Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) с инверсным синтезированием апертуры антенны при формировании опорной функции для обработки траекторного сигнала.
Известен способ определения угла наблюдения (ракурса) воздушной цели в обзорной наземной РЛС (Дымов А.И., Альбац М.Е., Бонч-Бруевич А.М. Радиотехнические системы. - М.: Сов. радио, 1975. - с.247-253).
Сущность способа состоит в следующем. Обзорная наземная РЛС с известными координатами, работающая в импульсном режиме, осуществляет круговое сканирование узким лучом диаграммы направленности антенны в горизонтальной плоскости. Измеренные координаты воздушной цели в полярной системе координат «азимут-дальность» переводятся в координаты (X, Y) прямоугольной системы координат. Для определения угла наблюдения полетов воздушной цели используют вторичную обработку радиолокационной информации наземной РЛС. Через период обзора пространства РЛС после обнаружения и измерения координат начальной отметки цели происходит обнаружение и измерение координат второй отметки цели. Знание координат начальной и второй отметок цели в ходе вторичной обработки радиолокационной информации позволяет определить величину угла наблюдения воздушной цели.
Недостатком такого способа определения ракурса воздушной цели является низкая точность и возможность вычисления угла наблюдения цели только после второго периода обзора наземной РЛС.
В качестве прототипа выбран способ определения ракурса воздушной цели в наземной РЛС, изложенный в (Маркович О.С., Машкин А.В., Сенчаков Г.В. Метод определения ракурса воздушной цели по результатам обработки траекторных измерений. - Радиотехника, 2004, №5. - с.37-39).
Сущность способа определения ракурса воздушной цели в наземной РЛС заключается в том, что в РЛС измеряются сферические координаты воздушной цели - дальность Д, угол места ε и азимут β, которые связаны с декартовыми координатами X, Y, Z следующим образом:

Ракурс воздушной цели μ определяется по формуле:

где  - производные от соответствующих декартовых координат X, Y, Z.
- производные от соответствующих декартовых координат X, Y, Z.
Недостатком такого способа является низкая точность определения ракурса воздушной цели.
Техническим результатом предлагаемого способа является расширение его области применения для определения угла наблюдения воздушной цели.
Сущность предлагаемого способа определения угла наблюдения воздушной цели в наземной радиолокационной системе заключается в том, что измеряют частоту Доплера отраженных от движущейся цели сигналов в наземной РЛС fдРЛС,а также частоту Доплера fдR отраженных сигналов в дополнительной приемной позиции R, разнесенной в пространстве относительно наземной РЛС на базовое расстояние RB, измеряют угол θ между направлениями «дополнительная приемная позиция R - цель Ц» и «дополнительная приемная позиция R - РЛС», угол γ между направлениями «РЛС - цель Ц» и «РЛС - дополнительная приемная позиция R», вычисляют бистатический угол β=180°-(θ+γ), а угол наблюдения воздушной цели определяют по формуле:

где fдРЛС - частота Доплера, измеряемая в наземной РЛС; fдR - частота Доплера, измеряемая в дополнительной приемной позиции R; β - бистатический угол между направлениями «РЛС - цель Ц» и «дополнительная приемная позиция R - цель Ц».
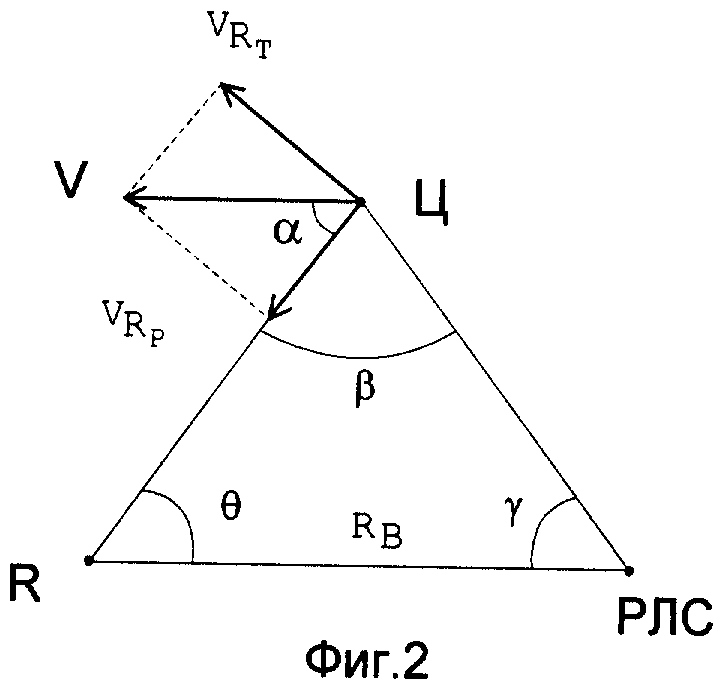
Сущность способа поясняется следующим. Пусть цель Ц летит под произвольным неизвестным углом μ к линии визирования цели со стороны наземной РЛС (фиг.1) с путевой скоростью V. Тогда измеряемая частота Доплера сигнала, отраженного от Ц, в РЛС определяется выражением:

где λ - рабочая длина волны, используемая в наземной РЛС; V·cosμ=VРЛСр - радиальная скорость полета цели относительно наземной РЛС.
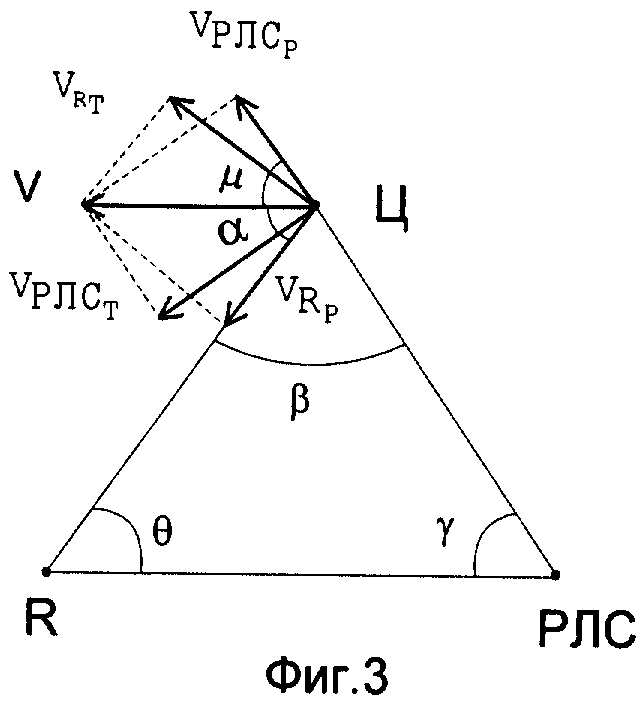
Для определения угла наблюдения цели μ введем дополнительную приемную позицию R (фиг.2), разнесенную в пространстве относительно наземной РЛС на базовое расстояние RB. При этом частота Доплера, измеряемая в дополнительной приемной позиции R, определяется выражением:

где α - угол между вектором путевой скорости V и линией визирования цели со стороны приемной позиции R; первое слагаемое выражения (3) представляет собой частоту Доплера, возникающую за счет прохождения излученного радиосигнала расстояния РЛС - цель; второе слагаемое выражения (3) представляет собой частоту Доплера, возникающую за счет прохождения отраженного радиосигнала расстояния цель - дополнительная приемная позиция R.
С учетом выражений (2) и (3) отношение fдR к fдРЛС равно:

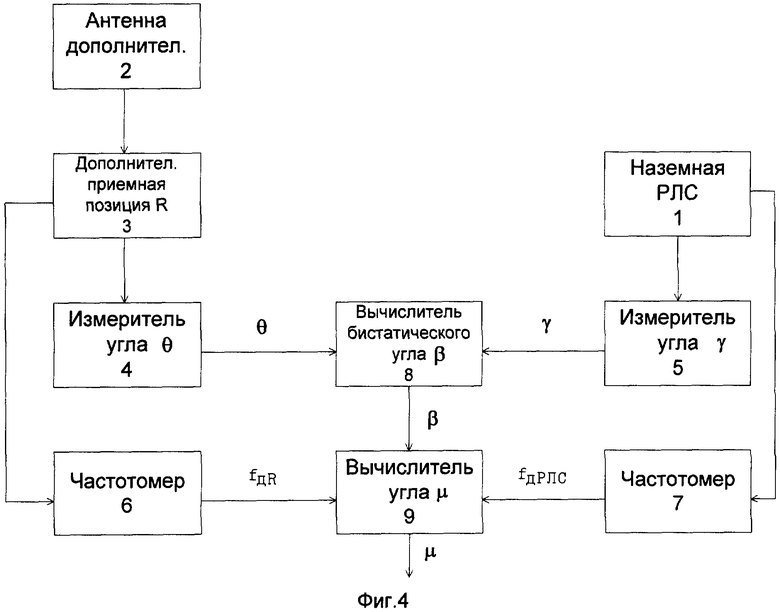
При совмещении векторных диаграмм, показанных на фиг.1 и 2, в единую диаграмму (фиг.3), получено, что α+β+μ=180°. С учетом того, что α=180°-β-μ, выражение (4) принимает вид:

После элементарных преобразований получим угол наблюдения цели μ:

На фиг.4 представлена схема устройства наземной радиолокационной системы для реализации предложенного способа. Она состоит из наземной РЛС 1; антенны дополнительной 2 и дополнительной приемной позиции R 3, совмещенных в пространстве; измерителя 4 угла θ; измерителя 5 угла γ; частотомера 6; частотомера 7; вычислителя бистатического угла β 8; вычислителя угла наблюдения μ 9.
Узкие в азимутальной плоскости лучи антенны наземной РЛС 1 и антенны дополнительной 2 направлены на цель Ц. Цель облучается антенной наземной РЛС высокочастотными импульсами, формируемыми в передатчике РЛС. Эхо-сигналы поступают на вход приемника наземной РЛС и вход дополнительной приемной позиции R 3, причем антенна дополнительная и дополнительная приемная позиция R разнесены в пространстве относительно наземной РЛС на произвольное базовое расстояние RB. В измерителе 5 вычисляется угол γ между направлениями «РЛС - цель Ц» и «РЛС - дополнительная приемная позиция R». В измерителе 4 определяется угол θ между направлениями «дополнительная приемная позиция R - цель Ц» и «дополнительная приемная позиция R - РЛС». Измеренные углы γ и θ подаются в вычислитель 8 бистатического угла β, который высчитывают как разность 180°-(θ+γ) (см. фиг.2). В частотомере 7 измеряется частота Доплера fдРЛС, а в частотомере 6 - частота Доплера fдR.
Измеренные значения fдРЛС и fдR, а также вычисленное значение угла β поступают в вычислитель угла наблюдения μ 9. В этом вычислителе угол наблюдения цели μ определяется по формуле (1).
Таким образом, данный способ предоставляет возможность получить угол наблюдения (ракурс) воздушной цели μ в наземной радиолокационной системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2273033C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2506607C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ НЕРАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489730C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2492504C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516221C2 |
| СПОСОБ И КОМПЛЕКС БАРЬЕРНОГО ЗЕНИТНОГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА БАЗЕ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2015 |
|
RU2615988C1 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
Изобретение относится к радиолокации. Достигаемым техническим результатом изобретения является расширение области применения способа определения ракурса воздушной цели в случае формирования опорной функции при обработке изображений в наземных РЛС с инверсным синтезированием апертуры антенны. Сущность изобретения заключается в том, что для определения ракурса воздушной цели, кроме частоты Доплера отраженных от воздушной цели сигналов в наземной РЛС дополнительно измеряются и вычисляются частота Доплера в дополнительной приемной позиции, угол между направлениями «РЛС - цель» и «РЛС - дополнительная приемная позиция», угол между направлениями «дополнительная приемная позиция - цель» и «дополнительная приемная позиция - РЛС», бистатический угол между направлениями «цель - РЛС» и «цель - дополнительная приемная позиция». 4 ил.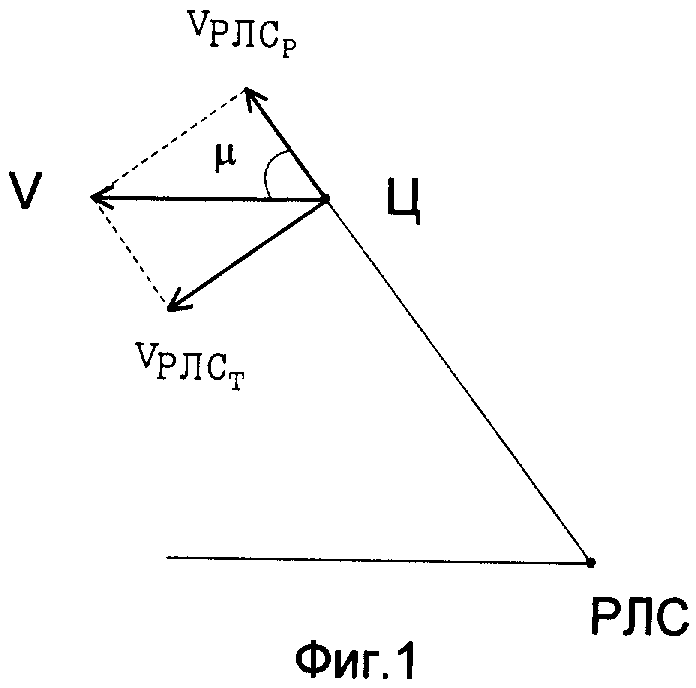
Способ определения угла наблюдения (ракурса) воздушной цели в наземной радиолокационной системе (РЛС), заключающийся в том, что измеряют частоту Доплера отраженных от движущейся цели сигналов в наземной РЛС fдРЛС, отличающийся тем, что измеряют частоту Доплера fдR отраженных сигналов в дополнительной приемной позиции, разнесенной в пространстве относительно наземной РЛС на базовое расстояние RB, угол θ между направлениями «дополнительная приемная позиция R - цель Ц» и «дополнительная приемная позиция R - РЛС», угол γ между направлениями «РЛС - цель Ц» и «РЛС - дополнительная приемная позиция R», вычисляют бистатический угол β=180°-(θ+γ), при этом ракурс воздушной цели определяют по формуле

где fдРЛС - частота Доплера, измеряемая в наземной РЛС; fдR - частота Доплера, измеряемая в дополнительной приемной позиции R; β - бистатический угол между направлениями «цель Ц - дополнительная приемная позиция R» и «цель Ц - РЛС».
| МАРКЕВИЧ О.С | |||
| и др | |||
| Метод определения ракурса воздушной цели по результатам обработки траекторных измерений | |||
| - Радиотехника, 2004, №5, с.37-39 | |||
| RU 2003100762 А, 20.07.2000 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| US 5280294 A, 18.01.1994 | |||
| US 4916455, 10.04.1990 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

