Изобретение относится к области ракетной техники, а более конкретно к крылатым ракетам (КР) авиационного базирования. Изобретение описывает устройство, обеспечивающее стабилизацию и управление КР на начальном участке полета, сразу после отделения от самолета, и может найти применение, преимущественно, на ракетах, изначально разработанных для других типов носителей, например - морских или наземных, и адаптируемых к условиям авиационного базирования.
Одним из основных требований, предъявляемым к авиационным КР, является наиболее компактное их размещение на самолетах-носителях. С этой целью применяют различные технические решения, такие как: складывание крыла ракет при размещении на носителях, например - КР 3М80 («Москит») и Х-35 (А.В.Карпенко, С.М.Ганин «Отечественные авиационные тактические ракеты», военно-технический сборник «Бастион» №1, 2000, С.-Петербург, стр.56-59 и 73-74); размещение ракет на самолете в положении, развернутом вокруг продольной оси, обеспечивающем рациональную конфигурации КР на подвеске, в сочетании с послестартовым разворотом в исходное (полетное) положение, описанное в заявке на изобретение «Способ применения авиационной КР с воздушно-реактивной двигательной установкой», поданной одновременно с настоящей заявкой.
Однако складывание крыла, как правило, лишает ракету управляемости до момента его полного раскрытия, а для выполнения разворота КР в полетное положение могут потребоваться меры по повышению эффективности органов управления, например, в случае неблагоприятной начальной центровки, характерной для ракет с тандемным или встроенным твердотопливным разгонным двигателем. В подобных случаях, которые, как правило, возникают при адаптации к условиям авиационного базирования ракет, ранее разработанных для других типов носителей, применяют специальные устройства, обеспечивающие стабилизацию КР на время прохождения переходных процессов.
Наиболее близким по совокупности признаков с заявленным изобретением является устройство стабилизации, примененное на авиационном варианте КР «Метеорит» («ФГУП «НПО Машиностроения. 60 лет самоотверженного труда во имя мира», изд. дом «Оружие и технологии России», М., 2004, стр.81, 82, 229). Известное устройство стабилизации (см. фото из указанного источника, приведенное в приложении) выполнено в виде отделяемого от ракеты хвостового обтекателя, снабженного тремя аэродинамическими рулями. Его функционирование обеспечивают приводы и механизмы управления рулями, размещенные в полости обтекателя, а отделение от ракеты - специальные быстроразъемные соединения. В качестве таковых, как правило, используются механические пиротехнические средства (пироболты или пиротолкатели) и отрывные электрические разъемы.
Однако, применительно к малогабаритным КР, совместное размещение необходимого оборудования в пределах ограниченного диаметра приводит к увеличению длины и нерациональным внешним формам устройства стабилизации. Реализация же подобных компоновочных решений, применительно к КР с комбинированными двигательными установками на основе ПВРД, например, выполненным по компоновочной схеме, описанной в патентах РФ №2117907 и №2215981 (МПК F42В 15/00), сопряжена с дополнительными сложностями.
Во-первых, особенности конструкции комбинированной двигательной установки данной КР, которая представляет собой прямоточный маршевый двигатель (ПВРД) с несущим (то есть являющимся элементом фюзеляжа) корпусом и встроенным в него разгонным ракетным двигателем на твердом топливе (РДТТ), делают практически невозможной проводку электрокоммуникаций к устройству стабилизации в пределах диаметра фюзеляжа ракеты. Также существенно усложнена компоновка быстроразъемных соединений на стыке такой КР с устройством стабилизации. Это приводит к необходимости организации гаргротов и блистеров, существенно выступающих за обводы ракеты, а значит - увеличению ее аэродинамического сопротивления в целом.
Во-вторых, большая часть топлива встроенного разгонного РДТТ сосредоточена в хвостовой части КР, что, в свою очередь, позволяет судить о неблагоприятной начальной центровке ракеты. В сочетании с относительно небольшим плечом установки аэродинамических рулей (см. фиг.1 описания изобретения по патенту №2215981), это чревато ситуацией возможной статической неустойчивости КР в конфигурации без дополнительных стабилизующих поверхностей. Данное обстоятельство, возникающее после отделения устройства стабилизации и действующее до момента запуска разгонного РДТТ (то есть - задействования его эффективных газодинамических органов управления), является основанием для «ужесточения требований» по синхронизации выполнения указанных операций.
