка х между донорской базовой станцией и самым ранним дистанционным устройством удовлетворяет условию х>2n, тогда можно определить, принимает ли терминал модулированный сигнал прямой линии связи из донорской базовой станции или из ретранслятора. Эта информация может быть полезна в определенных случаях, например, когда терминал расположен в зоне обслуживания ретранслятора, но по-прежнему может принимать сигнал из донорской базовой станции, или когда терминал расположен вне зоны обслуживания ретранслятора, но по-прежнему принимает сигналы утечки из ретранслятора.
В определенных вариантах осуществления множество сигналов идентификаторов может быть сгенерировано на основании разных смещений элементарных посылок одного ПШ идентификатора. Это может быть желательно, например, если сигналы идентификаторов необходимы для того, чтобы индивидуально идентифицировать каждое из множества дистанционных устройств ретранслятора. В этом случае сигнал идентификатора может быть сгенерирован для каждого дистанционного устройства, причем каждый сигнал идентификатора включает в себя ПШ идентификатора при конкретном смещении элементарной посылки, назначенном этому дистанционному устройству. Использование разных смещений элементарных посылок для сигналов идентификаторов для различных дистанционных устройств дает возможность более определенной оценки местоположения терминала. Например, разные смещения элементарных посылок могут использоваться для того, чтобы оценить местоположение терминала в зоне обслуживания конкретного дистанционного устройства (например, на конкретном этаже здания), в противоположность зоне обслуживания зоне обслуживания основного устройства (например, конкретного здания).
Фиг. 5С - диаграмма, изображающая сигналы идентификаторов для множества дистанционных устройств, которые задержаны на линейно-возрастающие смещения элементарных посылок. Задержки для сигналов идентификаторов могут быть дополнительными к задержкам для ретранслированных сигналов. Например, если ретранслированные сигналы для дистанционных устройств задержаны на две элементарные посылки, тогда сигналы идентификаторов для дистанционных устройств могут быть задержаны на четыре элементарных посылки. В варианте осуществления задержки элементарных посылок, назначенные дистанционным устройствам, определены следующим образом:
dIPN(i)=d+2(i-1), 1<i<n (3)
где dIPN(i) - смещение, назначенное i-му дистанционному устройству, а d - смещение ПШ идентификатора относительно ретранслированного донорского ПШ для первого дистанционного устройства (т.е. d=dIPN(1)). В качестве конкретного примера, изображенного на фиг. 5С, если ретранслированные сигналы для дистанционных устройств задержаны на две элементарные посылки, d=8, а n=3, тогда смещение dIPN(i) для трех дистанционных устройств может быть вычислено как {8,10,12}.
При использовании разных смещений для дистанционных устройств, если ретранслированный сигнал и сигнал идентификатора только из одного дистанционного устройства принимаются терминалом в любой данный момент времени, тогда это дистанционное устройство может быть индивидуально идентифицировано с помощью смещения между ретранслированным сигналом и сигналом идентификатора.
Множество сигналов идентификаторов с разными смещениями элементарных посылок могут быть сгенерированы (например, с помощью основного устройства) с помощью задержки сигнала идентификатора (например, на ПЧ или РЧ) фильтрами разных задержек с помощью генерирования ПШ последовательностей с различными смещениями элементарных посылок и преобразования с повышением частоты этих ПШ последовательностей, или с помощью других механизмов.
Фиг. 5D - диаграмма, изображающая сигналы идентификаторов для множества дистанционных устройств, которые задержаны на нелинейно-возрастающие смещения элементарных посылок. В варианте осуществления задержки элементарных посылок, назначенные дистанционным устройствам, определены следующим образом:
dIPN(i)=d-(i-1)·(i+2), 1<i<n (4)
где dIPN(i) - смещение, назначенное i-му дистанционному устройству, а d - смещение ПШ идентификатора относительно ретранслированного донорского ПШ для первого дистанционного устройства (т.е. d=dIPN(1)). В качестве конкретного примера, изображенного на фиг. 5D, если ретранслированные сигналы для дистанционных устройств задержаны на две элементарные посылки, d=14, а n=5, тогда смещение dIPN(i) для пяти дистанционных устройств может быть вычислено как {14,10,4,-4,-14}.
Разные смещения, генерируемые с помощью уравнения (4) дают возможность идентификации конкретного дистанционного устройства, из которого обнаружен сигнал идентификатора (если принимается только одно дистанционное устройство), или двух или более дистанционных устройств, из которых обнаружены сигналы идентификаторов (если принимаются два или более дистанционных устройств). Таблица 1 перечисляет возможные результаты измерения смещений с помощью терминала (в столбце 1), дистанционные устройства, которые могут быть обнаружены для измеренных смещений (в столбце 2) и сообщенные дистанционные устройства (в столбце 3).
Дистанционные устройства, сообщенные в таблице 1 (в столбце 3) могут быть получены следующим образом. Для четного значения d (например, d=14 для примера, изображенного на фиг. 5D) измеренное смещение ПШ идентификатора относительно ретранслированного донорского ПШ сначала округляется до ближайшего значения и обозначается как  IPN. Дистанционное устройство (устройства), из которых принимается сигнал (сигналы) идентификатора, тогда может быть идентифицировано как:
IPN. Дистанционное устройство (устройства), из которых принимается сигнал (сигналы) идентификатора, тогда может быть идентифицировано как:

Для нечетного значения d измеренное смещение ПШ идентификатора округляется до ближайшего нечетного числа, и дистанционное устройство (устройства) затем идентифицируется как аналогичным способом на основании уравнения (5).
Если множество ретрансляторов используется для данной зоны обслуживания донорского ПШ (например, сектор или однонаправленная ячейка), причем каждый ретранслятор, возможно, имеет множество дистанционных устройств, тогда диапазон смещений, сообщенных терминалом для каждого ретранслятора, может быть выражен как:
Rk ∈ Rk,RIPN ∪ Rk,IPN, (6)
где Rk - диапазон смещений, который может быть сообщен для k-го ретранслятора;
Rk,RIPN - диапазон смещений, если k-ый ретранслятор принят, а донорская базовая станция не принята;
Rk,IPN - диапазон смещений, если приняты как k-ый ретранслятор, так и донорская базовая станция;
"∪" - операция объединения.
