Область техники, к которой относится изобретение
Это изобретение относится к системам определения местоположения, которые используют беспроводные сигналы, чтобы определять местоположение электронного мобильного устройства.
Уровень техники
Существующие технологии определения местоположения, основанные на GPS (глобальной системе местоопределения), используют сеть спутников на земной орбите, которые передают сигналы в известное время. GPS-приемник на поверхности земли измеряет время прибытия сигналов от каждого спутника в небе, который он может «видеть». Время прибытия сигнала вместе с точным местоположением спутников и точным временем, в которое сигнал был передан с каждого спутника, используются, чтобы осуществлять триангуляцию положения GPS-приемника. GPS-приемник требует четырех спутников, чтобы производить триангуляцию, и рабочие характеристики результирующего определения местоположения возрастают в то время как возрастает количество спутников, которые могут быть обнаружены.
Одна из проблем с основанным на GPS установлением условий определения местоположения возникает, когда только три (или меньше) спутников могут быть найдены, и в таком случае (и при отсутствии другой вспомогательной информации) невозможно точно определить место GPS-приемника. Например, если обзор неба GPS-приемника прегражден (например, глубоко внутри конкретного здания), может быть невозможным получать достаточно GPS-измерений, чтобы определить положение приемника.
Для беспроводного связного радиоприемника (то есть мобильной станции) существующая беспроводная сеть базовых станций может быть использована в целях определения местоположения образом, до некоторой степени подобным сети GPS-спутников для GPS-приемника. Рассуждая теоретически, точное местоположение каждой базовой станции, точный момент времени, в который базовая станция осуществляет передачу, и время прибытия сигнала базовой станции на мобильную станцию (например, сотовый телефон) могут быть использованы, чтобы осуществлять триангуляцию положения мобильной станции. Эта технология указывается ссылкой как усовершенствованная трилатерация прямой линии связи (AFLT).
Способ AFLT сам по себе может быть использован в целях определения местоположения; в качестве альтернативы, для того чтобы улучшить рабочие характеристики GPS-системы, существующая сеть беспроводных базовых станций может быть рассмотрена в качестве вторичной сети «спутников» для целей определения местоположения в GPS-совместимой мобильной станции (то есть устройстве, которое включает в себя как GPS-, так и беспроводной связные радиоприемники). Технология AFLT, скомбинированная с GPS-алгоритмами, указывается ссылкой как гибридная, или усиленная GPS (A-GPS).
AFLT является способом для определения положения мобильной станции с использованием большого количества базовых станций сети беспроводной связи, каждая из которых испускает уникальный пилот-сигнал (контрольный сигнал). Способ AFLT включает в себя привлечение большого количества информационных измерений контрольных сигналов от каждой из большого количества базовых станций, в том числе привлечение измерений контрольных сигналов, представленных в текущем варианте осуществления в наборах контрольных сигналов мобильной станции - активных, кандидатов и соседей. Каждое из информационных измерений включает в себя оценку наиболее раннего времени прибытия для каждого контрольного сигнала. В некоторых вариантах осуществления информационные измерения дополнительно включают в себя оценку RMSE (среднеквадратической ошибки), момент времени измерения для каждого времени прибытия и энергетическое измерение (например, Ec/Io (отношения энергии несущей к уровню помехи)) для всех разрешимых путей распространения контрольного сигнала.
Информационные измерения, полученные AFLT-алгоритмом, могут быть использованы в одиночку, чтобы определять положение мобильной станции; в качестве альтернативы, одно или более типичных AFLT-измерений могут быть использованы совместно с типичными GPS-измерениями, чтобы определять положение мобильной станции. В некоторых вариантах осуществления мобильная станция содержит сотовый телефон, а способ дополнительно содержит осуществление беспроводного соединения сотового телефона с одной из сотовых базовых станций до получения данных; базовая станция предоставляет перечень поиска сот сотовому телефону обо всех базовых станциях в зоне, из которых могут быть получены информационные измерения. В вариантах осуществления, которые включают в себя систему GPS, базовая станция также может предоставлять перечень поиска GPS, который может быть использован, чтобы уменьшить время, необходимое мобильной станции, чтобы выполнить GPS-поиск и, таким образом, уменьшать время местоопределения. На практике доказано, что AFLT (в том числе A-GPS) является лишь ограниченно успешными касательно целей определения местоположения, отчасти потому, что ретрансляторы, применяемые в беспроводных сетях, являются причиной неопределенности в отношении точки передачи контрольного сигнала. Другими словами, мобильная станция в настоящее время не может различать, был ли принятый сигнал передан с донорной приемопередающей базовой станции (BTS) или ретранслятора. Поскольку точка передачи контрольного сигнала неизвестна (например, непосредственно с донорной BTS или через ретранслятор), AFLT-измерение не может быть использовано, чтобы точно определять положение. В дополнение, ретранслятор также будет обладать внутренними задержками, типично в диапазоне от сотен наносекунд до десятков микросекунд, потенциально имея в результате ошибку определения местоположения в диапазоне от примерно 24,4 метра (для 100 наносекунд) до примерно 2,44 километра (для 10 микросекунд).
В одном из традиционных вариантов осуществления решение в отношении проблемы ретранслятора заключается в том, чтобы исключать все AFLT-измерения в зонах, где присутствуют ретрансляторы. Однако это решение полностью устраняет AFLT-определение местоположения и любую часть A-GPS от того, чтобы быть использованными во многих местоположениях, таким образом, уменьшая возможность использования и отдачу определения местоположения и увеличивая интервалы GPS-поиска, имея результатом более длительное время местоопределения.
Было предложено ввести сигнатуру в обратной линии связи (RL), как описано в патенте США № 6501955, для того чтобы способствовать определению положения. К сожалению RL-сигнатура предполагает быть только ограниченным содействием в уменьшении влияния ретрансляторов на определение местоположения, поскольку мобильная станция использует для определения местоположения AFLT-измерения из прямой линии связи. Так как отсутствует гарантия того, что прямая линия связи, обратная по отношению к мобильной станции, будет следовать тем же путем, что и обратная линия связи от мобильной станции (то есть через тот же ретранслятор), ожидается, что сигнатура обратной линии связи будет субоптимальной для идентификации информации о ретрансляторе, в целях определения местоположения. Введение сигнатуры в FL-сигнал (прямой линии связи) было предложено так, как описано в патенте США № 6501955, однако еще не было разработано никакого практического решения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Раскрыты система и способ скрытой частотной маркировки ретранслятора прямой линии связи (FLRFWM), которые делают возможным установление условий определения местоположения в зонах, где присутствуют ретрансляторы, посредством скрытой маркировки ретранслированных сигналов информацией о ретрансляторе. FLRFWM-система включает в себя ретранслятор, который скрыто маркирует сигнал прямой линии связи колебательным сигналом быстрой (высокоскоростной) частотной модуляции, в то время как он проходит через ретранслятор, и мобильную станцию, которая обнаруживает и идентифицирует колебательный сигнал быстрой частотной модуляции. Быстрая частотная скрытая маркировка включает в себя информацию о ретрансляторе, которая может быть использована, чтобы определить положение мобильной станции в зоне, где присутствуют ретрансляторы, с использованием AFLT и/или A-GPS систем определения местоположения. Информация о ретрансляторе может просто указывать, что сигнал ретранслирован, или может уникально идентифицировать ретранслятор, через который проходил FL-сигнал. Скрытая маркировка введена в прямую линию связи, с тем чтобы каждое AFLT-измерение могло быть сортировано по ретрансляторам и, в соответствии с этим, использовано для определения местоположения. Быстрое частотное скрытое маркирование прямой линии связи достигает минимального влияния на рабочие характеристики FL, AFLT и GPS, хороших вероятностей обнаружения, идентификации и ложно найденной неисправности, короткого времени на обнаружение/идентификацию, хорошей чувствительности обнаружения/идентификации.
Раскрыт ретранслятор, который включает в себя усилитель для усиления сигнала прямой линии связи с базовой станции на мобильную станцию и быстрый частотный модулятор, который частотно модулирует сигнал прямой линии связи идентификацией быстрой частотной скрытой маркировки, в то время как он проходит через ретранслятор. Быстрая частотная скрытая маркировка имеет такую частоту, что частотный следящий контур на мобильной станции по существу не обнаруживает скрытую маркировку, для того чтобы минимизировать неблагоприятное влияние на рабочие характеристики AFLT и GPS. Кроме того, быстрая частотная скрытая маркировка имеет амплитуду, приспособленную минимизировать нежелательное воздействие на рабочие характеристики FL.
В некоторых вариантах осуществления скрытая маркировка определена колебательным сигналом модуляции, таким, который по существу является периодическим, с периодом 2Т. Полупериод Т колебательного сигнала по существу является меньшим, чем постоянная времени частотного следящего контура мобильной станции, например меньшим, чем примерно 1/60 постоянной времени частотного следящего контура, с тем чтобы частотный следящий контур на мобильной станции по существу не обнаруживал скрытую маркировку. В некоторых вариантах осуществления периодический колебательный сигнал может быть прямоугольным колебательным сигналом с амплитудой, меньшей или равной примерно 50 Гц. В некоторых вариантах осуществления периодический колебательный сигнал уникально идентифицирует ретранслятор посредством обладания уникальным значением Т, таким образом, предусматривая идентификацию ретранслятора на мобильном устройстве. В других вариантах осуществления все ретрансляторы будут обладать периодическим колебательным сигналом с одним и тем же значением Т, таким образом, предусматривая только обнаружение ретранслятора на мобильном устройстве.
В некоторых вариантах осуществления скрытая маркировка определена посредством колебательного сигнала модуляции, который является непериодическим, например BPSK- (с двоичной фазовой манипуляцией), QPSK- (с фазовой манипуляцией с четвертичными сигналами), или OQPSK- (с квадратурной фазовой манипуляцией со сдвигом) кодированным колебательным сигналом с длительностью бита в 2Т. Длительность Т полубита колебательного сигнала в этих вариантах осуществления по существу является меньшей, чем постоянная времени частотного следящего контура мобильной станции, с тем чтобы частотный следящий контур на мобильной станции по существу не обнаруживал скрытую маркировку. В некоторых вариантах осуществления непериодический колебательный сигнал имеет амплитуду, меньшую или равную приблизительно 50 Гц. В некоторых вариантах осуществления непериодический колебательный сигнал уникально идентифицирует ретранслятор посредством обладания уникальной последовательностью бит, таким образом, предусматривая идентификацию ретранслятора на мобильном устройстве. В других вариантах осуществления, все ретрансляторы будут обладать одним и тем же колебательным сигналом с одной и той же последовательностью бит, таким образом, предусматривая только обнаружение ретранслятора на мобильном устройстве.
Раскрыта мобильная станция, которая принимает большое количество пилот-сигналов прямой линии связи и идентифицирует наличие колебательного сигнала быстрой частотной скрытой маркировки, чтобы определить, ретранслированы ли какие-либо из сигналов прямой линии связи. Мобильная станция включает в себя приемник для приема сигналов прямой линии связи, частотный следящий контур для предоставления возможности точной демодуляции FL-сигналов и AFLT-искатель. AFLT-искатель обнаруживает пилот-сигналы и выполняет фазовые измерения пилот-сигнала, в том числе измеряя время прибытия большого количества пилот-сигналов прямой линии связи. Мобильная станция также включает в себя систему идентификации ретранслятора, сконфигурированную, чтобы обнаруживать и/или идентифицировать скрытую маркировку в FL-сигнале, если она имеет место. Система идентификации ретранслятора обнаруживает ретранслятор по FL-сигналу посредством отыскивания в сигнале прямой линии связи наличия колебательного сигнала скрытой маркировки. Система идентификации ретранслятора идентифицирует ретранслятор по сигналу прямой линии связи посредством отыскивания в сигнале прямой линии связи наличия колебательного сигнала скрытой маркировки, извлечения колебательного сигнала скрытой маркировки, если присутствует, и осведомления о свойстве колебательного сигнала скрытой маркировки, которое уникально идентифицирует ретранслятор. Частотный следящий контур по существу не обнаруживает колебательный сигнал скрытой маркировки, вследствие его быстрой частоты.
Также раскрыт способ для установления информации определения местоположения мобильной станции. Способ включает в себя установление информации определения местоположения по прямой линии связи большого количества пилот-сигналов в зоне, где могут присутствовать ретрансляторы. Способ начинается выполнением AFLT-поиска в мобильной станции, чтобы обнаруживать пилот-сигналы и измерять наиболее раннее время прибытия большого количества пилот-сигналов. Мобильная станция затем выбирает первый пилот-сигнал, захваченный во время AFLT-поиска, и сортирует по ретрансляторам пилот-сигнал посредством выполнения AFLT-поиска ретранслятора по первому пилот-сигналу, в том числе отыскивания быстрой частотной скрытой маркировки, которая идентифицирует ретранслированный сигнал. Частота колебательного сигнала скрытой маркировки такова, что частотный следящий контур в мобильной станции по существу не обнаруживает скрытую маркировку на мобильной станции. Способ продолжается повторением этапов выбора и сортировки по ретрансляторам для большого количества других выбранных пилот-сигналов до тех пор, пока не получено количество отсортированных по ретрансляторам пилот-сигналов, достаточное, чтобы обусловить определение местоположения мобильной станции. В заключение, фазовые измерения пилот-сигнала и информация о ретрансляторе для пилот-сигналов, полученные при AFLT-поиске, предоставляются либо системе определения положения мобильной станции, либо сетевому объекту определения положения, чтобы определить положение мобильной станции.
