Изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для определения местоположения мобильной станции.
Постоянное повышение качества и расширение сферы услуг в системах сотовой мобильной связи делает особенно актуальным решение задачи определения местоположения абонентской мобильной станции (МС). Локация необходима для нахождения объекта, нуждающегося в медицинской, полицейской или другой помощи, для осуществления диспетчерских функций парка машин, например, "скорой помощи" или такси, для специальных полицейских или военных целей и др. Локация может осуществляться различными способами одним из которых является радиолокация. Эффективным методом радиолокации объекта является дальнометрический. Это метод, в котором расстояния между МС и каждой из нескольких базовых станций (БС) оцениваются по разности времен передачи и приема сигнала. Знание этих расстояний, а также известные координаты каждой из БС позволяют вычислить координаты МС. Примерами подобных способов локации могут служить методы, описанные в патентах: US N 5736964: Method and apparatus for location finding in CDMA system. April 7, 1997, US N 5732354: Method and apparatus for determining the location of mobile telephone. March 24, 1998, US N 5166694: Vehicle location system having enhanced position location processing. Nov. 24, 1992.
Все приведенные способы локации не исключают возможности ошибок в определении координат мобильной станции. Ошибки могут быть обусловлены как искажениями сигнала типа фединг или шум, так и наличием препятствий на пути распространения сигнала, в результате которого сигнал проходит расстояние большее, чем расстояние между станциями. Вероятность ошибки, связанная с шумом или федингом, может быть уменьшена до необходимого значения за счет повышения мощности передаваемого сигнала. Гораздо труднее уменьшить ошибку, связанную с отсутствием прямого луча распространения сигнала из-за соответствующего рельефа местности. Поэтому один из наиболее важных аспектов борьбы с ошибками в определении местоположения, минимизация ошибки локации связанной с отсутствием прямого луча в канале распространения.
Один из способов повышения точности локации в условиях отсутствия прямого луча распространения сигнала описан в патенте WO 98/14018 Method and system for mobile location estimation. M. Wylie, 2 April, 1998. В этом способе предлагается в процессе локации определять наличие или отсутствие прямого луча и в соответствии с принятым решением проводить коррекцию измерений. С этой целью на каждой из БС, принимающих участие в локации, проводится последовательность измерений расстояния до МС. Решающей величиной для определения наличия или отсутствия прямого луча распространения предлагается использовать величину дисперсии оценки этих измерений. Полученная величина дисперсии сравнивается с порогом, которым служит величина дисперсии, обусловленная шумом. Если решающая величина превышает порог, то принимается решение об отсутствии прямого луча. В этом же патенте предлагается способ коррекции измерений в случае принятия решения об отсутствии прямого луча.
Недостатками такого решения являются, во-первых, большое время, необходимое для проведения локации. Это связано с тем, что различение между прямым и непрямым лучами проводится по результатам последовательности измерений расстояния. Таких измерений требуется много. В примерах, приведенных в описании. WO 98/14018 Method and system for mobile location estimation. M. Wylie, 2 April, 1998, говорится о последовательности в 100 - 200 измерений.
Другим недостатком такого решения является то, что принятие решения об отсутствии прямого луча основано на степени отклонения от среднего значения измеренных оценок расстояния. Однако возможны ситуации, когда больших отклонений не будет даже при отсутствии прямого луча. Такая ситуация может возникнуть, например, при локации на местности с однородной застройкой в городских условиях. В подобных условиях точность этого метода будет низкой.
Наиболее близким к заявляемому решению является метод, описанный в статье "Subscriber location in CDMA cellular networks". J. Gaffery, IEEE transactions on vehicular technology, vol.47, no. 2, may 1998. В статье он называется, как "Unconstrated NL-LS".
Такой способ локации заключается в том, что:
оценивают расстояния от мобильной станции до каждой из М базовых станций, на основании приема М сигналов локации, соответствующих каждой базовой станции,
уточняют расстояния, добавляя к каждому из них величину систематической погрешности в определении расстояния,
для каждой БС определяют меру ошибки, представляющей собой квадрат разности между оценкой расстояния и расстоянием до предполагаемого местоположения МС,
для каждой БС определяют весовой коэффициент меры ошибки,
за истинные координаты МС принимают те, для которых сумма взвешенных мер ошибок минимальна при различных гипотезах о величине систематической погрешности.
Согласно этому способу сначала проводится предварительная оценка расстояний от МС до каждой из трех БС: di=c•(ti-t0).
Здесь t0 - время начала передачи сигнала локации на МС ti - время приема сигнала локации на i-й БС (i=1...М); с - скорость света.