Если xk=2(nk+1), тогда диапазон Rk может быть выражен как:
Rk ∈ [dk ; dk + 4·nk], (7)
где Rk - заранее определенное смещение между ПШ идентификатором и ретранслированным ПШ для k-го ретранслятора, а nk - число дистанционных устройств для k-го ретранслятора. Уравнение (7) получено из уравнений (1), (2) и (6). Начало диапазона Rk является нижним значением в уравнении (1) (т.е. d), а конец диапазона задан верхним значением в уравнении (2) (т.е. 2(n-1)+d+x). С помощью подстановки x=2(n+1) и сохранения условия x>2n, конец диапазона затем вычисляется как 4n+d, как изображено в уравнении (7).
Задержки dk выбираются таким образом, чтобы удовлетворялось следующее уравнение:
dk+1 = dk + 4·nk +2, (8)
Если уравнение (8) удовлетворяется, тогда ретранслятор, из которого принят ретранслированный сигнал в терминале, может быть конкретно идентифицирован. Задержка d1 может быть выбрана таким образом, что сигналы идентификаторов находятся в поисковом окне, используемом для поиска пилот-сигналов.
Вообще, если диапазон смещений используется для сигналов идентификаторов, тогда терминал обеспечивается информацией о диапазоне таким образом, что может быть соответствующим образом установлено поисковое окно.
Если множество ретрансляторов используется для зоны обслуживания, тогда множество ПШ также может использоваться для того, чтобы индивидуально идентифицировать каждый ретранслятор. Каждому ретранслятору может быть назначен соответствующий ПШ идентификатор. Ретранслятору также может быть назначены два или более ПШ идентификаторов. Например, если имеются два ПШ идентификатора, тогда первый ПШ идентификатор может быть назначен первому ретранслятору, второй ПШ идентификатор может быть назначен второму ретранслятору, и комбинация первого ПШ идентификатора и второго ПШ идентификатора может быть назначена третьему ретранслятору. Также могут генерироваться и использоваться многочисленные комбинации смещений этих ПШ идентификаторов.
В типичной системе МДКР каждая базовая станция может быть связана с соответствующим соседним списком, который включает расположенные рядом базовые станции, которые являются кандидатами для передачи обслуживания. Терминал может быть обеспечен соседним списком, связанным с базовыми станциями, с которыми он взаимодействует. Терминал может обращаться в этот соседний список, когда он постоянно ищет сильные экземпляры сигнала (или многомаршрутных составляющих) для того, чтобы определить, требуется ли передача обслуживания или нет.
Для схемы ПШИ соседнего списка ПШ последовательности, используемые базовыми станциями в соседнем списке (т.е. ПШ соседнего списка), также используются для идентификации ретранслятора. Различные соображения могут быть приняты во внимание при выборе ПШ соседнего списка, используемых для ПШИ, передачи ПШИ и использования результатов измерения ПШИ. Эти соображения гарантируют, что результаты измерений ПШИ являются отличимыми от результатов измерений ПШ соседнего списка, которые используются для ПШИ. Если эти соображения правильно адресованы, тогда использование ПШИ соседнего списка аналогично использованию выделенных ПШИ, которое описано выше.
Определенный критерий выбора может быть использован для того, чтобы определить, какие ПШ соседнего списка могут быть использованы для ПШИ. При одном критерии ПШ соседнего списка, которые ретранслируются, не используются для ПШИ. Если такое ограничение не наложено, тогда терминал может принимать тот же самый ПШ, как (1) ретранслированный донорский ПШ из одного ретранслятора, так и (2) ПШИ из другого ретранслятора. Поскольку терминал сообщает один результат измерения для каждого ПШ, соответствующего самому раннему маршруту поступления, может быть неоднозначность относительно того, был ли сообщенный ПШ от одного или другого ретранслятора. При другом критерии для данной донорской базовой станции, связанной с одним или более ретрансляторов, только ПШ в соседнем списке для этой базовой станции, которые являются необнаруживаемыми в любом из связанных ретрансляторов, могут быть использованы как ПШИ для этих ретрансляторов. Это ограничение может быть гарантировано, например, с помощью получения результата поиска ПШ из устройства, расположенного в каждом ретрансляторе, и использовано для того, чтобы дистанционно конфигурировать и генерировать ПШИ.
ПШИ должны передаваться на определенном уровне мощности, таком что эти ПШИ могли быть надежно обнаружены в терминале, в то же время, минимизируя влияние на связь и функционирование системы. В качестве одного соображения ПШИ должны передаваться на достаточно низком уровне мощности с тем, чтобы он не добавлялся к соседнему списку терминала. В качестве конкретного примера, ПШИ может передаваться на 15 децибел ниже мощности ретранслированного донорского ПШ. Для слабо нагруженной ячейки с ретранслированным EcI0 пилот сигнала -5 децибел ПШИ может передаваться с мощностью, соответствующей EcI0 -20 децибел.
Для сети IS-95А, которая имеет низкую пороговую величину (T_ADD) для добавления новой базовой станции в кандидатный список, ПШИ могут передаваться на низком уровне мощности. Дополнительный запас тогда может уменьшить вероятность того, что измерение ПШИ будет подавлено шумом (так как мощность пилот-сигнала может быть оценена при коротком периоде интегрирования), и превышения пороговой величины T_ADD. Для сети IS-95, которая имеет "динамическую" пороговую величину добавления, большая разность мощности пилот-сигналов ретранслированного донорского ПШ и ПШИ должна имеет результатом низкую вероятность того, что ПШИ будет добавлен в кандидатный список.