Информация о ретрансляторе, полученная во время поиска ретранслятора, может в минимуме содержать в себе информацию относительно того, успешно ли был пилот-сигнал сортирован по ретрансляторам или нет, и когда это выполнено, был ли пилот-сигнал ретранслирован или нет. В одном из вариантов осуществления, информация о ретрансляторе содержит в себе только указание того, успешно или нет пилот-сигнал был сортирован по ретрансляторам, и если да, был или нет сигнал ретранслирован, с тем чтобы система определения положения мобильной станции или сетевой объект определения положения могли определить положение мобильной станции посредством исключения измерений по ретранслированным пилот-сигналам и любым пилот-сигналам, которые не были успешно сортированы по ретрансляторам.
В еще одном варианте осуществления AFLT-поиск ретранслятора идентифицирует идентификатор (ID) ретранслятора по колебательному сигналу скрытой маркировки, если таковая присутствует. В этом варианте осуществления информация о ретрансляторе, полученная во время поиска ретранслятора и предоставленная системе определения положения мобильной станции или сетевому объекту определения положения, также включает в себя идентификатор ретранслятора для каждого пилот-сигнала, идентифицированного в качестве транслированного, который предоставляет возможность использования измерений транслированного сигнала в вычислении местоположения.
В некоторых вариантах осуществления, в которых A-GPS используется, чтобы устанавливать условия определения местоположения, GPS-поиск выполняется перед выполнением AFLT-поиска ретранслятора. Если достаточно GPS-измерений получено для установления условий определения местоположения, AFLT-поиск ретранслятора может быть пропущен в интересах уменьшения времени местоопределения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания этого изобретения далее будет сделано обращение к последующему подробному описанию вариантов осуществления, которые проиллюстрированы на сопутствующих чертежах, на которых:
Фиг. 1 - вид в перспективе большого количества базовых станций сети беспроводной связи, здания, содержащего размещенный на нем ретранслятор, спутников GPS и пользователя, удерживающего мобильную станцию;
Фиг. 2 - иллюстрация примерной сотовой структуры зоны покрытия базовой станции;
Фиг. 3 - структурная схема системы частотного маркирования ретранслятора прямой линии связи (FLRFWM), включающей в себя базовую приемопередающую станцию (BTS), ретранслятор и мобильную станцию (MS);
Фиг. 4 - диаграмма, которая показывает один из примеров колебательного сигнала F(t) модуляции, примененного частотным модулятором (фиг. 3), чтобы скрыто маркировать FL-сигнал;
Фиг. 5 - диаграмма, которая показывает еще один пример колебательного сигнала F(t) модуляции, который содержит колебательный BPSK-сигнал;
Фиг. 6 - структурная схема одного из вариантов осуществления мобильной станции, объединяющей в себе возможности беспроводной связи и определения местоположения и включающей в себя систему идентификации ретранслятора;
Фиг. 7 - блок-схема алгоритма, которая иллюстрирует поиск идентификации ретранслятора, выполняемый по одному контрольному сигналу (пилот-сигналу);
Фиг. 8 - структурная схема, которая иллюстрирует поиск идентификации ретранслятора, используемый, чтобы определять идентификатор ретранслятора по контрольному FL-сигналу в одном из вариантов осуществления;
Фиг. 9 - блок-схема алгоритма, которая иллюстрирует AFLT-поиск ретранслятора, выполняемый по многочисленным контрольным FL-сигналам в одном из вариантов осуществления;
Фиг. 10 - блок-схема алгоритма, которая иллюстрирует AFLT-поиск ретранслятора, выполняемый по многочисленным контрольным FL-сигналам в еще одном варианте осуществления, оптимизированном по минимальному времени на идентификацию; и
Фиг. 11 - блок-схема алгоритма одного из примерных способов определения положения мобильной станции с использованием AFLT- или A-GPS-системы в сотовых зонах покрытия, в которых присутствуют ретрансляторы.
ПОДРОБНОЕ ОПИСАНИЕ
Это изобретение описано в последующем описании со ссылкой на чертежи, на которых одинаковыми номерами представлены одни и те же или подобные элементы.
Словарь терминов и сокращений
Последующие термины и сокращения использованы на всем протяжении подробного описания:
(соседей)
Таблица переменных
Среда
Фиг. 1 - вид в перспективе большого количества базовых приемопередающих станций 10 сети беспроводной связи, здания 14, содержащего размещенный на нем ретранслятор 16, GPS-спутников 18 и пользователя 20, удерживающего мобильную станцию 22.
BTS 10 содержат любой набор базовых станций, используемый в качестве части сети беспроводной связи для связи с мобильной станцией. BTS типично предоставляют услуги связи, которые предоставляют мобильной станции, такой как беспроводный телефон, возможность связываться с другими телефонами через сеть 12 беспроводной связи; однако BTS также могли бы быть использованы другими устройствами и/или для других целей беспроводной связи, таких как Интернет-соединение с «карманными» цифровыми вспомогательными устройствами (PDA).
В одном из вариантов осуществления BTS 10 являются частью сети беспроводной CDMA-связи; однако в других вариантах осуществления могут быть использованы другие типы сетей беспроводной связи, такие как сети GSM. В этом варианте осуществления каждая из BTS периодически испускает псевдослучайную последовательность, которая уникально идентифицирует BTS. Псевдослучайная последовательность является последовательностью бит, которая полезна приемнику, чтобы осуществлять захват. В терминологии CDMA эта псевдослучайная последовательность обозначена термином «контрольный сигнал»; в качестве используемого в материалах настоящей заявки термин контрольный сигнал может применяться к любой системе беспроводной связи, а также к CDMA-системам.
Ретранслятор 16 в его основном виде содержит усилитель и принимает и передает усиленные контрольные сигналы между BTS и мобильной станцией. Ретрансляторы стратегически могут быть расположены по всей сотовой сети, в которой, в ином случае, встречаются мертвые зоны, интерференция и неудовлетворительное обслуживание, чтобы улучшать отношения сигнал-шум посредством усиления контрольных сигналов с BTS-станций на дополнительные зоны покрытия.
GPS-спутники 18 содержат любые классы спутников, используемых для установления определения местоположения GPS-приемника. Спутники непрерывно посылают радиосигналы, которые GPS-приемник может обнаруживать, а GPS-приемник измеряет количество времени, которое отнимается на то, чтобы радиосигнал покрыл расстояние от спутника до приемника, посредством коррелирования (сопоставления) локальной копии C/A-кода GPS-спутника и сдвига ее во времени до тех пор, пока она не достигнет корреляции с принятым C/A-кодом спутника. Поскольку скорость, с которой радиосигналы распространяются, известна, а спутники синхронизированы, чтобы периодически испускать их сигналы каждую миллисекунду, совпадающую с «моментом времени GPS», возможно определять, насколько далеко сигналы распространились, посредством определения того, как долго им пришлось прибывать. В отношении пользователя, расположенного на открытом пространстве, GPS-приемник типично обладает беспрепятственной видимостью спутников; таким образом, когда пользователь на открытом пространстве, измерение времени прибытия GPS-сигнала является простым, поскольку обычно существует прямой «луч обзора» от спутника до приемника. Однако в контексте беспроводной связи пользователь может быть расположен в большом городе со зданиями или другими препятствиями, которые GPS-местоопределение более затруднительным.
Фиг. 2 иллюстрирует примерную сотовую структуру зоны покрытия BTS. В такой примерной структуре большое количество шестиугольных зон 24 покрытия BTS, прилегающих одна к другой в симметрично мозаичной компоновке. BTS 10 расположены соответственно в пределах каждой из зон 24 покрытия BTS и обеспечивают покрытие в пределах зоны, в которой они расположены. Более точно, в целях описания в материалах настоящей заявки, BTS 10a обеспечивает покрытие в пределах зоны 24а, BTS 10b обеспечивает покрытие в пределах зоны покрытия 24b и так далее.
В идеальной сотовой сети связи зоны 24 покрытия сконфигурированы прилегающими друг к другу, чтобы предоставлять неразрывное сотовое покрытие мобильной станции, в то время как она перемещается через разные зоны покрытия. Однако большинство сотовых сетей имеют мертвые зоны, интерференцию и другие препятствия, которые являются причиной проблем с сотовым покрытием. Например, окружающая среда, подобная туннелям, гаражам и спортивным стадионам, создает проблемы для сотовых услуг. В качестве других примеров покрытие протяженного шоссе и сельских районов может быть очень дорогостоящим для поддержки BTS-станциями. Соответственно, один или более ретрансляторов 16 могут быть размещены в пределах зоны покрытия, для того чтобы улучшать или расширять покрытие BTS при много меньшей стоимости, чем с установкой еще одной BTS.
В одном из вариантов осуществления ретрансляторы 16 содержат антенны и приемопередатчики, которые отправляют и принимают сигналы на и с мобильных станций и BTS-станций, таких как будут описаны более подробно со ссылкой на фиг. 3. В одном из простых примеров ретранслятор усиливает принимаемые сигналы и повторно передает их на той же частоте.
На фиг. 2 пользователь 20, удерживающий мобильную станцию 22, размещен в пределах первой зоны 24а покрытия. Мобильная станция 22 может быть неспособной принимать достаточно сильный контрольный сигнал от первой BTS 10а из-за интерференции от препятствия, такого как большое здание (не показано). Кроме того, мобильная станция 22 может быть неспособной принимать достаточно сильный контрольный сигнал непосредственно от второй BTS 10b из-за относительно дальнего расстояния. Однако ретранслятор 16b размещен надлежащим образом в пределах зоны 24b покрытия, с тем чтобы местоположение мобильной станции 22, которая могла бы в других обстоятельствах испытывать перерыв в обслуживании, могло быть в достаточной мере покрыто. Другими словами, когда контрольный сигнал передается со второй BTS 10b, он будет усилен посредством ретранслятора 16b и принят на мобильной станции 22.
Мобильная станция 22 обладает возможностями определения местоположения так, как описано выше, в том числе AFLT, и поэтому может использовать не только контрольные сигналы, в настоящий момент предназначенные мобильной станции (то есть набор активных), но также может использовать сигналы за пределами набора активных в целях определения положения мобильной станции. Например, в одном из вариантов осуществления, мобильная станция отыскивает контрольные сигналы, присутствующие в перечне 29 соседей, который является перечнем контрольных сигналов, которые могли бы быть пригодными для приема мобильной станцией. Перечень соседей может быть поставлен, например, с базовой станции.
Может быть отмечено, что определенные контрольные сигналы в перечне соседей могут быть отобраны для набора 28 кандидатов (то есть контрольных сигналов, которые могут наблюдаться мобильной станцией, чья мощность, когда измерялась мобильной станцией, превышает заданное пороговое значение «по эфиру») или набора 27 активных (то есть контрольных сигналов, ассоциируемых с каналами прямого потока обмена, в текущий момент назначенных мобильной станции, которые являются самыми мощными контрольными сигналами, принятыми мобильной станцией от локальных базовых станций, и типично являются сигналами многолучевого распространения одного и того же контрольного сигнала) согласно текущим CDMA-стандартам.
Для того чтобы использовать AFLT-измерения при установлении условий определения местоположения мобильной станции 22, контрольные сигналы (в любом из наборов: активных, кандидатов или соседей) должны быть успешно рассортированы по ретрансляторам, и если ретранслированы, мобильная стация должна определить, из какого именно ретранслятора сигнал приходил; кроме того, местоположение и внутренние задержки ретрансляторов также должны быть известны и доступны, для того чтобы использовать ретранслированные AFLT-измерения при расчете определения местоположения.
Как предварительно описано в материалах настоящей заявки, традиционные системы AFLT- и A-GPS-местоопределения в пределах мобильной станции не обнаруживают и/или не идентифицируют ретранслированный сигнал, который делает фазовые измерения контрольного сигнала для определения положения по существу бесполезными в зоне, имеющей ретрансляторное покрытие. Чтобы обойти эту проблему, в настоящей заявке раскрыты ретранслятор, который способен уникально скрыто маркировать сигнал прямой линии связи, и мобильная станция, которая способна обнаруживать и идентифицировать скрыто маркированный ретранслированный сигнал. Поскольку мобильная станция способна обнаруживать и идентифицировать, ретранслирован или нет сигнал и, если ретранслирован, из какого именно ретранслятора сигнал приходил, точная информация о положении может быть определена с использованием любого из сигналов: активных, кандидатов и соседей, принятых мобильной станцией. В дополнение, в материалах настоящей заявки раскрыты ретранслятор, который способен (уникально или неуникально) скрыто маркировать сигнал прямой линии связи, и мобильная станция, которая способна только обнаруживать скрыто маркированные ретранслированные сигналы. В этом варианте осуществления, поскольку мобильная станция способна только обнаруживать, ретранслирован или нет сигнал, все ретранслированные контрольные сигналы (и контрольные сигналы, которые не были успешно отсортированы по ретрансляторам) должны быть исключены из установления условий определения местоположения.
Описание
Система скрытого частотного маркирования ретранслятора прямой линии связи (FLRFWM)
Фиг. 3 - структурная схема системы связи, которая реализует FLRFWM-систему. Система связи включает в себя базовую приемопередающую станцию (BTS) 10, ретранслятор 16 и мобильную станцию (MS) 22. BTS 10 содержит антенну 30 для передачи с нее контрольного сигнала 31 прямой линии связи. Ретранслятор 16 содержит первую антенну 32 для приема сигнала 31 прямой линии связи от BTS 10, усилитель 33 для усиления сигнала, быстрый (высокоскоростной) частотный модулятор 34 для скрытого маркирования FL-сигнала и вторую антенну 36 для передачи скрыто маркированного сигнала 37 прямой линии связи на MS 22. MS содержит антенну 38 для приема скрыто маркированного сигнала 37 прямой линии связи с ретранслятора и частотный следящий контур 39, чтобы предоставить возможность точной демодуляции FL-сигнала 37.