Задачей, решаемой изобретением, является:
- сокращение общего количества бортовых агрегатов, необходимых для обеспечения стабилизации и управления ракетой на начальном этапе ее автономного полета, включая оборудование, размещаемое в корпусе устройства стабилизации,
- обеспечение непрерывного управления КР на указанном этапе полета за счет минимизации времени прохождения переходных процессов,
- ограничение негативного влияния на аэродинамические характеристики КР от внедрения устройства стабилизации в состав ракеты при адаптации последней к условиям авиационного базирования.
Эта задача решается благодаря тому, что в известном устройстве стабилизации авиационной крылатой ракеты, содержащем корпус, установленный с возможностью отделения на хвостовой части ракеты, аэродинамические рули, смонтированные на корпусе, приводы и механизмы управления рулями, согласно заявленному изобретению корпус устройства стабилизации выполнен в виде выпуклой крышки, герметизирующей сопло твердотопливного разгонного двигателя ракеты, а органы управления из состава этого устройства - в виде четырех пар кинематически связанных между собой аэродинамических рулей и газовых рулей твердотопливного разгонного двигателя, причем каждая пара рулей устройства стабилизации размещена в плоскостях установки аэродинамических рулей ракеты и связана с соответствующим приводом руля ракеты посредством тяг управления и механизма управления рулями устройства стабилизации, который выполнен с возможностью отделения звеньев, управляющих положением аэродинамического руля устройства, а также - разделения с тягами управления от привода руля ракеты.
Технический результат использования изобретения состоит в том, что оно позволяет создать конструкцию устройства стабилизации, которая, по сравнению с традиционными, характеризуется упрощенной структурой и значительно меньшими массой и габаритами. Это обеспечивается за счет применения решений, позволяющих агрегатам авиационной КР совмещать несколько функций, в том числе - возлагаемых на устройство стабилизации, например:
- исполнение сопловой заглушки разгонного РДТТ в виде выпуклой крышки позволяет ей, наряду с основным предназначением, а именно - герметизацией внутренней полости и обеспечением заданного режима запуска двигателя, выполнять функции корпуса устройства стабилизации. При этом отпадает необходимость в использовании каких-либо дополнительных узлов для отделения корпуса устройства от ракеты и обеспечивается управление КР без промежутков на «передачу управления» от одних (аэродинамических) органов управления устройства стабилизации другим (газодинамическим);
- кинематическая связь органов управления устройства стабилизации между собой, а также приводом, размещенным на борту ракеты, позволяет этому приводу управлять не только соответствующим аэродинамическим рулем маршевой ступени КР, но и парой рулей устройства стабилизации, установленной в одной с ним плоскости. При этом тяги от привода, прокладываемые по наружной поверхности хвостового отсека ракеты, могут быть выполнены в виде тросов или металлических лент, почти не выступающих за обводы ее фюзеляжа, а требуемые передаточные числа между органами управления ракеты и устройства стабилизации могут быть обеспечены за счет выбора соответствующего соотношения плеч качалок механизма управления рулями.
Благодаря указанной совокупности технических решений, из традиционного состава устройства стабилизации могут быть исключены специальные пиросредства крепления и отделения устройства от ракеты и узкоспециализированные приводы. Соответственно отпадает необходимость в электрооборудовании устройства стабилизации, а также - проводке коммуникаций и применении электроразъемов, которые связывали бы его с бортовой системой управления ракеты.
Сущность предлагаемого устройства проиллюстрирована на фиг.1-7.
