Настоящее изобретение относится к области геофизических исследований, а более конкретно к способу вычисления и введения временной поправки для коррекции влияния переменной скорости волны при прохождении ее через водный слой.
В нефтегазодобывающей промышленности методики геофизических исследований обычно используют для ускорения поиска и оценки подземных углеводородных месторождений. Обычно источник сейсмической энергии используют для излучения сейсмического сигнала, который распространяется в грунт и по меньшей мере частично отражается подземными сейсмическими отражающими горизонтами (то есть границами раздела между подземными пластами с различным акустическим импедансом). Отраженные волны регистрируют с помощью сейсмических датчиков, расположенных на или вблизи поверхности земли, в водном пространстве или на известных глубинах в стволах скважин, а полученные сейсмические данные могут быть обработаны с целью получения информации относительно местоположения подземных отражающих горизонтов и физических свойств подземных пластов.
Одна из проблем, возникающих при сборе и обработке трехмерных сейсмических данных в некоторых морских районах, заключается в том, что переменная скорость волны в воде сопровождается не соответствующими временами прохождения между источниками и приемниками. В результате взаимодействия между теплыми и холодными течениями скорость волны в воде может меняться относительно быстро как во времени, так и по пространству. В таких районах эти изменения скорости могут быть достаточно большими и оказывают пагубное влияние на последующую обработку данных.
Скорость волны в воде может быть связана с температурой воды, соленостью и глубиной. Скорость продольных волн в воде моделируется уравнением [Sheriff, Encyclopedic dictionary of exploration geophysics, 3rd Ed., 1991]:
V=1449,2+4,6Т-0,055Т2+0,0003T3+(1,34-0,010T)(S-35)+0,0162Z,
где V - скорость волны в метрах в секунду;
Т - температура в градусах по шкале Цельсия;
S - соленость в частях на тысячу; и
Z - глубина ниже поверхности воды в метрах.
Водные массы, имеющие различные температуры, при встрече могут перемешиваться в разной степени, и местоположение «фронта» между водными массами может существенно изменяться в течение короткого периода времени. Это означает, что структура водного столба и, следовательно, профиль скорости волны в воде может существенно изменяться в пределах относительно небольших расстояний и отрезков времени.
Эти изменения скорости волны в воде имеют значение при обработке сейсмических данных. В случае типичного способа сбора трехмерных данных скорость волны в воде будет изменяться по длине линии хода. В некоторых ситуациях можно идентифицировать и прослеживать отражения от границ раздела между теплыми и холодными слоями воды по длине линии хода. Скорость волны в воде изменяется на интервалах, меньших длины сейсморазведочного кабеля для сбора данных, что может влиять на сбор данных. Однако основной эффект обычно наблюдается между соседними линиями хода. В зависимости от расписания сбора данных соседние или совпадающие линии хода могут быть разделены, несколькими часами, днями или даже неделями, так что, хотя две линии могут быть физически близки друг к другу, они могут быть сильно разнесены во времени, вследствие чего полученные наборы данных будут со значительно различающимися скоростями волны в воде. Различия в скоростях волны в воде приведут к появлению динамических различий между данными в объединенных наборах данных, и эти изменения могут влиять на обработку данных, в частности на такие процессы обработки, как подавление кратных волн, коррекция за наклон отражающей границы (DMO), суммирование и трехмерная миграция.
В способах из предшествующего уровня техники скорость волны в воде обычно оценивали на основании самих сейсмических данных без проведения независимого измерения. Непосредственные вступления волн бесполезны, поскольку они приходят только через мелкую воду и часто не содержат достаточной информации для определения отношения действительной глубины к скоростному разрезу. Скорость волны в воде обычно возрастает с глубиной. По мере увеличения глубины влияние водных течений становится сильнее. При отсутствии непосредственного измерения глубины воды время пробега до нижней границы воды не может быть использовано для вычисления скорости волны в воде. Если в пределах длины базы сбора данных нет значительных изменений скорости волны, то эффективная скорость или среднеквадратическая скорость может быть оценена по зарегистрированным волнам от источника сейсмических волн или по сейсмограммам общей средней точки. Кроме того, томографическое или волновое уравнение, основанное на методиках обращения, может быть использовано для обращения функции скорости, изменяющейся с глубиной (и, возможно, по пространству).
