Изобретение относится к охранной технике и может использоваться при защите открытых территорий от несанкционированного доступа.
Охранные системы в большинстве своем предназначены для обнаружения нарушения границ охраняемого объекта.
Известны различные системы обнаружения проникновения движущихся объектов на запрещенную территорию с фиксацией факта пересечения контура этой территории. Физические принципы работы этих систем различны. Распространены лучевые системы, в которых, например, фиксируется факт пересечения инфракрасного излучения. Основным недостатком таких систем является высокая стоимость датчиков и невозможность различения факта пересечения контура человеком или другим объектом, например животным.
Известно устройство для охранной сигнализации (патент №2066476, 1996 г.), объединяющее реализацию двух принципов обнаружения магнитометрического и сейсмического с использованием чувствительного элемента в виде двух многожильных (не менее двух в каждой) кабельных линий, прокладываемых параллельно по периметру рубежа охраны. При этом тракт сейсмической обработки информации выполнен двухканальным, каждый канал которого отличается полосой пропускания сигнала. Решение об обнаружении нарушителя может приниматься при срабатывании магнитометрического тракта, фиксирующего появление на рубеже охраны ферромагитных материалов либо при срабатывании сейсмического тракта, фиксирующего наличие импульсного воздействия на грунт в непосредственной близости от рубежа. Использование двух каналов сейсмического тракта позволяет обеспечить работоспособность системы при различном состоянии грунта.
Кроме того, в сейсмическом тракте устройства реализуется классификация сигналов по признаку «нарушитель-животное», поскольку в большинстве случаев спектральные характеристики и форма сигналов от "нарушителя", а также скорость их появления значительно отличаются от аналогичных характеристик помех от животных. Это связано, например, с различиями ходьбы (разная частота следования шагов у животных и людей), видом воздействия копытных животных на грунт, весом животных, скоростью перемещения.
Однако основным недостатком устройства в целом является отсутствие возможности определения места прорыва нарушителем рубежа охраны, поскольку в качестве чувствительного элемента используются протяженные кабели. При этом ширина рубежа охраны ограничивается несколькими метрами в силу низкой чувствительности кабельных элементов.
Принципиально эти проблемы решаются при использовании в качестве источника информации (чувствительных элементов) сейсмических датчиков (геофонов).
При этом используется распределенная вдоль границы объекта система сейсмоакустических датчиков, связанных с центром обработки кабельной системой передачи информации. Причем сигналы каждого датчика обрабатываются независимо, а в качестве критерия нарушения границ используется пороговая процедура, т.е. процедура сравнения энергии или уровня сигнала на каждом датчике с некоторым порогом, а местоположение нарушения определяется по местоположению соответствующего датчика на рубеже охраны, на котором произошло превышение порога.
Классификация объектов по типам человек, животное, транспортное средство и даже летательный аппарат осуществляется путем анализа принятых сейсмоприемниками сигналов в нескольких частотных полосах. При срабатывании порогового устройства в той или иной полосе, в которой возбуждается сейсмосигнал соответствующим объектом, делается вывод о типе обнаруженного объекта. К такому роду средствам обнаружения относится "Сейсмическое устройство обнаружения объектов", патент №2175772, 2001 г.
Недостатком такого рода систем обнаружения является то, что они констатируют только факт нарушения рубежа охраны с выдачей ориентировочного места нарушения по местоположению сейсмодатчика с максимальным уровнем сигнала, но не позволяют оценить даже направление пересечения рубежа.
Такой принципиальной возможностью обладает устройство и способ обнаружения проникновения человека через контур запрещенной зоны (патент №2209467, 2003 г.), которое является наиболее близким к заявляемому и выбрано в качестве прототипа.