В определенные моменты терминал может быть в области передачи обслуживания между (1) ретранслятором, передающим донорский ПШ и ПШИ, и (2) соседней базовой станцией, ПШ которой используется в качестве ПШМ ретранслятором. ПШ из соседней базовой станции упоминается как "соседний ПШ" (NPN, СПШ). В эти моменты терминал может пытаться (некогерентно) объединить передачу из донорской базовой станции с передачей из соседней базовой станции, чтобы улучшить эффективность демодуляции. В этом случае терминал может рассматривать ПШИ как другую многомаршрутную составляющую соседней базовой станции и пытался бы объединить не существующий канал трафика, связанный с ПШИ (так как только ПШИ передается из ретранслятора) с каналом трафика соседней базовой станции.
Эффект объединения не существующего канала трафика, связанного с ПШИ, с каналом трафика соседней базовой станции может быть незначительным из-за следующих причин. Во-первых, вероятность того, что терминал находится в состоянии передачи обслуживания между ретранслятором и этой соседней базовой станцией, может быть мала, если придерживаются критериям выбора ПШИ, описанным выше. Во-вторых, вероятность того, что ПШИ выбирается для объединения, также может быть мала. Для того чтобы быть выбранным для объединения мощность пилот-сигнала ПШИ должна превысить порог занятости канала. Однако мощность пилот-сигнала ПШИ является относительно слабой (например, на 15 децибел ниже мощности пилот-сигнала ретранслированного донорского ПШ). Следовательно, ПШИ перешел бы порог занятости канала только, если ретранслированный донорский ПШ был бы принят терминалом на высоком уровне. В-третьих, вклад из ПШМ может быть малым, даже если он объединен. Поскольку только пилот-сигнал, а не сигналы трафика передаются ретранслятором для ПШИ, только шум, обнаруженный для не существующего канала трафика, был бы объединен. Однако этот шум был бы ославлен на большую величину. Для максимального коэффициента объединения (который обычно используется для избирательных приемников), сигнал трафика из каждого выступа взвешивается с помощью мощности пилот-сигнала, принятого с помощью этого выступа, перед объединением. Поскольку мощность пилот-сигнала ПШИ является относительно слабой (например, 15 децибел или значительно ниже максимальной мощности для выступов), шум из ПШИ был бы взвешен с помощью малой величины. В-четвертых, ПШИ будет объединен только, если имеются запасные выступы, чтобы отслеживать относительно слабую многомаршрутную составляющую для ПШИ.
Если ПШИ для ретрансляторов выбираются из ПШ соседнего списка, тогда может быть необходимым определить, приняты ли сигналы (или ПШ) непосредственно из базовых станций или через ретрансляторы. В варианте осуществления это определение может быть выполнено на основании геометрических ограничений.
Фиг. 6А - диаграмма, иллюстрирующая геометрическое ограничение для измерения разности времени прибытия (РВП). На фиг. 6А терминал принимает пилот-сигналы из двух базовых станций, и два принятых пилот-сигнала используются для того, чтобы получить один результат измерения РВП. Результат измерения РВП указывает разность времен прибытия двух принятых пилот-сигналов, а время прибытия сигнала пропорционально расстоянию, которое проходит сигнал. Расстояния между терминалом и двумя базовыми станциями обозначены как r1 и r2, а расстояние между двумя базовыми станциями обозначено как d12. Из фиг. 6А можно видеть, что расстояния r1, r2 и d12 образуют треугольник. Тогда может быть сформировано следующее ограничение:
-d12< (r1-r2) < d12, (9)
Может быть придуман геометрический тест, основанный на геометрическом ограничении, выраженном в уравнении (9).
Уравнение (9) указывает, что, допуская отсутствие погрешности синхронизации приемника и оценки, абсолютная величина каждого результата измерения РВП (т.е. r1-r2) ограничена сверху расстоянием d12 между двумя базовыми станциями. Следовательно, геометрические ограничения для измерений РВП могут быть использованы (1) для того, чтобы определить избыточную задержку в измерениях РВП и/или (2) для того, чтобы определить, задержаны ли пилот-сигналы ретрансляторами или нет.
ПШИ для каждого ретранслятора может быть задержан относительно ретранслированного донорского сигнала на величину, которая больше, чем расстояние между донорской и соседней базовыми станциями плюс некоторый запас. Это может быть выражено как:
ripn-rrdpn > ddn+dmar, или ripn > rrdpn+ddn+dmar, (10)
где ripn - результат измерения ПШИ из ретранслятора;
rrdpn - результат измерения РВП из ретранслятора;
ddn - расстояние между донорской базовой станцией и соседней базовой станцией, ПШ которой используется в качестве ПШИ; и
dmar - запас.
Геометрические ограничения для РВП могут быть использованы для того, чтобы определить, принят ли сигнал в терминале из ретранслятора или нет. Неретранслированный донорский ПШ (ДПШ), неретранслированный соседний ПШ (СПШ), ретранслированный донорский ПШ (РДПШ) и ПШИ или любая комбинация этих ПШ, все может быть обнаружено терминалом, как описано в следующих сценариях.
Фиг. 6В - диаграмма, иллюстрирующая сценарий, при котором терминал находится в зоне обслуживания ретранслятора. Для этого сценария терминал принимает РДПШ и ПШИ из ретранслятора, но не ДПШ и СПШ. Терминал затем может сообщить РДПШ и ПШИ в ЭОМ, который может выполнить геометрический тест. Измерение РВП между РДПШ и ПШИ должно быть точным, поскольку эти ПШ передаются из одного и того же источника. Если ПШИ задержан, по меньшей мере, на ddn +dmar относительно РДПШ, как изображено выше в уравнении (10), тогда геометрический тест для результатов измерений РДПШ и ПШИ закончился бы неуспешно, поскольку разность между результатом измерения ПШИ и результатом измерения РДПШ была бы больше, чем расстояние между донорской и соседней базовыми станциями, по меньшей мере, на запас (т.е. ripn-rrdpn > ddn+dmar). Нуспешное завершение геометрического теста может быть использовано как указание, что ПШИ был принят из ретранслятора, а не из соседней базовой станции, ПШ которой используется как ПШИ.
