Изобретение относится к способам сейсмических исследований районов, покрытых водой, преимущественно методом непрерывного сейсмического профилирования.
Известен способ сейсморазведки на акваториях, заключающийся в одновременной буксировке судном-носителем источника и приемника сейсмических сигналов при циклическом излучении зондирующего сигнала посредством источника, приеме эхо-сигналов посредством приемника и регистрации принимаемых эхо-сигналов на носителе информации путем их развертки с постоянной скоростью. По этому способу развертку производят автономно, и моменты каждого излучения совмещают с моментами начала развертки.
Недостатком данного способа является малая рачрешающая способность Этот недостаток обусловлен, во-первых, том, что в данном способе не учитываются изменения положения источ ика г прием-.гка по вер- тикали при их букскх ке ьизианные, например, качкой с/цна. Этн изменения вызь.ЕЭ1ЭТ неконтро; rpyeMoie искахения моментов приема эхо-сигралоь, что приводит к потере коррг/.яцич заре ис П повэн- ных а разных циклах зондирования отражений от одной и той же границы. В результате разрешение т зкорасположен- ных границ ух,,шае с ч, либо r-зновчтоя невозможным. Во-вторых, синхронизация момеьтоз излуиен f an геномной разверткой дегазт невозможной их привязку к точней временной шкало i с1- ixsei точность
а
ю
определения координат элементов сейсмического профиля.
Известен также способ сейсморазведки на акваториях, заключающийся в одновременной буксировке судном-носителем источника и приемника сейсмических сигналов, циклическом излучении зондирующего сигнала посредством источника, приеме эхо-сигнала E(t) посредством приемника с преобразованием его в электрический сигнал U(t) м циклической регистрации сигнала U(t) с задержкой г относительно момента излучения.
Недостаток известного способа заключается в малой разрешающей способности сейсморазведки вследствие временных искажений, вызванных изменением положения источника и приемника по вертикали. Указанные искажения проявляются, в частности, в том, что в соседних циклах зондирования моменты приема отражений от одних и тех же границ раздела в осадочной толще оказываются сдвинутыми друг относительно друга, причем неодинаково для разных циклов зондирования м разных границ. При этом, если величина сдвига соизмерима с временной разрешающей способностью зондирующего сигнала, зарегистрированные сигналы обладают значительно меньшей коррелируемостыо, чем полученные при приеме и регистрации тех же эхо-сигналов, но при неизменном положении источника и приемника. Это обстоя- тельство приводит к невозможности однозначного прослеживания близкорасположенных отражающих границ, т.е. уменьшает разрешающую способность сейсморазведки.
Целью изобретения является повышение разрешающей способности сейсморазведки.
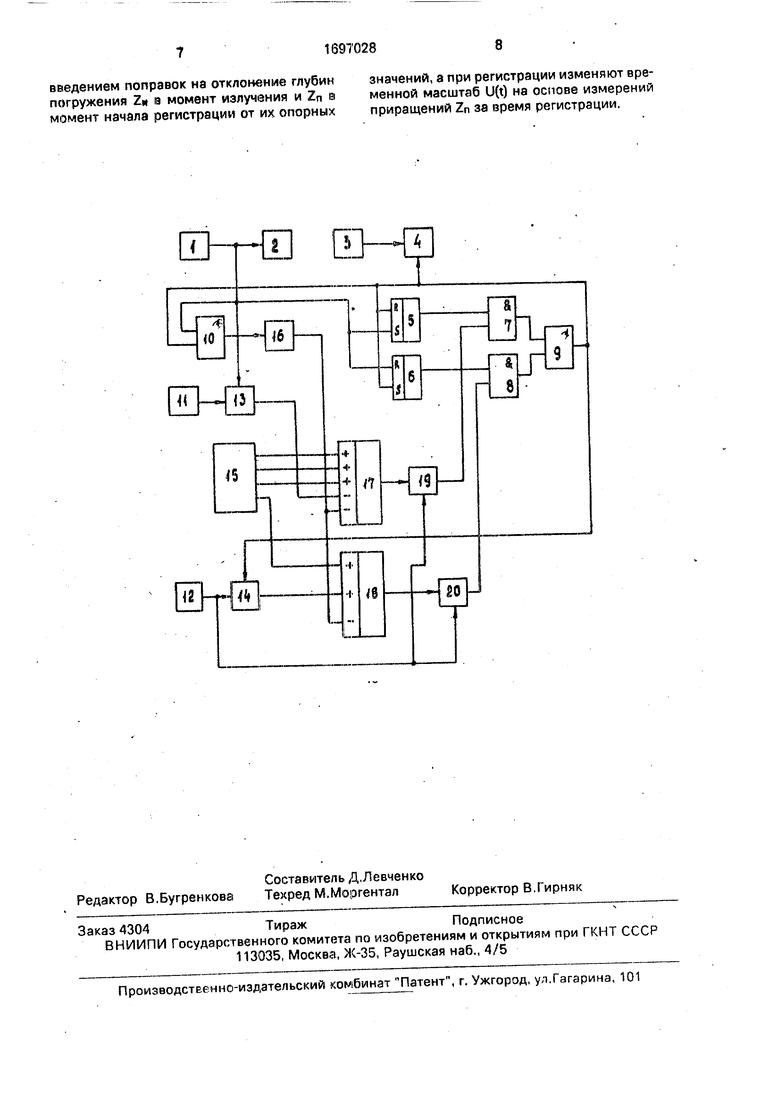
На чертеже представлена структурная схема одной из возможных реализаций устройства для осуществления предложенного способа сейсморазведки на акваториях.