Затем расстояния уточняются изменением их на величину систематической погрешности c• Δ , где Δ t = t0-t - систематическая погрешность оценки разности времен приема и передачи сигнала локации. Таким образом, формируются уточненные расстояния
(1) di=c•(ti-t)
Для каждой БС определяется мера ошибки между полученным уточненным расстоянием и фактическим расстоянием до МС с предполагаемыми координатами (x, у).

Суммарная мера ошибок измерений для всех БС определяется, как взвешенная сумма квадратичных значений мер ошибок, сформированных для каждой БС
Здесь X={x, y, t} - вектор независимых переменных;
α
Находятся значение вектора независимых переменных X={x, у, t}, обеспечивающее минимум данной функции. Полученные значения x, у считаются окончательными координатами МС. Минимум функции трех переменных F(X) может быть найден известными математическими методами, например, градиентным методом, который предлагается в статье.
Недостатком такого способа является, невысокая точность локации, обусловленная тем, что не любые ошибки в измерении расстояний до множества базовых станций могут быть скомпенсированы таким способом. Это связано с тем, что компенсация измерения расстояния выполняется с помощью величины t, которая обеспечивает величину компенсации расстояния с• Δ. При различных значениях величины абсолютной ошибки на разных базовых станциях невозможно их скомпенсировать добавлением одной и той же величины c• Δ t. Добавление одной и той же величины, компенсируя ошибки одних оценок, значительно увеличивает ошибки других оценок. Поэтому минимум суммарной функции ошибки не всегда располагается в точке фактического местоположения мобильной станции. Выбор различных весовых коэффициентов α
Задачей, которую решает данное изобретение, является повышение точности локации мобильного абонента в условиях отсутствия прямого луча распространения сигнала.
Задача решается за счет того, что в способ локации, заключающийся в том, что:
оценивают расстояния от мобильной станции до каждой из М базовых станций, на основании приема М сигналов локации, соответствующих каждой базовой станции,
уточняют расстояния, добавляя к каждому из них величину систематической погрешности в определении расстояния,
для каждой БС определяют меру ошибки,
для каждой БС определяют весовой коэффициент меры ошибки,
за истинные координаты МС принимают те, для которых сумма взвешенных мер ошибок минимальна при различных гипотезах о величине систематической погрешности.
дополнительно введены следующие операции:
определяют, является ли каждый из М сигналов локации сигналом прямого или непрямого распространения,
при этом по последовательности отсчетов амплитуды каждого из сигналов локации оценивают отношение дисперсии к квадрату среднего значения,
полученную оценку сравнивают с величиной порога,
если порог не превышен, то принимают решение о наличии прямого луча при приеме сигнала локации, в противном случае принимают решение об отсутствии прямого луча и в этом случае корректируют расстояние на величину предполагаемой разности хода между прямым и отраженным лучом, определяя скорректированную меру ошибки,
меру ошибки определяют как квадрат разности между скорректированным расстоянием и расстоянием до предполагаемого местоположения МС,
весовые коэффициенты определяют, как функцию отношения дисперсии амплитуды к квадрату среднего значения и отношения сигнал-шум соответствующего сигнала локации.
Каждый из весовых коэффициентов определяют, например, как произведение коэффициента отношения дисперсии к квадрату среднего значения амплитуды на коэффициент отношения сигнал-шум соответствующего сигнала локации.
Коэффициент отношения дисперсии к квадрату среднего значения амплитуды сигнала локации определяют, равным единице, если отношение дисперсии к квадрату среднего значения амплитуды меньше порога и как некоторое значение меньше единицы, если отношение дисперсии к квадрату среднего значения амплитуды больше или равно порогу.
Коэффициент отношения сигнал-шум сигнала локации определяют, равным единице, если отношение сигнал-шум выше или равно значению, обеспечивающему заданную точность измерения, и как некоторое значение меньше единицы, если отношение сигнал-шум ниже значения, обеспечивающего заданную точность измерения.
Величину порога корректируют в зависимости от отношения сигнал-шум.
Сопоставительный анализ способа определения местоположения мобильного абонента с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить точность локации мобильного абонента в условиях отсутствия прямого луча распространения сигнала.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ определения местоположения мобильного абонента отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Графические материалы, поясняющие данное изобретение.
Фиг. 1 - обобщенная схема устройства локации.
