Предлагаемый способ относится к космической технике и может быть использован на космических аппаратах, находящихся на орбите искусственного спутника Земли, кромке геостационарной, стабилизируемых вращением вдоль вертикальной оси.
Известны способы и системы, использующие космические аппараты для определения местоположения аварийных объектов (патенты РФ №2027195, 2040860, 2059423, 2158003, 2174092, 2177437, 2201601, 2206902, 2240950; патенты США №4161730, 5860842; патенты Германии №4311473, 4322288; Скубко Р.А. и др. Спутник у штурвала. - Л.: Судостроение, 1989-168 с. и другие).
Из известных способов и систем наиболее близким к предлагаемому является «Угломестно-временной доплеровский способ определения координат аварийного объекта» (патент РФ №2174092, В64G 1/10, 1999), который и выбран в качестве прототипа.
По известному способу производят поиск такого пространственного положения приемной антенны спутника при наличии факта работы передатчика аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю. В этот момент измеряют угол между осью приемной антенны и осью датчика горизонта. Координаты подспутниковой точки трассы космического аппарата в момент измерения вычисляются. При этом измерения проводят два раза. По координатам двух подспутниковых точек и двум измерениям указанного угла определяют местоположение аварийного объекта.
Указанный способ обеспечивает однозначное определение и повышение точности вычисления координат аварийного объекта, находящегося на поверхности Земли, а также расширение площади просматриваемой поверхности и увеличение отношения сигнал/шум в приемной радиолинии.
Однако потенциальные возможности способа используются не в полной мере. Данный способ можно использовать и для управления сбросом информации из космического аппарата на наземный пункт управления и уточнения элементов орбиты космического аппарата (КА).
Технической задачей изобретения является расширение функциональных возможностей способа путем управления сбросом информации с КА на наземный пункт управления и уточнения элементов орбиты КА.
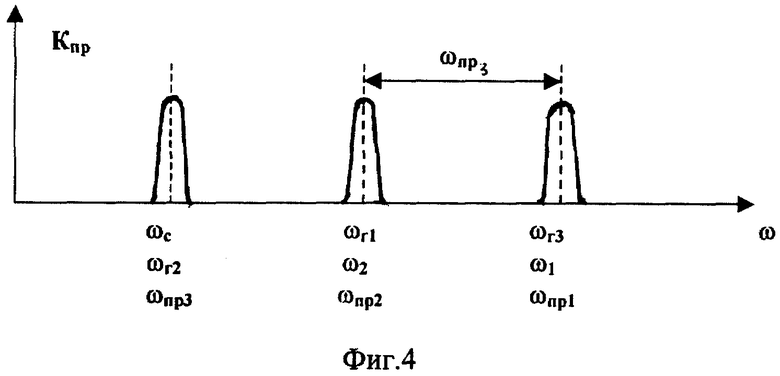
Поставленная задача решается тем, что согласно угломестно-временного доплеровского способа определения координат аварийного объекта, находящегося на поверхности Земли, с помощью космического аппарата, стабилизированного вращением вдоль вертикальной оси, заключающегося в том, что при появлении сигнала передатчика аварийного объекта на просматриваемой с космического аппарата полосе на поверхности Земли измеряют частоту Доплера беззапросным методом, находят пространственное положение космического аппарата в момент, когда частота Доплера принимаемого сигнала равна нулю, измеряют в этот момент времени угол между механической осью приемной антенны космического аппарата и осью датчика горизонта с привязкой измерения к бортовому времени, вычисляют координаты подспутниковой точки в момент указанного измерения, при этом измерения проводят два раза и по координатам двух подспутниковых точек и двум измерениям угла между механической осью приемной антенны космического аппарата и осью датчика горизонта определяют местонахождение аварийного объекта на поверхности Земли, при появлении космического аппарата в зоне приема на наземном пункте управления формируют высокочастотное колебание на частоте ωс, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωс+ωг1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, усиливают на борту космического аппарата, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωг2, манипулируют его по фазе модулирующим кодом, содержащим информацию о местоположении аварийного объекта, формируя тем самым сложный сигнал с фазовой манипуляцией, усиливают его по мощности, излучают в эфир на частоте ω2=ωпр2, улавливают на наземном пункте управления, преобразуют по частоте с использованием частоты ωг3 третьего гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3=ωг3-ωпр2=ωc, умножают его фазу на два, выделяют гармоническое колебание на частоте 2ωпр3, делят его фазу на два, выделяют гармоническое колебание на частоте ωпр3=ωс, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на третьей промежуточной частоте ωпр3, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, сравнивают гармонические колебания на частоте ωс, измеряют частоту Доплера запросным методом и определяют элементы орбиты космического аппарата.
