Предлагаемые способ и устройство относятся к радиолокации и могут использоваться для обнаружения живых людей и их останков в завалах, укрытиях, под снегом, а также для дистанционного бесконтактного определения частоты дыхания и частоты сердечных сокращений в медицинских учреждениях.
Известны способы и устройства обнаружения живых людей и их останков (патенты РФ №№2.076.336, 2.116.099, 2.141.119, 2.245.733, 2.260.816; патенты США №№4.958.638, 5.479.120, патент ЕР №0.075.119; Винокуров В.К. и др. Безопасность в альпинизме. - М.: 1983, С.136-137 и другие).
Из известных способов и устройств наиболее близкими к предлагаемому являются "Способ обнаружения живых объектов и устройство для его осуществления" (патент РФ №2.260.816), которые и выбраны в качестве прототипов.
Принцип обнаружения живых объектов заключается в том, что излучают модулированный зондирующий сигнал, принимают отраженный от биообъекта сигнал, перемножают принимаемый и опорный сигналы, выделяют сигнал разностной частоты, осуществляют селекцию по дальности, выделяют спектральные составляющие сигнала разностной частоты, вызванные дыханием и сердечной деятельностью.
При этом выявляются живые объекты, подлежащие быстрому спасению, за счет использования поляризационной селекции и устранения неоднозначности фазовых измерений, что обеспечивается тем, что фазовые измерения осуществляются между отраженными сигналами с правой и левой круговой поляризацией, а не между зондирующим и отраженным сигналами. Причем фазовый сдвиг между отраженными сигналами с правой и левой круговой поляризацией измеряется на стабильной частоте ωг1 первого гетеродина, в качестве которого используется сигнал высокочастотного генератора после соответствующего сдвига по частоте. Поэтому процесс измерения фазового сдвига Δϕ инвариантен к виду модуляции (манипуляции) зондирующего сигнала, к нестабильности амплитуды и несущей частоты отраженного сигнала, возникающих при некогерентном отражении сигнала от биообъектов и их останков и других дестабилизирующих факторах, что позволяет повысить точность измерения фазового сдвига Δϕ, а следовательно, и точность определения местоположения биообъектов и их останков.
Однако в известном способе и устройстве не используется доплеровская частота отраженного сигнала, возникающая при дыхании и сердечной деятельности живого объекта, находящегося в завалах.
Технической задачей изобретения является расширение функциональных возможностей и улучшение эксплуатационных характеристик за счет дополнительного использования доплеровской частоты отраженного сигнала, возникающей при перемещении, результате дыхания и сердечной деятельности живых объектов, находящихся в завалах.
Поставленная задача решается тем, что согласно способу обнаружения живых объектов, заключающемуся в том, что излучают плоскополяризованный модулированный зондирующий сигнал в зону поиска засыпанных биообъектов, принимают сигналы с правой и левой круговой поляризацией, отраженные от биообъекта, изменения амплитуды, фазы и частоты которых несут информацию о перемещениях, дыхании и сердцебиении искомого живого объекта, при этом отраженный сигнал с правой круговой поляризацией стробируют по времени, пропорциональном глубине залегания биообъекта, а отраженный сигнал с левой круговой поляризацией преобразуют по частоте с использованием напряжения первого гетеродина, в качестве которого используют высокочастотный сигнал, сдвинутый по частоте на значение, равное промежуточной частоте ωпр
ωг1=ωс-ωпр,
где ωс - частота отраженного сигнала,
выделяют первое напряжение промежуточной частоты, перемножают его с отраженным сигналом правой круговой поляризации, выделяют гармоническое напряжение на стабильной частоте ωг1 первого гетеродина, ограничивают его по амплитуде, измеряют сдвиг фаз между отраженными сигналами с правой и левой круговой поляризацией на стабильной частоте ωг1 первого гетеродина, сравнивают измеренное значение сдвига фаз с эталонным значением и по результатам сравнения принимают решение о наличии биообъекта в зоне поиска и детальном анализе отраженного от него сигнала, отраженный сигнал с левой круговой поляризацией перемножают с двумя квадратурными опорными сигналами, образующиеся квадартурные сигналы разностной частоты в последовательные моменты времени направляют на вход двух наборов фильтров, подавляющих постоянную составляющую, вызванную отражениями от неоднородных объектов, производят опрос выходов фильтров, производят обработку образующихся сигналов, соответствующую виду модуляции зондирующего сигнала, и реализуют пространственное разрешение, формируют первый и второй сигналы, несущие информацию об изменении амплитуды и фазы отраженного сигнала, соответствующего определенной дальности, выделяют информацию о перемещениях, дыхании и сердцебиении путем анализа этих сигналов, отраженный сигнал с левой круговой поляризацией преобразуют по частоте с использованием напряжения второго гетеродина, частоту ωг2 которого выбирают равной
ωг2=ωc+ωпр,
выделяют второе напряжение промежуточной частоты, перемножают первое и второе напряжения промежуточной частоты между собой непосредственно и после сдвига по фазе на 90° первого напряжения промежуточной частоты выделяют гармоническое напряжение удвоенной доплеровской частоты, сдвинутые друг относительно друга по фазе на 90°, подают их на два входа фазового детектора, выделяют постоянное напряжение положительной или отрицательной полярности, фиксируют его и по амплитуде и частоте смены полярности постоянного напряжения судят о глубине и частоте дыхания и сердцебиения живого объекта.