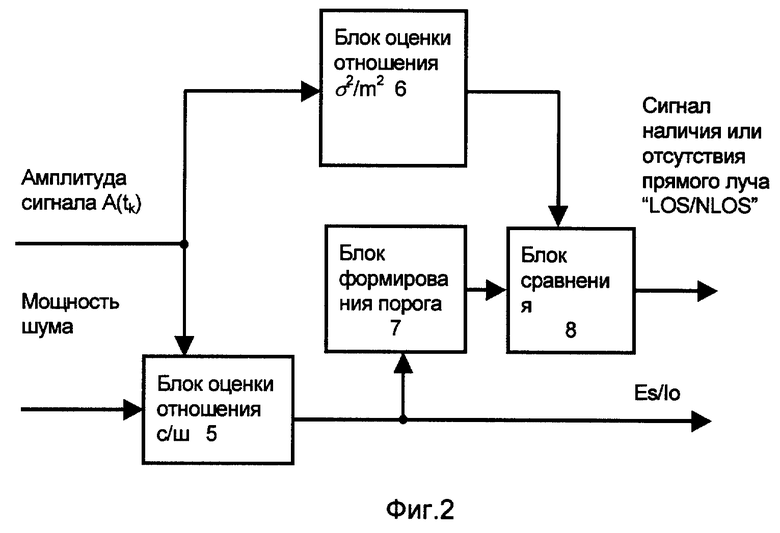
Фиг. 2 - вариант выполнения блока оценки канала распространения.
Фиг. 3 - алгоритм работы блока оценки координат мобильной станции.
Фиг. 4 - определение наиболее вероятной зоны локации мобильной станции.
Фиг. 5 - радиус зоны рассеяния около мобильной станции.
Предлагаемый способ заключается в следующем:
оценивают расстояния от мобильной станции до каждой из М базовых станций, на основании приема М сигналов локации, соответствующих каждой базовой станции,
уточняют расстояния, добавляя к каждому из них величину систематической погрешности в определении расстояния,
определяют, является ли каждый из М сигналов локации сигналом прямого или непрямого распространения,
при этом по последовательности отсчетов амплитуды каждого из сигналов локации оценивают отношение дисперсии к квадрату среднего значения,
полученную оценку сравнивают с величиной порога,
если порог не превышен, то принимают решение о наличии прямого луча при приеме сигнала локации, в противном случае принимают решение об отсутствии прямого луча и в этом случае корректируют расстояние на величину предполагаемой разности хода между прямым и отраженным лучом, определяя скорректированную меру ошибки,
для каждой БС определяют меру ошибки как квадрат разности между скорректированным расстоянием и расстоянием до предполагаемого местоположения МС,
для каждой БС определяют весовой коэффициент, как функцию отношения дисперсии амплитуды к квадрату среднего значения и отношения сигнал-шум соответствующего сигнала локации,
за истинные координаты МС принимают те, для которых сумма взвешенных мер ошибок минимальна при различных гипотезах о величине систематической погрешности.
Причем каждый из весовых коэффициентов можно определить, как произведение коэффициента отношения дисперсии к квадрату среднего значения амплитуды на коэффициент отношения сигнал-шум соответствующего сигнала локации.
Каждый из весовых коэффициентов определяют, например, как произведение коэффициента отношения дисперсии к квадрату среднего значения амплитуды на коэффициент отношения сигнал-шум соответствующего сигнала локации.
Коэффициент отношения дисперсии к квадрату среднего значения амплитуды сигнала локации определяют, равным единице, если отношение дисперсии к квадрату среднего значения амплитуды меньше порога и как некоторое значение меньше единицы, если отношение дисперсии к квадрату среднего значения амплитуды больше или равно порогу.
Коэффициент отношения сигнал-шум сигнала локации определяют, равным единице, если отношение сигнал-шум выше или равно значению, обеспечивающему заданную точность измерения, и как некоторое значение меньше единицы, если отношение сигнал-шум ниже значения, обеспечивающего заданную точность измерения.
Величину порога корректируют, например, в зависимости от отношения сигнал-шум.
В заявляемом решении проводятся измерения расстояний di, от мобильной станции до каждой из М базовых станций (i= 1...М), принимающих участие в процессе локации. Наиболее предпочтительный способ измерения основан, на измерении времени задержки сигнала локации, переданного мобильной станцией и принятого на каждой из базовой станции.
При этом для передачи сигналов локации может использоваться стандартная процедура передачи проб с увеличением мощности [Процедура PUF (Power Up Function, см. стандарт IS-95. TIA/EIA IS-95. Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread- Spectrum Cellular Systems. Telecommunication Industry Association, july 1993.)]. Эта процедура состоит в том, что по сигналу, поступившему от управляющей базовой станции, мобильная станция начинает последовательную передачу сигналов нарастающей мощности, так называемых PUF-проб. PUF-пробы передаются до получения сигнала о прекращении процедуры или после передачи некоторого максимального количества проб, оговоренного в протоколах обмена информацией между МС и БС в сотовой системе связи.