Устройство содержит блок 1 управления (БУ), источник 2 акустических сигналов, приемник 3 сейсмических сигналов, графический регистратор 4 дискретного действия (РДД), RS-триггеры 5 и 6, логические схемы И 7 и 8 и схемы ИЛИ 9 и 10, датчики 11 глубины источника сигнала (ДП/1) и приемник 12 (ДГП), устройства 13 и 14 выборки- хранения (УВХ), блок 15 опорных напряжений (БОН), генератор 16 линейно нарастающего напряжения (ГЛИН), алгебраический сумматор 17 на пять входов (три входа плюс, два входе минус), алгебраический сумматор 18 из три входа (два входа плюс, один вход минус), нуль-органы 19
и 20. При этом выход БУ 1 соединен с источником 2 и совмещенными первым входом схемы ИЛИ 10, входом 8-триггера5, входом R-триггера 6 и входом управления УВХ 13.
Выход приемника 3 подключен к информационному входу РДД 4, вход управления которого соединен с совмещенными выходом схемы ИЛИ 9, входом R-триггера 5, входом S-триггера 6, вторым входом схемы
0 ИЛИ 10 и входом управления УВХ 14. Выход схемы ИЛИ 10 подключен к входу запуска ГЛИН 16, выход которого подключен к со- вмещзнным входу минус сумматора 18 и второму входу минус сумматора 17. Пер5 вый вход минус сумматора 17 соединен с
- выходом УВХ 13, вход которого совмещен с
выходом ДГИ 11, а входы плюс указанного
сумматора с первого по третий совмещены
с выходами БОН 15 с первого по третий.
0 Четвертый выход БОН 15 совмещен с первым входом плюс сумматора 18, второй вход плюс этого сумматора совмещен с выходом УВХ 14. Выходы сумматоров 17 и 18 соединены соответственно с первыми
5 входами нуль-органов 19 и 20, вторые входы которых совмещены и подключены к совмещенным выходу ДГП 12 и входу УВХ 14. Выходы нуль-органов 19 и 20 соединены соответственно с первыми входами схем И
0 7 и 8, вторые входы указанных схем соединены с прямыми выходами триггеров 5 и 6 соответственно, а выходы этих схем соединены соответственно с первым и вторым
5 входами схемы ИЛИ 9.
В качестве блока 1 управления может быть использован хронометр, выполненный, например, в виде таймера с внутренним запуском.
0 Источник 2 акустических сигналов может представлять собой пневматическую пушку. Приемник 3 сейсмических сигналов может быть выполнен в виде одиночного гидрофона или линейной антенны гидрофо5 нов. Графический регистратор дискретного действия представляет собой магнитофон или твердотельное запоминающее устройство.
Датчики глубины приемника и источни0 ка могут быть выполнены идентичными на основе серийного датчика давления ДД 2 и 5. Устройство выборки-хранения и алгебраические сумматоры на произвольное число входов описаны в справочной литературе. В
5 качестве нуль-органов могут быть использованы компараторы напряжения. Блок опорных напряжений может быть выполнен из четырех независимых источников опорного напряжения с регулируемым выходом.
Генератор линейно нарастающего напряжения может быть выполнен в виде кондонсатора, заряжаемого постоянным током, параллельно которому включен ключ.
Сущность изобретения заключается в компенсации влияния на коррелируемость зарегистрированных сигналов временных искажений принятых сигналов, вызванных изменением положения источника и приемника сейсмических сигналов по вертикали путем изменения временной задержки т регистрации сейсмического сигнала отно- сительно момента излучения зондирующего импульсе и соответствующего изменения временного масштаба регистрируемых сейсмических сигналов.
При этом определение глубины букси- ровки источника ZH и приемника Zn необходимо для получения непрерывной оценки их положения по вертикали, используемой при указанной компенсации. Задание опорных значений 2Ио, Zno глубины источника и при- емника необходимо для того, чтобы рассматривать временные искажения как паразитный временной сдвиг моментов приема каждого из значений эхо-сигнала относительно тех моментов, в которые эти значения были бы приняты при неизменной глубине ZK ZHO, Zn Zno. 8 частности, при 2 2w, Zn Zno в каждом i-м цикле зондирования интервал времени Atmi между моментом tj {излучения и моментом приема отражения от произвольной m-й границы раздела в осадочной толще (т О соответствует дну) рзвен
m 1h
Atmi Јj у Н n 1 Vn Zno , ZB Zno
+
At
mo
где Zs - глубина воды в месте зондирования;
hn, Vn - толщина слоя грунта между (п- 1)-й и n-й границами и скорость звука в нем; g
€ - скорость звука в воде.