BTS 10 может содержать любую подходящую базовую станцию для беспроводной связи. В одном из вариантов осуществления BTS сконфигурирована для CDMA-сети; однако в других вариантах осуществления BTS может быть реализована для других сетей беспроводной связи, таких как TDMA (с множественным доступом и временным разделением каналов) и GSM. Несмотря на то что показана только одна антенна 30 для передачи сигналов, должно быть понятно, что BTS обладает типичной конфигурацией BTS, включающей в себя один или более приемопередатчиков и антенн для передачи и приема сигналов.
Ретранслятор 16 содержит любой подходящий ретранслятор, который имеет усилитель 33 для усиления сигналов в канале связи; то есть ретранслятор 16 содержит любую подходящую конфигурацию, которая принимает, усиливает и повторно передает сигналы дистанционной связи на и с BTS 10 и MS 22. Дополнительно, ретранслятор содержит частотный модулятор 34, который скрыто маркирует сигнал 31 прямой линии связи быстрой частотной модуляцией, как будет обсуждено более подробно со ссылкой на фиг. 4 или фиг. 5 для примера.
В одном из вариантов осуществления ретранслятор 16 содержит первую и вторую антенны 32, 36. Первая антенна 32 используется, чтобы принимать сигнал 31 прямой линии связи, а вторая антенна 36 используется, чтобы повторно передавать сигнал 37 прямой линии связи за пределы ретранслятора. Может быть отмечено, что, хотя ретранслятор на фиг. 3 демонстрирует только усилитель и частотный модулятор, должно быть понятно, что ретранслятор 16 обладает любой подходящей конфигурацией; например, ретранслятор также может содержать приемопередатчики (передатчики/приемники), которые функционируют, чтобы принимать и повторно передавать сигналы в и за пределы ретранслятора 16 через антенны 32, 36.
Может быть отмечено, что ретранслятор может содержать альтернативные конфигурации; например, ретранслятор может быть подключен к BTS через проводное соединение. Один из таких примеров включает в себя оптический ретранслятор, который принимает оптический сигнал (например, оптико-волоконный), усиливает его (и/или восстанавливает форму, восстанавливает синхронизацию, сдвигает по частоте и воспроизводит его иным образом) и повторно передает его беспроводным образом (на той же или другой частоте).
Ретранслятор 16 включает в себя быстрый частотный модулятор 34, который частотно модулирует сигнал 31 прямой линии связи быстрой частотной скрытой маркировкой, такой как описанная более подробно со ссылкой на фиг. 4 или фиг. 5 для примера. Быстрая частотная скрытая маркировка идентифицирует сигнал прямой линии связи как ретранслированный сигнал и может устанавливать уникальный идентификатор ретранслятора, который указывает, через какой ретранслятор сигнал проходил. Посредством скрытого маркирования ретранслированного сигнала прямой линии связи, может быть определено, какие именно контрольные сигналы ретранслированы, а посредством уникального скрытого маркирования ретранслированного прямого сигнала в дополнение может быть определено по этим ретранслированным сигналам, какой конкретный ретранслятор ретранслировал контрольный сигнал. С использованием этой информации информация точного определения местоположения может быть получена с использованием AFLT или другой подобной технологии определения местоположения.
По прежнему ссылаясь на фиг. 3, мобильная станция 22 содержит антенну 38 для приема сигналов дистанционной связи с BTS-станций и ретрансляторов, в том числе скрыто маркированный сигнал 37 прямой линии связи с ретранслятора 16. Как будет описано более подробно со ссылкой на фиг. 7 и фиг. 8, MS 22 может обнаруживать быструю частотную скрытую маркировку в FL-сигнале, если таковая имеет место, различать, с ретранслятора ли приходил сигнал, а в некоторых вариантах осуществления идентифицировать, какой конкретный ретранслятор передавал сигнал, таким образом, предоставляя возможность точным AFLT-измерениям быть успешно выполненными и предоставляя им возможность быть использованными при расчете определения местоположения, как будет описано в другом месте в материалах настоящей заявки. Также должно быть отмечено, что частотный следящий контур 39 мог бы не быть способным обнаруживать быструю частотную скрытую маркировку, такую как будет описана более подробно со ссылкой на фиг. 4 и 6.
Схема модуляции скрытого частотного маркирования ретранслятора
Далее сделана ссылка на фиг. 4 и 5, которые иллюстрируют два примерных колебательных сигнала быстрой частотной модуляции, которые могут быть использованы, чтобы скрыто маркировать FL-сигнал. Фиг. 4 иллюстрирует периодический колебательный сигнал прямоугольной формы, используемый, чтобы частотно модулировать FL-сигнал, при этом идентификатор ретранслятора, уникальный для каждого ретранслятора, идентифицируется частотой (то есть выбором полупериода Т) колебательного сигнала модуляции таким, как будет описан в материалах настоящей заявки. Фиг. 5 иллюстрирует непериодический колебательный сигнал, используемый, чтобы частотно модулировать FL-сигнал, при этом идентификатор ретранслятора, уникальный для каждого ретранслятора, закодирован в колебательном сигнале модуляции с использованием двоичной фазовой манипуляции (BPSK). Должно быть отмечено, что многообразие разных колебательных сигналов модуляции могут быть частотно модулированы в FL-сигнале, для того чтобы скрыто маркировать FL-сигнал. Например, могут быть использованы периодические колебательные сигналы, такие как колебательные сигналы синусоидального и треугольного вида, и непериодические колебательные сигналы, такие как QPSK и OQPSK.
В некоторых вариантах осуществления, где требуется только обнаружение ретранслированного сигнала, мобильная станция может обнаруживать просто, ретранслирован или нет сигнал, без идентификации ретранслятора, через который сигнал проходил. В этом случае, так как наличие колебательного сигнала модуляции просто указывает, что контрольный сигнал ретранслирован, и не нужна никакая дополнительная информация, всем ретрансляторам может быть назначен один и тот же идентификатор и, таким образом, применен один и тот же колебательный сигнал модуляции ко всем ретранслированным FL-сигналам. Однако в других вариантах осуществления, где требуются и обнаружение, и идентификация ретранслированного сигнала, колебательный сигнал модуляции включает в себя идентификатор ретранслятора, уникальный для каждого ретранслятора, с тем чтобы мобильная станция могла быть способна не только обнаруживать присутствие колебательного сигнала модуляции, но также и идентифицировать ретранслятор, через который контрольный сигнал проходил, по колебательному сигналу модуляции.
Фиг. 4 показывает один из примеров колебательного сигнала 40 модуляции, который может быть модулирован в FL-сигнале, в то время как он проходит через ретранслятор, чтобы скрыто маркировать сигнал, в одном из вариантов осуществления. В этом варианте осуществления частота колебательного сигнала модуляции является уникальным идентификатором ретранслятора, который ретранслировал FL-сигнал; то есть полупериод Т колебательного сигнала представляет ретрансляторный идентификатор ретранслятора, через который проходил FL-сигнал. В этом варианте осуществления колебательный сигнал модуляции содержит периодический сигнал 40 прямоугольной формы с амплитудой fA и периодом 44 в 2Т. Переменные fA (амплитуда колебательного сигнала частотной модуляции) и Т (полупериод колебательного сигнала) 42 могли бы быть выбраны, чтобы минимизировать неблагоприятные воздействия на рабочие характеристики FL, AFLT и GPS, наряду с доведением до максимума вероятностей обнаружения и идентификации, как будет описано в другом месте более подробно.
Для того чтобы осуществить скрытую маркировку в n бит (где n представляет количество бит, используемых для идентификатора ретранслятора) в контрольном сигнале, N=2n колебательных сигналов могут быть определены, каждый с периодом 2[TMIN:inc:TMAX]TC секунд, где TMIN - самый короткий, а TMAX - самый длинный период в элементарных CDMA-сигналах, N - количество различных идентификаторов ретранслятора, которые могут быть модулированы в этом примерном варианте осуществления, а inc выбран, чтобы создавать одинаковый частотный интервал между N скрытыми маркировками.
Дополнительно, полупериод Т 42 мог бы быть выбран так, чтобы самая медленная скрытая маркировка (то есть скрытая маркировка с максимальным Т (ТMAX)) была достаточно быстрой, чтобы по существу избежать обнаружения частотным следящим контуром (FTL) (показанным на фиг. 3 в 39), в MS. Иначе, если бы FTL был способен обнаруживать частотную скрытую маркировку на MS, это могло бы явиться причиной того, что TRK_LO_ADJ (сигнал, который управляет управляемым напряжением, температурно-компенсированным генератором на кварцевом резонаторе VCTCXO в мобильной станции, из которого могут быть выработаны все сигналы тактирования и опорные частоты мобильного устройства) был бы испорчен амплитудой тока частотной скрытой маркировки (fA или -fA). В сетевой CDMA-системе это могло бы иметь результатом нежелательное Доплеровское смещение CDMA-кода, которое могло бы неблагоприятно повлиять на точность AFLT-измерений, поскольку обычно отсутствует отслеживание времени, реализуемое при AFLT-поиске; подобная проблема также может происходить, в результате, при реализации в других системах беспроводной связи. Кроме того, в A-GPS-системах частотные следящие контуры отключены во время GPS-обработки, поскольку мобильное устройство неизменно находится в режиме обнаружения и TRK_LO_ADJ зафиксирован в своем последнем CDMA-значении, которое могло бы быть обратной величиной амплитуды скрытой маркировки в момент фиксации. Эта ошибка преобразуется в GPS-ошибку Доплеровского смещения при GPS-измерениях псевдодальности, потенциально уменьшая выход годных GPS-измерений псевдодальности и точность результирующего определения местоположения.
В некоторых реализациях может быть полезно выбирать колебательный сигнал с амплитудой fA до приблизительно 50 Гц, для того чтобы минимизировать ухудшение рабочих характеристик FL (например, в среднем, меньше чем на 0,2 дБ), максимизировать вероятности обнаружения и идентификации ретранслятора и минимизировать время на идентификацию. В одной из примерных реализаций колебательного сигнала по фиг. 4, в котором быстрая частотная модуляция реализована в сетевой CDMA-системе, обнаруживаются хорошие результаты, когда fA - приблизительно 50 Гц, а Т - приблизительно [10×64:inc:11×64] диапазонов элементарных CDMA-сигналов, где длительность элементарного CDMA-сигнала TC - 1/1.2288e6 секунд, а inc выбрано, чтобы достичь одинакового расстояния по частоте для более легкого обнаружения. Результирующее значение затем усекается до ближайшего тактового импульса элементарного сигнала × 8. Например, результирующие частоты колебательного сигнала скрытой маркировки могли бы быть в диапазоне [872,72:960] Гц с одинаковым интервалом (около 2,815 Гц). Эти результаты будут описаны более подробно в разделе «Пример», который обсуждает, как переменные (например, fA и T) могут быть оптимизированы, чтобы обеспечить минимальное влияние на рабочие характеристики CDMA, AFLT и GPS на FL, максимальную вероятность обнаружения и идентификации и минимальное время на идентификацию.
Быстрая частотная модуляция в варианте осуществления по фиг. 4 отчасти преимущественна, поскольку она не требует символьной временной синхронизации. Другими словами, поскольку ретранслятор уникально идентифицирован частотой периодического колебательного сигнала модуляции (то есть полупериодом Т), вместо конкретного (n-битного) символьного кода, нет необходимости обеспечивать синхронизацию на ретрансляторе, от которого бы в ином случае потребовалось точно синхронизировать начало (и окончание) непериодического колебательного сигнала модуляции (например, закодированного n-битного символьного кода). К тому же, из-за неотъемлемых характеристик периодического колебательного сигнала модуляции в этом варианте осуществления, в частности идентификатора ретранслятора, являющегося закодированным в частоте колебательного сигнала модуляции, эта скрытая маркировка чрезвычайно невосприимчива к замиранию по сравнению к другим схемам основанной на модуляции скрытой маркировки.
Далее сделана ссылка на фиг. 5, которая иллюстрирует еще один пример колебательного сигнала 50 модуляции, используемого, чтобы скрыто маркировать FL. Более точно, фиг. 5 иллюстрирует использование двоичной фазовой манипуляции (BPSK), чтобы быстро частотно модулировать n-битный идентификатор ретранслятора в FL-сигнале. В этом варианте осуществления каждая длительность 54 бита определена двумя полупериодами Т. Нуль ('0') 56 вырабатывается посредством модуляции контрольного сигнала на полупериод Т с fA, сопровождаемой модуляцией сигнала с -fA на полупериод Т. Единица ('1') 58 вырабатывается посредством модуляции FL-сигнала с -fA, а затем с fA на две следующие друг за другом продолжительности времени Т. Эта скрыто маркирующая модуляция потребует (n-битной) символьной временной синхронизации, и поэтому ретранслятор должен обладать системой для выполнения необходимой синхронизации. Хотя символьная временная синхронизация может добавить сложность и стоимость к реализации быстрой частотной модуляции в ретрансляторе, в некоторых вариантах осуществления общий полезный результат может перевешивать издержки, а схема модуляции может достигать хороших результатов.
Может быть отмечено, что несмотря на то, что здесь даны некоторые примеры реализации в CDMA-системе, быстрая частотная модуляция может быть реализована в разнообразии беспроводных систем связи, таких как TDMA и GSM.
Мобильная станция
Фиг. 6 - структурная схема одного из вариантов осуществления мобильной станции 22, объединяющей в себе основанные на AFLT и GPS возможности определения местоположения и включающей в себя систему идентификации ретранслятора, допускающего обнаружение скрытой маркировки в FL-сигнале (например, если сигнал ретранслирован). Если обнаружен, она может извлекать информацию о ретрансляторе из скрыто маркированного ретранслированного FL-сигнала. Этот вариант осуществления использует и GPS, и/или AFLT, чтобы определять положение, однако в альтернативных вариантах осуществления AFLT может быть использован в одиночку.
