Изобретение относится к области охранной сигнализации, в частности к сейсмическим средствам тревожной сигнализации, предназначенным для обнаружения наземного объекта, проникающего через зону обнаружения рубежа охраны, с возможностью определения азимута на обнаруженный объект по сейсмическим сигналам.
Общеизвестны способы и сейсмические устройства обнаружения и пеленгации объектов при охране протяженных участков местности, территорий и подступов к охраняемым объектам. На протяженных рубежах охраны в качестве чувствительного элемента используют сейсмолинии или сейсмические косы, в состав которых входит группа установленных в грунт вдоль рубежа охраны приемников сейсмических сигналов, каждый из которых соединен отдельной проводной линией связи, а все линии связи объединены в общий многожильный кабель. К подобным устройствам можно отнести, например, известное устройство, описанное в «Способе обнаружения и определения текущего местоположения нарушителя охраняемой зоны» по патенту RU №2311686, МПК G08B 13/00, опубликованному в 2007 г. Данное устройство содержит пост наблюдения и группу приемников сейсмических сигналов, соединенных общей многожильной кабельной линией связи. Пост наблюдения состоит из блока фильтрации и блока цифровой обработки информации, который содержит многоканальный АЦП, блок оценки корреляционных функций, вычислительный блок и устройство отображения информации. В соответствии с указанным способом в устройстве осуществляется попарная корреляционная обработка сейсмических сигналов и принимается решение об обнаружении нарушителя при превышении установленного порога уровнем взаимной корреляции сигнала одного приемника с сигналами, по крайней мере, трех других приемников и оценивают относительные задержки сигналов, по крайней мере, на четырех приемниках по положению максимумов взаимно-корреляционных функций и вычисляют текущее положение нарушителя.
Сходными существенными признаками заявленного и вышеупомянутого устройства являются: приемники сейсмических сигналов, вычислительный блок и устройство отображения информации.
Недостатком данного устройства является громоздкость сейсмической косы из-за использования многожильной кабельной линии связи и низкая его ремонтопригодность (и, как следствие, высокая стоимость проведения ремонта, связанная с необходимостью демонтажа из грунта полного комплекта изделия), а также низкая точность определения азимута обнаруженного объекта.
Другой способ обнаружения и сейсмической пеленгации описан в известном «Способе распознавания сейсмического события и сейсмическом детекторе для его осуществления» по патенту RU №2475779, МПК G01V 1/16, G08B 21/10, опубликованному в 2013 г. Устройство, реализующее данный способ, содержит несколько пар сейсмических сенсоров, соответствующее количество блоков обработки пары сигналов, логический блок, многоканальный интегратор и блок вычисления угла на источник сейсмического события. Каждый блок обработки пары сигналов, в свою очередь, содержит два канала последовательно соединенных аналого-цифровых преобразователей и полосовых фильтров, вычислитель взаимно-корреляционной функции и два интегрирующих фильтра.
Сходными существенными признаками заявленного и вышеупомянутого устройства являются: сейсмические сенсоры и блок вычисления угла на источник сейсмического события.
Недостатками устройства являются недостаточная точность определения азимута обнаруженного объекта и избыточное количество в устройстве требуемых элементов для решения задачи.
Все упомянутые недостатки частично устраняются в другом, наиболее близком по технической сущности к заявленному изобретению, известном «Сейсмическом локаторе наземных объектов», описанным в патенте RU №2536087, МПК G01V 1/16, G08S 15/88, опубликованном в 2014 г.
Устройство содержит три сейсмических приемника, три линии задержек, две из которых имеют по n выходов, 2n корреляторов, два решающих устройства, вычислитель азимута, вычислитель скорости сейсмической волны и вычислитель расстояния.
Основным информационным признаком для определения направления на объект является функция взаимной корреляции сигналов в двух каналах обработки сигналов. По величинам задержек сигнала принимается решение о величине азимута на объект. Данное устройство обеспечивает измерение азимута обнаруженного объекта с помощью вычислителя азимута, который рассчитывает значение угла по определенной формуле.