Изобретение относится к охранной технике и может использоваться при защите открытых территорий от несанкционированного доступа людей. Устройство обнаружения нарушителя при попытке пересечения рубежа запрещенной зоны состоит из расположенных по контуру на расстоянии 8-10 м друг от друга выносных приемников сейсмических сигналов, соединенных с центральной аппаратурой поста наблюдения протяжным кабелем, причем приемники объединены группами по два или по три, а для передачи сигнала от каждого приемника используется по две отдельные жилы кабеля. Выносные приемники включают в себя сейсмические датчики, например геофоны с преимущественной чувствительностью к вертикальной составляющей колебаний сейсмического поля, и усилители. Двухрядная установка сейсмоприемников по контуру позволяет определять сторону, с которой нарушитель приближается к контуру, а их расположение в вершинах равнобедренного прямоугольника, катет которого параллелен линии рубежа - угол между направлением на цель и линией контура. Обнаружение нарушителя происходит в результате последовательных процедур частотной фильтрации - сначала в диапазоне 5-100 Гц, а затем в более узком диапазоне, характерном для данной конкретной местности.
Способ обнаружения проникновения человека через контур запрещенной зоны в рамках данного технического решения заключается в том, что при использовании групп сейсмических приемников, каждая из которых включает в себя по три установленных в вершинах равнобедренного прямоугольного треугольника приемника сейсмических сигналов, по величине и знаку отношения значения временной задержки между моментами регистрации сигнала приемниками, расположенными по катету, ориентированному вдоль рубежа наблюдения, к значению временной задержки между моментами регистрации сигнала приемниками, расположенными в направлении другого катета, ориентировочно определяют угол между направлением на цель и линией рубежа, при этом по изменению значений временных задержек определяют факт движения нарушителя.
Однако данное техническое решение может дать только ориентировочное направление на нарушителя, практически, с точностью только до одного квадранта относительно местоположения группы приемников, что в большинстве типичных случаев будет приводить к возникновению большого количества ложных тревог, в частности при расположении границ охраняемой зоны вблизи дорог или пешеходных троп. Точность же определения места пересечения границ охраняемой зоны или соответственно рубежа наблюдения будет определяться пространственным интервалом расстановки групп приемников. Такая степень неопределенности в информации о нарушителе существенно затрудняет дальнейшие действия службы охраны, направленные на выяснение обстоятельств нарушения границ охраняемой зоны.
Целью настоящего изобретения является повышение помехоустойчивости способа обнаружения, расширение зоны наблюдения и обеспечение возможности оценки текущих координат нарушителя в пределах зоны наблюдения.
Поставленная цель достигается тем, что, решение об обнаружении нарушителя принимают при превышении установленного порога уровнем взаимной корреляции сигналов одного приемника к сигналам, по крайней мере, трех других приемников, относительные задержки Δtij сигналов на приемниках оценивают по положению максимумов взаимно корреляционных функций и по известным координатам (хi, yi) приемников вычисляют текущие координаты (х, у) нарушителя путем решения систем уравнений вида

Попарная корреляционная обработка сигналов пространственно разнесенных приемников и использование в качестве параметра обнаружения уровня взаимной корреляции сигналов сейсмических приемников обеспечивает возможность увеличения дальности обнаружения нарушителя по сравнению с пороговым энергетическим обнаружением на одиночном приемнике.
Максимальная корреляция сигналов будет практически всегда наблюдаться на приемниках, прилегающих к ближайшим по отношению к текущему местоположению нарушителя приемниках, что обеспечивает практически равномерную и максимальную ширину зоны обнаружения.
Использование взаимно корреляционных функций для оценок относительных задержек сигналов обеспечивает существенно более высокую точность этих оценок по сравнению с вычислением задержек по оценкам времен прихода сигналов на отдельные приемники.
Получение относительных задержки сигналов на четырех приемниках и дальнейшее решение указанной системы уравнений обеспечивают возможность оценки текущих координат нарушителя даже без знания скорости распространения сейсмического сигнала, что принципиально невозможно сделать при использовании способа прототипа.
Оценка текущих координат источника сигнала обеспечивает возможность построения трассы перемещения нарушителя, что существенно облегчает задачу службы охраны по его нейтрализации.
Совокупность признаков предлагаемого технического решения, а именно использование уровня взаимной корреляции сигналов на нескольких приемниках в качестве параметра обнаружения с одновременной оценкой относительных задержек сигналов по положению максимумов взаимно корреляционных функций и решение систем уравнений указанного вида для оценки текущих координат нарушителя обладает новизной и является существенной, поскольку, с одной стороны, ни в одном техническом решении из обнаруженных аналогов она не присутствует, а с другой стороны, обеспечивает возможность достижения положительного эффекта.