В одном способе из предшествующего уровня техники для определения скорости волны в воде получают оценку на основании эффективной скорости. В этом способе предполагается, что скорость волны в воде является постоянной или изменяется только с глубиной, что приводит к примерно гиперболическому приращению времени, и при этом поперечные изменения скорости могут быть проигнорированы. Этот расчет ограничен небольшими удалениями, в результате чего не учитывается воздействие эффектов преломления. Таким путем может быть оценена локальная средняя скорость волны в воде.
Изменения скорости волны в воде, приводящие к динамическим различиям в объединенных сейсмических данных, часто будут достаточно большими и будут оказывать влияние на обработку данных и последующее построение изображения. В случае двумерной обработки или в пределах каждой линии хода это влияние может не быть особенно сильным, поскольку изменения скорости могут быть относительно плавными и непрерывными вдоль базы сбора данных. Однако в случае трехмерной обработки, когда объединяют различные во времени, но совпадающие по пространству или соседние данные, скорость волны в воде может изменяться скачками. В данных могут появляться разрывы или «разломы», например, в направлении, поперечном по отношению к соседним линиям хода.
Пагубное влияние на последующую обработку вследствие явных статических проблем будет иметь место, если эти проблемы не устранить. Например, трехмерная процедура коррекции на наклон отражающей границы (DMO) не будет осуществляться адекватно, а артефакты изображения, связанные с размытием, станут проблемой. При трехмерной миграции артефакты будут возникать на всех азимутах от края каждого разлома. Многие трехмерные процессы обработки данных до суммирования могут быть скомпрометированы.
Изменения скорости волны в воде на записях сейсмических данных являются динамическими, и введение соответствующей поправки, например, с помощью процедуры пересчета волнового уравнения может потребовать большой мощности вычислительных средств. В одном способе из предшествующего уровня техники вводится статическая поправка. В случае плоской нижней границы воды и независимой от глубины скорости волны в воде изменение времени вступления волны от нижней границы воды Δtw, обусловленное изменением скорости волны в воде ΔVw, непосредственно вычисляется из
Δtw=tw(ΔVw/Vw)
Этот расчет может быть использован для вычисления статической поправки, чтобы компенсировать изменение скорости волны в воде путем вычисления статической поправки для случая нулевого отклонения и введения ее после введения в данные поправки за нормальное приращение времени. Поскольку поправка является точной только для случая нулевого удаления, наклонные траектории луча не будут учитываться точно.
Скорость волны в воде и время пробега до нижней границы воды при нулевом удалении могут быть вычислены вдоль длины каждой линии хода и затем использованы для генерирования статической поправки, описанной выше, позволяющей скорректировать данные е предположении отклонения скорости волны в воде от эталонной скорости. Эти поправки непрерывно изменяются вдоль каждой линии хода, но имеют скачки на границах линий хода или между совпадающими по пространству наборами данных, собранных раздельно во времени. Далее статические поправки могут быть введены в данные после введения поправки за нормальное приращение времени (NMO).
Океанографические условия могут оказывать влияние на скорость волны в воде на протяжении относительно коротких промежутков времени и/или на протяжении небольших пространственных отрезков. Поскольку близкие или совпадающие по пространству данные могут быть собраны на различных интервалах времени, чем предоставляется время для изменения скорости волны в воде, то могут иметь место нарушения непрерывности, которые могут серьезно повлиять на последующую обработку. В способах из предшествующего уровня техники только частично компенсируется изменение скоростей во времени, которое влияет на сбор данных. Выгодно иметь эффективную поправку за влияние динамически изменяющейся скорости волны в воде при сборе данных в морских условиях, в которой учитываются наклонные траектории лучей.