Общими существенными признаками с заявляемым решением являются: три сейсмических приемника, три линии задержек, решающие устройства и вычислитель азимута.
Недостатком устройства является недостаточная точность определения азимута обнаруженного объекта.
Целью настоящего изобретения является повышение точности определения азимута обнаруженного объекта.
Для достижения этой цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи, которые позволяют повысить точность определения азимута обнаруженного объекта.
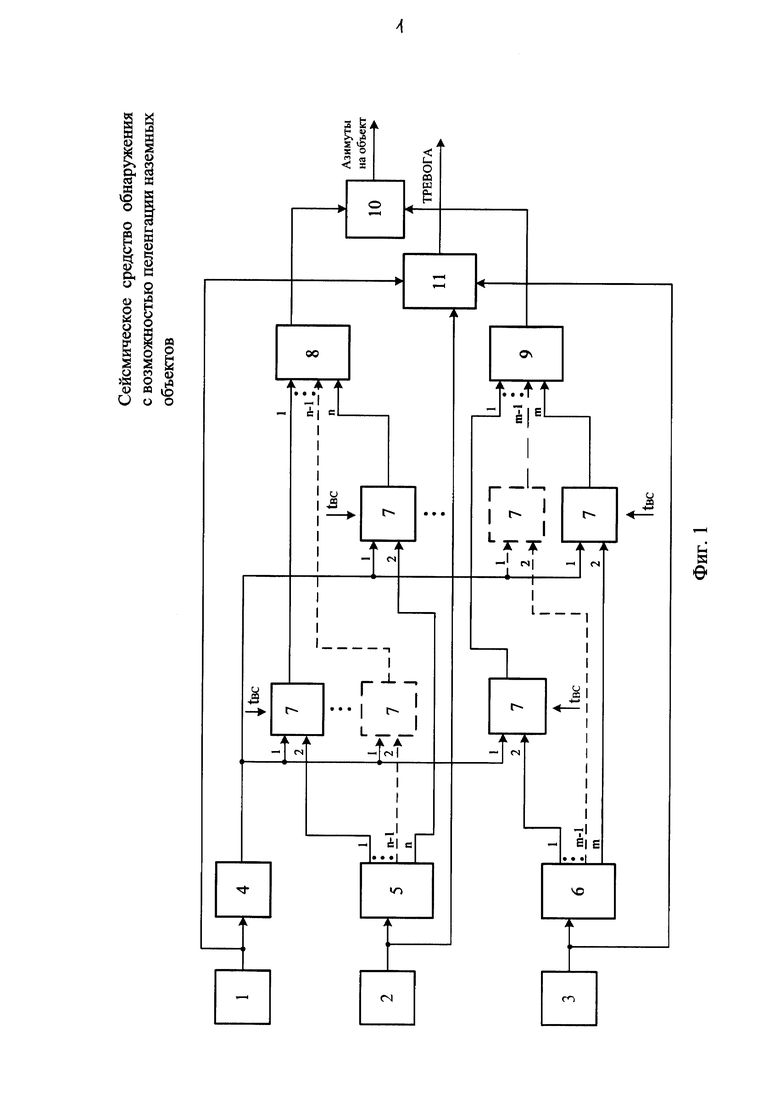
Повышение точности определения азимута обнаруженного объекта достигнуто в предлагаемом сейсмическом средстве обнаружения с возможностью пеленгации наземных объектов, которое содержит первый, второй и третий сейсмические приемники, подключенные соответственно к входам первой, второй и третьей линиям задержек, первое и второе решающие устройства и вычислитель азимута, входы которого соединены с выходами первого и второго решающего устройства, а выход является указателем азимутов на движущийся объект, первый, второй и третий сейсмические приемники размещены в пространстве под углом 120° в вершинах равностороннего треугольника, в устройство дополнительно введены первая группа с числом n и вторая группа с числом m селекторов минимальной разности сигналов, а также вычислительный блок, причем выход первой линии задержки подключен к первым входам первой группы (n) и первым входам второй группы (m) селекторов минимальной разности сигналов, n выходов второй линии задержки подключены ко вторым входам первой группы (n) селекторов минимальной разности сигналов, выходы которых подключены к соответствующим n входам первого решающего устройства, m выходов третьей линии задержки подключены ко вторым входам второй группы (m) селекторов минимальной разности сигналов, выходы которых подключены к соответствующим m входам второго решающего устройства, выходы первого, второго и третьего сейсмического приемника подключены соответственно к первому, второму и третьему входам вычислительного блока, выход которого является указателем сигнала тревоги. Каждый из селекторов минимальной разности сигналов первой (n) и второй (m) группы содержит последовательно соединенные вычитатель и интегратор.