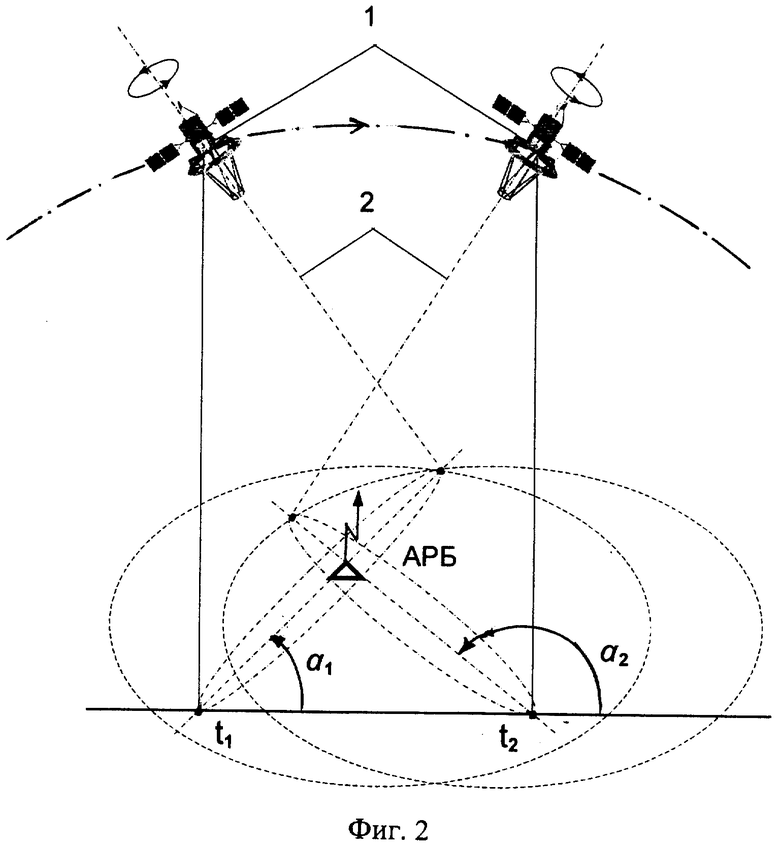
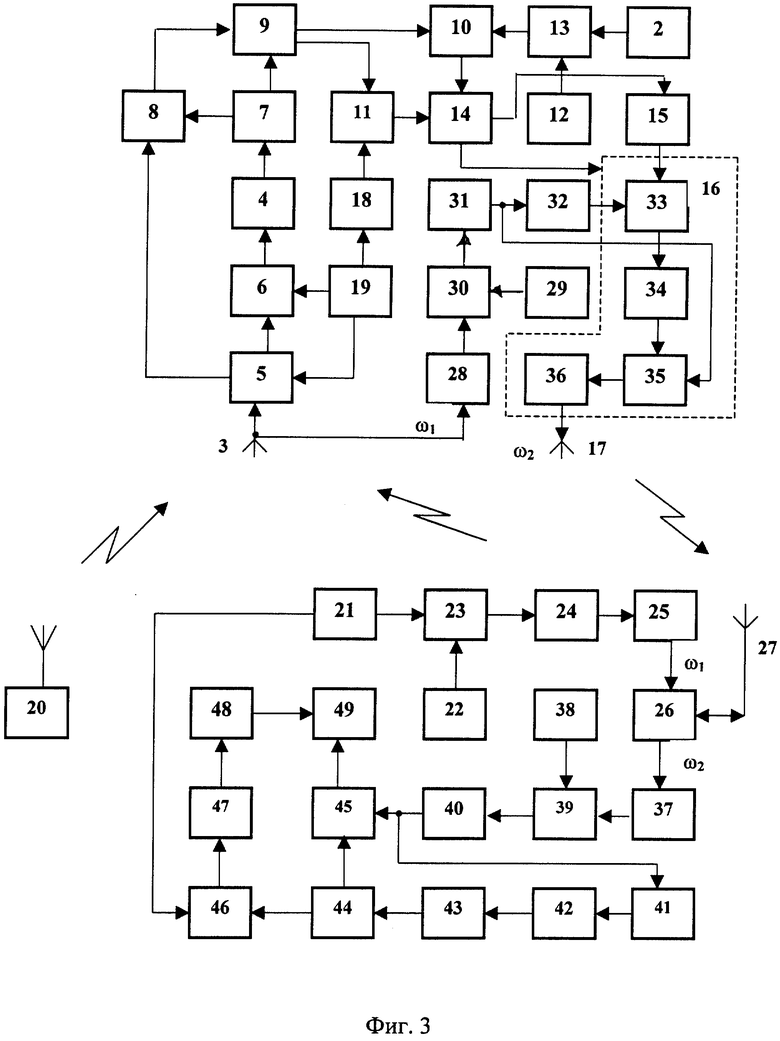
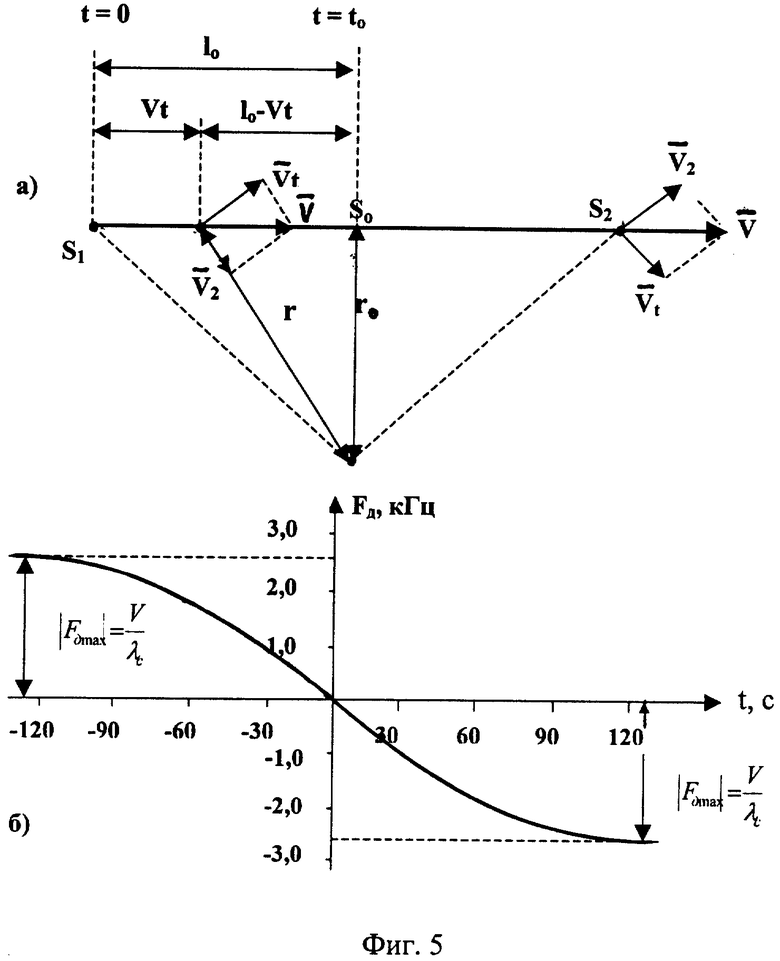
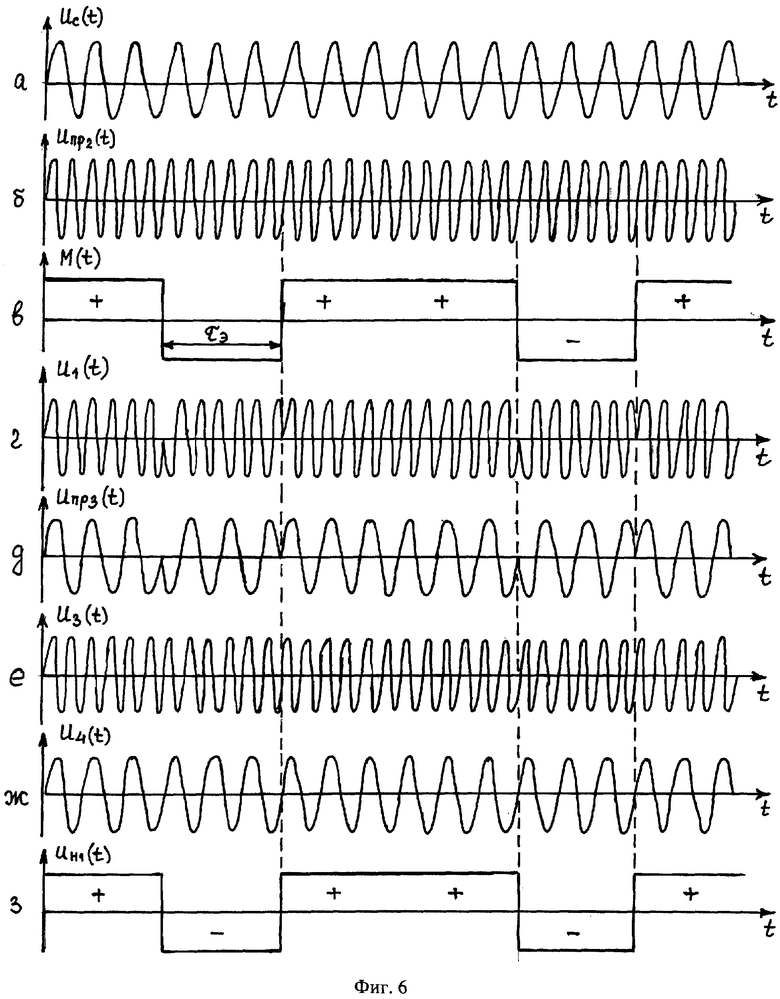
Геометрические схемы расположения КА и аварийного объекта представлены на фиг.1 и 2. Структурные схемы бортовой аппаратуры КА и наземного пункта управления представлены на фиг.3. Частотная диаграмма, поясняющая процесс преобразования сигналов, изображена на фиг.4. Зависимость доплеровской частоты от времени изображена на фиг.5, а, б. Временные диаграммы, поясняющие работу аппаратуры, реализующей предлагаемый способ, показаны на фиг.6.
Аппаратура, размещенная на борту космического аппарата, содержит корпус 1, инфракрасный датчик 2 горизонта, последовательно включенные приемную антенну 3, приемник 5, второй вход которого соединен с выходом задающего генератора 19, измеритель 6 частоты Доплера, второй вход которого соединен с вторым выходом задающего генератора 19, устройство 4 сравнения, заторможенный блокинг-генератор 7, схему И 8, второй вход которой соединен с вторым выходам приемного устройства 5, схему И 