После начала процедуры локации управляющая базовая станция получает информацию от других базовых станций, принимающих участие в локации, о времени распространения сигнала локации, или о величине измеренного расстояния di до каждой конкретной базовой станции.
Затем формируются значения коррекции Δ di для каждого из измеренных расстояний (i=1...М).
При этом сначала определяется факт наличия или отсутствия прямого луча распространения сигнала на каждой из БС, а затем оценивается максимальное смещение оценки расстояния из-за отсутствия прямого луча.
В заявляемом решении предлагается использовать статистику распределения отсчетов амплитуды входного сигнала для определения факта наличия или отсутствия прямого луча. Это решение основано на известном факте отличия плотностей распределения отсчетов входного сигнала для этих двух случаев. Известно, что отсутствие прямого луча приводит к тому, что в точке приема суммируется множество компонент сигнала с независимыми фазами, что обусловливает релеевскую плотность распределения вероятностей отсчетов амплитуды сигнала (см. , например, Andrew J. Viterbi, CDMA Principles of Spread Spectrum Communication. Addison-Wesley Communication Series. 1995). Наличие компоненты прямого луча приводит к изменению плотности распределения (см., например, Parallel Acquisition of Spread-Spectrum Signal with Antenna Divercity. By Roland R. Rick and Laurence B. Milstein./ in IEEE Trans. On Cоmmunication, vol. 45, N 8, august 1997./ p. 903 - 905).
Различить эти плотности распределения вероятности можно, например, по отношению дисперсии к квадрату среднего значения сигнала σ2 /m2. Эта величина зависит от отношения мощности сигнала прямого луча к мощности рассеянных компонент и от отношения сигнал-шум Es/I0. (Es) - энергия сигнала на интервале наблюдения, I0 - спектральная плотность мощности помехи).
Например, в условиях Es/I0=4.5 dB:
σ2 /m2= 0.132, при наличии прямого луча и полном отсутствии рассеянных компонент;
σ2 /m2=0.269 при отсутствии прямого луча;
В условиях Es/I0=6.5 dB:
σ2 /m2= 0.093, при наличии прямого луча и полном отсутствии рассеянных компонент;
σ2 /m2=0.272 при отсутствии прямого луча;
Данные оценки получены с использованием формул для релеевской и обобщенной релеевской плотностей распределения вероятностей амплитуды сигнала [Andrew J. Viterbi, CDMA Principles of Spread Spectrum Communication. Addison-Wesley Communication Series. 1995 p. 74 - 75].
Таким образом, решение о наличии прямого луча может быть принято по результатам сравнения с порогом величины σ2/m2. При выборе порога можно учесть отношение Es/I0 которое создается в точке приема сигнала локации. При этом необходимое значение порога может просто выбираться из ячейки памяти, соответствующей тому или иному значению Es/I0. В ячейки памяти заносятся значения σ2 /m2 при наличии прямого луча. При работе в небольшом диапазоне изменений отношения сигнал-шум значение порога может быть постоянным.
Достоинство такого способа вынесения решения о наличии прямого луча в том, что для него не требуется проводить множество измерений расстояния, решение может быть вынесено для каждого отдельного измерения расстояния. Для оценки величины σ2 /m2 могут быть использованы отсчеты амплитуды сигнала, сформированные в течение последней PUF пробы, а также в течение предыдущих PUF проб процедуры локации.
Величины коррекции Δ di могут быть сформированы следующим образом. Если для каких-либо из измеренных расстояний определен факт наличия прямого луча распространения, то это означает, что коррекции данных расстояний не требуется и соответствующие Δ di = 0. Если установлен факт отсутствия прямого луча, то для таких расстояний необходимо определить значение соответствующей величины коррекции Δ di. Это может быть сделано из следующих соображений. Известно, что погрешность измерения расстояния, обусловленная отсутствием прямого луча распространения, зависит от радиуса объектов рассеяния около мобильной станции (фиг. 5) (см. "Subscriber location in CDMA cellular networks''. J. Gaffery, IEEE transactions on vehicular technology, vol.47, N 2, may 1998. ). Поэтому за значение Δ di можно принять величину, пропорциональную радиусу объектов рассеяния. Оценка радиуса объектов рассеяния около мобильной станции может быть проведена по предварительно определенной области локации мобильной станции на основании известной карты местности сотовой системы или по результатам радиолокационных испытаний каналов распространения сигнала.