Поставленная задача решается тем, что устройство для обнаружения живых объектов, содержащее последовательно включенные высокочастотный генератор, направленный ответвитель, импульсный модулятор, второй вход которого соединен с первым выходом генератора модулирующих импульсов, поляризатор и передающую антенну, последовательно включенные первую приемную антенну, первый усилитель высокой частоты, квадратурный демодулятор, гетеродинный вход которого соединен со вторым выходом направленного ответвителя, первый предварительный усилитель, первый полосовой фильтр, первый мультиплексор, вход управления которого через блок управления мультиплексорами соединен с вторым выходом генератора модулирующих импульсов, первый многоканальный полосовой фильтр, первый демультиплексор, вход управления которого через блок управления демультиплексорами соединен с третьим выходом генератора модулирующих импульсов, первый короткозамкнутый электронный ключ, вход управления которого соединен с первым выходом блока цифровой обработки, первый низкочастотный усилитель, аналого-цифровой преобразователь, блок цифровой обработки и блок индикации, последовательно подключенные ко второму выходу квадратурного демодулятора второй ключ, второй вход которого соединен с выходом блока сравнения, второй предварительный усилитель, второй полосовой фильтр, второй мультиплексор, вход управления которого соединен с вторым выходом блока управления мультиплексорами, второй многоканальный полосовой фильтр, второй демультиплексор, вход управления которого соединен с вторым выходом блока управления демультиплексорами, второй короткозамкнутый электронный ключ, вход управления которого соединен с первым выходом блока цифровой обработки, и второй низкочастотный усилитель, выход которого соединен со вторым выходом аналого-цифрового преобразователя, последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, первый ключ, второй вход которого соединен с первым выходом блока управления мультиплексорами, первый перемножитель, второй вход которого соединен с выходом первого усилителя промежуточной частоты, первый узкополосный фильтр, амплитудный ограничитель, первый фазовый детектор, второй вход которого соединен с выходом устройства сдвига частоты, блок сравнения и третий ключ, второй вход которого соединен с выходом первого фазового детектора, а выход подключен ко второму входу блока индикации, последовательно подключенные ко второму выходу направленного ответвителя устройство сдвига частоты, первый смеситель, второй вход которого соединен с выходом первого усилителя высокой частоты, и первый усилитель промежуточной частоты, снабжено вторым гетеродином, вторым смесителем, вторым усилителем промежуточной частоты, фазовращателем на 90°, вторым и третьим перемножителями, вторым и третьим узкополосными фильтрами и вторым фазовым детектором, причем к выходу первого усилителя промежуточной частоты последовательно подключены фазовращатель на 90°, второй перемножитель, второй вход которого соединен с выходом второго усилителя промежуточной частоты, второй узкополосный фильтр и второй фазовый детектор, вход которого соединен с третьим входом блока индикации, к выходу первого усилителя высокой частоты последовательно подключены второй смеситель, второй вход которого соединен с выходом второго гетеродина, второй усилитель промежуточной частоты, третий перемножитель, второй вход которого соединен с выходом первого усилителя промежуточной частоты, и третий узкополосный фильтр, выход которого подключен ко второму входу второго фазового детектора.
На фиг.1 представлена структурная схема устройства, реализующего предлагаемый способ. На фиг.2 изображены временные диаграммы, поясняющие принцип работы устройства. На фиг.3 изображена частотная диаграмма, иллюстрирующая процесс преобразования сигналов по частоте.