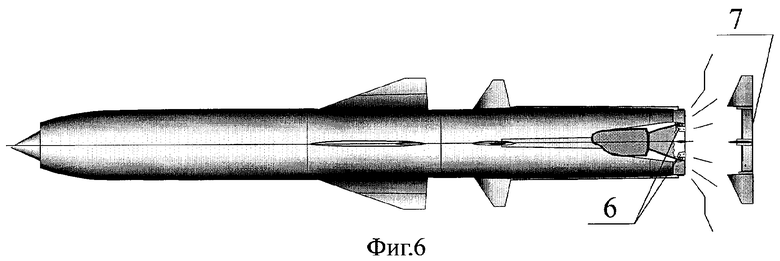
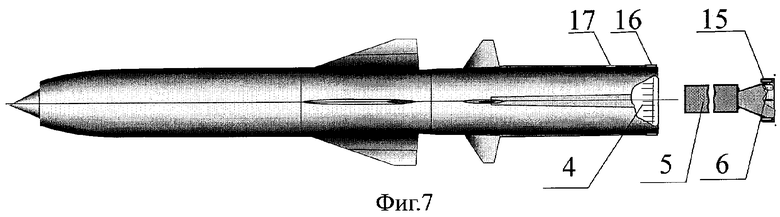
На фиг.1 представлен общий вид КР в сборе с устройством стабилизации при размещении ракеты на самолете-носителе (в конкретном примере КР размещена на самолете в соответствии с техническим решением по заявке на «Способ применения авиационной КР...», то есть в положении, развернутом вокруг продольной оси на угол 45°). На фиг.2 - вид сзади на КР в указанном положении. На фиг.3 и 4 показана хвостовая часть КР и устройство стабилизации в частичном разрезе. На фиг.5-7 показана схема функционирования КР с устройством стабилизации после отделения ракеты от самолета.
Крылатая ракета (1) выполнена по нормальной аэродинамической схеме и содержит осесимметричный фюзеляж, крыло и оперение, которое выполнено в виде четырех цельноповоротных аэродинамических рулей (2). Рули (2) установлены в плоскостях I, II, III и IV ракеты и управляются посредством приводов (3), размещенных внутри фюзеляжа.
КР (1) оснащена комбинированной двигательной установкой, которая представляет собой ПВРД (4) с несущим корпусом и встроенным в него разгонным РДТТ (5), который имеет газодинамические органы управления, выполненные в виде четырех газовых рулей (6).
На хвостовой части КР (1) установлено устройство стабилизации (7), которое состоит из корпуса и органов управления.
Корпус устройства стабилизации (7) выполнен в виде крышки (8), герметизирующей сопло (9) разгонного РДТТ (5). Крышка (8) имеет цилиндрическую боковую поверхность, выступающую за срез сопла (9), и скреплена с последним тарированными болтами (10), рассчитанными на разрушение от действия растягивающей силы определенной величины.
Органы управления устройства стабилизации (7) выполнены в виде четырех пар кинематически связанных между собой цельноповоротных аэродинамических рулей (11) и упомянутых выше газовых рулей (6) РДТТ (5), которые входят в состав устройства стабилизации функционально.
Аэродинамические рули (11) смонтированы на боковой поверхности крышки (8) посредством кронштейнов (12), в которые запрессованы оси вращения указанных рулей. Причем каждый аэродинамический руль (11) установлен соосно с соответствующим газовым рулем (6) и взаимодействует с качалкой (13) последнего. Для чего в плоскость руля (11) запрессован направляющий штырь (14), в кронштейне (12) выполнен радиальный паз для перемещения штыря (14), а качалка (13) газового руля (6) имеет водило с прорезью под указанный штырь.
Спаренные таким образом рули (11) и (6) устройства стабилизации (7) размещены в плоскостях I, II, III и IV ракеты, то есть в плоскостях установки аэродинамических рулей (2) КР (1). При этом каждая качалка (13) газового руля (6), которая на плече, противоположном водилу, имеет зубчатый сектор, через промежуточную шестерню (15) взаимодействует с качалкой-шестерней (16), закрепленной на заднем торце фюзеляжа КР (1). В свою очередь, упомянутая качалка-шестерня (16) посредством ленточных тяг (17), проложенных по наружной поверхности хвостового отсека КР (1), связана с соответствующим приводом (3) руля (2) ракеты. Таким образом, кинематическая система, образованная качалкой-шестерней (16), промежуточной шестерней (15), качалкой (13) газового руля (6) и связанным с ней направляющим штырем (14) аэродинамического руля (11), представляет собой механизм управления (18) парой рулей (6) и (11) из состава устройства стабилизации (7).