На фиг. 6 система 60 беспроводной связи соединена с одной или более антеннами 59. Система 60 беспроводной связи содержит подходящие устройства, аппаратные средства и программное обеспечение для поддерживания связи и/или обнаружения сигналов от беспроводных BTS, в том числе приемник 61 для приема FL-сигналов и частотный следящий контур (FTL) 62, который делает возможной точную демодуляцию FL-сигналов.
В одном из вариантов осуществления система 60 беспроводной связи содержит CDMA-систему связи, пригодную для поддерживания связи с CDMA-сетью беспроводных BTS, однако в других вариантах осуществления системы беспроводной связи могут содержать другой вид сети, такой как TDMA или GSM.
Система 63 управления мобильной станцией связана с системой 60 беспроводной связи и типично включает в себя микропроцессор, который обеспечивает стандартные функции обработки, а также другие системы вычисления и управления. AFLT-искатель 64 связан с системой 60 беспроводной связи и системой 63 управления мобильной станцией. AFLT-искатель обнаруживает контрольные сигналы, выполняет фазовые измерения контрольного сигнала по обнаруженным контрольным сигналам мобильной станции (например, из набора контрольных сигналов - активных, кандидатов и соседей) и поставляет эти измерения в базу 65 данных фазовых измерений (PPM) контрольного сигнала.
База 65 данных фазовых измерений контрольного сигнала, которая связана с системой 63 управления, предусмотрена, чтобы хранить информацию касательно отслеживаемых информационных измерений из AFLT-искателя, например время прибытия, RMSE и Ec/Io. Идентификатор контрольного сигнала уникально идентифицирует каждый контрольный сигнал в базе данных.
Система 66 определения положения, которая может быть по выбору предусмотрена в пределах мобильной станции, соединена с системой 63 управления мобильной станции и базой 65 данных PPM; система 66 определения положения запрашивает информацию и операции в качестве предопределенных из других систем (например, GPS-системы связи, базы данных PPM и системы идентификации ретранслятора) и выполняет вычисления, необходимые для определения положения мобильной станции, используя измерения, полученные любым подходящим APLT-алгоритмом, GPS-алгоритмом или сочетанием APLT и GPS алгоритмов (A-GPS). Для такой цели система 66 определения положения также может содержать базу данных (не показана) местоположений и внутренних задержек всех BTS и ретрансляторов, чьи контрольные сигналы зарегистрированы в перечне активных, кандидатов и соседей.
Может быть отмечено, что система 66 определения положения может функционировать в одиночку, без сетевого объекта определения положения (PDE); то есть MS может определять свое собственное положение без содействия из ресурсов вне MS (автономный режим). В качестве альтернативы система 66 определения положения может функционировать совместно с внешней PDE, находящейся где либо в сети; то есть PDE может содействовать MS в выработке перечня GPS-поиска (например, посредством предоставления мобильной станции GPS-альманаха и эфемеридных измерений), в то время как MS может выполнять вычисление положения (MS-ориентированный режим). Однако в некоторых альтернативных вариантах осуществления система 63 управления мобильной станции может принимать содействие GPS-сопровождения (например, перечень GPS-поиска с интервалами поиска как в коде, так и в частоте) от внешней PDE, и сообщать некоторую или всю информацию измерения положения (например, AFLT- и GPS- измерения, информацию о ретрансляторе и так далее) PDE-объекта за пределами MS, которая вычисляет положение MS и, возможно, отправляет положение обратно на MS через сеть беспроводной связи. PDE может находиться в одной или более внешних системах обработки данных, которые объединены в сеть, чтобы связываться с мобильной станцией. Может быть отмечено, что оказание помощи PDE могло бы быть модифицировано, чтобы включать в себя отправку информации оказания помощи ретранслятора на мобильную станцию, которая доступна обслуживающей базовой станции, такой как все из возможных ретрансляторов в конкретном PN, их идентификаторы ретранслятора и их внутренние задержки (и возможно, их местоположения, если определение местоположения должно быть выполнено на MS). Это может помочь в уменьшении времени идентификации ретранслятора и, таким образом, времени местоопределения.
Интерфейс 67 пользователя включает в себя любые подходящие интерфейсные системы, такие как микрофон/динамик 68, клавишная панель 69 и дисплей 70, которые делают возможным взаимодействие пользователя с MS. Микрофон/динамик 68 предусматривают услуги голосовой связи с использованием системы беспроводной связи. Клавишная панель 69 содержит любые подходящие кнопки для пользовательского ввода. Дисплей 70 содержит любой подходящий дисплей, такой как LCD-дисплей (жидкокристаллический дисплей) с задней подсветкой.
GPS-система 74 связи также связана с системой 63 управления мобильной станции и с одной или более антеннами 61, и содержит любые подходящие аппаратные средства и программное обеспечение для приема и обработки GPS-сигналов.
Мобильная станция 22 дополнительно содержит AFLT-искатель 73 ретранслятора, систему 72 идентификации ретранслятора и, не обязательно, базу 71 данных идентификаторов ретрансляторов, которые совместно делают возможными точные PPM-измерения для установления условий определения местоположения даже в зонах покрытия беспроводной связи, где присутствуют ретрансляторы. По запросу AFLT-искатель 73 ретранслятора запускает AFLT-поиск ретранслятора по некоторым или всем контрольным сигналам активных, кандидатов и соседей, найденных обычным AFLT-искателем 64. Результаты затем отправляются в систему 72 идентификации ретранслятора, которая содержит любые подходящие аппаратные средства, программно-аппаратные средства и/или программное обеспечение, которые запускают поиск идентификации ретранслятора. Поиск идентификации ретранслятора способен обнаруживать ретранслированный сигнал, если он имеет место, и декодировать скрытую маркировку в сигнале, для того чтобы определять, из какого именно ретранслятора приходил FL-сигнал. Типично, поиск идентификации ретранслятора реализуется цифровым образом, таким как будет обсужден со ссылкой на фиг. 8; однако могли бы быть использованы другие реализации способов поиска.
В некоторых вариантах осуществления, база 71 данных идентификаторов ретрансляторов, связанная с системой 72 идентификации ретранслятора, может быть предоставлена по выбору и может удерживать информацию о ретранслированных сигналах в пределах окрестности мобильной станции, в текущий момент допускающих передачу на мобильную станцию, чтобы помочь в обнаружении и определении местоположения. База данных идентификаторов ретрансляторов может быть полезна, чтобы содействовать в идентификации ретранслятора; например, информация в базе данных идентификаторов ретрансляторов может быть отправлена в систему определения положения внутри мобильной станции или сетевому объекту определения положения, внешнему по отношению к MS, для использования ретранслированных контрольных сигналов при определении положения MS. Может быть отмечено, что информация, сохраненная в базе данных ретрансляторов, может быть по выбору размещена внешней по отношению к MS в PDE, такой как описанная со ссылкой на систему 66 определения положения.
Схема обнаружения и идентификации скрытого частотного маркирования ретранслятора
Далее сделана ссылка на фиг. 7, которая является блок-схемой алгоритма поиска идентификации ретранслятора, иллюстрирующая, каким образом поиск идентификации ретранслятора обнаруживает и идентифицирует скрытую маркировку в FL-сигнале, в одном из вариантов осуществления. Как будет описано со ссылкой на фиг. 9 и 10, многочисленные поисковые AFLT-операции будут типично запускаться по многочисленным контрольным сигналам, для того чтобы получать отсортированные по ретрансляторам AFLT-измерения, достаточные для определения местоположения; однако фиг. 7 и 8 будут сосредотачиваться на поиске ретранслятора в качестве примененного к одиночному контрольному FL-сигналу.
На этапе 76 большое количество выборок контрольного сигнала накоплено (например, искателем контрольного сигнала) для одиночного контрольного сигнала, для того чтобы обеспечить требуемый коэффициент расширения спектра для сигнала и повысить SNR, тем самым предоставляя возможность достоверного обнаружения и идентификации ретранслятора на интересующих мощностях контрольных сигналов.
На этапе 77 поиск идентификации ретранслятора обнаруживает быстрый (быстродействующий) частотный колебательный сигнал скрытой маркировки в FL-сигнале, если она имеет место, и, в некоторых вариантах осуществления, определяет идентификатор ретранслятора по скрытой маркировке. Один из примеров описан со ссылкой на фиг. 8 в 88, который использует частотную корреляцию, чтобы определять частоту скрытой маркировки, которая определяет идентификатор ретранслятора.
Должно быть понятно, что возможно много разных способов для обнаружения и идентификации идентификатора ретранслятора по скрытой маркировке, например, если скрытая маркировка содержит идентификатор ретранслятора, закодированный посредством быстрой частотной модуляции BPSK (фиг. 5), поиск идентификации ретранслятора может уже использовать не корреляцию, а предпочтительнее способ, основанный на согласованном фильтре, и мог бы потребовать символьной временной синхронизации в ретрансляторе. В одном из примеров, в котором желательно только обнаружение (не идентификация) ретранслятора, кодирование скрытой маркировки, а соответственно, и ее обнаружение, может быть упрощено.
На этапе 78 информация о ретрансляторе, собранная посредством поиска ретранслятора, отправляется в систему управления мобильной станции или PDE для соответствующей обработки. Может быть отмечено в некоторых вариантах осуществления, когда предусмотрено только обнаружение ретранслированного сигнала по скрытой маркировке (то есть неуникальному идентификатору ретранслятора), в таком случае поиск идентификации ретранслятора будет иметь в результате информацию о ретрансляторе, указывающую, был или нет сигнал успешно отсортирован по ретрансляторам (например, хотя бы предпринимался ли поиск ретранслятора, или был ли поиск ретранслятора успешно выполнен), и если так, ретранслирован или нет сигнал. Однако если идентификатор ретранслятора снабжен колебательным сигналом, информация о ретрансляторе также будет включать в себя идентификатор ретранслятора, извлеченный из колебательного сигнала скрытой маркировки для контрольных сигналов, найденных ретранслированными.
Как будет описано в другом месте, со ссылкой на фиг. 9 и 10, AFLT-искатель ретранслятора может пускать в ход многочисленные контрольные сигналы последовательно или параллельно, для того чтобы получать достаточно фазовых измерений (PPM) отсортированных по ретрансляторам контрольных сигналов, чтобы определять положение мобильной станции.
Далее сделана ссылка на фиг. 8, которая является структурной схемой, которая иллюстрирует один из примерных вариантов осуществления системы идентификации ретранслятора, показывающий, каким образом поиск идентификации ретранслятора сконфигурирован, чтобы исследовать сигнал прямой линии связи и извлекать частоту скрытой маркировки, которая соответствует идентификатору ретранслятора, с использованием частотной корреляции со всеми возможными идентификаторами ретранслятора. В этом примере идентификатор ретранслятора содержится в пределах периода (2Т) скрытой маркировки, а N представляет определенное количество скрытых маркировок (идентификаторов ретранслятора), которые могут быть модулированы в одной из примерных схем модуляции.
В 80 AFLT-искатель ретранслятора принимает синфазные (I-фазные) и квадратурные (Q-фазные) выборки контрольного сигнала на fС (частоте элементарного сигнала) и выполняет когерентное накопление NPRE/2 выборок контрольного сигнала, чтобы достичь более высокого коэффициента расширения спектра сигнала. Выходной сигнал когерентного накопления (в 80) включает в себя NPRE/2 выборок контрольного сигнала, уже при более низкой частоте (fС/(NPRE/2)), которые обладают более высоким SNR. Результаты в виде I- и Q-выборок контрольного сигнала отправляются в систему идентификации ретранслятора, которая будет описана со ссылкой на ссылочные номера 82, 84, 86 и 88.
В 82 система идентификации ретранслятора принимает суммы выборок контрольного сигнала NPRE/2 элементарных CDMA-сигналов из AFLT-искателя 80 ретранслятора и когерентно накапливает их более двух раз. Это дополнительное когерентное накопление дополнительно увеличивает SNR и, таким образом, выигрыш от обработки выборок контрольного сигнала.
Может быть отмечено, что два набора когерентного накопления показаны в 82 по двум следующим друг за другом повременным и двум следующим друг за другом задержанным на NPRE/2 элементарных CDMA-сигналов когерентным суммам контрольного сигнала NPRE/2 элементарных сигналов (где z-1 представляет задержку на NPRE/2 элементарных CDMA-сигналов, применяемую к суммам выборок контрольного сигнала NPRE/2 элементарных сигналов). Это один из примерных вариантов осуществления, который может быть реализован, для того чтобы удалить зависимость фазы дискретизации детектора идентификатора ретранслятора, не уменьшая NPRE от его максимально возможного значения TMIN/2 (так, как описано ниже). Другими словами, может быть необходимо когерентно накапливать эти два набора два раза (одно задержанное и одно незадержанное), для того чтобы получить две когерентные суммы по выборкам контрольного сигнала NPRE элементарных сигналов, которые смещены друг от друга на NPRE/2 элементарных сигналов.
В 84 две когерентные суммы выборок контрольного сигнала NPRE элементарных сигналов приняты из 82 (смещенными на NPRE/2 элементарных сигналов), и над ними выполняется та же самая обработка. Таким образом, чтобы описать эту обработку, мы можем сосредоточиться только на обработке верхней повременной суммы NPRE элементарных сигналов выборок контрольного сигнала в 84. Здесь z-1 иллюстрирует задержку на NPRE/2 элементарных CDMA-сигналов, применяемую, чтобы задержать одну сумму NPRE/2 выборок контрольного сигнала, выводимую из 82. Как будет описано со ссылкой на 86, задержанная на NPRE элементарных сигналов и не задержанная версии сумм NPRE выборок элементарных сигналов контрольного сигнала будут предоставлять сигналы, с которыми следует вычислять векторное произведение.