Устройство содержит последовательно включенные высокочастотный генератор 1, направленный ответвитель 2, импульсный модулятор 3, второй вход которого соединен с первым выходом генератора 16 модулирующих импульсов, поляризатор 19 и передающую антенну 20, последовательно включенные первую приемную антенну 21, первый усилитель 23 высокой частоты, квадаратурный демодулятор 5, гетеродинный вход которого соединен со вторым выходом направленного ответвителя 2, первый предварительный усилитель 6.1, первый полосовой фильтр 7.1, первый мультиплекусор 8.1, вход управления которого через блок 14 управления мультиплексорами соединен со вторым выходом генератора 16 модулирующих импульсов, первый многоканальный полосовой фильтр 9.1, первый демультиплексор 10.1, вход управления которого через блок 15 управления демультиплексорами соединен с третьим выходом генератора 16 модулирующих импульсов, короткозамкнутый электронный ключ 11.1, вход управления которого соединен с первым выходом блока 17 цифровой обработки, первый низкочастотный усилитель 12.1, аналого-цифровой преобразователь 13, блок 17 цифровой обработки и блок 18 индикации, последовательно подключенные ко второму выходу квадратурного демодулятора 5 второй ключ 28, второй вход которого соединен с выходом блока 34 сравнения, второй предварительный усилитель 6.2, второй полосовой фильтр 7.2, второй мультиплексор 8.2, вход управления которого соединен со вторым выходом блока 14 управления мультиплексорами, второй многоканальный полосовой фильтр 9.2, второй демультиплексор 10.2, вход управления которого соединен со вторым выходом блока 15 управления демультиплексорами, второй короткозамыкающий электронный ключ 11.2, вход управления которого соединен с первым выходом блока 17 цифровой обработки, и второй низкочастотный усилитель 12.2, выход которого соединен со вторым входом аналого-цифрового преобразователя 13, последовательно включенные вторую приемную антенну 24, второй усилитель 25 высокой частоты, первый ключ 26, второй вход которого соединен с первым выходом блока 14 управления мультиплексорами, первый перемножитель 26, второй вход которого соединен с выходом первого усилителя 31 промежуточной частоты, первый узкополосный фильтр 27, амплитудный ограничитель 32, первый фазовый детектор 33, второй вход которого соединен с выходом устройства 29 сдвига частоты, блок 34 сравнения и третий ключ 35, второй вход которого соединен с выходом первого фазового детектора 33, а выход подключен ко второму входу блока 18 индикации, последовательно подключенные ко второму выходу направленного ответвителя 2 устройство 29 сдвига частоты, первый смеситель 30, второй вход которого соединен с выходом первого усилителя 23 высокой частоты, и первый усилитель 31 промежуточной частоты, последовательно подключенные к выходу первого усилителя 31 промежуточной частоты фазовращатель 38 на 90°, второй перемножитель 40, второй вход которого соединен с выходом второго усилителя 39 промежуточной частоты, второй узкополосный фильтр 42 и второй фазовый детектор 44, выход которого соединен с третьим входом блока 18 индикации, последовательно подключенные к выходу первого усилителя 23 высокой частоты второй смеситель 37, второй вход которого соединен с выходом второго гетеродина 36, второй усилитель 39 промежуточной частоты, третий перемножитель 41, второй вход которого соединен с выходом первого усилителя 31 промежуточной частоты, и третий узкополосный фильтр 43, выход которого подключен ко второму входу второго фазового детектора 44.
Передающая антенна 20, первая 21 и вторая 22 приемные антенны образуют антенный блок 4. Передающая антенна 20 излучает зондирующий сигнал с линейной поляризацией. Первая приемная антенна 21 восприимчива к отраженным сигналам с левой круговой поляризацией, а вторая приемная антенна 22 восприимчива к отраженным сигналам с правой круговой поляризацией.
Устройство работает следующим образом.