После определения величин коррекции Δ di для каждой БС формируется мера ошибки измерения:
Здесь Δ di, - величина коррекции измеренного расстояния по результатам оценки канала распространения каждого из М сигналов локации;
Δ di - предполагаемая систематическая ошибка измерения,
xi, yi - координаты базовой станции,
X= { x, y, Δ di} вектор независимых переменных, который представляет совокупность координат мобильной станции и величины систематической ошибки измерения,
Затем формируется суммарная мера ошибок измерения аналогично способу прототипа:
где αi - веса, которые определяются, исходя из измеренных отношения σ2 /m2 дисперсии к квадрату среднего значения амплитуды сигнала и отношения сигнал-шум Es/I0> на каждой базовой станции.
Оценки координат мобильной станции формируются следующим образом. Находится значение X={x, у, Δ d}, обеспечивающее минимум функции суммарной меры ошибки F(X). Полученные значения x, у считаются уточненными координатами мобильной станции. Одним из способов определения минимума F(X) может быть простая табуляция функции в области предполагаемой зоны локации при различных гипотезах о величине систематической ошибки Δ ds с определенным шагом.
По полученным таблицам может быть определена точка минимума.
Определение минимума функции F(X) может быть также проведено любым известным математическим методом, например, как указано в книге Г. Корн, Т. Корн. Справочник по математике для научных работников и инженеров. М.: Наука, 1978, в том числе и градиентным методом, который использован в прототипе.
Для первого шага градиентного метода требуется начальное значение оценки координат МС (x1, y1).
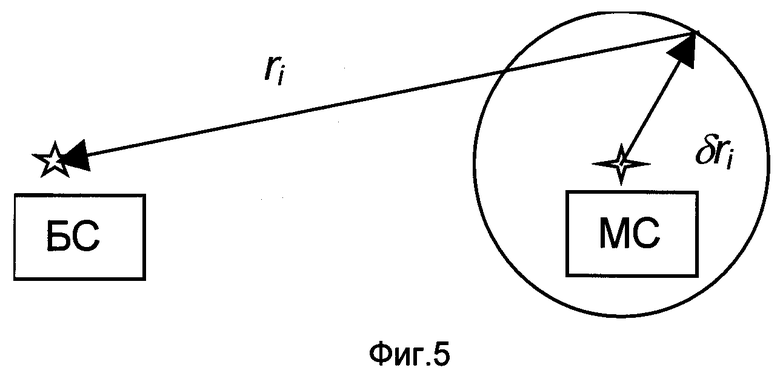
Значения (x1, y1) могут быть, например, определены как среднее арифметическое координат точек пересечения окружностей, образовавших предполагаемую зону локации. Предполагаемая зона локации образуется пересекающимися окружностями, с центрами в точках положения каждой из М базовых станций, и радиусами, равными измеренным расстояниям (фиг. 4).
Новые значения координат на каждом шаге итераций находятся из уравнений:
(6) Xk+1= Xk-μ•▿xF(Xk),
где Xk={Xk, Yk, dk}T, ▿x = d/dX; ▿x F(Xk) - вектор значений производных функций F(X) по соответствующим координатам в т. Xk; μ = {μx,μy,μd} вектор значений шага итерации по каждой переменной.
После выполнения каждого шага итераций формируется оценка производных ▿x F(Xk+1) в новой точке. Алгоритм завершается, если значения всех производных становятся ниже определенной величины.
Таким образом, в отличие от способа прототипа заявляемый метод предполагает в функции суммарной меры ошибки F(X) использовать индивидуально скорректированные значения расстояний di+ Δ di, что позволяет скомпенсировать ошибки измерения одних расстояний, не внося дополнительных погрешностей в другие расстояния. Введение корректирующих величин в функцию суммарной меры ошибок измерения приближает точку минимума функции F(X) к точке фактического положения МС.
Таким образом, заявляемый способ локации позволяет значительно, по сравнению со способом прототипа, уменьшить ошибки, связанные с отсутствием прямого луча, и при этом сократить время, необходимое для формирования уточненной оценки координат МС, по сравнению с аналогичным способом (WO 98/14018 Method and system for mobile location estimation, M. Wylie, 2 April, 1998).