Изобретением является способ получения поправки на скорость для обработки сейсмических данных с целью коррекции влияния переменных скоростей волны в воде. Для сейсмических данных определяют статическую поправку при нулевом удалении, которая представляет собой разность между наблюдаемым временем пробега до нижней границы воды и идеальным временем пробега до нижней границы воды, определяемым при использовании выбранной постоянной скорости для идеального случая. Для сейсмических данных выбирают постоянную скорость волны в воде. Для сейсмических данных определяют время пробега до нижней границы воды при нулевом удалении. Для сейсмических данных определяют наблюдаемую скорость. Динамическую поправку за влияние скорости волны в воде вычисляют и вводят в сейсмические данные в случае изменяющихся удалений и траекторий лучей.
Настоящее изобретение и его преимущества станут более понятными при ознакомлении с нижеследующим подробным описанием и сопровождающими чертежами, на которых:
фиг.1 - модель земли для наблюдаемых значений, предназначенная для отображения на идеальный случай;
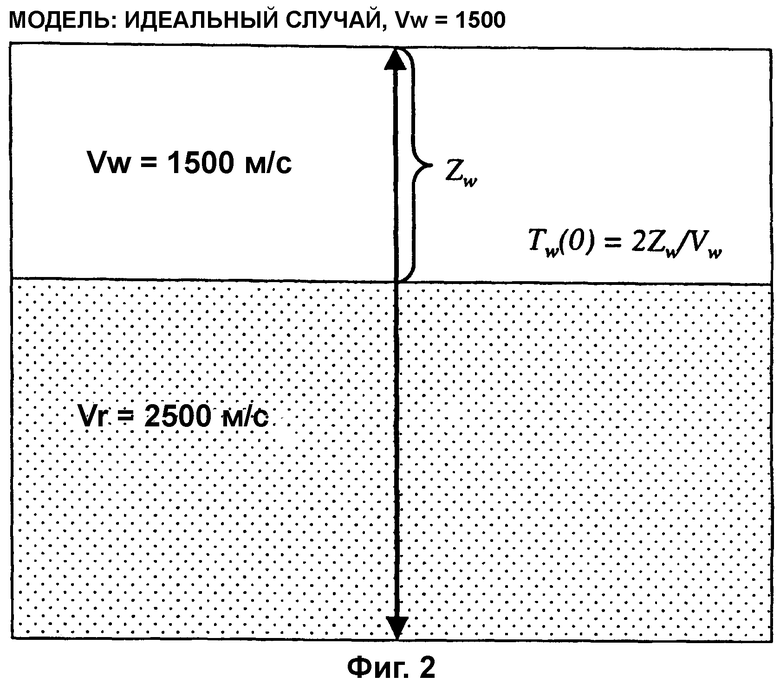
фиг.2 - модель земли для идеальных значений, отображенных из наблюдаемого случая;
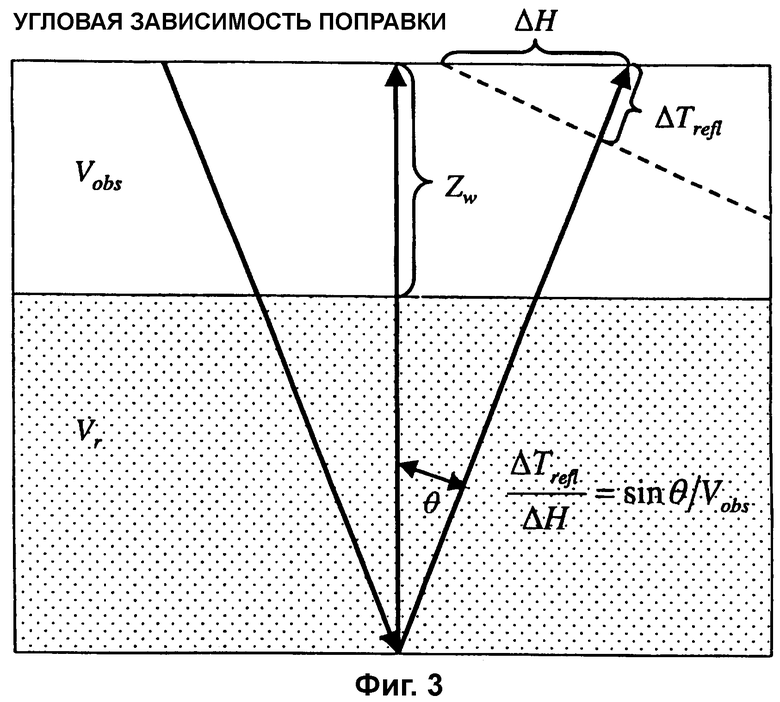
фиг.3 - иллюстрация угловой зависимости поправок; и
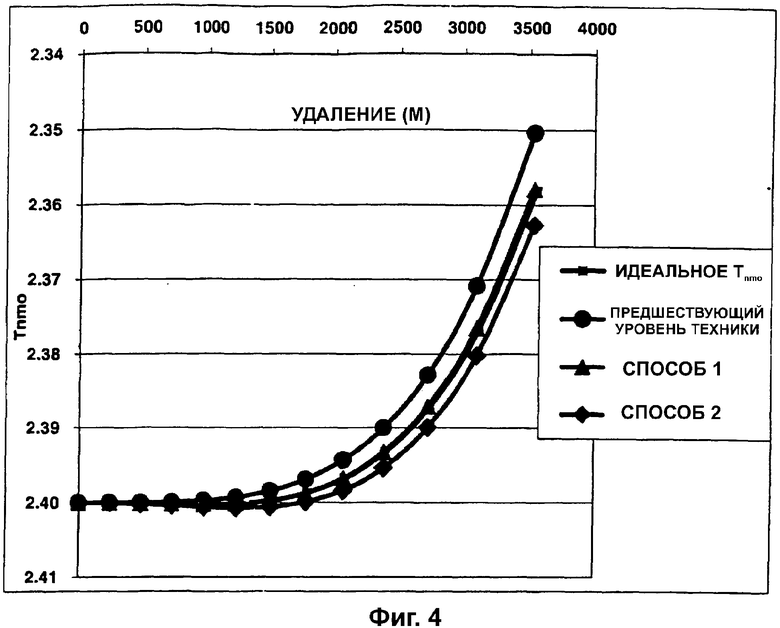
фиг.4 - иллюстрация сравнения идеального случая предшествующего уровня техники и предпочтительных вариантов осуществления настоящего изобретения.
Хотя изобретение будет описано применительно к предпочтительным вариантам осуществления, должно быть понятно, что изобретение не ограничено ими. Напротив, подразумевается, что оно охватывает все альтернативные варианты, модификации и эквиваленты, которые могут находиться в рамках сущности и объема изобретения, определенных приложенной формулой изобретения.