Высокочастотный генератор 1 формирует зондирующий сигнал (фиг.2,а)
uc(t)=Uccos(ωct+ϕc), 0≤t≤Tc,
где Uc, ωc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность зондирующего сигнала;
который через направленный ответвитель 2 поступает на первый вход импульсного модулятора 3, на второй вход которого с первого выхода генератора 16 модулирующих импульсов подается модулирующий код M(t) (фиг.2, б). На выходе импульсного модулятора 3 формируется фазоманипулированный (ФМн) сигнал (фиг.2, в)
u1(t)=Uccos[ϕct+ϕk(t)+ϕc], 0≤t≤Tc,
где ϕk(t)={0,π} - манипулирующая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (к=1, 2, ..., N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc (Тc=N·τЭ);
который поступает на вход поляризатора 19, где он приобретает плоскую (линейную) поляризацию. Указанный сигнал через передающую антенну 20 излучается в направлении поверхности земли, под которой могут находиться засыпанные биообъекты или их останки.
Обнаружение засыпанных биообъектов или их останков осуществляется оператором путем перемещения перед собой вправо-влево антенного блока 4, укрепленного на штанге, и движением вперед в заданном направлении. При этом необходимо следить за тем, чтобы антенный блок 4 перемещался параллельно обследуемой поверхности на фиксированном расстоянии Н (Н=5...10 км). Скорость перемещения антенного блока 4 выбирается в зависимости от условий поиска и должна быть в пределах 0,1...1,0 м/с. В процессе поиска необходимо чередовать поперечные и продольные перемещения антенного блока 4 таким образом, чтобы после каждого взмаха справа налево или слева направо антенный блок 4 перемещался вперед на расстояние 20 см (на величину своего линейного размера). При этом необходимо следить за тем, чтобы был обследован весь проверяемый участок местности, под поверхностью которой возможно нахождение биообъектов или их останков. При этом в грунте создается электромагнитное поле путем его электромагнитного зондирования. При достижении зондирующим сигналом биообъекта или его останков происходит его частичное отражение в сторону поверхности Земли. Отраженный сигнал улавливается приемными антеннами 21 и 22. При этом приемная антенна 21 восприимчива только к отраженному сигналу с левой круговой поляризацией, а приемная антенна 22 - только к отраженному сигналу с правой круговой поляризацией (вращение вектора электромагнитного поля против часовой стрелки).
На выходах усилителей 23 и 24 высокой частоты образуются следующие сигналы:
uл(t)=Uл(t)cos[(ωct±Δω)t+ϕk(t)+ϕ1],
uп(t)=Uп(t)cos[(ωct±Δω)t+ϕk(t)+ϕ2], 0≤t≤Тc,
где - индекс "л" и "п" относятся соответственно к отраженным сигналам с левой и правой круговой поляризацией;
±Δω - нестабильность несущей частоты, обусловленная некогерентным отражением и другими дестабилизирующими факторами;
UЛ(t), UП(t) - огибающие сигналов с левой и правой круговой поляризацией.
Отраженный сигнал uп(t) с выхода усилителя 24 высокой частоты через ключ 25 поступает на первый вход перемножителя 26. Чтобы измеряемая разность фаз соответствовала глубине h залегания биообъекта, перемножитель 26 стробируется по времени с помощью ключа 25, на управляющий вход которого поступают стробирующие импульсы, формируемые блоком 14 управления мультиплексорами. Временная задержка импульсов определяется глубиной h залегания биобъектов в грунте. При изменении глубины меняется и время задержки.
Отраженный сигнал uл(t) с выхода усилителя 23 высокой частоты поступает на первый вход смесителя 30, на второй вход которого подается напряжение с выхода устройства 29 сдвига частоты. Используемое в качестве первого гетеродинного напряжения (фиг.2, г)
uг1(t)=Uг1cos(ωг1+ϕг1),
где ωг1=ωc-ωпр,
ωпр - промежуточная частота (фиг.3).