В 86 система идентификации ретранслятора принимает задержанную на NPRE элементарных сигналов и незадержанную суммы NPRE выборок контрольного сигнала из 84 (для обеих, повременной и задержанной на NPRE/2, сумм). Скрытая маркировка затем извлекается посредством вычисления векторного произведения задержанной и незадержанной когерентных сумм NPRE выборок контрольного сигнала элементарных CDMA-сигналов из 84 (для обеих, повременной и задержанной на NPRE/2 элементарных сигналов, сумм). NPRE ограничена не более чем TMIN/2 (который представляет удвоенную частоту Найквиста), где TMIN является минимальным значением Т, обусловленным практической полосой затягивания частоты векторного произведения (fC /4TCPD), где TCPD - частота обновления векторного произведения в элементарных CDMA-сигналах (и равна NPRE элементарным CDMA-сигналам).
Может быть отмечено, что в 86 фиг. 8 два набора векторных произведений показаны параллельно по когерентным суммам NPRE, которые смещены на NPRE/2 элементарных сигналов, которые следуют за двумя наборами когерентных накоплений по вышеописанным причинам. Выходные сигналы этих двух векторных произведений должны быть затем мультиплексированы с разделением во времени, или фазированы, посредством переключения при fS=2fС/NPRE, чтобы извлекать комбинированную частотную скрытую маркировку (например, дискретизированную при 2fС/NPRE, где fС является частотой элементарного CDMA-сигнала и равна 1,2288 МГц).
В 88 система идентификации ретранслятора принимает быструю частотную скрытую маркировку, если она имеет место, и выполняет частотную корреляцию со всеми возможными идентификаторами ретранслятора, чтобы извлечь из нее идентификатор ретранслятора. Частотный коррелятор, по существу, получает частотный спектр колебательного сигнала частотной скрытой маркировки, если она имеет место, которая в свою очередь определяет идентификатор ретранслятора в одном из вариантов осуществления.
Как показано в 88, частотный коррелятор запускает N комплексных циклических сдвигов с частотами N возможных колебательных сигналов скрытой маркировки, наряду с когерентным накоплением по NPOST следующим друг за другом выходным сигналам комплексного циклического сдвига, сопровождаемым M некогерентными накоплениями, чтобы добиться обнаружения и идентификации частотной скрытой маркировки ретранслятора прямой линии связи (FLRFWM). Другими словами, из N результирующих мощностей самая высокая мощность, которая, к тому же, мощнее, чем установленное пороговое значение, выбирается в качестве преобладающего пикового значения, а частота, использованная, чтобы запускать комплексный сдвиг для этого преобладающего пикового значения, определяет частоту (1/(2T)) колебательного сигнала скрытой маркировки ретранслятора. Поэтому ее номер (от 1 до N) определяет идентификатор ретранслятора. Если никакая мощность из N результирующих мощностей не удовлетворяет критерию преобладающего пикового значения (например, все мощности ниже установленного порогового значения), то никакой колебательный сигнал скрытой маркировки не присутствует в FL-сигнале, соответственно, FL-сигнал не ретранслирован.
В одном из примерных вариантов осуществления частотная корреляция содержит алгоритм N-точечного БПФ (быстрого преобразования Фурье, FFT). Может быть отмечено, что выполнение алгоритма N-точечного БПФ (например, 32-точечного БПФ в этом варианте осуществления) является преимущественным по сравнению с выполнением полного NPOST-БПФ (например, здесь - 2×1364 точек), так как оно уменьшает время, необходимое, чтобы выполнять БПФ и, соответственно, время на идентификацию. N-точечное БПФ является достаточным, поскольку скрытая маркировка может иметь только N отдельных частот, таким образом, занимая только небольшую часть всего частотного пространства. Может быть отмечено, что это является только одним из примерных алгоритмов, который может быть использован, чтобы извлекать идентификатор ретранслятора в одном из вариантов осуществления, в котором идентификатор ретранслятора содержится в периоде (2Т) колебательного сигнала скрытой маркировки, и общая численность N возможных уникальных идентификаторов ретранслятора могут быть предоставлены через контрольный сигнал (например, колебательный сигнал по фиг. 4). Однако должно быть понятно, что альтернативные варианты осуществления могут использовать другие алгоритмы, чтобы извлекать информацию о ретрансляторе из примерного колебательного сигнала скрытой маркировки или других колебательных сигналов скрытой маркировки.
Способы AFLT-поиска ретранслятора
Фиг. 9 и 10 - блок-схемы алгоритмов, которые иллюстрируют два альтернативных примерных способа для выполнения поисков ретрансляторов по многочисленным контрольным сигналам, чтобы получать достаточные отсортированные по ретрансляторам фазовые измерения (PPM) контрольного сигнала для определения положения мобильной станции. Может быть отмечено, что существует много возможных способов поиска ретранслятора; однако только два способа проиллюстрированы в материалах настоящей заявки. Например, в A-GPS-системе, может быть определено, что только одно или два дополнительных PPM-измерения могут быть необходимы, чтобы обусловить определение местоположения (в сочетании с PRM-измерениями из GPS); поэтому поиск ретранслятора может потребовать гораздо более простой методологии, которая исследует только один или два самых лучших контрольных сигнала.
Может быть отмечено, что поскольку фиг. 7 и 8 иллюстрируют, каким образом мобильная станция извлекает информацию о ретрансляторе из одиночного контрольного сигнала, фиг. 9 и 10 иллюстрируют способы AFLT-поиска и идентификации ретранслятора, которые включают в себя отбор контрольных сигналов, запуски идентификации ретранслятора по каждому контрольному сигналу и повторение последовательности операций до тех пор, пока достаточно измерений не будет получено для предварительного местоопределения и/или для определения окончательного положения мобильной станции.
Далее делается ссылка на фиг. 9, которая является блок-схемой алгоритма способа выполнения поиска ретранслятора, иллюстрирующей, каким образом система идентификации ретранслятора в мобильной станции выполняет поиск ретранслятора.
На этапе 90 запускается обычный AFLT-поиск по всем контрольным сигналам (например, из наборов активных, кандидатов и соседей).
На этапе 92, для того чтобы начинать операции рационально, определяется «наилучший» обнаруженный контрольный сигнал из обычного AFLT-поиска. Выбор «наилучшего» контрольного сигнала может быть произведен на основании любых подходящих критериев по результатам обычного AFLT-поиска, таким как мощность контрольного сигнала (Ec/Io), RMSE и так далее, где «наилучший» контрольный сигнал мог бы быть сигналом с наивысшим Ec/Io, самой низкой RMSE и так далее, в зависимости от многообразия практических факторов и конструктивных критериев.
На этапе 94 поиск идентификации ретранслятора запускается по отобранному контрольному сигналу, такому как описанный выше со ссылкой на фиг. 7 и 8.
На этапе 96 мобильная станция определяет, было ли получено из поиска ретранслятора достаточно отсортированных по ретрансляторам PPM (то есть достаточно отсортированных по ретрансляторам PPM для целей предварительного местоопределения или для определения окончательного положения MS).
На этапе 97, если не было получено достаточно отсортированных по ретрансляторам PPM, дополнительный контрольный сигнал(ы) необходимо отобрать для сортировки по ретрансляторам.
На этапе 98 отобран следующий «наилучший» контрольный сигнал, такой как описан выше, с номером ссылки 92. Эта последовательность операций продолжается в цикле, повторяя этапы 94 и 96 со следующим наилучшим контрольным сигналом и так далее, до тех пор, пока достаточно измерений контрольного сигнала не обысканы на наличие идентификатора ретранслятора, чтобы точно определять положение MS для предварительного местоопределения или окончательного местоопределения.
На этапе 99, как только достаточное количество PPM-измерений было осортировано по информации о ретрансляторе, выполняется AFLT-поиск ретранслятора и результаты отправляются в соответствующую систему для обработки положения мобильной станции, такую как систему определения положения MS, описанную в другом месте в материалах настоящей заявки (фиг. 6, в 66) или PDE. Как описано более подробно со ссылкой на ссылочные номера 78 и 119, информация о ретрансляторе может содержать указание того, успешно или нет сигнал отсортирован по ретрансляторам (например, поиск ретранслятора даже не был предпринят, или поиск ретрансляторов предпринят, но не удался, или поиск ретранслятора был успешно выполнен), обнаружен или нет сигнал в качестве ретранслированного, а в некоторых вариантах осуществления уникальный идентификатор ретранслятора, ассоциативно связанный с ретранслированным сигналом.
Далее делается ссылка на фиг. 10, которая иллюстрирует альтернативный способ для выполнения поиска ретранслятора по многочисленным контрольным сигналам, которые могут полезно уменьшать время до завершения последовательности операций идентификации ретранслятора. Этот способ пользуется преимуществом того факта, что для более мощных контрольных сигналов, с более высоким Ec/Io, последовательность операций идентификации ретранслятора не должна занимать такую же продолжительность, как для более слабых контрольных сигналов, с более низким Ec/Io, и, кроме того, поддерживать те же рабочие характеристики идентификации (например, те же заданные вероятности ложно найденной неисправности и идентификации). Таким образом, чувствительность поиска идентификации ретранслятора может быть изменена, чтобы улучшить время идентификации, а неглубокие и глубокие поиски могут быть разъединены, для того чтобы обеспечить более быстрый ответ по сценариям высокого Ec/Io.
В этом варианте осуществления система идентификации ретранслятора выполняет идентификацию ретранслятора только по таким многим «наилучшим» контрольным сигналам, обнаруженным из обычного AFLT-поиска, которые необходимы для точного установления условий определения местоположения предварительного местоопределения или окончательного местоопределения, но самой последовательности операций идентификации ретранслятора далее предусмотрено быть более короткой на основании уровня (Ес/Io) сигналов.
На этапе 100 обычный AFLT-поиск был запущен по всем контрольным сигналам из наборов активных, кандидатов и соседей, а L наилучших результатов обычного AFLT-поиска отправляются в систему идентификации ретранслятора, чтобы выполнять по ним AFLT-поиск ретранслятора. Отбор «наилучшего» контрольного сигнала может быть произведен на основании любых подходящих критериев, по результатам обычного AFLT-поиска, таких как уровень контрольного сигнала (Ec/Io), RMSE и так далее, где «наилучший» контрольный сигнал мог бы быть с самым высоким Ec/Io, самой низкой RSME и так далее, в зависимости от многообразия конкретных факторов и конструктивных критериев.
На этапе 101 система идентификации ретранслятора выбирает первый контрольный сигнал в наборе из L наилучших контрольных сигналов.
На этапе 102 каждый контрольный сигнал группируется на основании его уровня Ec/Io в четыре группы S1,2,3,4 уровня контрольного сигнала, которые должны быть найдены с помощью 4 поисков идентификации ретранслятора переменных уровней Ec/Io и, соответственно, переменных времен поиска. Группирование может быть выполнено, как изложено ниже: установлены пороговые значения Th1,2,3,4 (с Th1, являющимся самым высоким, и Th4, являющимся самым низким пороговым значением Ec/Io), измерение Ec/Io для первого контрольного сигнала сравнивается с первым пороговым значением (Th1) и помещается в группу S1, если найдено большим, чем такое пороговое значение, если нет, то контрольный сигнал сравнивается с Th2 и помещается в группу S2, если найден большим, чем такое пороговое значение, и так далее.
На этапе 103, если контрольные сигналы еще остались в L лучших результатах из обычного AFLT-поиска, цикл продолжается до тех пор, пока все L лучших контрольных сигналов не сгруппированы.
На этапе 104 самый короткий и самый неглубокий поиск S1 выполняется первым по всем контрольным сигналам в S1, в группе самых мощных, параллельно. Может быть отмечено, что каждая из четырех групп S1,2,3,4 самых мощных контрольных сигналов содержит переменные уровни Ec/Io и, соответственно, переменные времена поиска. Таким образом, если все L «наилучших» контрольных сигналов, обнаруженные при обычном AFLT-поиске, которые требуется отсортировать по ретрансляторам, имеют высокое Ec/Io (то есть > Th1), идентификация ретранслятора будет завершаться без необходимости выполнять какие-либо глубокие поиски (например, во всех контрольных сигналах будут отыскиваться идентификаторы ретрансляторов самым неглубоким и, соответственно, самым коротким поиском S1), таким образом, минимизируя время, необходимое для выполнения последовательности операций идентификации ретранслятора.
На этапе 105, если получено достаточно фазовых измерений отсортированных по ретрансляторам контрольных сигналов (то есть отсортированных по ретрансляторам PPM), чтобы определить положение MS, никакого поиска ретранслятора больше не нужно.
На этапе 106 поиск ретранслятора (например, этап 104) повторяется над оставшимися в группе поиска контрольными сигналами до тех пор, пока все контрольные сигналы не отсортированы по информации о ретрансляторе, или до тех пор, пока достаточное количество измерений транслятора не получено для предварительного местоопределения и/или окончательного определения местонахождения MS.
На этапе 107 этапы со 104 по 106 повторяются над оставшимися группами (S2,3,4) до тех пор, пока еще есть группы поиска (например, i=4 в этом примере).
На этапе 108, после того как достаточно измерений о ретрансляторах получено или больше не осталось групп поиска, обработка завершается и соответствующие измерения могут быть отправлены для предварительного местоопределения или окончательного местоопределения (определения положения) MS.
В некоторых вариантах осуществления может быть привлечена концепция предпочтительного качества частотной характеристики, когда разные значения предпочтительного качества частотной характеристики согласуются с желаемой чувствительностью поиска ретранслятора, целевыми вероятностями, целым/добавленным и максимально возможным временем на идентификацию. Таким образом, мы можем получить разные предпочтительные значения качества частотной характеристики для поиска ретранслятора определения грубого начального положения (то есть предварительного метоопределения) и окончательного положения (то есть окончательного местоопределения), чтобы предусмотреть разные требования максимального времени на идентификацию из числа этих двух. Кроме того, мы можем получить разные предпочтительные значения качества частотной характеристики для окончательного местоопределения, а также предусмотреть возможную разницу требований различных видов применения последовательности операций обнаружения ретранслятора.