Фиг. 6С - диаграмма, иллюстрирующая сценарий, при котором терминал находится в совместной зоне обслуживания ретранслятора, донорской базовой станции и соседней базовой станции. Для этого сценария терминал принимает РДПШ и ПШИ из ретранслятора, ДПШ непосредственно из донорской базовой станции и СПШ непосредственно из соседней базовой станции. Терминал затем сообщил бы о самой ранней поступающей многомаршрутной составляющей для каждого различного ПШ, которая мола бы быть ДПШ и СПШ, принятые через неретранслированные маршруты. ДПШ и СПШ затем могут быть использованы ЭОМ обычным способом.
Фиг. 6D - диаграмма, иллюстрирующая сценарий, при котором терминал находится в совместной зоне обслуживания ретранслятора и донорской базовой станции. Для этого сценария терминал принимает РДПШ и ПШИ из ретранслятора, а ДПШ непосредственно из донорской базовой станции. Терминал затем сообщил бы ДПШ и ПШИ, которые являются самыми ранними поступающими многомаршрутными составляющими для этих ПШ. Если ДПШ задержан на rrep ретранслятором, чтобы сгенерировать РДПШ, тогда результат измерения РВП для ДПШ и ПШИ был бы ripn-rrdpn > ddn+dar+rrep. Геометрический тест тогда завершился бы неуспешно, и это неуспешное завершение может быть использовано как указание, что ПШИ был принят через ретранслятор.
Фиг. 6Е - диаграмма, иллюстрирующая сценарий, при котором терминал находится в совместной зоне обслуживания ретранслятора и соседней базовой станции. Для этого сценария терминал принимает РДПШ из ретранслятора, а СПШ непосредственно из соседней базовой станции. Терминал может принимать или не принимать ПШИ из ретранслятора. Терминал затем сообщил бы о СПШ, который является самой ранней поступающей многомаршрутной составляющей для этого ПШ, и РДПШ. Результат измерения для РДПШ и СПШ был бы rrdpn-rdpn или rdpn+drep-rnpn.
Если задержка drep ретранслятора достаточно велика, тогда геометрический тест завершился бы неуспешно, и это неуспешное завершение затем могло быть использовано, чтобы отвергнуть результаты изменений, полученные из ретранслятора. Однако, если задержка СПШ достаточно велика или, если задержка ретранслятора не достаточно велика, тогда результат измерения РВП не нарушит геометрический тест. В этом случае другие способы могут быть использованы для того, чтобы отличить (1) прием ПШИ через ретранслятор от (2) приема СПШ непосредственно из соседней базовой станции с избыточной задержкой в СПШ. Например, СПШ больше единицы может использоваться для того, чтобы сделать это определение. Вероятность появления такого события может сохраняться малой с помощью выбора подходящих ПШ соседнего списка, чтобы использовать в качестве ПШИ.
Сценарий, описанный на фиг. 6Е, обычно не происходит для ретрансляторов внутри помещений, но может происходить для ретрансляторов вне помещений. Этот сценарий может происходить независимо от того, используются ли выделенные ПШ или ПШ соседнего списка для ПШИ.
В приведенном выше описании предполагается, что ПШИ задержаны в положительном направлении относительно РДПШ. Это не является требованием. ПШИ также могут быть задержаны в отрицательном направлении на величину (dipn), которая больше, чем расстояние (ddn) между донорской и соседней базовыми станциями плюс задержка ретранслятора (drep), плюс некоторый запас (rmar). Это может быть выражено как:
dipn> ddn+drep+dmar, (11)
Следует заметить, что в одном варианте осуществления раскрытых способа и устройства, когда определено, что сигнал прошел через ретранслятор, этот сигнал не используется в определении местоположения. Это предоставляет простой и дешевый способ, чтобы гарантировать, что задержка, которая добавлена к времени прохождения сигналов из базовой станции в терминал, не вызовет ошибку в определении местоположения. То есть, поскольку задержка распространения между моментом времени, когда сигнал передается из базовой станции, и моментом времени, когда сигнал принимается терминалом, будет точно отражать расстояние между базовой станцией и терминалом, эта задержка не должна использоваться в определении местоположения. Если имеется дополнительная информация относительно идентификации ретранслятора, через который прошел сигнал, и местоположения этого ретранслятора, тогда эта информация может быть использована в определении местоположения терминала. Однако следует заметить, что может быть достаточно информации из других сигналов, которые не проходят через ретрансляторы, чтобы сделать возможным определить местоположение терминала без использования информации из сигналов, которые определенно проходят через ретранслятор. В любом случае знание того, что сигнал прошел через ретранслятор, и что дополнительные задержки внесены в сигнал ретранслятором, позволяет принять во внимание эти задержки, либо с помощью не использования информации синхронизации для этого сигнала, либо с помощью корректировки подходящим образом этой информации синхронизации.
В случае, в котором терминал обеспечивает ЭОМ кодами сигналов, принятых терминалом, с тем, чтобы ЭОМ мог определить, были ли переданы сигналы из ретранслятора, ЭОМ выполняет определение относительно того, использовать ли сигнал или нет, и может выбрать игнорировать любые сигналы, которые были переданы ретранслятором (не непосредственно приняты терминалом из базовой станции). В альтернативном варианте осуществления, в котором определение местоположения выполняют в терминале, или, в котором выполняют относительные измерения, которые требуют, чтобы терминал использовал информацию (такую как относительная фаза принятых сигналов), чтобы получить информацию, которая будет послана во внешнее устройство, такое как базовая станция или ЭОМ, терминал может выбрать игнорировать информацию, связанную с сигналами, которые приняты из ретранслятора.