Настоящим изобретением является способ, предназначенный для решения проблем коррекции сейсмических данных, которые возникают при сборе данных в морских условиях вследствие переменных скоростей волны в воде. В некоторых вариантах осуществления поправки вычисляют и вводят так, что эти поправки отображают сейсмические данные на идеальный случай постоянной скорости волны в воде. Другие преимущества изобретения без труда станут очевидными для специалистов в области техники, к которой относится изобретение, из нижеследующего подробного описания. В той степени, в которой нижеследующее подробное описание является ограниченным конкретными вариантами осуществления или конкретным использованием изобретения, оно подразумевается иллюстративным и не должно интерпретироваться как ограничивающее объем изобретения.
Чтобы разрешить проблемы, встречающиеся во время сбора сейсмических данных в морских условиях, это изобретение может быть реализовано с помощью компьютерной программы, предназначенной для обработки сейсмических данных. Во время сбора сейсмических данных в морских условиях часто имеют место пробелы в покрытии района сейсмической съемкой. Эти пробелы исключают путем сбора пополняющих данных в более позднее время. Однако за время между сбором данных физические изменения в море, такие как температура или соленость, приводят к изменению скорости волны, что проявляется в динамических изменениях зарегистрированных времен пробега, в результате чего исключается возможность точного объединения и отображения данных.