На выходе смесителя 30 образуются напряжения комбинационных частот. Усилителем 31 выделяется напряжение промежуточной (разностной) частоты
uпр1(t)=Uпр1(t)cos[(ωпр±Δω)t+ϕk(t)+ϕпр1], 0≤t≤Тc,
где  ;
;
K1 - коэффициент передачи смесителя;
ωпр=ωс-ωг1 - промежуточная частота;
ϕпр1=ϕг-ϕг1,
которое поступает на второй вход перемножителя 26. На выходе последнего образуется гармоническое напряжение (фиг.2, е)
u2(t)=U2(t)cos(ωг1t+ϕг1+Δϕ), 0≤t≤Тc,
где  ;
;
K2 - коэффициент передачи перемножителя;
Δϕ=ϕ2-ϕ1 - разность фаз между отраженными сигналами с правой и левой круговой поляризацией;
которое выделяется узкополосным фильтром 27 и поступает на вход амплитудного ограничителя 32. На выходе последнего образуется напряжение (фиг.2, е)
u3(t)=U0cos(ωг1t+ϕг1+Δϕ), 0≤t≤Тc,
где U0 - порог ограничения,
которое поступает на первый вход фазового детектора 33, на второй вход которого подается напряжение uг1(t) с выхода устройства 29 сдвига частоты. На выходе последнего образуется постоянное напряжение
uн(Δϕ)=UнcosΔϕ,
где 
K3 - коэффициент передачи фазового детектора;
пропорциональное измеряемому сдвигу фаз Δϕ. Это напряжение сравнивается с блоке 34 сравнения с эталонным напряжением
uЭ(t)=UЭcosΔϕЭ,
где ΔϕЭ - неизменный фазовый сдвиг, получаемый при зондировании грунта при отсутствии биообъектов.
Сдвиг фаз Δϕ определяется частотой зондирующего сигнала и электрическими параметрами грунта. Этот сдвиг фаз остается неизменным при зондировании грунта в отсутствии биообъектов, поскольку все определяющие его величины остаются постоянными. Поэтому в блоке 34 сравнения хранится эталонное напряжение, соответствующее сдвигу фаз ΔϕЭ при зондировании грунта в отсутствии биообъектов.
Если uн(Δϕ)≈uЭ(ΔϕЭ), то в блоке 34 сравнения не формируется постоянное напряжение.
При зондировании засыпанных биообъектов отраженные сигналы с правой и левой круговой поляризацией частично проходят через биообъекты, имеющие отличные от грунта электрические параметры (большую проводимость и диэлектрическую проницаемость). При прохождении электромагнитной волны через биообъекты изменяется фазовая скорость распространения волны. Когда плоскополяризованная электромагнитная волна отражается от биообъектов, на которые воздействует внешнее магнитное поле Земли, то она разделяется на две независимые составляющие, которые в общем случае имеет эллиптическую поляризацию с противоположными направлениями вращения вектора электромагнитного поля. На частотах дециметрового диапазона обе составляющие имеют круговую поляризацию. Обе волны распространяются и отражаются от биообъектов с различными скоростями, вследствие чего фазовые соотношения между этими волнами изменяются. Это явление обычно называется эффектом Фарадея, из-за которого отраженный сигнал испытывает вращение плоскости поляризации. Угол поворота плоскости поляризации, который определяется разной скоростью распространения и отражения сигналов с правой и левой круговой поляризацией от биообъектов, находится из соотношения:

где ϕ1, ϕ2 - фазовые запаздывания отраженных сигналов с правой (вращение плоскости поляризации по часовой стрелке) и левой (вращение плоскости поляризации против часовой стрелки) круговой поляризации соответственно.
Все это приводит к изменению сдвига фаз и значения выходного напряжения фазового детектора 33. При uн(Δϕ)>uэ(Δ(ϕэ) в блоке 34 сравнения формируется постоянное напряжение, которое поступает на управляющий вход ключа 35, открывая его. В исходном состоянии ключи 25, 28 и 35 всегда закрыты. При этом выходное напряжение uн(Δϕ) фазового детектора 33 поступает на второй вход блока 18 индикации, где и фиксируется. Причем факт регистрации выходного напряжения uн(Δϕ) фазового детектора 33 свидетельствует о наличии биообъекта на данном участке грунта. На этом заканчивается процесс обнаружения засыпанных биообъектов или их останков.
На втором этапе обеспечивается обнаружение живых объектов, используя для этого частоту дыхания и частоту сердечных сокращений, значения которых находится в пределах от единиц до десятков герц. С этой целью постоянное напряжение с выхода блока 34 сравнения поступает на управляющий вход ключа 28, открывая его.
Принцип обнаружения живых объектов допускает применение различных видов модуляции зондирующего сигнала, в том числе импульсную, частотную, фазово-кодовую. В качестве примера описан зондирующий сигнал с фазово-кодовой модуляцией (манипуляцией).