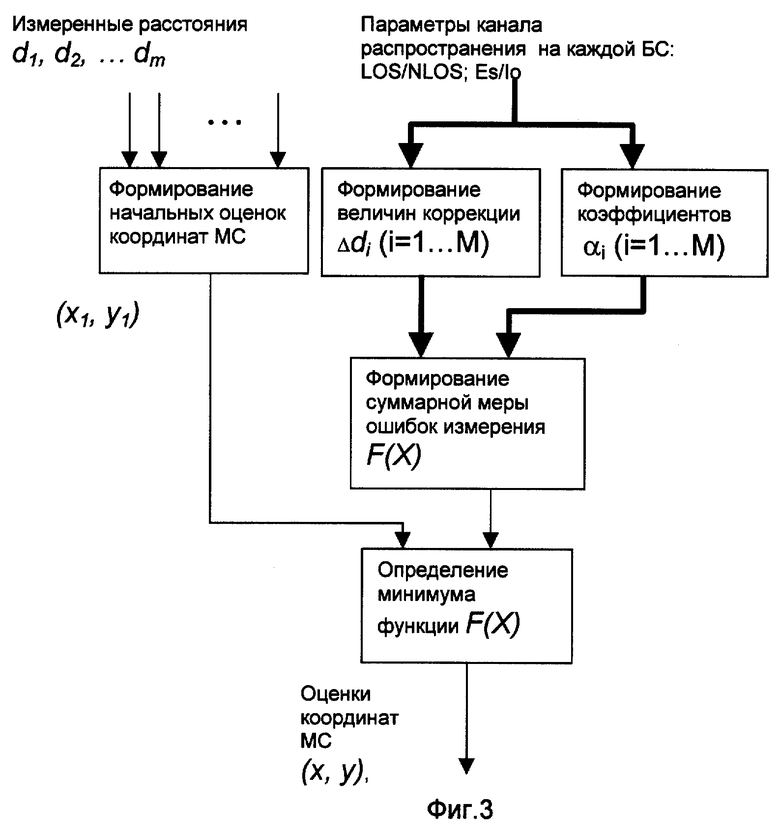
Процесс локации может быть выполнен с помощью устройства, блок-схема которого приведена на фиг. 1, которое состоит из М демодуляторов сигналов локации 1, М блоков вычисления расстояния между МС и каждой БС 2, М блоков оценки канала распространения 3 на каждой БС и блока формирования оценок координат 4. Демодуляторы сигналов локации 1 располагаются на соответствующих БС. Блоки вычисления расстояния 2 и блоки оценки каналов распространения 3 могут также находиться в составе каждой из М базовых станциях, принимающих участие в локации. При этом информация об измеренных расстояниях может передаваться на контрольную БС по соответствующим каналам обмена данными.
С первых выходов демодуляторов 1 на входы блоков вычисления расстояния 2 поступают значения временных интервалов, между моментами передачи и приема соответствующих сигналов локации. В блоках вычисления расстояния 2 по этим значениям формируется величина расстояния согласно формуле (1).
На втором и третьем выходах каждого из демодуляторов сигналов локации 1 формируются значения оценки амплитуды и мощности шума, соответственно. Эти значения поступают на первый и второй входы каждого из блоков оценки канала распространения сигнала 3.
Вариант выполнения блока оценки канала распространения сигнала 3 приведен на фиг. 2. Блок оценки канала распространения содержит блок оценки отношения сигнал-шум 5, блок оценки отношения σ2/m2 6, блок формирования порога 7 и блок сравнения 8. При этом объединенный вход блока оценки отношения σ2 /m2 6 и первого входа блока оценки отношения сигнал-шум 5 является входом амплитуды сигнала блока оценки канала распространения 3. Второй вход блока оценки отношения сигнал-шум 5 является входом величины мощности шума блока оценки канала распространения 3. Выход блока оценки отношения сигнал-шум 5 соединен со входом блока формирования порога 7 и является выходом оценки отношения сигнал-шум блока оценки канала распространения 3. Первый вход блока сравнения 8 соединен с выходом блока формирования порога 7, второй вход блока сравнения 8 соединен с выходом блока оценки отношении σ2 /m2 6, а выход блока сравнения 8 является выходом сигнала наличия или отсутствия прямого луча блока оценки канала распространения 3.
Блок оценки канала распространения 3 работает следующим образом.
Полученные оценки амплитуды сигнала и мощности шума поступают на вход блока оценки отношения сигнал-шум 5, где формируется соответствующая оценка.
Последовательность отсчетов амплитуды A(tk) в моменты времени tk (k=1... K), поступает на вход блока оценки отношения σ2 /m2 6. В блоке оценки отношения σ2 /m2 6 вычисляется соответствующая оценка, в соответствии с выражениями:
Оценка отношения сигнал-шум, сформированная в блоке оценки отношения сигнал-шум 5, поступает на вход блока формирования порога 7, где значение порога, соответствующее данному значению отношения сигнал-шум, выбирается из соответствующей ячейки памяти и поступает на вход блока. В частном случае порог может быть постоянным.