9, второй вход которой соединен с выходом блокинг-генератора 7, вентиль 10, второй вход которого через счетчик 13 импульсов соединен с выходом датчика 2 горизонта, и генератор 12 импульсов, схему 14 коммутации, магнитное запоминающее устройство 15, передатчик 16 и передающую антенну 17. К третьему выходу задающего генератора 19 последовательно подключены временное устройство 18 и вентиль 11, второй вход которого соединен со вторым выходом схемы И 9, а выход подключен к второму входу схемы 14 коммутации. Передатчик 16 состоит из ключа 33, фазового манипулятора 35, формирователя 34 модулирующего кода и усилителя 36 мощности. К выходу приемной антенны 3 последовательно подключены усилитель 28 высокой частоты, второй смеситель 30, второй вход которого соединен с выходом второго гетеродина 29, усилитель 31 второй промежуточной частоты, амплитудный детектор 32, ключ 33, второй вход которого соединен с выходом запоминающего устройства 15, формирователь 34 модулирующего кода, фазовый манипулятор 35, второй вход которого соединен с выходом усилителя 31 второй промежуточной частоты, усилитель 36 мощности и передающая антенна 17.
Аппаратура, размещенная на наземном пункте управления, содержит последовательно включенные генератор 21 высокой частоты, первый смеситель 23, второй вход которого соединен с выходом первого гетеродина 22, усилитель 24 первой промежуточной частоты, первый усилитель 25 мощности, дуплексер 26, вход-выход которого связан с приемопередающей антенной 27, третий усилитель 37 мощности, третий смеситель 39, второй вход которого соединен с выходом третьего гетеродина 38, усилитель 40 третьей промежуточной частоты, удвоитель 41 фазы, первый узкополосный фильтр 42, делитель 43 фазы на два, второй узкополосный фильтр 44, фазовый детектор 45, второй вход которого соединен с выходом усилителя 40 третьей промежуточной частоты, и вычислительный блок 49. Ко второму выходу узкополосного фильтра 44 последовательно подключены четвертый смеситель 46, второй вход которого соединен с вторым выходом генератора 21, третий узкополосный фильтр 47 и измеритель 48 частоты Доплера, выход которого соединен с вторым выходом вычислительного блока 49.