Предпочтительное значение качества частотной характеристики могло бы устанавливать целевые вероятности ошибки процесса обнаружения, которые будут задавать чувствительности Ec/Io поиска S1,2,3,4, а также ряд различных других параметров поиска ретранслятора, таких как, какое максимальное и минимальное количество контрольных сигналов для такового поиска ретранслятора должно быть выполнено, а также максимальное полное время на идентификацию. Пороговые значения Th1,2,3,4 обнаружения поиска могли бы затем быть динамически отрегулированы согласно поиску ретранслятора на основании результатов, полученных из обычного AFLT-поиска и желаемых предпочтительных параметров качества частотной характеристики, чтобы дополнительно минимизировать полное время на идентификацию. Например, даже если предпочтительное качество частотной характеристики может быть установлено для максимально допустимого времени на идентификацию, когда все AFLT-измерения, которые требуется отсортировать по ретрансляторам, имеют высокое Ec/Io, в таком случае, пороговые значения Th1,2,3,4 в сеансе AFLT-поиска ретранслятора могли бы быть динамически отрегулированы, с тем чтобы не выполнялось никаких глубоких поисков, таким образом, минимизируя действующее время на идентификацию.
Как будет описано более подробно в следующем разделе, поиски ретранслятора (и, соответственно, идентификация ретранслятора) могут быть выполнены только когда необходимо, то есть только для предварительного местоопределения или только когда GPS-поиск (если A-GPS является применяемым) не возвращает достаточно GPS-измерений, чтобы обусловить определение местоположения, для того чтобы сохранять время обработки данных (MIPS, в миллионах команд в секунду) и укороченное время местоопределения. Один из способов определения местоположения будет описан со ссылкой на фиг. 11.
Примерный способ определения положения с использованием FLRFWM
Фиг. 11 - блок-схема алгоритма одного из примерных способов установления условий определения местоположения мобильной станции с использованием AFLT или A-GPS в сотовых зонах покрытия, в которых присутствуют ретрансляторы. Должно быть очевидно, что многие другие способы определения положения могут быть реализованы с использованием системы идентификации ретранслятора, раскрытой в материалах настоящей заявки.
На этапе 110 получен перечень поиска соседей сотовой BTS. Перечень поиска сот будет использоваться, чтобы отыскивать контрольные сигналы от сотовых станций в перечне, и он также может включать в себя информацию, полезную при нахождении контрольных сигналов станций в перечне.
Перечень поиска сот может быть получен разнообразными путями; в одном из простых вариантов осуществления перечень поиска сот включает в себя все возможные контрольные сигналы в сотовой системе; однако поиск всех возможных контрольных сигналов может занимать нежелательное количество времени. Для того чтобы экономить время, в одном из вариантов осуществления локальная сотовая базовая станция, поддерживающая связь с мобильной станцией, может предоставлять перечень поиска сот для мобильной станции, включающий в себя интервалы поиска, по которым следует отыскивать каждый контрольный сигнал. Отметим, что перечень поиска сот мог бы быть модифицирован, чтобы также включать в себя любую вспомогательную информацию о ретрансляторе, которая доступна обслуживающей базовой станции, если таковая имеется, такую как все возможные ретрансляторы по PN-кодам в перечне, их идентификаторы и их внутренние задержки (и, возможно, их местоположения, если определение местоположения должно быть выполнено на MS). Это может помочь в уменьшении времени на идентификацию ретранслятора и, соответственно, времени местоопределения.
На этапе 112 AFLT-измерения снимаются с контрольных сигналов от каждой сотовой BTS по перечню поиска сот. Может быть отмечено, что даже если мощность контрольного сигнала достаточна для установления связи, контрольный сигнал может иметь все еще достаточную мощность, чтобы быть обнаруженным и быть пригодным, для измерения времени прибытия и других качеств.
В одном из вариантов осуществления AFLT-измерения включают в себя оценку самого раннего времени прибытия (TOA), оценку RMSE пути распространения, обеспечивающего самое раннее TOA, и оценку Ec/Io для всех разрешимых путей распространения контрольного сигнала, которые будут использованы, чтобы обновлять Ec/Io для контрольного сигнала. Измерения могут быть сохранены в базе данных PPM, такой как показанная на фиг. 6, в которой каждый контрольный сигнал ассоциативно связан с большим количеством связанных измерений.
На этапе 114 может быть получен перечень поиска GPS-спутников. Это является необязательной операцией, которая преимущественно предоставляет перечень поиска, который может быть использован GPS-системой, чтобы разыскивать спутники, тем самым, уменьшая время, необходимое для захвата спутников, достаточных, чтобы получать фиксацию положения. В качестве альтернативы GPS-система может просто обыскивать весь небосвод; однако такой полный небесный поиск типично занимает много большее время.
На этапе 116 GPS-измерения получены в соответствии с пригодными GPS-процедурами. В одном из вариантов осуществления GPS-система связи сначала разыскивает спутники, заданные в перечне видимых спутников, по интервалам поиска, заданным в перечне, что может значительно уменьшать время, требуемое для получения достаточных GPS-сигналов.
На этапе 117 MS определяет, получено ли достаточно GPS-измерений, чтобы обусловить определение местоположения. Если получено достаточно измерений, нет причин принимать на себя дополнительную обработку в MS, обработка переходит к этапу 119 в блок-схеме алгоритма, чтобы предоставить соответствующие измерения псевдодальности (а также, возможно, PPM-измерения из обычного AFLT-поиска и информацию о ретрансляторе, показывающую, что поиск ретранслятора не выполнялся) либо системе определения положения, размещенной в пределах MS, либо PDE, локализованной в сети, внешней по отношению к MS, но на сотовой связи с ней. Система определения положения или PDE обрабатывает GPS-измерения и возвращает определение местоположения MS. Если достаточных измерений не получено, AFLT-поиск 118 ретранслятора запускается, как описано со ссылкой на фиг. 9 или 10 и как ниже описано со ссылкой на этап 118.
На этапе 118 AFLT-поиск ретранслятора выполняется по контрольным сигналам, полученным во время обычного AFLT-поиска, как описано более подробно со ссылкой на фиг. 9 или фиг. 10. Так как поиск ретранслятора выполняется по контрольным сигналам, уже найденным при обычном AFLT-поиске, поиск выполняется по небольшим интервалам поиска, и искатель способен справляться с ними одновременно. Основываясь на современной технологии поиска, ретрансляторы могут параллельно отыскиваться приблизительно в от 1 до 8 контрольных сигналах, в зависимости от целевого модема мобильной станции (MSM).
На этапе 119 измерения псевдодальности (PRM) из GPS-поиска, фазовые измерения контрольного сигнала (PPM) из обычного AFLT-поиска и информация о ретрансляторе из (AFLT-) поиска ретранслятора могут быть предоставлены системе определения положения, размещенной в пределах MS или PDE в расположении, внешнем по отношению к MS, но на беспроводной связи с ней. Система определения положения MS или PDE обрабатывает все эти измерения, чтобы получить определение местоположения MS.
Может быть отмечено, что в некоторых вариантах осуществления, где предоставляется только возможность обнаружения ретранслированного сигнала в пределах скрытой маркировки (то есть без уникального идентификатора ретранслятора), в таком случае, информация о ретрансляторе, выработанная посредством поиска ретранслятора, будет указывать, успешно или нет сигнал отсортирован по ретрансляторам (например, поиск ретранслятора даже не был предпринят, или поиск ретрансляторов был предпринят, но не удачен, или поиск ретранслятора был выполнен успешно) и, если это так, ретранслирован или нет сигнал. В этих вариантах осуществления система определения положения MS или PDE может затем осуществить выбор, что следует определять положение MS посредством исключения PPM-измерений по ретранслированным сигналам и по сигналам, которые не были успешно отсортированы по ретрансляторам.
Также может быть отмечено, что в некоторых вариантах осуществления, если идентификатор ретранслятора предоставлен в пределах колебательного сигнала скрытой маркировки, информация о ретрансляторе, собранная посредством поиска ретранслятора, также будет включать в себя идентификатор ретранслятора, извлеченный из колебательного сигнала скрытой маркировки, когда какие-либо сигналы ретранслированы. В этих вариантах осуществления система определения положения MS или PDE может затем использовать информацию об идентифицированных ретрансляторах (например, их местоположение и внутренние задержки), чтобы рассчитывать положение мобильного устройства с помощью PPM-измерений учтенных ретранслированных сигналов.
Может быть отмечено, что для последовательностей операций вызова, которые касаются вычислений грубого начального положения (то есть предварительного местоопределения), на основании AFLT-измерений в целях создания более точной вспомогательной GPS-информации (меньших GPS-интервалов) AFLT-поиск «ретранслятора» мог бы быть выполненным до использования измерений обычного AFLT-поиска при расчете предварительного местоопределения, для того чтобы обеспечивать более точные интервалы GPS-поиска.
Пример реализации FLRFWM
В одном из вариантов осуществления FLRFWM применяется к CDMA-системе, чтобы оптимизировать выполнение определения местоположения. Результаты примерной реализации для обоснованных целевых вероятностей ошибочных событий, таких как вероятность ложно найденной неисправности (PFA), вероятность неудачного обнаружения (PMISSDET) и вероятность неудачной идентификации (PMISSID), около 10-2, включают в себя идентификацию частотной скрытой маркировки FL для контрольных сигналов, падающих приблизительно до -16,9 дБ - в течение приблизительно 358 микросекунд (мкс), -19,2 дБ - в течение приблизительно 712 мкс, -21,2 дБ - в течение приблизительно 1,423 секунд и -23,1 дБ - в течение приблизительно 2,844 секунд.
В этой примерной реализации колебательный сигнал модуляции, примененный к сигналу прямой линии связи посредством быстрого частотного (высокоскоростного) FM-модулятора, является периодическим прямоугольным сигналом с амплитудой +/-fA и периодом 2Т, где fA в этом примерном варианте осуществления - 50 Гц, а Т в диапазоне [10×64:inc:11×64] элементарных сигналов. Должно быть отмечено, что инкремент inc выбран, чтобы добиться одинакового расстояния скрытых маркировок по частоте для более легкого обнаружения, и значение затем усечено до самого близкого такта элементарного сигнала × 8. В этом примере результирующие частоты колебательного сигнала скрытой маркировки находятся в диапазоне приблизительно от 872,72 Гц до 960 Гц с одинаковым интервалом приблизительно в 2,815 Гц; достигается минимальное ухудшение рабочих характеристик CDMA-FL, обусловленное частотной скрытой маркировкой.
Может быть отмечено, что ограничение состоит в том, что этот пример может быть выполнен для ограниченного количества (например, 32) идентификаторов ретранслятора, требуя от некоторого обеспечивающего алгоритма быть реализованным где-нибудь в системе. Основанные на FLRFWM схемы могут быть поэтому более пригодны для вводимых в действие носителем ретрансляторов сектора, где носитель мог бы запускать обеспечивающий алгоритм в качестве части ввода в действие ретранслятора, чем для отдельных ретрансляторов, где обеспечивающие схемы могут быть жесткими для реализации или где количество ретрансляторов могло бы вырастать выше такого, которое могут поддерживать схемы, основанные на быстрой частотной скрытой маркировке прямой линии связи.
Также может быть отмечено, что, в качестве желаемого, частотные следящие контуры не являются отслеживающими колебательный сигнала частотной скрытой маркировки, поскольку самая медленная скрытая маркировка ретранслятора имеет максимальный Т (TMAX) около 1/60-й постоянной времени частотных следящих контуров. Результирующая переменных пульсаций составляет около +/-3,0 Гц на частоте PCS (которая эквивалентна приблизительно 2,5 Гц на частоте GPS), наряду с тем, что достигается средняя ошибка оцениваемой частоты в 0 Гц; следовательно, скрытая маркировка незначительно влияет на рабочие характеристики как GPS, так и AFLT.
Примерная реализация использует детектор идентификатора ретранслятора, описанный со ссылкой на фиг. 8. Должно быть отмечено, что два набора векторных произведений производятся параллельно над когерентными суммами NPRE элементарных сигналов, которые смещены на NPRE/2 элементарных сигналов, вместо уменьшения NPRE от его максимально возможного значения, для того чтобы уменьшить зависимость SNR детектора идентификатора ретранслятора от фазы дескретизации, без необходимости расплачиваться результирующей неустойкой в SNR детектора. NPRE установлен в максимально возможное значение TMAX/2 (например, 5×64 элементарных CDMA-сигналов в примерной реализации), для того чтобы максимизировать коэффициент расширения спектра сигнала, необходимый для целевых вероятностей ложно найденной неисправности, обнаружения и идентификации по диапазону интересующих уровней Ec/Io контрольного сигнала. Проектное ограничение в максимальном NPRE обусловлено практической полосой затягивания векторного произведения с ограничением в fС/(4TCPD), где TCPD - частота обновления векторного произведения в элементарных CDMA-сигналах, как обсуждено в другом месте в материалах настоящей заявки. Частотный коррелятор запускается по 32 частотам идентификаторов ретранслятора, чтобы идентифицировать частотную скрытую маркировку FL. Длина когерентного накопления после комплексного сдвига в 2×1364 выбрана для NPOST, с тем чтобы элемент разрешения по частоте был достаточно мал, чтобы быть пригодным для разрешения выделения сигнатуры ретранслятора по частоте (здесь 2,815 Гц). Увеличение NPOST сверх этого значения могло бы до некоторой степени (значительно меньше, чем увеличение в NPRE, как будет обсуждено ниже) увеличить коэффициент расширения спектра сигнала, однако, возможно, увеличивая время местоопределения.