Отношение σ2 /m2 дисперсии к квадрату среднего значения амплитуды сигнала локации с выхода блока 6 поступает на первый вход блока сравнения 8. На второй вход блока сравнения 8 поступает величина порога. Если величина σ2 /m2 превышает порог, то формируется сигнал "NLOS" - об отсутствии прямого луча. В противном случае в блоке сравнения 8 формируется сигнал "LOS" - о наличии прямого луча.
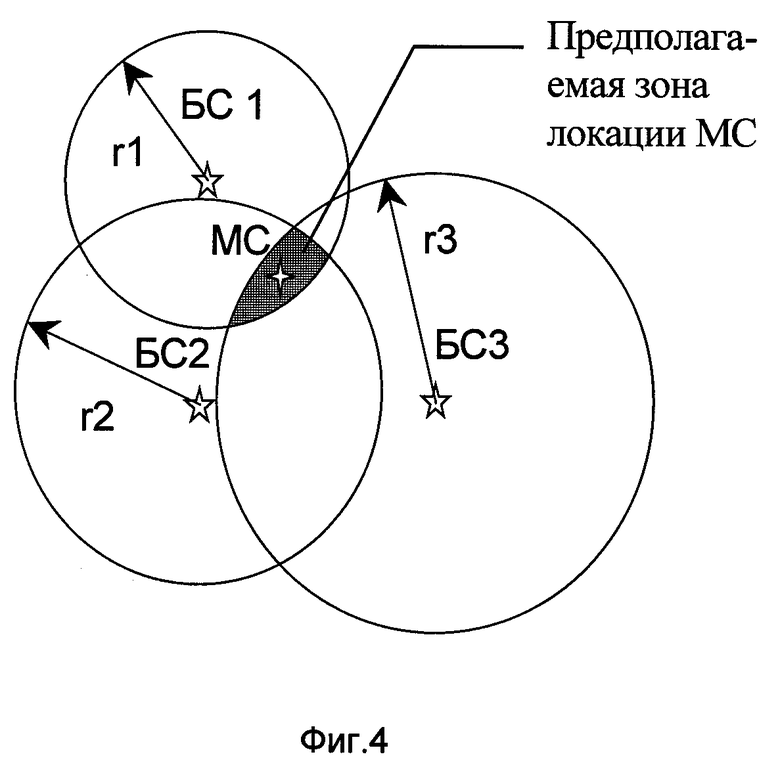
Алгоритм работы блока формирования оценок координат 4 представлен на фиг. 3.
Начальные оценки координат МС (x1, y1) могут быть определены в соответствии с измеренными расстояниями методами, описанными в статье ["Subscriber location in CDMA cellular networks". J. Gaffery, IEEE transactions on vehicular technology, vol.47, N 2, may 1998].
Например, значения (x1, y1) могут быть определены как среднее арифметическое координат точек пересечения окружностей, образовавших предполагаемую зону локации. Предполагаемая зона локации образуется пересекающимися окружностями, с центрами в точках положения каждой из М БС, и радиусами, равными измеренным расстояниям (фиг. 4).
Значения величин коррекции Δ di формируются следующим способом:
Δ di = 0, если для данного i-го сигнала локации было принято решение о наличии прямого луча.
Δdi= β•2r;
где r - средний радиус объектов рассеяния в предполагаемой зоне локации; r определяется, например, по карте местности и/или по результатам тестирования каналов распространения в данной сотовой системе связи;
β - некоторый коэффициент < 1.
Весовые коэффициенты α
α
где bi=1 для сигналов локации, принятых при достаточно высоком отношении сигнал-шум, обеспечивающем хорошую точность измерения;
bi < 1 для сигналов локации, принятых при низком отношении сигнал-шум;
ci=1 для сигналов локации, у которых отношение дисперсии к квадрату среднего значения ниже порога;
ci < 1 для сигналов локации, у которых отношение дисперсии к квадрату среднего значения выше или равно порогу.
Не исключаются и другие способы формирования весовых коэффициентов, которые позволят повысить точность оценки координат. Суммарная мера ошибок измерения формируется согласно формуле (5).
Определение минимума функции F(X) может быть проведено любым известным математическим методом, например, как указано в книге Г. Корн, Т. Корн. Справочник по математике для научных работников и инженеров. M.: Hаука, 1978, в том числе и градиентным методом, который был описан выше.
Не исключаются и другие способы отыскания минимума функции суммарной меры ошибок F(X). Например, значения функции F(X) могут быть протабулированы с некоторым шагом внутри предполагаемой зоны локации для нескольких возможных гипотез о значении систематической ошибки Δ ds. Точка (x*, y*, Δ ds *), соответствующая минимуму F(X) может быть определена по сформированным таблицам. Полученные значения (x*, y*) принимаются за оценки координат МС.