Если в каждом цикле зондированияглу- бинь источника в момент излучения Zn(ti) и приемника в момент приема того же отражения Zn(ti + Д tmi) отличаются от опорных значений, то появляется паразитный временной сдвиг г (т) для отражения от т-й границы в I-м цикле.
Этот сдвиг может быть представлен в виде двух компонент.55
Первая из них
« -feM
HZi
°. . Zn (t| -Ы) -Zno СС
одинакова для всех регистрируемых значений принятого в l-том цикле зондирования сигнала U(t), т.е. представляет собой сдвиг всего сигнала U(t). Вторая компонента,
Г2г(т) (L±ll
(3)
5 10 1520 2530
35
40
g
55
это переменный з процессе регистрации сигнала СДРИГ (неодинаковый сдвиг разных его значений), который является результатом допплеровского изменения временного масштаба U(t) относительно эхо-сигнала E(t) из-за изменения 2П во зремя регистрации.
Компенсация влияния первой компоненты паразитного сдвига основана из том, что корреляция не нарушается, если вклад s интервалы &гт одмнзков во всех циклах зокдироезния. Это условие, согласно (2), выполняется, если r + riz| const, т.е. при переменной задержке начала регистрации.
Компенсаций влияния второй компоненты паразитного сдвига достигается изменением временного масштаба U(t) путем его растяжения при увеличении Zn, и сжатия, если Zn уменьшается.
Такое выполнение способа сейсморазведки на акваториях позволяет при изменении положений источника v, приемника сейсмических сигналов по вертикали достигнуть разрешения способности сэгсморазвед- ки, близкой к величине разрешающей способности зондирующего сигнала г с разрезу.
Формула и з с С4 р г т е н v. я
Способ сейсмсрззве-дш на акваториях, заключающийся е одновременной буксировке судном-носителем источника и приемника сейсмических сигналов при циклическом излучении зондирующего сигнала посредством источника, помем Зхо- сигнзла Е(г) посредствен преемника с преобразованием en.; в электрический сигнал U(t) и регистрации сигнала lj{ i), производимой с задержкой т относительно момента указанного излучения, отличаю щ и с я тем, что, с целью поеьлиэыпя оазрешающей способности сейсморазведки, при буксировке измеряют глубину погружения Zn и Zn соответственно источника и приемника сейсмических сигналов, задают опорные значения задержки га и глубин погружения источника и приемника сейсмических сигналов, указанную -задержку т в каждом цикле зондирований корректируют относительно опорного значения задержки
введением поправок на отклонение глубин погружения ZM в момент излучения и Zn в момент начала регистрации от их опорных
значений, а при регистрации изменяют временной масштаб U(t) на основе измерений приращений Zn за время регистрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОРСКОЙ СЕЙСМОРАЗВЕДКИ | 2012 |
|
RU2502091C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| Способ сейсморазведки на акваториях | 1989 |
|
SU1702333A1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1997 |
|
RU2145097C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ КОМПЛЕКСНОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2022301C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО "ДИФФЕРЕНЦИАЛЬНЫЙ РАДАР" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2148842C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ВЫСОТЫ ОБЛАЧНЫХ СЛОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2361237C2 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2010 |
|
RU2457515C2 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2072534C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ГЕОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА МОРСКИХ НЕФТЕГАЗОНОСНЫХ АКВАТОРИЙ | 2012 |
|
RU2513630C1 |
Изобретение относится к способам сейсмических исследований районов, покрытых водой, преимущественно методом непрерывного сейсмического профилирования. Целью изобретения является повышение разрешающей способности сейсморазведки, Предлагаемый способ заключается в следующем. Судном-носителем буксируют источник и приемник сейсмических сигналов, одновременно определяя глубину их погружения Zi- и Zn. Циклически излучают зондирующий сиг ал посредством источника, поинимают оч раженный сигнал посредством приемника с преобразованием его в электрический сигнал U(t). В каждом цикле зондирования последний регистрируют с задержкой г относительно момента излучения. Ее величину короектчру.от относительно наперед заданного знччечия введением погтазок на отклонение Zi ; адомеит и Zjj в момент качала пзгнс ря ииотихопор- йых значений. 8 процессе реп с-.сацми вое- меннсй MdCuJT.5 U(t1 ичме .т- на основе изменений Zn, восста ав рзч той этом временной масштаб страже .кого сигнала. 1 ил. СО
| Шеррифф Р., Гелдарт Л | |||
| Сейсморазведка, т.1 | |||
| - М.: Мир, 1987, с | |||
| Зажим для канатной тяги | 1919 |
|
SU358A1 |
| Океанология | |||
| Геофизика океана | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