Сущность изобретения поясняется фиг. 1-4, на которых изображено следующее.
На фиг. 1 приведена структурная схема сейсмического пеленгатора наземных объектов, где введены обозначения: первый сейсмический приемник - 1, второй сейсмический приемник - 2, третий сейсмический приемник - 3, первая линия задержки - 4, вторая линия задержки - 5, третья линия задержки - 6, селекторы минимальной разности сигналов - 7, первое решающее устройство - 8, второе решающее устройство - 9, вычислитель азимута - 10, вычислительный блок -11.
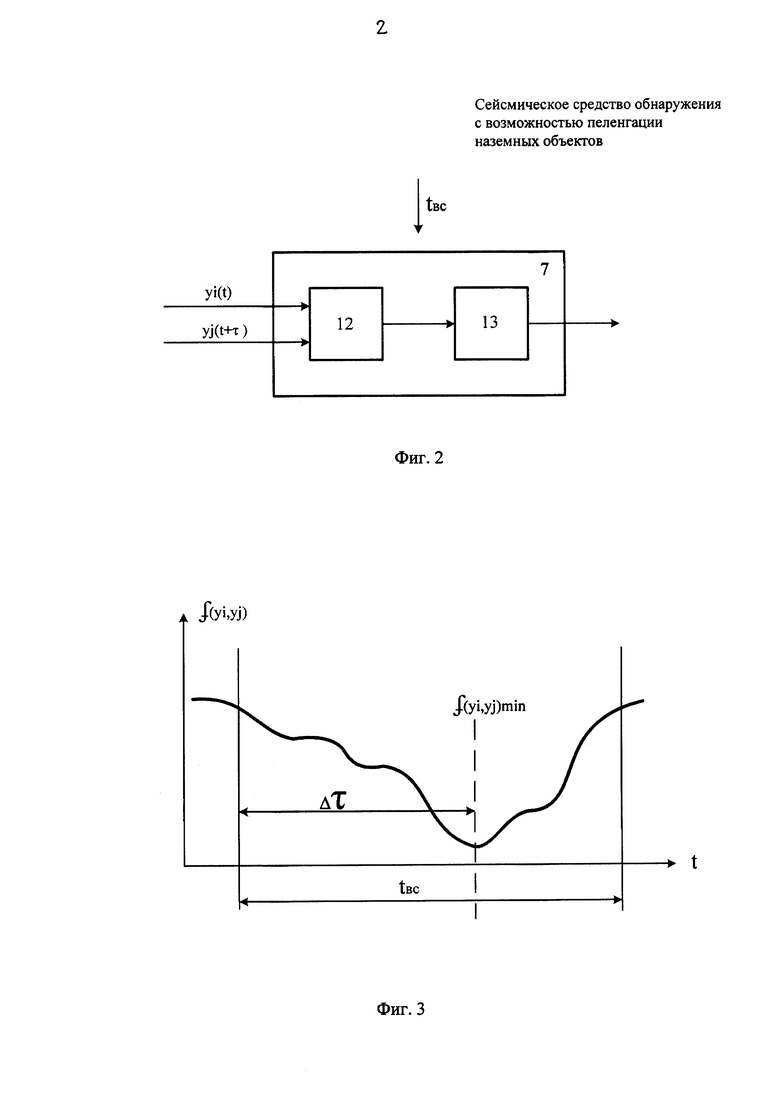
На фиг. 2 приведена функциональная схема селектора минимальной разности сигналов 7, где введены обозначения: вычитатель - 12 и интегратор - 13.