Этим изобретением исключаются эффекты переменной скорости волны в воде путем вычисления и введения поправок, которые отображают сейсмические данные на идеальный случай постоянной скорости волны в воде. На основании отдельного этапа анализа для всех поправок предполагаются известными значения вертикальных временных погрешностей (при нулевом удалении), обусловленных изменениями скорости волны в воде, и времена пробега до нижней границы воды при нулевом удалении. Аналогичным образом предполагаются известными скорости волны в воде. Упомянутые временные погрешности и скорости волны в воде связаны уравнением (5), приведенным ниже. Также предполагают известными значения времен пробега до нижней границы воды при нулевом удалении. На основании этой информации и произвольно определенной постоянной скорости волны в воде для «идеального» случая можно вычислить наблюдаемую (действительную) скорость волны в воде относительно «идеального» случая. Необходимой дополнительной информацией является только угол траектории луча, проходящего через водный слой. Угол может быть вычислен непосредственно из скоростей, полученных на основе нормального приращения времени посредством обычного анализа сейсмических данных, и на основе указанной выше информации. Зависимая от времени и зависимая от удаления поправка может быть получена для каждой выборки сейсмических данных до коррекции за нормальное приращение времени.
Для исключения этих динамических разностей времен пробега, измерения скорости волны в воде можно объединить с измерениями эффективной скорости, чтобы вычислить и ввести динамическую временную поправку при прохождении волны через водный слой с переменной скоростью. В предпочтительных вариантах осуществления этого изобретения данные корректируют к постоянным скоростям волны в воде «идеального» случая, при которых учитываются как вертикальные, так и наклонные траектории лучей, проходящих через водный слой. Для обеспечения устойчивости и исключения требующих больших затрат вычислительной мощности решений, сопряженных с трассировкой лучей, угол прохождения волны через воду может быть определен непосредственно из данных нормального приращения времени, полученных на основе эффективных скоростей.
Способ начинается с вывода поправки, которая отображает наблюдаемый случай (фиг.1) относительно идеального случая (фиг.2).


Тw - время вертикального пробега до нижней границы воды и обратно, определяемое постоянной скоростью Vw волны в воде в идеальном случае и глубиной Zw воды. Tobs - наблюдаемое время вертикального пробега до нижней границы воды и обратно, определяемое наблюдаемой (действительной) скоростью Vobs волны в воде. Вертикальную статическую поправку Δt можно определить как разность между наблюдаемым временем пробега до нижней границы воды и идеальным временем пробега до нижней границы воды, определяемым при использовании выбранной постоянной скорости идеального случая. В работе Lynn, MacKay and Beasley, 1993, "Efficient migration through complex water-bottom topography", Geophysics, Soc. of Expl. Geophys., 58, 393-398, вертикальная (при нулевом удалении) временная поправка Δt определена как:


Значения Δt и Tobs предполагаются известными, a Vw является произвольной постоянной скоростью. Tobs - единственное значение для сбора данных любого типа, подлежащее коррекции. Кроме того, вертикальную поправку Δt можно уточнить путем количественной оценки статических сдвигов между линиями хода сейсморазведки при нулевом удалении. Вертикальную статическую поправку, определенную уравнением (4), также представил Wombell в работе "Water velocity variation in 3-D seismic processing", 66th Ann. Internat. Mtg: Soc. of Expl. Geophys., 1966, 1666-1669. Эту вертикальную статическую поправку можно вводить после введения поправки за нормальное приращение времени при использовании Vobs для водного слоя. Решение уравнения (4) относительно Vobs дает:

Это дает значение наблюдаемой скорости Vobs волны в воде. Независимо от того, определяется ли Vobs косвенными способами (например, по разности между вертикальными временными сдвигами) или непосредственными способами (например, путем анализа кинематических поправок), значение Vobs пригодно для решения задачи точной (динамической) коррекции влияния скорости волны в воде в дополнение к вертикальным поправкам за влияние скорости волны в воде.