Предлагаемый способ осуществляется следующим образом.
Поступательное движение КА, ось вращения которого отклонена от местной вертикали, обеспечивает перемещение линии сканирования диаграммы направленности приемной антенны 3 и последовательный просмотр полосы на поверхности Земли вдоль орбиты КА. Частота вращения КА выбирается из условия просмотра поверхности Земли без пропуска.
Приемная антенна 3 выбирается такой, чтобы ось диаграммы направленности совпадала с механической осью антенны. Для устранения неоднозначности механическая ось приемной антенны 3 космического аппарата сдвигается относительно оси вращения на угол β, равный ширине диаграммы направленности приемной антенны 3.
В исходном состоянии до попадания сигнала с передатчика 20 аварийного объекта в диаграмму направленности приемной антенны 3 на выходе приемника 5 сигнал отсутствует. На выходе схемы И 8 - нуль. Схема совпадения И 9 закрыта, на ее выходах - нуль. Импульсный инфракрасный датчик 2 горизонта в момент пересечения трассы КА вырабатывает импульс, который онуляет счетчик 13 импульсов. С генератора 12 импульсов импульсы поступают на счетчик 13. Вентили 10, 11 - закрыты.
При появлении сигнала с передатчика 20 аварийного объекта в полосе земной поверхности, просматриваемой диаграммой направленности приемной антенны 3, появляется сигнал на выходе приемника 5. На выходе схемы И 8 - единица. При достижении значения частоты Доплера на выходе измерителя 6, равного нулю, открывается устройство 4 сравнения и запускается заторможенный блокинг-генератор 7, на выходах схем И 9 появляется единица. Открываются вентили 10, 11. В этом случае механическая ось приемной антенны 3 находится в точке траверза. В этот момент измеряется значение угла α между осью датчика 2 горизонта и положением механической оси приемной антенны 3. Измерения привязываются к бортовому временному устройств 18 и записываются в магнитное запоминающее устройство 15 через схему 14 коммутации в виде количества импульсов, находящихся в счетчике 13. Координата подспутниковой точки в момент измерений вычисляется. Измерения проводятся не менее двух раз. По координатам двух подспутниковых точек и двум измеренным углам α1 и α2 между механической осью приемной антенны 3 КА и осью горизонта определяется местоположение аварийного объекта.
При срабатывании импульсного датчика 2 горизонта система возвращается в исходное состояние.
При появлении КА в зоне приема на наземном пункте управления включается генератор 21 высокой частоты, который формирует высокочастотное колебание (фиг.6, а)
uс(t)=Uсcos(ωсt+ϕс), 0≤t≤Tс,
где Uс, ωс, ϕс, Tс - амплитуда, несущая частота, начальная фаза и длительность колебания.
Это колебание поступает на первый вход первого смесителя 23, на второй вход которого подается напряжение первого гетеродина 22
uг1(t)=Uг1cos(ωг1+ϕг1).
На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1cos(ωпр1t+ϕпр1), 0≤t≤Tс,
где 
K1 - коэффициент передачи смесителя;
ωпр1=ωс+ωг1=ω1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕс+ϕг1,
которое после усиления в усилителе 25 мощности через дуплексер 26 поступает в приемопередающую антенну 27, излучается в эфир на частоте ω1=ωпр1, улавливается приемной антенной 3 КА и через усилитель 28 высокой частоты поступает на первый вход второго смесителя 30, на второй вход которого подается напряжение второго гетеродина 29
uг2(t)=Uг2cos(ωг2t+ϕг2).
На выходе смесителя 30 образуются напряжения комбинационных частот. Усилителем 31 выделяется напряжение второй промежуточной (разностной) частоты (фиг.6, б)
uпр2(t)=Uпp2cos(ωпp2t+ϕпр2), 0≤t≤Тc,
где  :
:
ωnp2=ωпр1-ωг2=ω2 - вторая промежуточная (разностная) частота;
ϕпр2=ϕпр1-ϕг2,
которое поступает на вход амплитудного детектора 32 и на первый вход фазового манипулятора 35. Амплитудный детектор 32 выделяет огибающую напряжения unp2(t), которая поступает на управляющий вход ключа 33 и открывает его. В исходном состоянии ключ 33 всегда закрыт. При этом информация о значении углов α1, α2 и времени измерения, записанная в магнитное запоминающее устройство 15, через открытый ключ 33 поступает на вход формирователя 34, где формируется модулирующий код M(t) (фиг.6, в).