Фиг. 7 - блок-схема терминала 1-6х, который может реализовывать различные аспекты и варианты осуществления раскрытых способа и устройства. По прямой линии связи сигналы из спутников ГСП, базовых станций и/или ретрансляторов принимаются антенной 712, направляются через дуплексор 714 и подаются в блок 722 РЧ приемника. Блок 722 РЧ приемника обрабатывает (например, фильтрует, усиливает и преобразует с понижением частоты) и преобразует в цифровую форму принятые сигналы, чтобы обеспечить выборки. Затем демодулятор 724 принимает и обрабатывает (например, сужает, восстанавливает и десодулирует пилот-сигнал) выборки, чтобы обеспечить восстановленные символы. Демодулятор 724 может реализовывать избирательный приемник, который может обрабатывать множество экземпляров принятого сигнала, и может объединять восстановленные символы для ряда множественных маршрутов. Процессор 726 принятых данных затем декодирует восстановленные символы, проверяет принятые кадры и обеспечивает выходные данные.
Для определения местоположения блоком 722 РЧ приемника можно управлять таким образом. Чтобы подавать в контроллер 730 времена прибытия для самых сильных принятых множественных маршрутов или множественных маршрутов, имеющих интенсивности сигналов, которые превышают определенный пороговый уровень. Выборки из блока 722 РЧ приемника также могут подаваться в устройство 728 оценки качества сигнала, которое оценивает качество принятых сигналов. Качество сигналов может быть оценено с использованием широко известных способов, таких как способы, описанные в патентах США №№ 5056109 и 5265119. Для определения местоположения демодулятором 724 можно управлять таким образом, чтобы обеспечивать ПШ последовательности, восстановленные из базовых станций, и ПШ идентификаторы, восстановленные из ретрансляторов, если имеются.
Приемник 740 ГСП принимает и ищет сигналы ГСП на основании поисковых окон, обеспеченных контроллером 730. Затем приемник 740 ГСП обеспечивает результаты измерений времени для спутников ГСП в контроллер 730. В определенных вариантах осуществления приемник 740 ГСП не включен в терминал 106х. Способы, описанные в настоящем описании, могут быть использованы для способов определения местоположения, которые не используют приемник ГСП.
Контроллер 730 принимает результаты измерений для базовых станций и/или спутников ГСП, ПШ последовательности для базовых станций, ПШ идентификаторы для ретрансляторов, оцененное качество сигнала принятых сигналов или их сочетание. В варианте осуществления результаты измерений и ПШ идентификаторы подают в процессор 742 ТХ, ПЕР (передачи) данных для передачи обратно в ЭОМ, который использует информацию для того, чтобы определить местоположение терминала 106х. Контроллер 730 может дополнительно обеспечивать сигналы, чтобы управлять устройствами в терминале 106х, чтобы выполнять соответствующую обработку сигнала. Например, контроллер 730 может подать первый сигнал в демодулятор 724, чтобы управлять поиском ПШ в определенном диапазоне смещения элементарной посылки, второй сигнал, указывающий поисковые окна, используемые приемником 740 ГСП для того, чтобы искать сигналы из спутников ГСП и т.д.
Демодулятор 724 ищет сильные составляющие указателей пилот-сигналов из базовых станций (которые могут ретранслироваться) и ПШ идентификатор (например, если направлен). Это может быть выполнено с помощью корреляции принятых выборок с локально сгенерированной ПШ последовательностью при различных смещениях. Хорошо скоррелированный результат указывает высокую вероятность того, что ПШ принят с этим смещением.
Различные схемы могут быть реализованы, чтобы гарантировать, чтобы демодулятор 724 искал ПШ идентификаторы из ретрансляторов как положено. В одной схеме ПШ идентификаторы включены в соседний список искомых ПШ последовательностей. Соседний список, поддерживаемый для каждого активного терминала, обычно включает в себя указатели сильных пилот-сигналов, обнаруженные терминалом. В другой схеме соседний список для каждого активного терминала посылают с помощью ЭОМ. В этом случае ЭОМ может быть обеспечен информацией относительно базовых станций в системе, связанных с ними ретрансляторов и ПШ идентификаторов для ретрансляторов. Тогда ЭОМ гарантирует, что в соседний список для каждого активного терминала включены правильные ПШ идентификаторы. Еще в одной схеме ЭОМ может автоматически посылать в терминал список ПШ для поиска, включая ПШ идентификаторы. Этот список может посылаться для определения местоположения, связанного с вызовами. Еще в одной схеме может выполняться широкое вещание списка ПШ идентификаторов в терминалы в широковещательном канале. Еще в одной схеме ЭОМ может посылать ПШ идентификаторы в терминал после запроса, например, когда известно, что ретрансляторы присутствуют, и не достаточно результатов измерений ГПС, чтобы выполнить определение местоположения.
В обратной линии связи данные обрабатывают (например, форматируют, кодируют) с помощью процессора 742 переданных (ПЕР) данных, дополнительно обрабатывают (например, покрывают, расширяют) с помощью модулятора (МОД) 744 и преобразуют (например, преобразуют в аналоговые сигналы, усиливают, фильтруют, модулируют и т.д.) с помощью блока 746 РЧ ПЕР, чтобы сгенерировать модулированный сигнал обратной линии связи. Информация (например, ПШ идентификатор) из контроллера 730 может быть мультиплексирована с обработанными данными с помощью модулятора 744. Модулированный сигнал обратной линии связи затем направляется через дуплексор 714 и передается через антенну 712 в базовые станции и/или ретрансляторы.
Фиг. 8 - блок-схема варианта осуществления ЭОМ 130, который может поддерживать различные аспекты раскрытых способа и устройства. ЭОМ 130 взаимодействует с КБС 120 и обменивается информацией, связанной с определением местоположения.
В обратной линии связи данные в модулированном сигнале обратной линии связи для терминала посылают в ретранслятор, передают в базовую станцию, направляют в КБС и подают в ЭОМ. В ЭОМ модулированный сигнал обратной линии связи из терминала обрабатывают с помощью приемопередатчика 814, чтобы обеспечить выборки, которые дополнительно обрабатывают с помощью процессора 822 принятых данных, чтобы восстановить данные, переданные терминалом. Эти данные могут включать в себя любые сочетания результатов измерений, ПШ идентификаторы и т.д., сообщенные терминалом. Затем процессор 822 данных подает принятые данные в контроллер 810.