Осуществление изобретения.
Техническая реализация.
Вариант устройства с аналоговой системой передачи информации, реализующего предлагаемый способ обнаружения и определения текущего местоположения нарушителя охраняемой зоны представлено на фиг.1.
Устройство состоит из:
- приемников сейсмических сигналов - 1;
- многожильной кабельной линии связи - 2;
- блока фильтрации - 3;
- блока цифровой обработки - 8,
состоящего из:
- многоканального АЦП - 4;
- блока оценки корреляционных функций - 5;
- вычислительного блока - 6;
- устройства отображения информации - 7;
- блока питания - 9;
- поста наблюдения - 10.
Устройство работает следующим образом. Сигналы с приемников сейсмических сигналов 1 по отдельным жилам кабельной линии связи 2 поступают на вход блока усиления и фильтрации 3 аппаратуры поста наблюдения 10. После усиления и низкочастотной фильтрации сигналы каждого приемника сейсмических сигналов поступают на соответствующий вход блока многоканального аналого-цифрового преобразования 4, где осуществляется аналого-цифровое преобразование сигналов с частотой дискретизации, превышающей, по крайней мере, удвоенную частоту среза фильтров нижних частот, использующихся в блоке усиления и фильтрации 3. Далее оцифрованные сигналы поступают в цифровой блок оценки корреляционных функций 5, где осуществляется их дополнительная фильтрация и взаимно корреляционная обработка, производится процедура обнаружения нарушителя путем оценки уровня взаимной корреляции сигналов приемников и оцениваются относительные задержки. Оценки относительных задержек сигналов поступают в блок вычислительный 6, где решается система уравнений и определяются координаты точки излучения, которые далее поступают на устройство отображения 7.
Экспериментальная проверка.
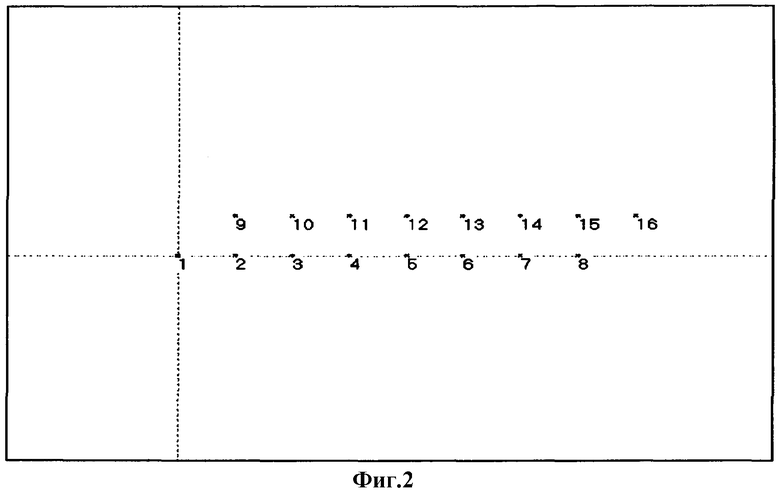
Экспериментальная проверка способа обнаружения и позиционирования применительно к рубежному сейсмическому средству охраны проводилась с использованием 16-ти элементной сейсмической косы с аналоговой системой передачи сигналов от каждого сейсмоприемника до устройства обработки информации. В качестве источников сейсмической информации использовались геофоны GS-20DX Уфимского производства. Информация от каждого датчика в соответствии с фиг.1 по витой паре передавалась через блок усиления и фильтрации на АЦП и далее вводилась в компьютер. На фиг.2 представлена конфигурация расположения сейсмоприемников в косе.
Приемники были выложены в две линии по восемь приемников в линии. Расстояние между приемниками в линии 8 метров.