Этот код подается на второй вход фазового манипулятора 35, на выходе которого образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.6, г)
u1(t)=Uпp2cos[ωпр2t+ϕk(t)+ϕпр2], 0≤t≤Тс,
где ϕk(t)={0, π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.6, в), причем ϕk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (к=1, 2,...,N);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сложный сигнал длительностью Тс (Тс=NτЭ).
Данный сигнал усиливается по мощности в усилителе 36 мощности и излучается передающей антенной 17 в эфир на частоте ω2=ωпр2± Ωд, улавливается приемопередающей антенной 27 и через дуплексер 26 и усилитель 37 мощности поступает на первый вход третьего смесителя 39
u2(t)=Uпр2cos[(ωпр2± Ωд)t+ϕk(t)+ϕпр2], 0≤t≤Tc,
где Ωд - доплеровское смещение частоты;
знак «плюс» соответствует сближению приемника и передатчика, «минус» - удаление, т.е. знак определяет направление вектора радиальной скорости.
На второй вход третьего смесителя 39 подается напряжение третьего гетеродина 38
uг3(t)=Uг3cos(ωг3+ϕг3).
На выходе смесителя 39 образуются напряжения комбинационных частот. Усилителем 40 выделяется напряжение третьей промежуточной (разностной) частот (фиг.6, д)
uпр3(t)=Uпр3cos[(ωпр3± Ωд)t-ϕk(t)+ϕпр3], 0≤t≤Тc,
где  ;
;
ωпр3=ωг3-ωпр2=ωс - третья промежуточная (разностная) частота;
ϕпр3=ϕгЗ-ϕпр2=ϕс.
Это напряжение представляет собой сложный ФМн-сигнал на третьей промежуточной частоте ωпр3 и поступает на первый (информационный) вход фазового детектора 45 и на вход удвоителя 41 фазы.
На выходе удвоителя 41 фазы образуется гармоническое напряжение (фиг.6, е)
u3(t)=U3cos[2(ωпp3± ΩД)t+2ϕпр3], 0≤t≤Tс,
где  ;
;
К2 - коэффициент передачи перемножителя (в качестве удвоителя 41 фазы используется перемножитель, на два входа которого подается одно и то же напряжение uпр3(t)),
в котором фазовая манипуляция уже отсутствует, так как 2ϕk(t)={0, 2π}.
Ширина спектра сложного ФМн-сигнала определяется длительностью τэ его элементарных посылок (Δfс=1/τэ). Тогда как ширина спектра его второй гармоники определяется длительностью сигнала Тс (Δf2=1/Тc). Следовательно, при умножении фазы на два широкополосного ФМн-сигнала его спектра сворачивается в N раз (Δfc/Δf2=N).
Гармоническое напряжение u3(t) выделяется узкополосным фильтром 42 и поступает на вход делителя 43 фазы на два, на выходе которого образуется гармоническое напряжение (фиг.6 ж)
u4(t)=U4cos[ωпр3± ΩД)t+ϕпр3], 0≤t≤T.
Это напряжение выделяется узкополосным фильтром 44 и поступает на второй вход четвертого смесителя 46 и на второй (опорный) вход фазового детектора 45. На выходе последнего образуется низкочастотное напряжение (фиг.6, з)
uн1(t)=Uн1cosϕk(t), 0≤t≤Tc,
где  ;
;
К3 - коэффициент передачи фазового детектора, пропорциональное модулирующему коду M(t) (фиг.6, в). Это напряжение поступает на первый вход вычислительного блока 49.
На первый вход смесителя 46 подается высокочастотное колебание uc(t) с второго выхода генератора 21. На выходе смесителя 46 образуется низкочастотное напряжение
uн2(t)=Uн2cos ΩД, 0≤t≤Tc,
где  ;
;
которое пропорционально доплеровскому смещению частоты, выделяется узкополосным фильтром 47 и подается на вход измерителя 48 частоты Доплера. Измеряемое значение частоты Доплера поступает на второй вход вычислительного блока 49.
В вычислительном блоке 49 по координатам двух подспутниковых точек и двух измеренных углов α1 и α3 однозначно определяется местоположение аварийного объекта.
В вычислительном блоке 49 рассчитываются также элементы орбиты КА.