В заключение, для чувствительности Ec/Io = -16,9 дБ необходимо только одно некогерентное накопление (то есть М=1), для Ec/Io = -19,2 дБ М=2, для Ec/Io = -21,2 дБ М=4 и для чувствительности Ec/Io = -23,1 дБ М=8.
Допуская, что мы ищем по небольшим интервалам поиска, поскольку контрольные сигналы повторного поиска уже найдены при обычном AFLT-поиске, и рассматривая время для выполнения векторного произведения и частотной корреляции по 32 частотам идентификаторов ретранслятора в качестве фоновой задачи, определенное в TFC, время на идентификацию могло бы быть приблизительно (NPRENPOSTM + TFC) элементарных сигналов на контрольный сигнал. Таким образом, если мы оцениваем TFC являющимся около 2 мс, то время на обнаружение становится около 358 мс на контрольный сигнал, для поиска S1 c чувствительностью Ec/Io в -16,9 дБ.
Должно быть отмечено, что, для того чтобы сэкономить время на идентификацию и время обработки (MIPS), поиск ретранслятора может быть выполнен только когда необходимо, то есть всякий раз, когда желательно основанное на AFLT предварительное местоопределение, и для окончательного местоопределения, только когда GPS-поиск не возвращает достаточных измерений, чтобы определить положение мобильной станции.
Также должно быть принято во внимание, что количество некогерентных сумм может быть разным для предварительного местоопределения и окончательного местоопределения (то есть начального и конечного AFLT-поисков) и также может быть динамически настраиваемым, если требуется, на основании результатов обычного AFLT-поиска и желаемого качества частотной характеристики, как уже обсуждалось. Более короткий, менее чувствительный AFLT-поиск ретранслятора может быть выполнен для предварительного местоопределения, и либо более короткий или более длинный/более чувствительный AFLT-поиск ретранслятора может быть выполнен для окончательного местоопределения, как требуется, на основании результатов обычного AFLT-поиска и желаемого предпочтительного качества частотной характеристики. Поиск идентификации ретранслятора может продолжать способ, проиллюстрированный на фиг. 10.
Выбор колебательного сигнала модуляции для скрытой маркировки и его характеристик предназначен, чтобы удовлетворять четырем противоречащим условиям: минимальному нежелательному влиянию на рабочие характеристики FL, а также рабочие характеристики AFLT и GPS, максимальным вероятностям обнаружения и идентификации и минимальному времени на идентификацию.
Для того чтобы минимизировть влияние на рабочие характеристики FL, скрытая маркировка может быть спроектирована, чтобы иметь в результате минимальное ухудшение SNR CDMA-FL, то есть чтобы усредненные потери не превышали 0,2 дБ, посредством минимизации фазового отклонения через минимизацию TMAX и fA. Дополнительно, минимальное неблагоприятное воздействие на рабочие характеристики GPS и AFLT может быть достигнуто посредством гарантирования того, что частотные следящие контуры не отслеживают колебательный сигнал частотной скрытой маркировки, посредством выбора достаточно небольшого значения TMAX для колебательного сигнала модуляции, с тем чтобы скрытая маркировка была не обнаруживаемой посредством FTL так, как описано в другом месте в материалах настоящей заявки, то есть никакой вклад в среднее значение и минимальный вклад в переменную составляющую не должен быть виден в FTL, а максимальное увеличение в двойной амплитуде неравномерности не должно быть больше, чем приблизительно несколько Гц.
Выбор максимального значения Т (TMAX) и амплитуды частоты (FA) предназначены, чтобы уравновесить два противоречивых требования, а именно минимизацию ухудшения рабочих характеристик CDMA-FL, AFLT и GPS, которая минимизирует fA и TMAX, наряду с максимизацией fA и TMAX для наилучшей вероятности обнаружения и идентификации. Например, чтобы минимизировать неблагоприятное воздействие колебательного сигнала скрытой маркировки на рабочие характеристики FL, TMAX был выбран, являющимся 11×66 элементарными сигналами, а fA не больше чем +/-50 Гц; эти максимально допустимые значения были выбраны для этих параметров, для того чтобы до предела увеличить вероятность обнаружения и идентификации ретранслятора. Это TMAX приблизительно является 1/60-й самой быстрой постоянной времени FLT (где самая быстрая постоянная времени определена для отслеживания контрольного сигнала PCS в -3,0 дБ), с тем чтобы результирующее отклонение, в наихудшем случае, для наиболее медленно меняющегося колебательного сигнала скрытой маркировки с периодом 2ТMAX на GPS-частоте, была +/-2,5 Гц, а Доплеровское смещение CDMA-кода, в самом худшем случае, было приблизительно +/-3,0 Гц, которые имеют в результате минимальное неблагоприятное влияние на рабочие характеристики AFLT и GPS.
Может быть показано, что SNR выходного сигнала поиска идентификатора ретранслятора при входе в некогерентную стадию примерно равно

где TC - период элементарного CDMA-сигнала = 1/fC, EC - энергия рассеяния контрольного сигнала по элементарному CDMA-сигналу, σn - средняя шумовая девиация выборки контрольного сигнала, α - падение в выходной мощности сигнала векторного произведения от идеальной, в дБ, и k - увеличение шумового расхождения, обусловленное корреляцией соседних выборок шума векторного произведения. Также заметим, что увеличение SNR выходного сигнала детектора идентификатора ретранслятора будет иметь в результате увеличение вероятности обнаружения и идентификации. Из этого выражения очевидно, что наибольшее увеличение в SNR детектора идентификатора ретранслятора (и соответственно, вероятностей обнаружения и идентификации) может быть достигнуто при увеличении NPRE, сопровождаемом увеличением fA.