Контроллер 810 также может принимать дополнительные данные из запоминающего устройства 830 данных (например, информацию, указывающую, ретранслирована ли базовая станция, центр зоны обслуживания и задержку, связанные с каждым ретранслятором и т.д.) и оценивает местоположение для терминала на основании данных из терминала и дополнительных данных из запоминающего устройства 830. Запоминающее устройство 830 может использоваться для того, чтобы хранить таблицу базовых станций, связанных с ними ретрансляторов (если имеются) и ПШ идентификатор и оценку местоположения (например, центр зоны обслуживания) для каждого ретранслятора.
В определенных вариантах осуществления контроллер 810 определяет ПШ идентификатор, включенный в соседний список для терминалов во всех секторах. Альтернативно ПШ идентификатор может подаваться контроллером 810 в терминал для случая, когда ПШ идентификаторы не включены в соседний список. ПШ идентификатор затем подают в процессор 812 ПЕР данных, который соответствующим образом форматирует и посылает данные в приемопередатчик 814. Приемопередатчик 814 дополнительно преобразует данные и посылает данные в терминал через КБС, базовую станцию и (возможно) ретранслятор.
Способы, описанные в настоящем описании, могут быть преимущественно использованы для определения местоположения в применениях внутри помещений, где сигналы из других базовых станций и/или спутников ГСП не могут приниматься, а зоны обслуживания ретрансляторов обычно являются малыми. Способы, описанные в настоящем описании, также могут быть использованы для применений вне помещений. В варианте осуществления ретранслятор вне помещения может быть откалиброван таким образом, чтобы определять задержку, связанную с ретранслятором. Сигнал идентификатора, переданный ретранслятором вне помещения, может быть использован для того, чтобы идентифицировать конкретный ретранслятор, через который модулированный сигнал прямой линии связи принимается терминалом. Результаты измерений для терминала в зоне обслуживания этого ретранслятора затем могут быть скорректированы соответствующим образом, чтобы получить более точные результаты измерений. Например, задержка из-за подтверждения приема (ЗПП) из местоположения ретранслятора может быть скорректирована на основании задержки, связанной с ретранслятором. Смещение времени в терминале также может быть скорректировано таким образом, чтобы отражать задержку ретранслятора, таким образом, давая возможность более точного указателя времени для измерений ГСП. Способы, описанные в настоящем описании, также могут быть использованы в случаях, когда двойные ПШ наблюдаются терминалом.
Как упомянуто выше, зона обслуживания ретранслятора для применений внутри помещений обычно является малой. Если центр зоны обслуживания ретранслятора предоставлен как оценка местоположения для терминала в зоне обслуживания ретранслятора, тогда погрешность мала во многих (если не в большинстве) случаях, и можно ожидать, что удовлетворяет приказу Е-911, изданному ФКС. В варианте осуществления элемент, ответственный за выполнение оценки местоположения (ЭОМ или терминал), также может быть обеспечен оценкой размера зоны обслуживания ретранслятора. В этом случае элемент может сообщать степень достоверности точности оценки местоположения (например, удовлетворяет ли она приказу Е-911 или нет).
Для ясности идентифицирующий код для каждого ретранслятора описан выше как реализованный с помощью ПШ последовательности с определенным смещением (ПШ INC). Идентифицирующий код для ретранслятора также может быть реализован различными другими способами. Например, идентифицирующий код может быть реализован с помощью любой ПШ последовательности (а не обязательно использования той же самой ПШ последовательности для расширения в системах МДКР), золотого кода, любого кода низкой скорости данных, который может быть модулирован в ретранслируемом сигнале, и т.д. Идентифицирующий код для ретранслятора может быть выровнен с системным временем или может не быть выровнен с системным временем, как наблюдаемым в терминале.
Для ясности различные аспекты и варианты осуществления конкретно описаны для системы МДКР IS-95. Способы, описанные в настоящем описании, также могут быть использованы для других типов систем МДКР и других систем не МДКР. Например, использование идентифицирующих кодов (например, ПШ идентификаторов) для идентификации ретранслятора также может применяться для системы Ш-МДКР, системы мдкр2000 и т.д. Идентифицирующие коды для идентификации ретранслятора также могут быть использованы для системы ГСП. Для системы ГСП идентифицирующий код может передаваться по "фиктивному" каналу (без данного смещения или со смещением) на другой частоте вместо той же самой частоты, используемой для модулированного сигнала прямой линии связи. Другой канал на другой частоте может использоваться для каждого ретранслятора в секторе или географической области, или ретранслятор может быть дифференцирован с помощью данных, передаваемых по данному каналу или с помощью смещения канала.
Идентифицирующий код также может передаваться с использованием способа связи широкого спектра в канале МДКР или с использованием некоторых других способов связи. В вариантах осуществления, описанных выше, идентифицирующий код для ретранслятора посылают одновременно с модулированным сигналом прямой линии связи с помощью ретранслятора. В некоторых других вариантах осуществления идентифицирующий код для ретранслятора может передаваться в другой "локальной" системе, такой как, например, радиосистема, работающая в то же самое время. Одной такой системой может быть система локальной сети IEEE-802.11.
Другие схемы также могут использоваться для того, чтобы идентифицировать ретрансляторы в системе радиосвязи. В одной схеме, если система и терминал могут сообщать многомаршрутный профиль, тогда идентифицирующий многомаршрутный профиль может быть создан на основании (например, модулированного сигнала прямой линии связи) и использован для идентификации ретранслятора. Терминалы МДКР обычно могут обрабатывать множество составляющих принятого сигнала, которые могут быть сгенерированы из отражений в маршруте сигнала. Множество маршрутов обычно демодулируют и объединяют с помощью терминала, чтобы обеспечить символы, которые затем декодируют. Если может быть сообщен профиль множества маршрутов, тогда каждый ретранслятор может быть связан с конкретным многомаршрутным профилем, вместо сигнала идентификатора.