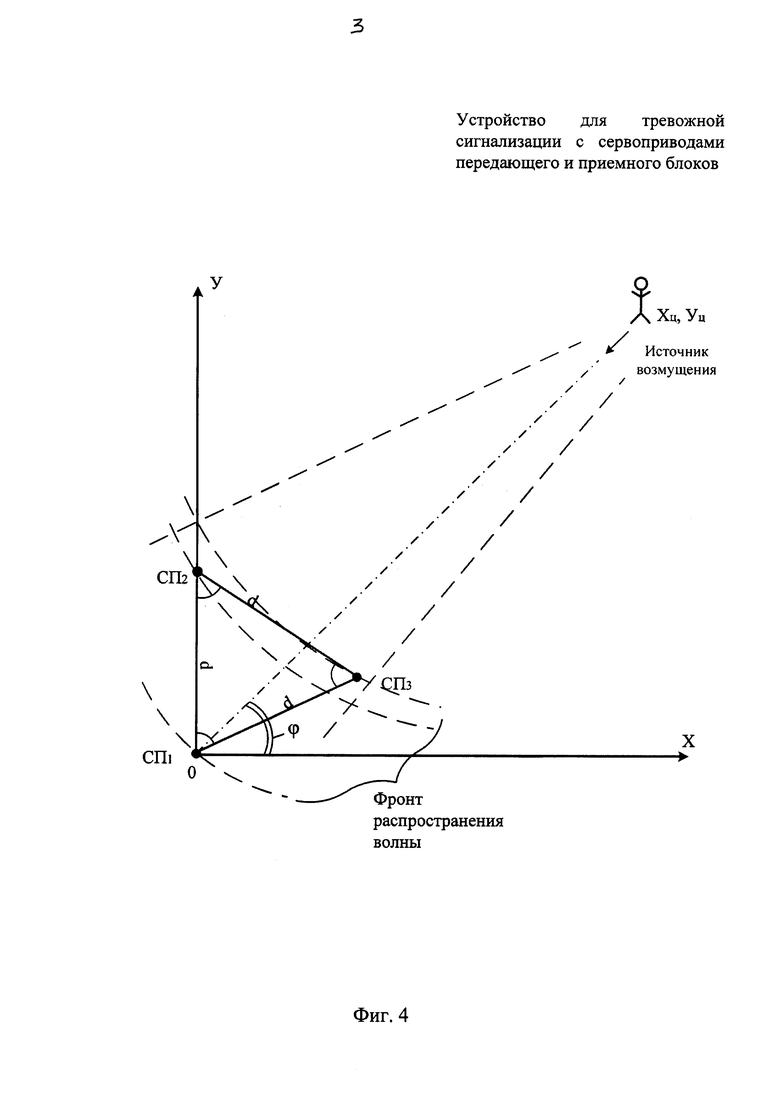
На фиг. 3 приведен пример графика изменения функции разности сигналов с фиксацией минимального значения во временном интервале и соответствующей ему временной задержке.
На фиг. 4 приведена схема размещения сейсмических приемников на местности.
Известно, что повышение точности определения азимута обнаруженного объекта можно осуществить путем увеличения числа n выходов линий задержек и n корреляторов в канале обработки информации. Однако это увеличение может быть ограничено сложностью вычислительного процесса, что соответствует увеличению времени вычисления и увеличению энергопотребления устройства.
С целью упрощения вычислительного процесса работа предлагаемого устройства основана на использовании вместо корреляторов, реализующих функцию умножения, селекторов минимальной разности сигналов с функцией вычитания. Предлагаемая замена позволяет при заданном времени вычисления и определенном энергопотреблении устройства увеличить число выходов линий задержек и селекторов минимальной разности сигналов n и m в первой и во второй группах, что обеспечивает повышение точности определения азимута обнаруженного объекта.