Доплеровская частота определяется на основании соотношения
где λс - рабочая длина волны;
r - текущее расстояние между КА и наземным пунктом управления.
Если вести отсчет времени от момента прохода КА точки траверза, то текущее расстояние равно (фиг.5)

где ro - кратчайшее расстояние между КА и наземным пунктом управления;
V - скорость движения КА по орбите.
Подстановка (2) в (1) дает

Зависимость доплеровской частоты от времени, рассчитанная по формуле (3) при условии, что V=7,9 км/с, rо=500 км и λс=3 м, приведена на фиг.5, б.
Как видно, эта зависимость представляет собой монотонно убывающую функцию времени, причем при неограниченном возрастании абсолютного значения t обе ветви этой кривой стремятся к одинаковому, но разному по знаку пределу
На линейном участке вблизи точки перегиба  и тогда (фиг.5)
и тогда (фиг.5)

Дифференцируя (4) по времени, можно найти выражение для производной от доплеровской частоты
Из последнего выражения следует, что зная скорость V и длину волны λс, а также измерив производную F'д, можно найти кратчайшее расстояние

Указанные вычисления осуществляются в вычислительном блоке 49.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает управление сбросом информации с космического аппарата на наземный пункт управления и уточнение элементов орбиты космического аппарата. При этом используется запросный метод измерения радиальной скорости КА, особенностью которого является необходимость развязки запросного и ответного сигналов, которая достигается разносом их по частоте.
Поскольку при запросном методе измерения радиальной скорости опорные колебания смесителей приемника и сигнал передатчика формируются общим генератором 21 высокой частоты, то на точности измерения существенно сказывается лишь уход частоты этого генератора за время распространения сигнала до КА и обратно. Высокая кратковременная стабильность частоты генератора 21 обеспечивается проще, чем высокая долговременная стабильность эталонных генераторов в беззапросных системах. Поэтому в запросных системах такая же точность измерения, как и в беззапросных, может быть получена при использовании более простых (кварцевых) генераторов. Тем самым функциональные возможности способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАКЕТНО-КОСМИЧЕСКИМ КОМПЛЕКСОМ НА СТАРТОВОЙ ПОЗИЦИИ | 2010 |
|
RU2427508C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
Изобретение относится к способам определения местоположений объектов радионавигационными средствами наземного и космического базирования и может быть использовано на космических аппаратах (КА), стабилизируемых вращением. Предлагаемый способ заключается в измерении частоты Доплера беззапросным методом при появлении сигнала передатчика аварийного объекта в поле зрения приемной антенны КА. При этом находят пространственное положение КА в моменты, когда частота Доплера принимаемого сигнала равна нулю. Дважды измеряют в эти моменты угол между осью антенны и осью датчика горизонта с привязкой измерения к бортовому времени КА и вычисляют координаты подспутниковых точек. По координатам данных точек и значениям указанного угла определяют местоположение аварийного объекта на поверхности Земли. Дополнительно, при появлении КА в зоне приема на наземном пункте управления формируют высокочастотное колебание на исходной частоте, которое преобразуют с помощью первого гетеродина в сигнал (напряжение) на первой промежуточной частоте. Этот сигнал усиливают, излучают в эфир и улавливают на КА, где его преобразуют с помощью второго гетеродина