Многомаршрутный профиль для каждого ретранслятора может быть сгенерирован различными способами. В одном варианте осуществления модулированный сигнал прямой линии связи задерживают (и, возможно, ослабляют) на множество конкретных величин, и множество задержанных сигналов объединяют и передают в терминалы. Число множества маршрутов и величина задержки для каждого множества маршрутов можно выбрать таким образом, чтобы был создан уникальный многомаршрутный профиль, и мог использоваться для того, чтобы индивидуально идентифицировать каждый ретранслятор. В другом варианте осуществления ПШ идентификатор может быть задержан на множество конкретных смещений элементарных сигналов, и задержанные ПШ последовательности могут быть объединены, чтобы обеспечить многомаршрутный профиль. Для этого варианта осуществления ПШ последовательность обслуживающей базовой станции может быть использована (вместо ПШ идентификатора), чтобы сгенерировать многомаршрутный профиль.
Идентификация ретранслятора также может передаваться через вспомогательный низкоскоростной канал МДКР, который может быть настроен с каналами МДКР из обслуживающей базовой станции. Затем идентифицирующий код для ретранслятора может быть передан как данные по низкоскоростному каналу.
Кроме упомянутых выше преимуществ от использования сигнала идентификатора, описанного в настоящем описании, другим преимуществом является возможность определять оценки местоположения, без необходимости разъединять речевой вызов. В соответствии со стандартом IS-801 результат измерения пилот-сигнала посылают в ЭОМ, когда терминал посылает запрос помощи от ГСП, чтобы оценить местоположение терминала. Если ЭОМ распознает ПШ идентификатор в списке ПШ последовательностей, сообщенный терминалом, вероятно, нет необходимости выполнять измерение ГСП, поскольку терминал находится в зоне обслуживания ретранслятора и никак не может принимать сигналы ГСП. Кроме того, оценка местоположения для терминала может быть определена с необходимой степенью точности только на основании ПШ идентификатора (например, местоположение терминала можно оценить как центр зоны обслуживания ретранслятора). В этом случае ПШ идентификатор включен в соседний список всех базовых станций, которые используют ретрансляторы, с тем, чтобы терминал искал ПШ идентификатор. Альтернативно, если ЭОМ имеет причину подозревать, что сигнал, принятый терминалом, передан ретранслятором, список ПШ идентификаторов может быть послан в терминал перед посылкой вспомогательной информации ГСП.