Устройство работает следующим образом.
Первый 1, второй 2 и третий 3 сейсмоприемники на местности располагаются в вершинах равностороннего треугольника (углы 120°) на расстоянии d друг от друга (см. фиг. 4). Для расчета азимута до цели (см. фиг. 1, 4) вычисляются две временные задержки прихода сейсмической волны на две пары сейсмических приемников: пара сейсмических приемников с номерами 1, 2 и пара сейсмических приемников с номерами 1, 3. На фиг. 1 эти сейсмические приемники обозначены соответствующими цифрами. Сейсмические сигналы с выходов сейсмических приемников 1, 2 поступают на вход первого измерителя разности временных запаздываний, состоящего из первой линии задержки 4, второй линии задержки 5, n селекторов минимальной разности сигналов 7 и первого решающего устройства 8. Сейсмические сигналы с выходов сейсмических приемников 1, 3 поступают на вход второго измерителя разности временных запаздываний, состоящего из первой линии задержки 4, третьей линии задержки 6, m селекторов минимальной разности сигналов 7 и второго решающего устройства 9. С выходов первого 8 и второго 9 решающих устройств информация о временных запаздываниях поступает на входы вычислителя азимута 10. По рассчитанным временным задержкам вычислителем азимута 10 определяется азимут на цель в соответствии с формулой:
 ,
,
где Δτ12 и Δτ13 - задержки между сигналами с разных приемников.
В состав каждого селектора минимальной разности сигналов 7 (см. фиг. 2) входят последовательно соединенные вычитатель 12 и интегратор 13. Вычитатель 12 определяет разность двух сигналов yi(t) и yj(t+τ) на временном интервале tвс, где tвс - период обновления времени селекции.
Работа вычитателя 12 проиллюстрирована на фиг. 3. Селектор минимальной разности сигналов 7 определяет минимальное значение функции разности сигналов fmin на временном интервале tвс и фиксирует соответствующее ему значение временной задержки Δτ.
С выходов первого 1, второго 2 и третьего 3 сейсмических приемников сигналы одновременно поступают на входы вычислительного блока 11, в котором происходит их фильтрация и пороговая обработка. Вычислительный блок 11 вычисляет мощности сейсмических сигналов в каждом из трех каналов и, если значения мощностей превышают заданный порог, распознает сейсмическое событие как тревожное с формированием на выходе сигнала «Тревога».
Изменение азимута ϕ во времени означает перемещение цели, что позволяет отслеживать траекторию движения нарушителя. Наличие двух выходных сигналов устройства (сигнала «Тревога» и азимута на объект ϕ) позволяет повысить также и помехоустойчивость устройства, например, в лесистой местности, где присутствует естественный шумовой фактор (например, от раскачивания крон деревьев и их корневых систем при порывах ветра).