Отраженный сигнал uл(t) с выхода приемной антенны 21 через первый усилитель 23 высокой частоты поступает на первый вход квадратурного демодулятора 5. В качестве гетеродинного сигнала на второй вход этого демодулятора через направленный ответвитель 2 подается сигнал высокочастотного генератора 1. Квадратурные сигналы разностной частоты, действующие на выходах демодулятора 5, поступают непосредственно и через открытый ключ 28 на входы предварительных усилителей 6.1 и 6.2 соответственно, где они усиливаются, а затем поступают на входы полосовых фильтров 7.1 и 7.2. Нижняя полоса частоты пропускания полосовых фильтров определяется частотой следования зондирующих импульсов, а верхняя частота определяется шириной спектра зондирующего сигнала. Сигналы с выходов полосовых фильтров 7.1 и 7.2 поступают на входы мультиплексовров 8.1 и 8.2, которые осуществляют последовательную во времени подачу квадратурных сигналов разностной частоты на входы многоканальных полосовых фильтров 9.1 и 9.2. Блок 14 управления мультиплексорами формирует стробирующий импульс, задержанный относительно зондирующего на время, определяющее начало отсчета дальности, длительность стробирующего импульса равна либо меньше длительности зондирующего импульса.
Многоканальные полосовые фильтры 9.1 и 9.2 подавляют составляющую квадратурных сигналов разностной частоты, вызванную отраженными от неподвижных объектов и останков биообъектов, и выделяют переменную составляющую, вызванную перемещениями, дыханием и сердцебиением живого объекта. Нижняя частота полосы пропускания каждой ячейки многоканального фильтра выбирается порядка 0,1 Гц для пропускания спектральных составляющих, вызванных дыханием.
Сигналы с выходов многоканальных полосовых фильтров 9.1 и 9.2 поступают на входы демультиплексовров 10.1 и 10.2, выполненных на стандартных аналоговых микросхемах, с помощью которых производится опрос выходов ячеек многоканальных полосовых фильтров 9.1 и 9.2 с частотой, задаваемой блоком 15 управления демультиплесорами. Частота опроса каналов многоканальных полосовых фильтров 9.1 и 9.2 выбирается такой, чтобы обеспечить возможность проведения цифровой обработки сигналов, действующих на выходах демультиплексоров 10.1 и 10.2 в реальном масштабе времени. Действующие на выходах демультиплексоров 10.1 и 10.2 сигналы представляют собой растянутые во времени копии переменных составляющих квадратурных сигналов, поступающих на входы мултиплексоров 8.1 и 8.2. Выходы демультиплексоров 10.1 и 10.2 соединены с выходами короткозамыкающих электронных ключей 11.1 и 11.2, осуществляющих программно-управляемый разряд ячеек многоканальных полосовых фильтров 9.1 и 9.2 для устранения переходных процессов, связанных с воздействием сильных кратковременных сигналов, возникающих при перемещении объектов в облучаемой зоне. Сигналы с выходов короткозамыкающих электронных ключей 11.1 и 11.2 поступают на низкочастотные усилители 12.1 и 12.2 и далее на входы аналого-цифрового преобразователя 13, работа которого синхронизирована с работой демультиплексоров 10.1 и 10.2.
Сигнал с выхода аналого-цифрового преобразователя 13 поступает на блок 17 цифровой обработки. В блоке 17 цифровой обработки проводится спектральный анализ квадратурных составляющих сигналов, соответствующих заданной дальности на временном интервале порядка 10...100 с. Амплитудные спектры квадратурных сигналов, соответствующих каждой конкретной дальности, суммируются и выделяются спектральные составляющие, соответствующие дыханию и сердечным сокращениям. Амплитуда выбранных спектральных составляющих сравнивается с пороговыми значениями и принимается решение о том, что обнаруженный в облучаемой зоне биообъект является живым объектом, подлежащим быстрому извлечению из грунта или обломков разрушенного здания. С выхода блока 17 цифровой обработки сигналы поступают в блок 18 индикации.
Для улучшения эксплуатационных характеристик устройства и расширения его функциональных возможностей используется доплеровская частота отраженного сигнала, возникающая при перемещениях, дыхании и сердцебиениях живого объекта.
Для определения значения доплеровской частоты используются два канала приема. Первый канал состоит из последовательно подключенных к выходу усилителя 23 высокой частоты первого смесителя 30, второй вход которого соединен с выходом устройства 29 сдвига частоты, выполняющего роль первого гетеродина, первого усилителя 31 промежуточной частоты, фазовращателя 38 на 90°, второго перемножителя 40, второй вход которого соединен с выходом второго усилителя 39 промежуточной частоты, и второго узкополосного фильтра 42. Второй канал приема состоит из последовательно подключенных к выходу усилителя 23 высокой частоты второго смесителя 37, второй вход которого соединен с выходом второго гетеродина 36, второго усилителя 39 промежуточной частоты, третьего перемножителя 41, второй вход которого соединен с выходом первого усилителя 31 промежуточной частоты, и третьего узкополосного фильтра 43.