Указанное устройство функционирует следующим образом.
По команде от системы управления оружием самолета раскрываются захваты авиационного пускового устройства, в результате чего КР (1) отделяется от носителя и начинает свое автономное движение. КР (1) в режиме планирующего полета удаляется от самолета, при этом ее положение стабилизируется по данным бортовой системы управления (БСУ) с помощью исполнительных органов ракеты (приводов (3) и аэродинамических рулей (2)) и стабилизирующего устройства (7) (тяг (17), механизмов (18) и аэродинамических рулей (11)). Необходимо отметить, что рули (11) устройства стабилизации (7) на данном участке полета КР (1) вносят основной вклад в общую эффективность органов управления, так как они, по сравнению с рулями (2) ракеты, имеют существенно большее плечо приложения усилия относительно центра масс ракеты.
По заданной временной задержке БСУ КР (1) выдает команду на выполнение программного разворота по крену на угол 45°, осуществление которого проводится посредством совместного отклонения аэродинамических рулей (2) и (11). При этом усилия приводов (3) создают на осях рулей (2) ракеты (1) управляющие моменты, которые через тяги (17) и звенья механизмов (18), а именно - качалки-шестерни (16), промежуточные шестерни (15), качалки (13) и взаимодействующие с ними направляющие штыри (14), передаются на аэродинамические рули (11) устройства стабилизации (7).
В результате выполнения разворота КР (1) занимает полетное положение, соответствующее вертикальной и горизонтальной ориентации ее плоскостей.
По удалении КР (1) на дистанцию безопасного для самолета-носителя запуска разгонного РДТТ (5) (порядка нескольких десятков метров) БСУ ракеты выдает команду на его запуск. В результате срабатывает воспламенитель твердотопливного заряда РДТТ (5) и давление в его камере сгорания начинает интенсивно нарастать. По достижении заданной величины давления в камере сгорания РДТТ (5) разрушаются тарированные болты (10), удерживавшие крышку (8) на сопле (9), и крышка (8) вместе с закрепленными на ней аэродинамическими рулями (11) отделяется от КР (1). При этом направляющие штыри (14) рулей (11) выходят из зацепления с водилами качалок (13), разрывая тем самым цепи механизмов (18), ранее управлявшие положением рулей (11). В дальнейшем, управляющие моменты, создаваемые приводами (3), прикладываются только к аэродинамическим рулям (2) КР (1) и газовым рулям (6) РДТТ (5).
Под действием тяги разгонного РДТТ (5) КР (1) резко набирает скорость, при этом газовые рули (6), отклоняемые в потоке реактивной струи, истекающей из сопла (9) двигателя, вносят основной вклад в обеспечение стабилизации ракеты и выполнение возможных программных маневров. По мере роста скорости КР (1) (а значит, скоростного напора, действующего на несущие и управляющие поверхности ракеты) и выгорания топлива разгонного РДТТ (5) (а значит, смещения вперед центра масс ракеты) растет эффективность аэродинамических рулей (2), которые к концу разгонного участка полета ракеты приобретают способность к «самостоятельному» управлению ее движением.
При спаде тяги разгонного РДТТ (5) до определенной величины, давлением воздуха, поступающего в воздушный тракт двигательной установки ракеты, корпус отработанного двигателя выбрасывается из полости ПВРД (4). При этом промежуточные шестерни (15) выходят из зацепления с качалками-шестернями (16) и функционировавшие ранее звенья управления газовыми рулями (6) механизмов (18) разделяются в зоне заднего среза фюзеляжа КР (1).
В результате «высвобождается» воздушный тракт ПВРД (4) и после осуществления операций по его запуску КР (1) начинает полет в маршевом режиме, в процессе которого управление движением ракеты осуществляется аэродинамическими рулями (2).