Целевое время пробега до нижней границы воды и временные сдвиги для трасс могут быть определены раздельно. Целевое время пробега до нижней границы воды (например, модельное значение Тw) и временной сдвиг Δt можно получить для каждой линии хода. Временной сдвиг Δt и целевое время Тw пробега до нижней границы воды объединяют для получения Vobs по отношению к постоянной скорости Vw. В этом случае Vobs будет связана с постоянной скоростью с расхождением в несколько процентов. Затем Vobs может быть сглажена и интерполирована. В качестве альтернативы, если измерения Δt не используются, эквивалентная Vobs может быть получена из вариантов анализа другого вида.
Проблема, связанная с введением только вертикальных поправок (аналогично Δt из уравнения 4), заключается в том, что для лучей, падающих на поверхность наклонно, нужна большая временная поправка, вследствие более протяженной трассы луча (см. геометрию на фиг.3):

где Δt(θ=0) - вертикальная поправка.
Для вывода выражения для угла θ луча вспомним, что наблюдаемое нормальное приращение времени на поверхности составляет (фиг.3):

где Н - полное удаление.
Значение Vobs можно определить из приведенного выше уравнения (5) или получить непосредственно из анализа скоростей. Объединяя с уравнением нормального приращения времени, получаем:

где Trefl(H=0) - время вертикального пробега до отражающей границы и обратно;
Vrms - эффективная скорость, найденная из анализа кинематических поправок для сейсмических волн и имеющая отношение не только к отражающей поверхности на нижней границе воды. Оценка выведенного уравнения (7) при использовании уравнения (8) дает

или

Существенно, что ΔTrefl(H) выражает наблюдаемые времена пробега всех волн в зависимости от полного удаления H. Таким путем угол прихода для каждой волны определяют устойчивым образом без необходимости трассировки лучей с помощью модели интервальной скорости, обычно ресурсоемкого и потенциально неустойчивого процесса.
Наконец, в предположении плоской отражающей поверхности и прямолинейных лучей мы можем определить динамическую поправку, используя наблюдаемое время пробега до нижней границы воды, и временную поправку при нулевом удалении в виде Vobs:
или в членах поправки при нулевом удалении:

С помощью этой динамической поправки обеспечивается возможность зависимой от удаления коррекции для всех удалений источника от приемника.
На фиг.4 показан результат применения изобретения к искусственным данным. Данные в виде сейсмограммы общей средней точки получали, используя точное решение с трассировкой лучей в рамках двухслойной модели. В этой модели глубина воды составляла 1000 м, а вторая горизонтальная отражающая поверхность находилась на глубине 2000 м, при этом интервальная скорость была 2500 м/с вплоть до нижней границы воды. Решения с трассировкой лучей для отражений от более глубоких отражающих поверхностей показаны для двух случаев, для идеального случая (скорость волны в воде задана равной 1500 м/с) и для наблюдаемого случая (скорость волны в воде 1470 м/с). Времена пробега показаны соответствующими отражающей поверхности на глубине 2000 м. Идеальный случай использовали в качестве эталонного, а поправки применяли для наблюдаемого случая.
Данные для случая постоянной скорости волны в воде (1500 м/с) показаны на фиг.4 после коррекции за нормальное приращение времени при теоретической среднеквадратической по двум слоям скорости (1944,6 м/с) вплоть до отражающей поверхности на глубине 2000 м, как помеченные квадратами (снабженные примечанием: идеальное Tnmo). Отметим, что линия данных перестает быть горизонтальной, когда удаление приблизительно равно глубине, с которой приходит волна (2000 м). Здесь представлен оптимальный результат; загиб кверху при больших удалениях является ожидаемым вследствие влияния преломления луча, которое не корректируется обычной гиперболической поправкой за нормальное приращение времени. Согласно способу (Wombell) из предшествующего уровня техники вертикальную поправку при нулевом удалении использовали после коррекции за нормальное приращение времени при среднеквадратической по двум слоям скорости Vobs (1917 м/с). Результаты показаны на фиг.4 как помеченные кружками (снабженные примечанием: предшествующий уровень техники).
В одном предпочтительном варианте осуществления настоящего изобретения вертикальную поправку Δt(θ=0) вводили до коррекции за нормальное приращение времени. Эти результаты после осуществления коррекции за нормальное приращение времени при использовании среднеквадратической по двум слоям скорости, содержащей Vw в водном слое (1944,6 м/с), показаны как помеченные ромбиками (снабженные примечанием: способ 2).