в сигнал на второй промежуточной частоте. Данный сигнал манипулируют по фазе модулирующим кодом с информацией о местоположении аварийного объекта, излучают в эфир и улавливают на наземном пункте управления. Там его преобразуют с помощью третьего гетеродина в напряжение с третьей промежуточной частотой, из которого после фазовых преобразований выделяют гармоническое колебание на исходной частоте. Последнее используют в качестве опорного напряжения для синхронного детектирования указанного сигнала на третьей промежуточной частоте. При этом выделяют низкочастотное напряжение, пропорциональное модулирующему коду, сравнивают гармонические колебания на исходной частоте, измеряют частоту Доплера запросным методом и определяют элементы орбиты КА. Для реализации описанного способа представлена соответствующая аппаратура, размещенная на КА и на наземном пункте управления. Техническим результатом изобретения является расширение функциональных возможностей предлагаемого способа путем управления сбросом информации с КА на наземный пункт и уточнения элементов орбиты КА. 6 ил.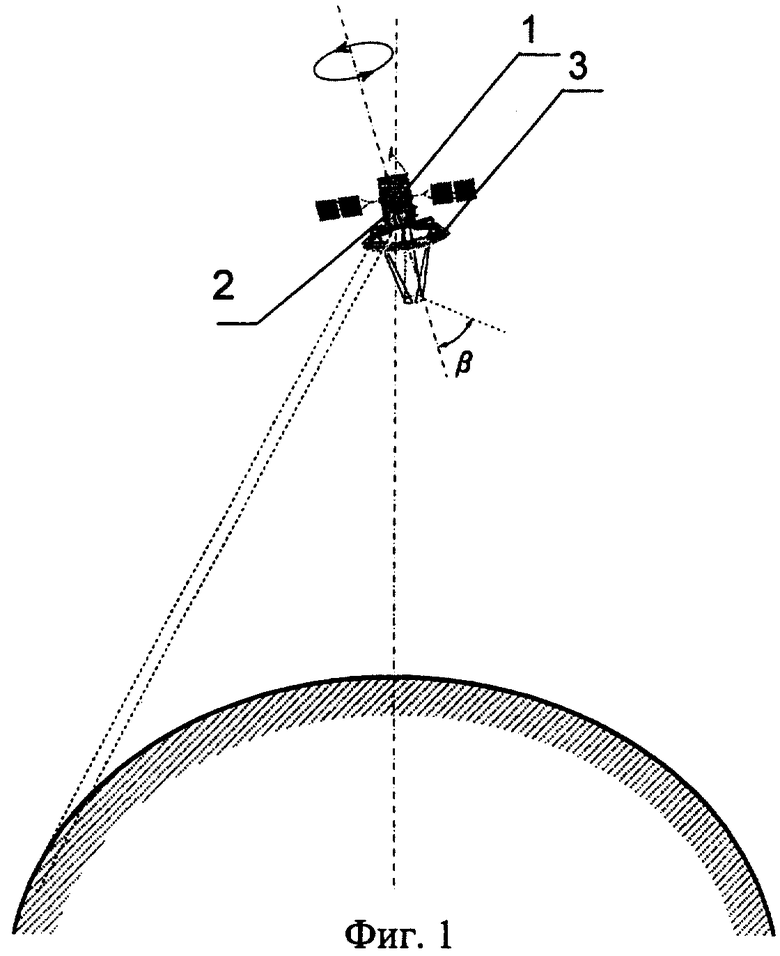
Угломестно-временной доплеровский способ определения координат аварийного объекта, находящегося на поверхности Земли, с помощью космического аппарата, стабилизируемого вращением вдоль вертикальной оси, заключающийся в том, что при появлении сигнала передатчика аварийного объекта на просматриваемой с космического аппарата полосе на поверхности Земли измеряют частоту Доплера беззапросным методом, находят пространственное положение космического аппарата в момент, когда частота Доплера принимаемого сигнала равна нулю, измеряют в этот момент времени угол между механической осью приемной антенны космического аппарата и осью датчика горизонта с привязкой измерения к бортовому времени, вычисляют координаты подспутниковой точки в момент указанного измерения, при этом измерения проводят два раза и по координатам двух подспутниковых точек и двум измерениям угла между механической осью приемной антенны космического аппарата и осью датчика горизонта определяют местоположение аварийного объекта на поверхности Земли, отличающийся тем, что при появлении космического аппарата в зоне приема на наземном пункте управления формируют высокочастотное колебание на частоте ωс, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωс+ωг1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, улавливают на космическом аппарате, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωг2, манипулируют его по фазе модулирующим кодом, содержащим информацию о местоположении аварийного объекта, формируя тем самым сложный сигнал с фазовой манипуляцией, излучают его в эфир на частоте ω2=ωпр2, улавливают на наземном пункте управления, преобразуют по частоте с использованием частоты ωг3 третьего гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3=ωг3-ωпp2=ωc, умножают его фазу на два, выделяют гармоническое колебание на частоте 2ωпр3, делят его фазу на два, выделяют гармоническое колебание на частоте ωпр3=ωс, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на третьей промежуточной частоте ωпр3, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, сравнивают гармонические колебания на частоте ωс, измеряют частоту Доплера запросным методом и определяют элементы орбиты космического аппарата.
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| RU 94039162 А1, 10.09.1996 | |||
| US 4161730 А, 17.07.1979 | |||
| US 6917328 А, 12.07.2005 | |||
| DE 4311473 А1, 13.10.1994. | |||