Таким образом, можно заключить, что использование предлагаемого решения позволяет упростить структуру, сократить общее количество оборудования, уменьшить габариты и массу устройства стабилизации, что, в свою очередь обеспечивает снижение издержек на его разработку и изготовление. При этом положительный эффект от внедрения такого устройства в состав авиационного варианта малогабаритной КР не сопровождается снижением ее аэродинамических характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАРТА АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ С ВОЗДУШНО-РЕАКТИВНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 2006 |
|
RU2314481C2 |
| РАКЕТА С ПОДВОДНЫМ СТАРТОМ | 2007 |
|
RU2352894C1 |
| ТВЕРДОТОПЛИВНАЯ РАЗГОННАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2001 |
|
RU2209331C2 |
| ПЛАНЕР КРЫЛАТОЙ РАКЕТЫ | 2004 |
|
RU2287771C2 |
| ТВЕРДОТОПЛИВНАЯ РАЗГОННАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2175726C1 |
| УСТРОЙСТВО ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2013 |
|
RU2559415C2 |
| УСТРОЙСТВО ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2013 |
|
RU2546747C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ | 2013 |
|
RU2535958C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ | 2013 |
|
RU2534476C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
Изобретение относится к области ракетной техники, в частности к устройствам стабилизации авиационных крылатых ракет на начальном этапе автономного полета. Сущность изобретения заключается в том, что корпус устройства стабилизации выполнен в виде выпуклой крышки, герметизирующей сопло твердотопливного разгонного двигателя ракеты, а органы управления - в виде четырех пар кинематически связанных между собой аэродинамических рулей и газовых рулей твердотопливного разгонного двигателя, каждая из которых размещена в плоскости установки аэродинамического руля маршевой ступени ракеты и связана с приводом указанного руля посредством тяг управления. Механизм управления рулями устройства стабилизации выполнен с возможностью отделения звеньев, управляющих положением аэродинамического руля устройства, а также - разделения с тягами управления от привода руля маршевой ступени. Реализация изобретения позволяет упростить структуру и уменьшить габариты устройства стабилизации, а также повысить аэродинамические характеристики крылатой ракеты. 7 ил.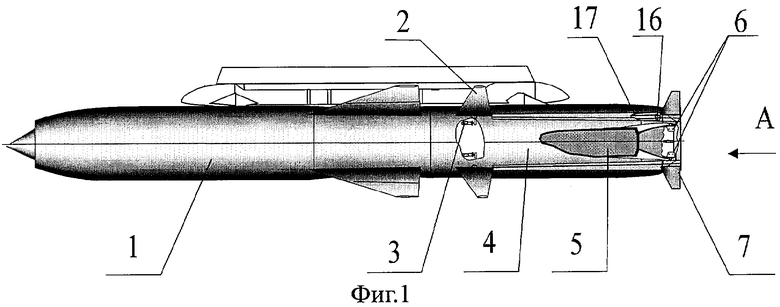
Устройство стабилизации авиационной крылатой ракеты, содержащее корпус, установленный с возможностью отделения на хвостовой части ракеты, органы управления в виде рулей, смонтированных на корпусе, привода и механизмы управления рулями, отличающееся тем, что корпус устройства стабилизации выполнен в виде выпуклой крышки, герметизирующей сопло твердотопливного разгонного двигателя ракеты, а органы управления - в виде четырех пар кинематически связанных между собой аэродинамических рулей и газовых рулей твердотопливного разгонного двигателя, причем каждая пара рулей устройства стабилизации размещена в плоскостях установки аэродинамических рулей ракеты и связана с соответствующим приводом руля ракеты посредством тяг управления и механизма управления рулями устройства стабилизации, который выполнен с возможностью отделения звеньев, управляющих положением аэродинамического руля устройства, а также - разделения с тягами управления от привода руля ракеты.
| "ФГУП "НПО Машиностроения | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| - М.: Оружие и технологии России, 2004, с.81, 82, 229 | |||
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| КРЫЛАТАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2001 |
|
RU2215981C2 |
| US 5417393 А, 23.05.1995 | |||
| DE 19959357 A1, 13.06.2001 | |||
| Система доставки лигатур для аксиальной фиксации структур тазового дна при пролапсе тазовых органов и стрессовом недержании мочи | 2020 |
|
RU2739682C1 |
| JP 2003262500 A, 19.09.2003. | |||