В другом предпочтительном варианте осуществления динамическую поправку вводили до коррекции за нормальное приращение времени, и результаты показаны на фиг.4 после коррекции за нормальное приращение времени при среднеквадратической по двум слоям скорости (1944,6 м/с) как помеченные треугольниками (снабженные примечанием: способ 1). Отметим, что динамическая поправка, определяемая уравнением (12) (треугольники), дает результат, очень близкий к идеальному случаю (идеальное Tnmo в виде квадратов).
В случае получения любой конкретной сейсмограммы, например сейсмограммы источника сейсмических волн пункта приема или общей средней точки, информация поступает из конкретного источника сейсмических волн и регистрируется с помощью конкретного приемника. Скорость (среднеквадратическую), полученную на основе приращения времени, используют, чтобы получить из сейсмограммы угол прихода на водной поверхности. Угол прихода на (или из) месте расположения источника или месте расположения приемника может быть использован при вычислении Tobs путем проецирования обоих плечей траектории луча на нижнюю границу воды (или на нижнюю границу воды в модели, например Тw).
Для каждой общей средней точки эффективная скорость может быть заменена сглаженным и интерполированным значением Vobs до нижней границы воды (Tobs) - Затем может быть вычислена динамическая поправка и введена до коррекции за нормальное приращение времени (NMO). После этого при использовании значений Тw и Vw могут быть определены скорректированные функции скорости.
Специалистам в области техники, к которой относится изобретение, должно быть понятно, что описанный в настоящей заявке способ может быть осуществлен на практике в соответствии с раскрытием, включая использование, не в ограничительном смысле, описанные варианты осуществления. Кроме того, должно быть понятно, что изобретение не должно быть необоснованно ограничено предшествующим описанием, которое изложено только с иллюстративными целями. Для специалистов в области техники, к которой относится изобретение, должны быть очевидными различные модификации и альтернативные варианты, выполненные без отступления от истинного объема изобретения, определенного в нижеследующей формуле изобретения.
Настоящее изобретение относится к области геофизических исследований. Сущность изобретения состоит в том, что исключаются эффекты переменной скорости волны в воде. На основании отдельного этапа анализа для всех поправок предполагаются известными значения вертикальных временных погрешностей, обусловленных изменениями скорости волны в воде, и времена пробега до нижней границы воды при нулевом удалении. Аналогичным образом предполагаются известными скорости волны в воде. Упомянутые временные погрешности и скорости волны в воде взаимосвязаны. Также предполагаются известными времена пробега до нижней границы воды при нулевом удалении. На основании этой информации и произвольно определенной «идеальной» скорости волны в воде можно вычислить наблюдаемую скорость волны в воде относительно «идеального» случая. Необходимой дополнительной информацией является только угол траектории луча, проходящего через водный слой. Зависимая от времени и зависимая от удаления поправка может быть получена для каждой выборки сейсмических данных до коррекции за нормальное приращение времени. Технический результат данного изобретения предназначен для решения проблем коррекции сейсмических данных, которые возникают при сборе данных в морских условиях вследствие переменных скоростей волны в воде. 4 н. и 23 з.п. ф-лы, 4 ил.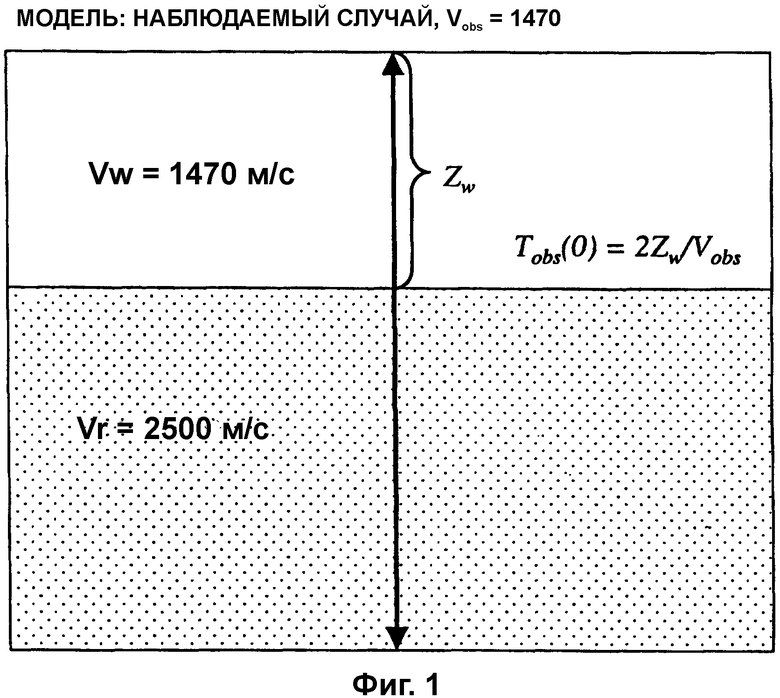