Действующий лабораторный макет предлагаемого устройства подвергался всесезонным испытаниям в течение одного года. Была подтверждена устойчивая работоспособность действующего лабораторного макета по обнаружению объекта и определению азимута на обнаруженный объект.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| Способ комбинирования технических средств обнаружения для охраны периметров и территорий объектов | 2018 |
|
RU2697622C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| Интеллектуальная сеть технических средств обнаружения с возможностью функционирования в среде big data для контроля периметров и территорий объектов | 2018 |
|
RU2682013C1 |
| Комбинированная двухрубежная система охраны периметров объектов | 2018 |
|
RU2683186C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
Изобретение относится к области охранной сигнализации, в частности к сейсмическим средствам тревожной сигнализации, предназначенным для обнаружения наземного объекта, проникающего через зону обнаружения рубежа охраны, с возможностью определения азимута на обнаруженный объект по сейсмическим сигналам. Устройство состоит из трех сейсмических приемников, трех линий задержек, двух групп селекторов минимальной разности сигналов (с общим количеством пит соответственно), двух решающих устройств, вычислителя азимута и вычислительного блока. Технический результат - повышение точности определения азимута обнаруженного объекта. 1 з.п. ф-лы, 4 ил.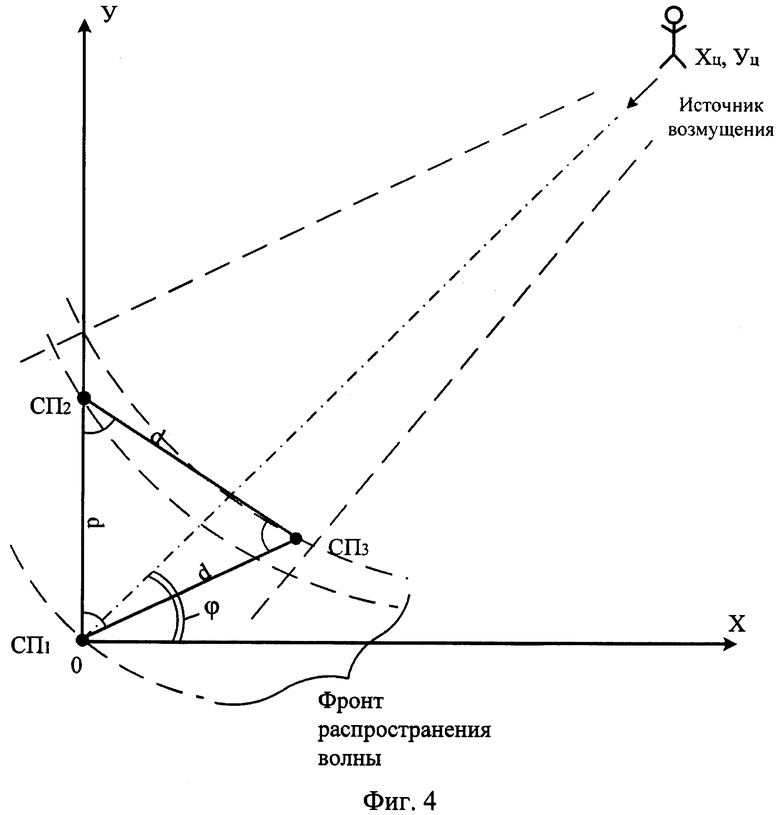
1. Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов, содержащее первый, второй и третий сейсмические приемники, подключенные соответственно к входам первой, второй и третьей линиям задержек, первое и второе решающие устройства и вычислитель азимута, входы которого соединены с выходами первого и второго решающего устройства, а выход является указателем азимутов на движущийся объект, отличающееся тем, что первый, второй и третий сейсмические приемники размещены в пространстве под углом 120° в вершинах равностороннего треугольника, в устройство дополнительно введены первая группа с числом n и вторая группа с числом m селекторов минимальной разности сигналов, а также вычислительный блок, причем выход первой линии задержки подключен к первым входам первой группы (n) и первым входам второй группы (m) селекторов минимальной разности сигналов, n выходов второй линии задержки подключены ко вторым входам первой группы (n) селекторов минимальной разности сигналов, выходы которых подключены к соответствующим n входам первого решающего устройства, m выходов третьей линии задержки подключены ко вторым входам второй группы (m) селекторов минимальной разности сигналов, выходы которых подключены к соответствующим m входам второго решающего устройства, выходы первого, второго и третьего сейсмического приемника подключены соответственно к первому, второму и третьему входам вычислительного блока, выход которого является указателем сигнала тревоги.
2. Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов по п. 1, отличающееся тем, что каждый из селекторов минимальной разности сигналов первой (n) и второй (m) групп содержит последовательно соединенные вычитатель и интегратор.
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| СЕЙСМИЧЕСКИЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2010 |
|
RU2442190C1 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СЕЙСМИЧЕСКОГО СОБЫТИЯ И СЕЙСМИЧЕСКИЙ ДЕТЕКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475779C1 |
| US 3696369 A, 03.10.1972 | |||
| US 4368460 A, 11.01.1983. | |||