Причем частота ωГ1 первого гетеродина (устройства 29 сдвига частоты) выбирается равной (фиг.3)
ωг1=ωс-ωпр,
где ωc - частота принимаемого (отраженного) сигнала;
ωпр - промежуточная частота,
а частота ωг2 второго гетеродина 36 выбирается равной
ωг2=ωс+ωпр,
При наличии эффекта Доплера частота принимаемого сигнала будет равна ωс±ωд, где ωд - частота, обусловленная эффектом Доплера, возникающим при перемещении, дыхании и сердцебиении живого объекта.
Тогда в процессе преобразования на выходах первого смесителя 30 будем иметь
(ωc+ωд)-ωг1=ωпр или ωc-ωг1=ωпр-ωд.
Аналогично на выходе второго смесителя 37 будем иметь
ωг2-(ωc+ωд)=ωпр или ωг2-ωc=ωпр+ωд.
На выходах смесителей 30 и 37, естественно, будут и другие частотные комбинации, но в данном случае интерес представляют только эти.
Напряжения с частотами (ωпр-ωд) и (ωпр+ωд) выделяются усилителями 31 и 39 промежуточной частоты соответственно.
Для простоты рассуждения взят случай, когда частота принимаемого (отраженного) сигнала увеличивается за счет эффекта Доплера.
Напряжения с выходов усилителей 31 и 39 промежуточной частоты поступают на входы третьего перемножителя 41, на выходе которого имеется узкополосный фильтр 43, настроенный на частоту
(ωпр+ωд)-(ωпр-ωд)=2ωд.
Напряжение с выхода усилителя 31 промежуточной частоты, кроме того, через фазовращатель 38 на 90° поступает на первый вход перемножителя 40, на второй вход которого подается напряжение с выхода усилителя 39 промежуточной частоты. Узкополосный фильтр 42, установленный на выходе перемножителя 40, также настроен на частоту 2ωд.
Таким образом, на выходах узкополосных фильтров 42 и 43 формируются напряжения одинаковой частоты, но сдвинутые друг относительно друга на 90°.
Следовательно, когда частота принимаемого сигнала увеличивается за счет эффекта Доплера, на выходе усилителя 31 промежуточной частоты будет выделяться напряжение с частотой
ωс-ωг1=ωпр-ωд,
а на выходе усилителя 39 промежуточной частоты - с частотой
ωг2-ωс=ωпр+ωд,
а когда частота принимаемого сигнала будет уменьшаться за счет эффекта Доплера, на выходе усилителя 31 промежуточной частоты будет выделяться напряжение с частотой
(ωc-ωд)-ωг2=ωпр+ωд,
а на выходе усилителя 39 промежуточной частоты - с частотой
ωг2-(ωс-ωд)=ωпр-ωд.
Подавая напряжения с выходов усилителей 31 и 39 промежуточной частоты на перемножители 40 и 41 соответственно, на выходах узкополосных фильтров 42 и 43 всегда будут присутствовать напряжения с двойной частотой, обусловленной эффектом Доплера. Но так как в процессе преобразования в перемножителях 40 и 41 выделяется всегда разностная частота двух промежуточных частот, то кроме абсолютной величины этой разностной частоты необходимо знать еще и знак этой разности. Для определения знака напряжения с выходов узкополосных фильтров 42 и 43 подаются на входы фазового детектора 44, на выходе которого выделяется постоянное напряжение того или иного знака. Напряжение с выхода фазового детектора 44 со знаком плюс или минус поступает на третий вход блока 18 индикации. Причем амплитуда этого напряжения и частоты смены полярности характеризуют глубину и частоту дыхания и сердечных сокращений живого объекта.