(a) определяют наблюдаемую скорость на основании анализа скоростей в отношении собранных сейсмических данных и выбирают постоянную скорость волны в воде;
(b) определяют динамическую вертикальную временную поправку при использовании указанной наблюдаемой скорости и постоянной скорости волны в воде и
(c) вводят указанную динамическую вертикальную временную поправку в сейсмические данные до коррекции за нормальное приращение времени.
Δt(θ)=Tobs(Vobs/Vw-1)/{1-[HVobs/(Trefl(H)·V2 rms)]2}1/2,
где Vw - указанная выбираемая постоянная скорость.
(a) определяют для сейсмических данных статическую поправку при нулевом удалении, Δt, которая представляет собой разность между наблюдаемым временем пробега до нижней границы воды и постоянным временем пробега до нижней границы воды, определяемым при использовании выбранной постоянной скорости;
(b) выбирают для сейсмических данных постоянную скорость волны в воде, Vw;
(c) определяют для сейсмических данных время пробега до нижней границы воды при нулевом удалении;
(d) определяют для сейсмических данных наблюдаемую скорость Vobs и
(e) определяют динамическую поправку за влияние скорости волны в воде.
Δt(θ)=Tobs(Vobs/Vw-1)/{1-[HVobs/(Trefl(H)·V2 rms)]2}1/2.
(а) определяют для сейсмических данных статическую поправку при нулевом удалении, Δt, которая представляет собой разность между наблюдаемым временем пробега до нижней границы воды и постоянным временем пробега до нижней границы воды, определяемым при использовании выбранной постоянной скорости;
(b) выбирают для сейсмических данных постоянную скорость волны в воде, Vw;
(c) определяют для сейсмических данных время пробега до нижней границы воды при нулевом удалении;
(d) определяют для сейсмических данных наблюдаемую скорость Vobs;
(e) определяют динамическую поправку за влияние скорости волны в воде и
(f) вводят указанную динамическую поправку за влияние скорости в воде в сейсмические данные.
Δt(θ)=Tobs(Vobs/Vw-1)/{1-[HVobs/(Trefl(H)·V2 rms)]2}1/2.
(a) определяют наблюдаемую скорость;
(b) определяют зависимую от угла временную поправку при использовании указанной наблюдаемой скорости и
(c) вводят указанную зависимую от угла поправку в сейсмические данные до коррекции за нормальное приращение времени.
Δt(θ)=Tobs(Vobs/Vw-1)/{1-[HVobs/(Trefl(H)·V2 rms)]2}1/2,
где Vw - выбираемая постоянная скорость.
| Способ сейсморазведки на акваториях | 1989 |
|
SU1697028A1 |
| Устройство для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов | 1976 |
|
SU614405A1 |
| СПОСОБ ОБРАБОТКИ СТОКОВ ОТ ГИДРОКАВИТАЦИОННОГО ВЫМЫВАНИЯ РАКЕТНОГО ДВИГАТЕЛЯ ТВЕРДОГО ТОПЛИВА | 2007 |
|
RU2339906C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| US 4992993, 12.12.1991. | |||