Верхнее проектное ограничение по частоте колебательного сигнала скрытой маркировки (нижнее ограничение по TMIN) может быть выбрано при уравновешивании вероятности обнаружения и времени на идентификацию. Для минимального времени на идентификацию TMAX должно быть минимизировано, тогда как для максимальной вероятности обнаружения идентификатора ретранслятора TMIN должно быть увеличено до максимума. А именно TMIN будет определять SNR детектора посредством навязывания максимально возможного NPRE. Чтобы гарантировать дискретизацию колебательного сигнала быстрой частотной модуляции на частоте Найквиста, максимальное NPRE должно быть установлено при TMIN. Кроме того, практическая полоса затягивания в fC/(4TCPD) дискриминатора векторного произведения, где TCPD - частота обновления векторного произведения и равна NPRE элементарных CDMA-сигналов, ограничивает максимальное NPRE. А именно наибольшая частота скрытой маркировки, fMAX = fC/(2TMIN), не должна превышать границу практической полосы затягивания частоты векторного произведения; как результат, максимальным значением NPRE является TMIN/2. NPRE, в свою очередь, будет обладать наибольшим влиянием на SNR детектора идентификатора ретранслятора, как описано выше. В этой примерной реализации скомбинированы вышеприведенные соображения, и наилучшее полное TMIN является приблизительно 10×64 элементарными сигналами.
Принимая во внимание эти рекомендации, специалистами в данной области техники будет принято во внимание, что альтернативные варианты осуществления могут быть реализованы, не отклоняясь от сущности или объема изобретения. Это изобретение должно ограничиваться только последующей формулой изобретения, которая включает в себя все такие варианты осуществления и модификации, когда рассматривается в соединении с вышеприведенным патентным описанием и сопутствующими чертежами.
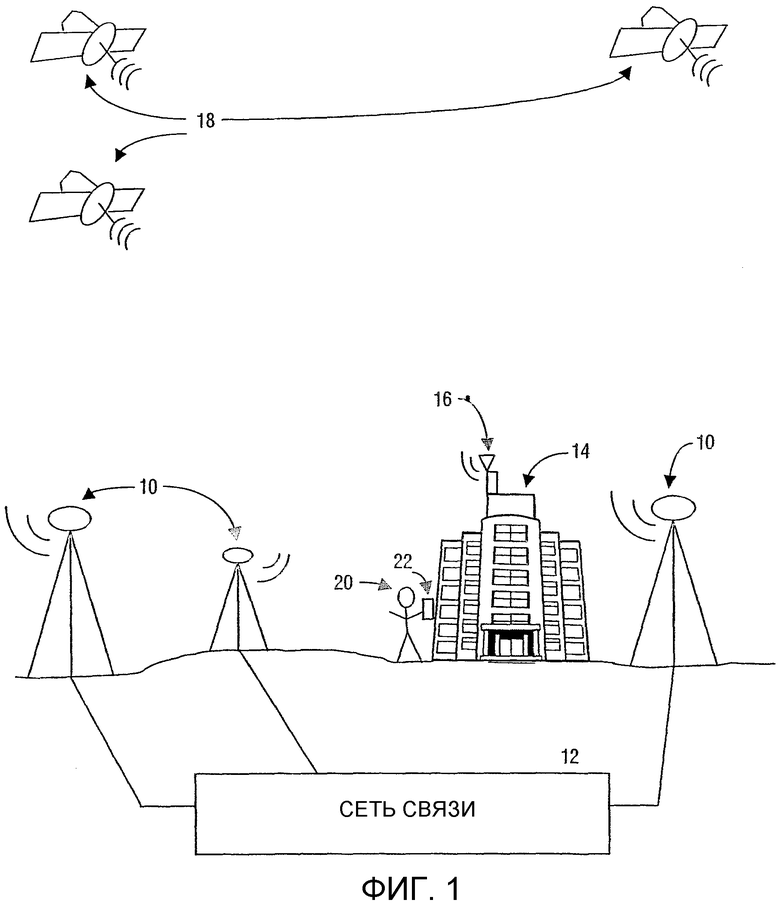
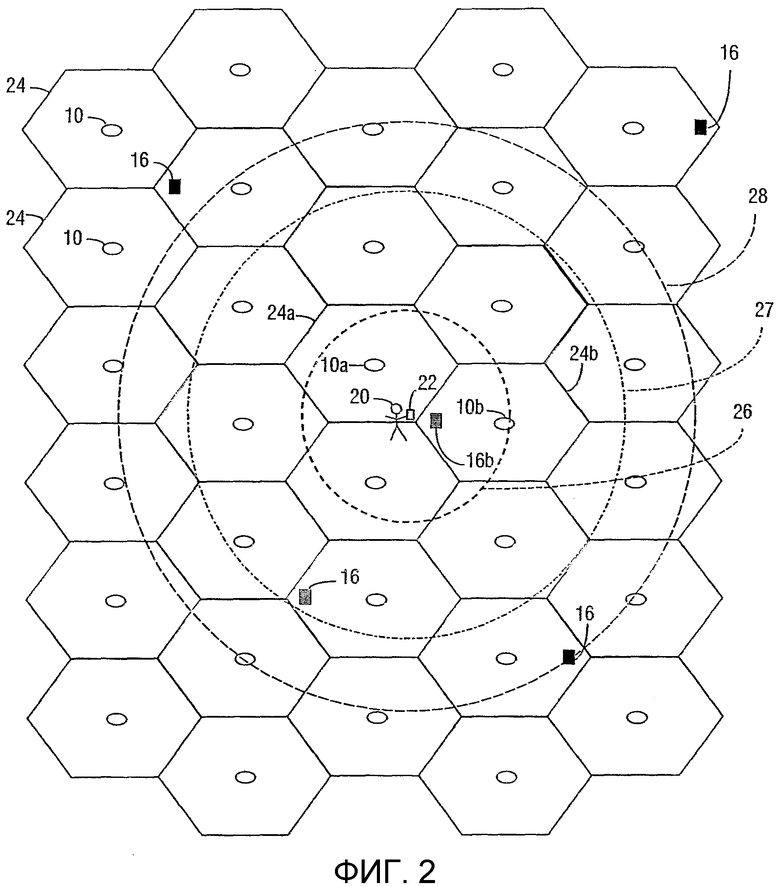
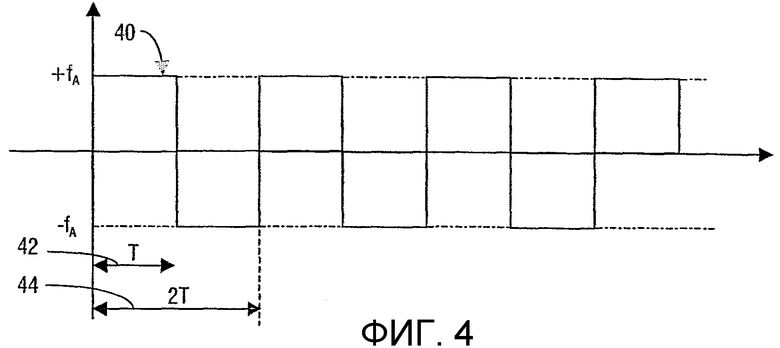
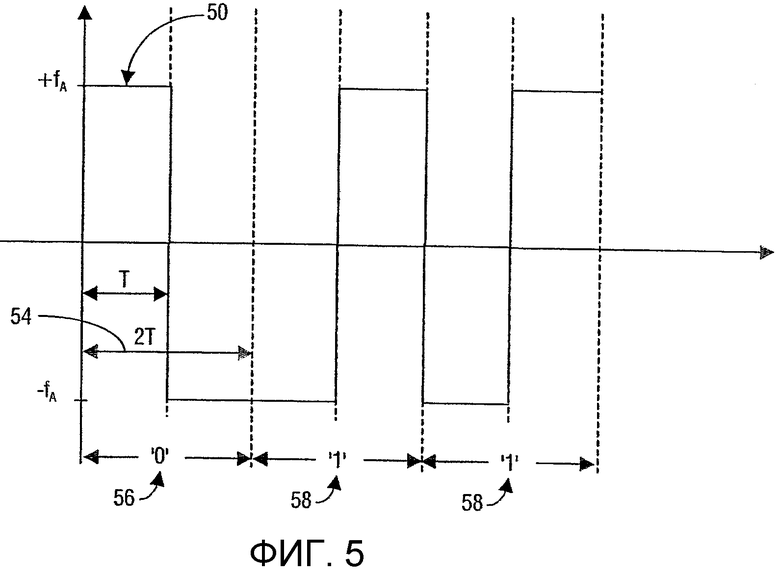

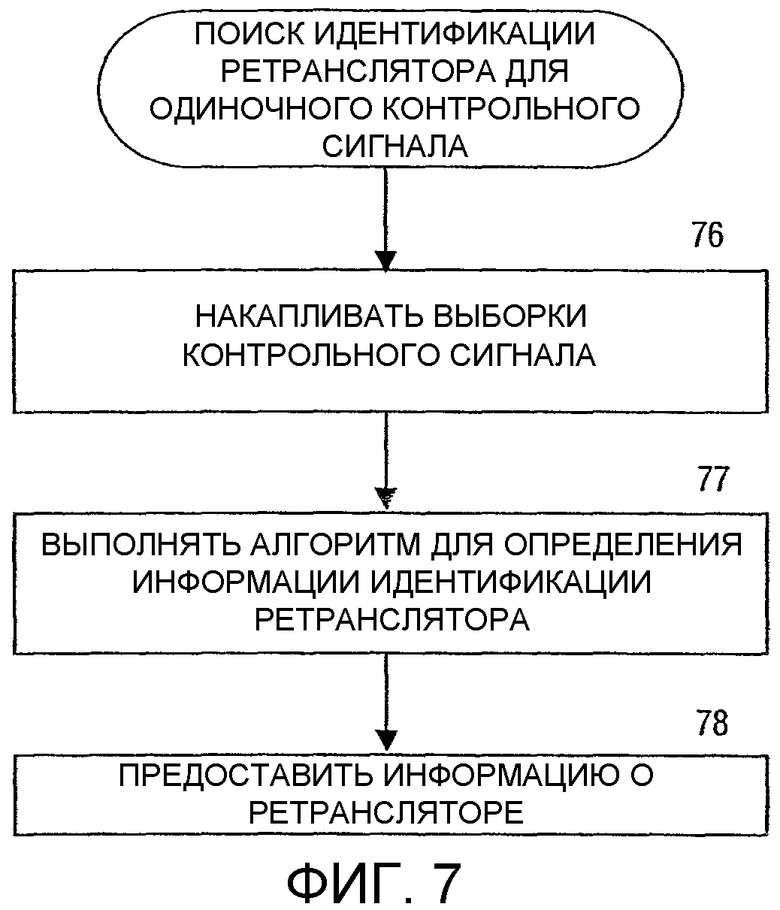
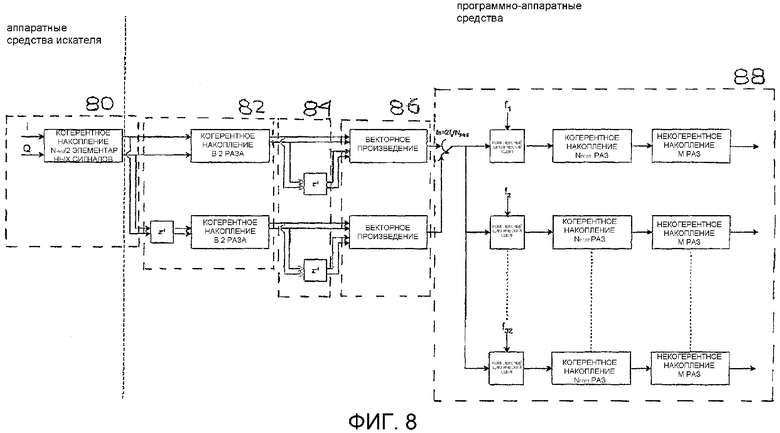
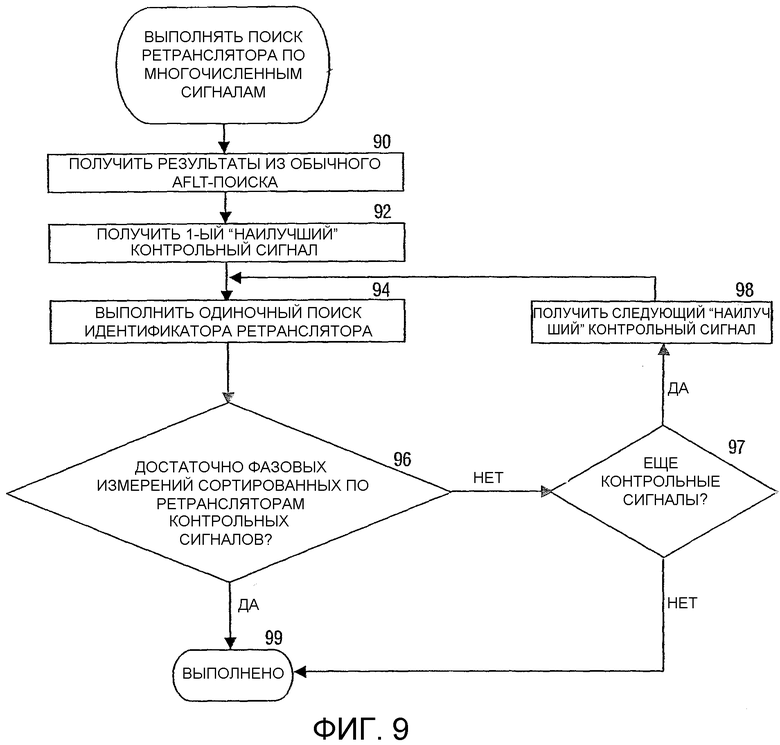
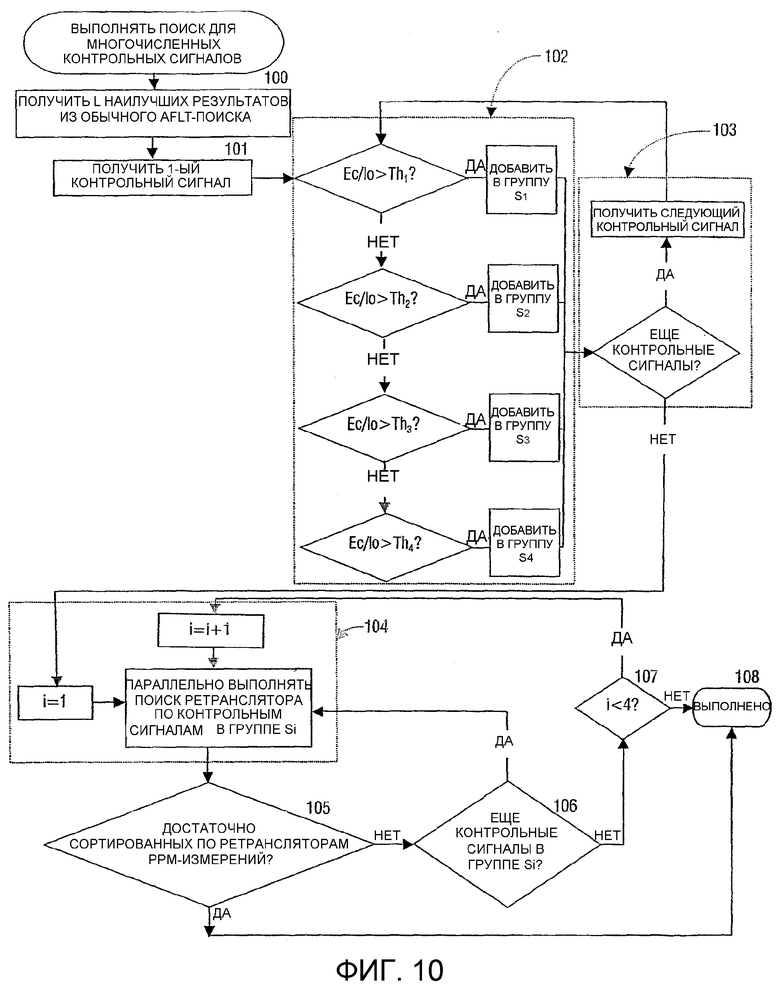
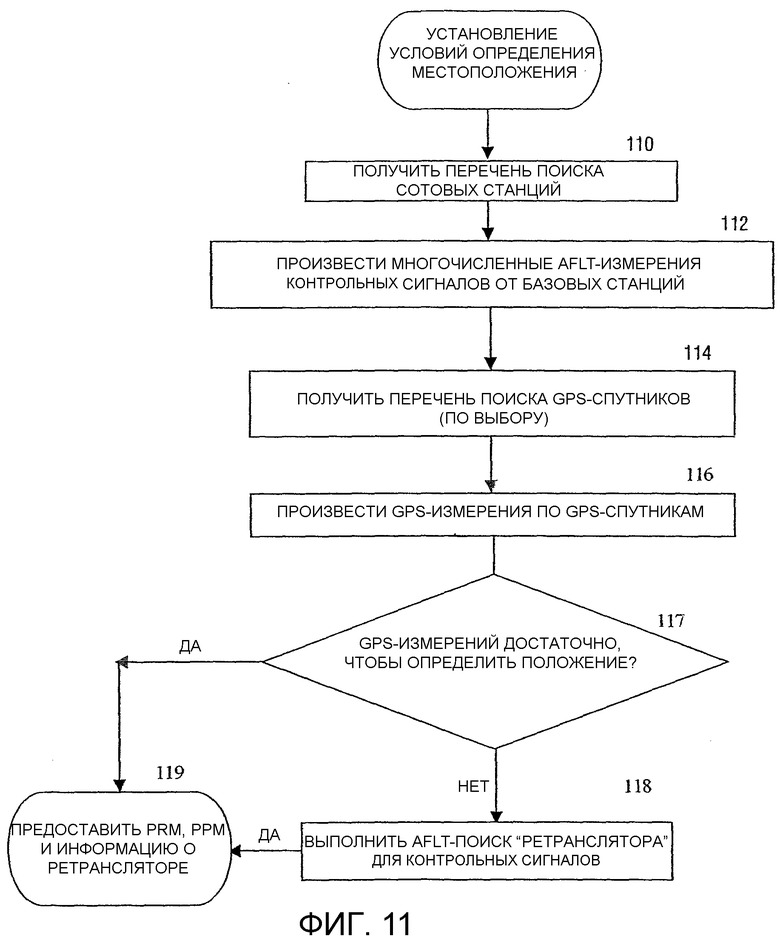
Изобретение относится к системам определения местоположения, которые используют беспроводные сигналы, чтобы определять местоположение электронного мобильного устройства. Достигаемый технический результат - уменьшение времени обнаружения/идентификации мобильной станции. Ретранслятор содержит высокоскоростной частотный модулятор, который модулирует частоту сигнала прямой линии связи идентифицирующей быстрой частотной скрытой маркировкой в то время, как он проходит через ретранслятор. Мобильная станция для приема большого количества пилот-сигналов прямой линии связи и идентификации присутствия колебательного сигнала быстрой частотной скрытой маркировки содержит приемник для приема сигналов прямой линии связи, частотный следящий контур для обеспечения точной демодуляции сигналов прямой линии связи, AFLT-искатель (AFLT - усовершенствованная трилатерация прямой линии связи) для обнаружения пилот-сигналов и выполнения фазовых измерений пилот-сигнала, измерения времени прибытия большого количества пилот-сигналов прямой линии связи, систему идентификации ретранслятора, сконфигурированную с возможностью обнаружения и идентификации скрытой маркировки и тем самым идентифицирования ретранслированного сигнала прямой линии связи. В способе определения информации для определения местоположения мобильной станции из прямой линии связи большого количества пилот-сигналов выполняют AFLT-поиск в мобильной станции, чтобы обнаружить пилот-сигналы и измерить самое раннее время прибытия пилот-сигнала из большого количества пилот-сигналов, выбирают первый пилот-сигнал, выполняют AFLT-поиск ретранслятора в упомянутом первом пилот-сигнале, отыскивают колебательный сигнал быстрой частотной скрытой маркировки, который идентифицирует ретранслированный сигнал, повторяют этапы выполнения сортировки по ретрансляторам для большого количества других выбранных пилот-сигналов, предоставляют фазовые измерения пилот-сигнала и информацию о ретрансляторе для пилот-сигналов, полученных при AFLT-поиске, системе определения положения мобильной станции или сетевому объекту определения положения. 4 н. и 31 з.п. ф-лы, 11 ил.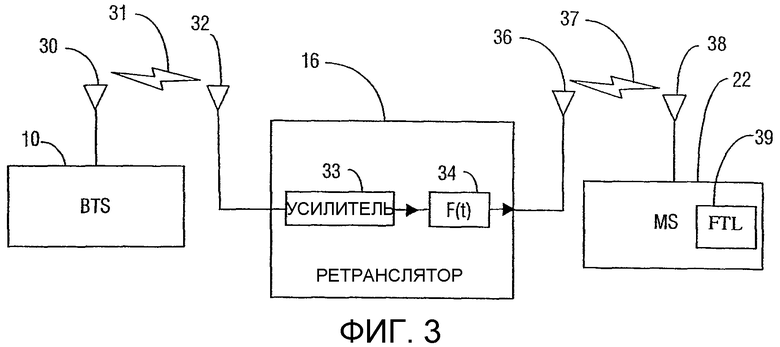
| US 6501955 В1, 31.12.2002 | |||
| СИСТЕМА УПРАВЛЕНИЯ СРЕДСТВАМИ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛОВ ЧЕРЕЗ СПУТНИКОВЫЕ РЕТРАНСЛЯТОРЫ | 1996 |
|
RU2153226C2 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Автомат для серебрения поверхности трубчатых заготовок керамических конденсаторов | 1959 |
|
SU126557A1 |
| УСТРОЙСТВО СОПРЯЖЕНИЯ ОТСЧЕТОВ МНОГОКАНАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ УГОЛ—ФАЗА—КОД | 0 |
|
SU292182A1 |