Все перечисленные функции блока формирования оценок координат могут быть реализованы, например, в виде программы и выполняться в цифровом микропроцессоре.
Таким образом, в отличие от способа прототипа заявляемый метод предполагает в функции суммарной меры ошибки F(X) использовать индивидуально скорректированные значения расстояний di+ Δ di, что позволяет скомпенсировать ошибки измерения одних расстояний, не внося дополнительных погрешностей в другие расстояния. Введение корректирующих величин Δ di, в функцию суммарной меры ошибок измерения значительно приближает точку минимума функции F(X) к точке фактического положения МС.
Таким образом, заявляемый способ локации позволяет значительно, по сравнению со способом прототипа, уменьшить ошибки, связанные с отсутствием прямого луча.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2001 |
|
RU2252429C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ | 2002 |
|
RU2248669C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2004 |
|
RU2272356C1 |
| СПОСОБ НАПРАВЛЕННОЙ ПЕРЕДАЧИ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2278471C2 |
| СПОСОБ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2208911C2 |
| СПОСОБ КОГЕРЕНТНОЙ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛА | 2001 |
|
RU2192094C1 |
| СПОСОБ КВАЗИКОГЕРЕНТНОГО ПРИЕМА СИГНАЛА | 1999 |
|
RU2174743C2 |
Способ определения местоположения мобильного абонента относится к области радиолокации и может быть использован в сотовых системах связи для определения местоположения мобильной станции (МС), для нахождения объекта, нуждающегося в помощи, для осуществления диспетчерских функций. Достигаемый технический результат - повышение точности локации мобильного абонента в условиях отсутствия прямого луча распространения сигнала и сокращение времени, необходимого для формирования уточненной оценки координат МС. В заявленном способе с целью определения факта наличия или отсутствия прямого луча распространения используется статистика распределения отсчетов амплитуды входного сигнала. Для вынесения решения о наличии прямого луча распространения не требуется проводить множество измерений расстояния. Решение принимается на основе оценки отношения дисперсии амплитуды сигнала к квадрату ее среднего значения, производимой по последовательности отсчетов амплитуды каждого из сигналов локации. 4 з.п.ф-лы, 5 ил.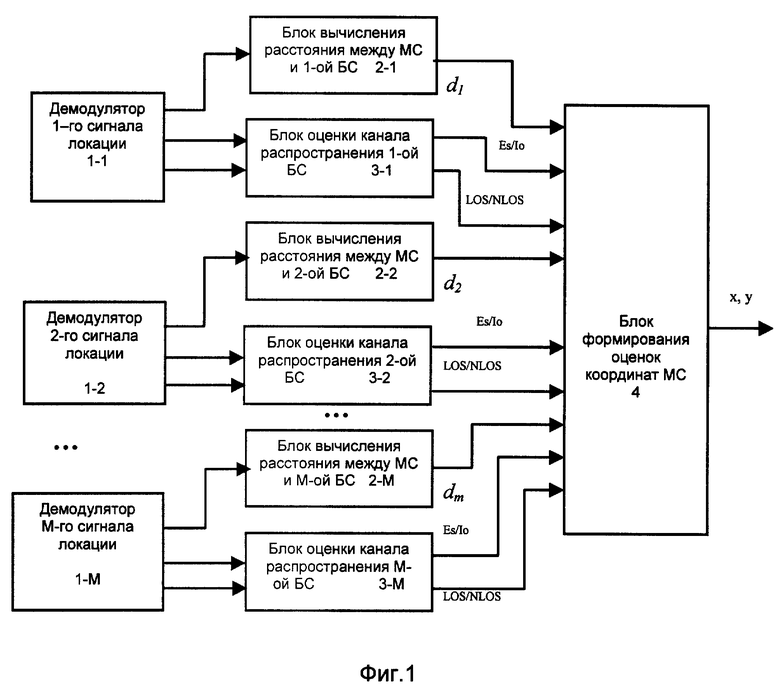
| GAFFERY J | |||
| Subscrider lokation in CDMA cellular networks | |||
| IEEE transactions on vehicular technology | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ В СИСТЕМЕ РАДИОСВЯЗИ С МНОГОСТАНЦИОННЫМ ДОСТУПОМ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1996 |
|
RU2127963C1 |
| RU 95101384 A1, 20.11.1996 | |||
| US 5629707 A, 13.05.1997 | |||
| US 5257405 A, 26.10.1993. | |||