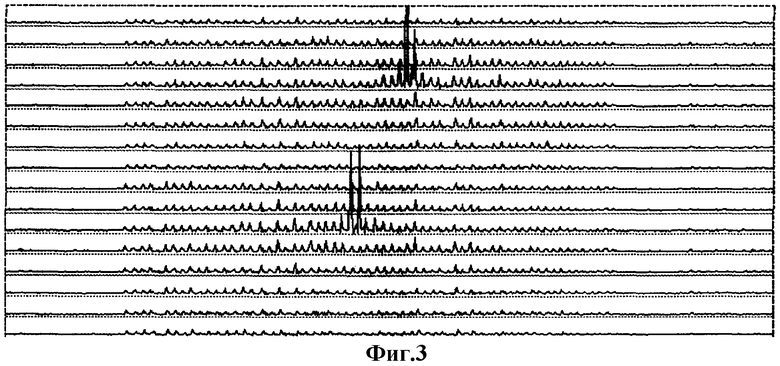
На фиг.3 представлен фрагмент многоканальной реализации в процессе прохождения импровизированного рубежа «нарушителем», который начал свое движение снизу по направлению к линии приемников метров с 50-ти от нее, пересекал ее и удалялся на расстояние 50-ти метров в другую сторону.
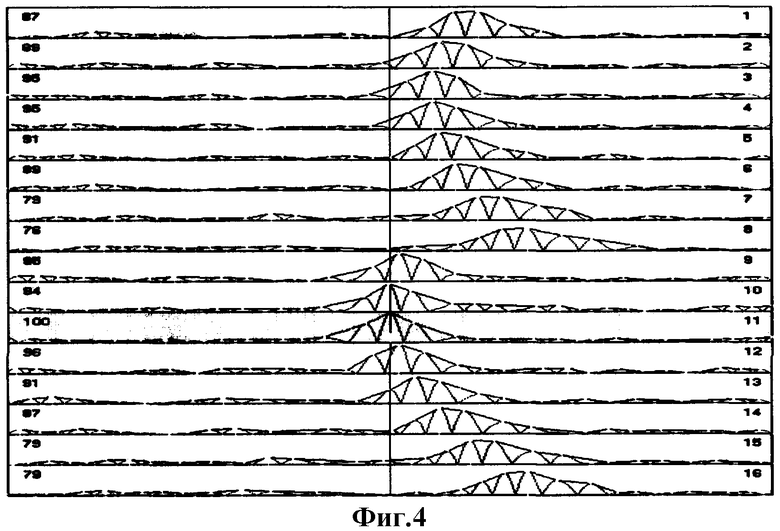
На фиг.4 представлены результаты расчета взаимно корреляционных функций сигналов приемных элементов относительно 11-го приемного элемента, полученные в результате обработки текущей выборки длительностью Т=0.5 с.
Цифрами на фиг.4 отмечены уровни корреляции сигналов приемников с сигналами 11-го приемника. Видно, что уровни корреляции сигналов составляют величины 0.8-0.9 и даже более.
В максимумах корреляционных функций, уровни которых превышали заданный порог (0.8), производилась оценка относительных задержек сигналов и далее путем решения системы уравнений оценивались координаты источника излучения, которые отображались на экране монитора.
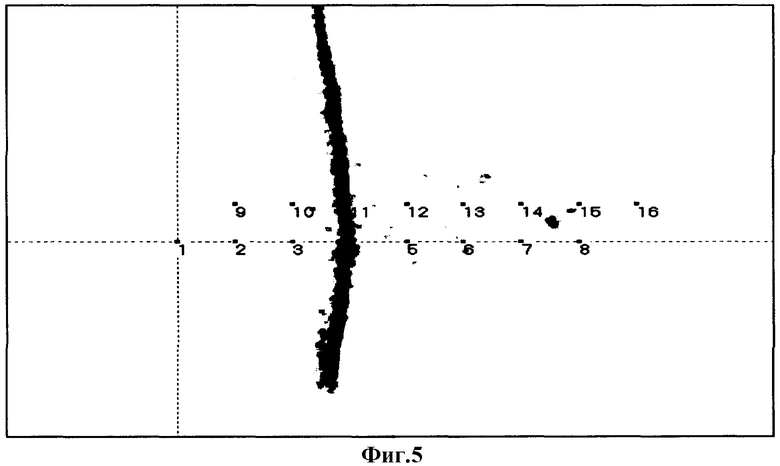
В результате на экране монитора в процессе последовательного отображения текущих координат цели автоматически строилась трасса цели, представленная на фиг.5.