Таким образом, предлагаемые способ и устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивают расширение функциональных возможностей и улучшение эксплуатационных характеристик. Это достигается путем дополнительного использования доплеровской частоты отраженного сигнала, возникающей при перемещении, дыхании и сердечной деятельности живых объектов, находящихся в завалах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2005 |
|
RU2291575C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ БОЛЬНЫХ | 2008 |
|
RU2376929C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В НАПОРНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2305263C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2009 |
|
RU2395121C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |


Предложенный способ и устройство могут использоваться для обнаружения живых людей и их останков в завалах, укрытиях, под снегом, а также для дистанционного бесконтактного определения частоты дыхания и частоты сердечных сокращений в медицинских учреждениях. Технической результат - расширение функциональных возможностей и улучшение эксплуатационных характеристик за счет дополнительного использования доплеровской частоты отраженного сигнала, возникающей при перемещении, дыхании и сердечной деятельности живых объектов, находящихся в завалах. Устройство, реализующее предлагаемый способ, содержит высокочастотный генератор, направленный ответвитель, импульсный модулятор, антенный блок, квадратурный демодулятор, предварительные усилители, полосовые фильтры, мультиплексоры, многоканальные полосовые фильтры, демультиплексоры, короткозамыкающие электронные ключи, низкочастотные усилители, аналого-цифровой преобразователь, блок управления мультиплексорами, блок управления демультиплексорами, генератор модулирующих импульсов, блок цифровой обработки, блок индикации, поляризатор, передающая антенна, приемные антенны, усилители высокой частоты, ключи, перемножители, узкополосные фильтры, устройство сдвига частоты, смесители, усилители промежуточной частоты, амплитудный ограничитель, фазовые детекторы, блок сравнения, второй гетеродин. 2 н.п. ф-лы, 3 ил.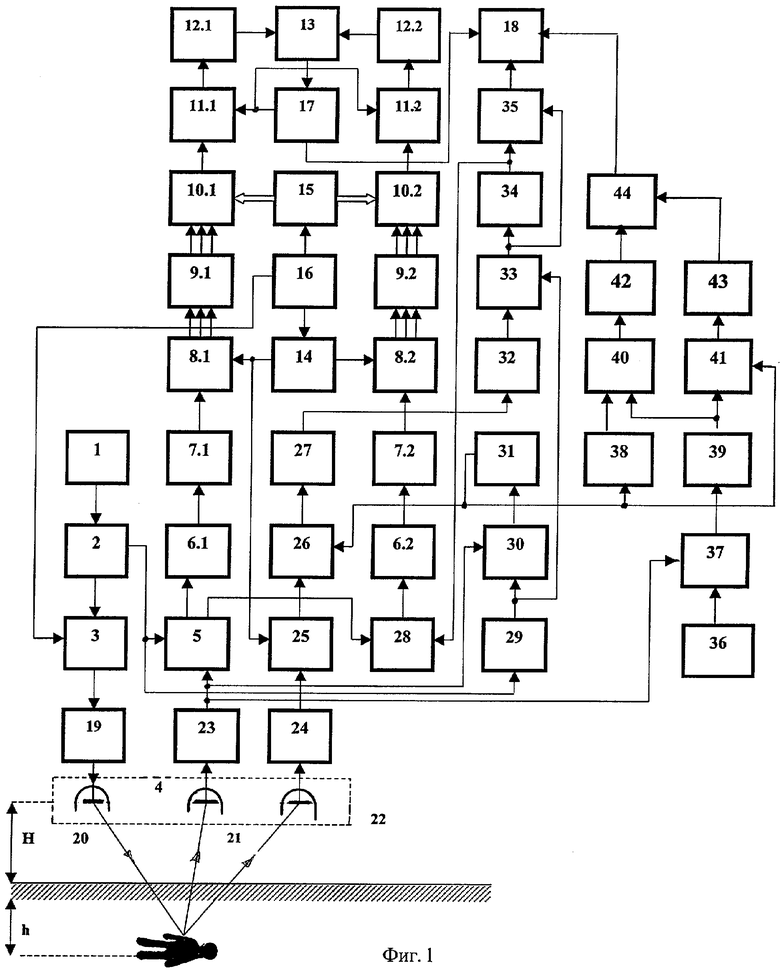
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |
| RU 2003129629 A, 10.04.2005 | |||
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖИВОГО ОБЪЕКТА И МИКРОВОЛНОВЫЙ ЛОКАТОР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2159942C1 |
| RU 94036730 А, 20.02.1998 | |||
| US 4072942, 07.02.1978 | |||
| Пневматический вталкиватель вагонеток | 1948 |
|
SU82491A1 |
| US 4958638, 25.09.1990. | |||