Некоторые из элементов ретранслятора, используемые для того, чтобы реализовать способы, описанные в настоящем описании (например, генератор ПШ, контроллер и преобразователь с повышением частоты) могут быть реализованы с помощью процессора цифровых сигналов (DSP, ПЦС), специализированной интегральной схемы (ASIC, СИС), процессора, микропроцессора, контроллера, микроконтроллера, вентильной матрицы, программируемой в условиях эксплуатации (FPGA, ВМПУЭ), программируемого логического устройства, другого электронного устройства или любой их комбинации, предназначенной для того, чтобы выполнять функции, описанные в настоящем описании. Определенные аспекты раскрытых способа и устройства могут быть реализованы в аппаратном обеспечении, программном обеспечении или их комбинации. Например, обработка, чтобы сформировать соседний список для каждого активного терминала, оценка местоположения терминала и т.д. могут быть выполнены на основе программных кодов, хранимых в устройстве памяти, и выполняемых процессором (контроллером 810 на фиг. 8).
Предыдущее описание раскрытых вариантов осуществления предлагаемого изобретения предоставлено для того, чтобы дать возможность любому специалисту в данной области техники изготовить или использовать настоящие раскрытые выше способ и устройство. Различные модификации этих вариантов осуществления будут без труда быть понятны специалистам в данной области техники, а основные принципы, определенные в настоящем описании, могут применяться в других вариантах осуществления, не выходя за рамки объема и сущности изобретения. Следовательно, не подразумевается, что настоящее изобретение ограничено вариантами осуществления, раскрытыми в настоящем описании, а должны соответствовать самому широкому объему, согласующемуся с принципами и признаками, раскрытыми в прилагаемой формуле изобретения.
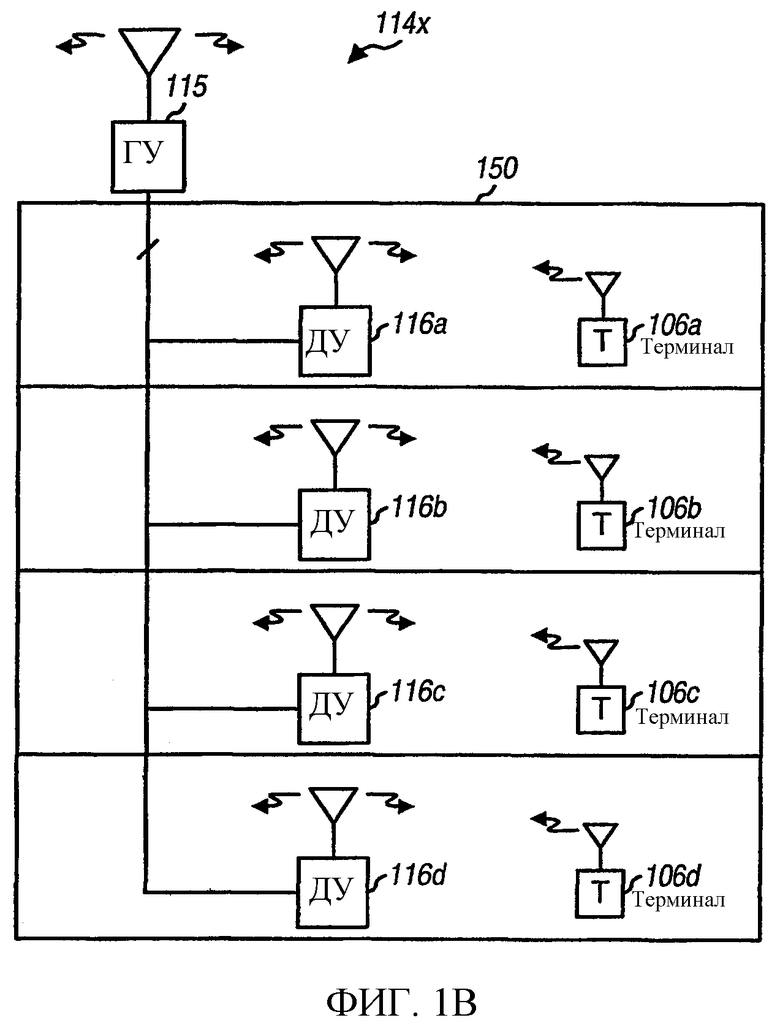


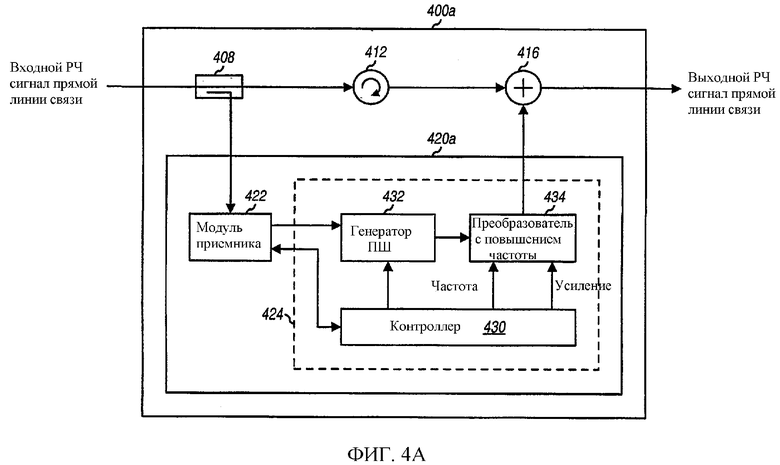
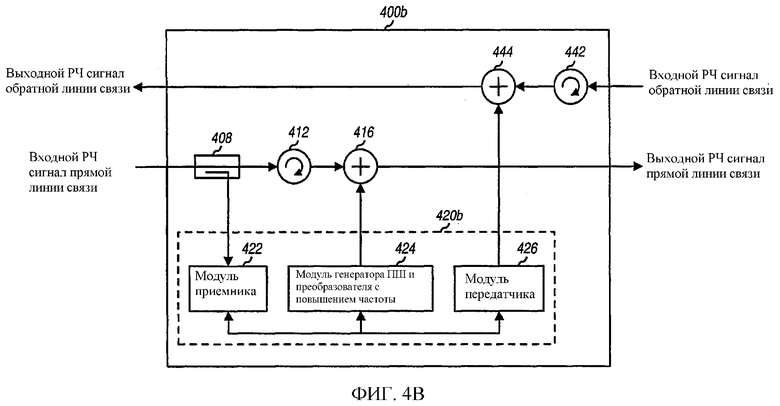







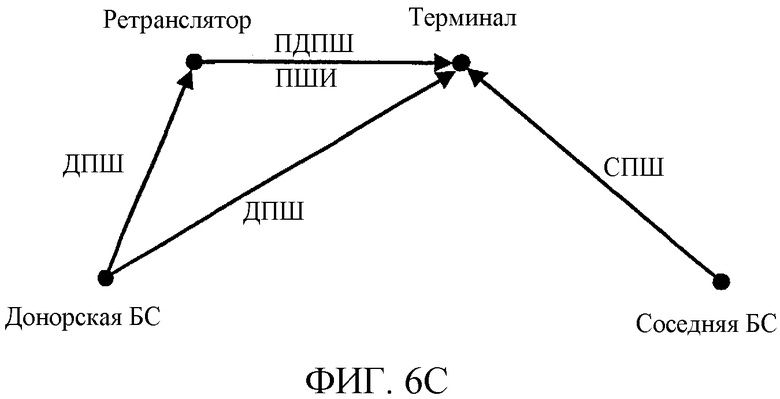

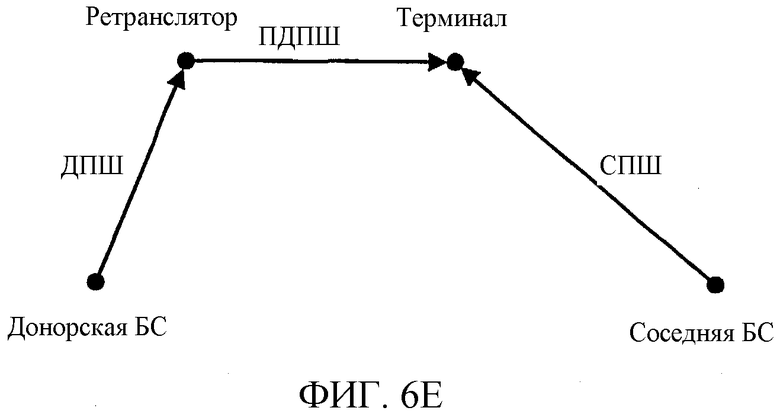


Предлагается способ, предназначенный для определения местоположения терминала в зоне обслуживания ретранслятора в системе радиосвязи. В одном аспекте идентифицирующий код передают для каждого ретранслятора и используют терминалом (или элементом определения местоположения (ЭОМ)), чтобы однозначно идентифицировать ретранслятор. Идентифицирующие коды для ретрансляторов могут быть реализованы с помощью псевдошумовых (ПШ) последовательностей с определенными смещениями, которые специально зарезервированы для идентификации ретранслятора. В другом аспекте идентифицирующие коды для каждого ретранслятора передают с использованием сигнала широкого спектра, составленного таким образом, чтобы иметь минимальное влияние на функционирование системы и быть восстанавливаемым с помощью терминала аналогичным способом, как и для модулированного сигнала прямой линии связи. Таким образом, не требуется никакого дополнительного аппаратного обеспечения для терминала, чтобы восстанавливать сигнал идентификатора. Техническим результатом является обеспечение оценки местоположения терминала в системе радиосвязи, которая использует ретрансляторы. 13 н. и 46 з.п. ф-лы, 18 ил., табл. 1.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| US 5263177 A, 16.11.1993 | |||
| WO 00/51392 A, 31.08.2000. | |||