Из представленных результатов видно уверенное обнаружение «нарушителя» и его сопровождение. В данном эксперименте координаты нарушителя уверенно определялись на всей 100-метровой ширине заданной зоны охраны в любом месте нахождения в ней нарушителя и строилась трасса его перемещения. Дальность обнаружения и сопровождения цели в других экспериментах достигала 100-150 метров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов | 2017 |
|
RU2650703C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| КЛАСТЕРНАЯ СИСТЕМА МОНИТОРИНГА ПЕРИМЕТРОВ И ТЕРРИТОРИЙ ОБЪЕКТОВ | 2015 |
|
RU2601164C2 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| СЕЙСМИЧЕСКИЙ ДАТЧИК ОХРАНЫ | 2014 |
|
RU2594931C2 |
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОПЫТОК ПРОНИКНОВЕНИЯ НА ОХРАНЯЕМУЮ ТЕРРИТОРИЮ | 2008 |
|
RU2394277C2 |
Изобретение относится к охранной технике и может использоваться при защите открытых территорий от несанкционированного доступа. Технический результат - повышение помехоустойчивости способа обнаружения, расширение зоны наблюдения и обеспечение возможности оценки текущих координат нарушителя в пределах зоны наблюдения. Данный технический результат достигается за счет того, что сигналы сейсмических приемников, расположенных по контуру охраняемой зоны, подвергают усилению, фильтрации и взаимно корреляционной обработке, принимают решение об обнаружении нарушителя при превышении установленного порога уровнем взаимной корреляции сигнала одного приемника с сигналами, по крайней мере, трех других приемников, оценивают относительные задержки сигналов на этих четырех приемниках по положению максимумов взаимно корреляционных функций и по известным координатам этих приемников вычисляют текущие координаты нарушителя. 5 ил.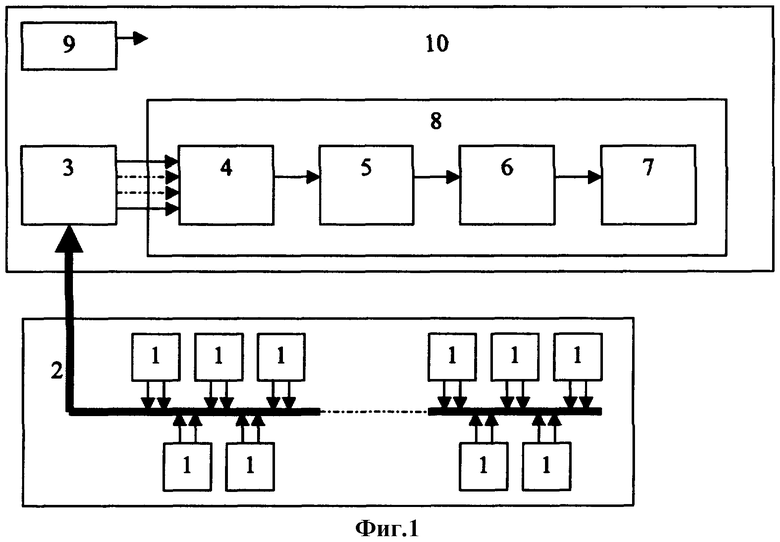
Способ обнаружения и определения текущего местоположения нарушителя границ охраняемой зоны, заключающийся в приеме, фильтрации и оценке относительных задержек сигналов приемников сейсмических сигналов, расположенных по контуру охраняемой зоны, отличающийся тем, что осуществляют попарную корреляционную обработку упомянутых сигналов и решение об обнаружении нарушителя принимают при превышении установленного порога уровнем взаимной корреляции сигнала одного приемника с сигналами, по крайней мере, трех других приемников, оценивают относительные задержки сигналов, по крайней мере, на этих четырех приемниках по положению максимумов взаимно-корреляционных функций и по известным координатам этих приемников и полученным оценкам относительных задержек сигналов вычисляют текущее местоположение нарушителя.
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2000 |
|
RU2175772C1 |
| RU 2066476 С1, 10.09.1996. | |||

