Изобретение относится к разряду радиолокационных устройств и предназначено для аппаратурной реализации метода получения двумерных радиолокационных изображений (РЛИ) воздушных целей в интересах распознавания их классов [1].
Известна радиолокационная станция с инверсным радиолокационным синтезированием апертуры (ИРСА), используемая в Тихоокеанском ракетном испытательном центре США, алгоритм обработки сигналов в которой разработан специально для получения двумерных РЛИ целей [2]. В состав указанной РЛС входят задающий генератор (на диоде Ганна), делитель мощности (четырехплечий), генератор пилообразного напряжения, линия задержки, передающая антенна, 1-й и 2-й смесители, усилитель высокой (зондирующей) частоты, приемная антенна, фильтр высоких частот, частотный дискриминатор, усилитель промежуточной частоты, фильтр подавления неоднозначности, аналого-цифровой преобразователь (АЦП), цифровой магнитофон, анализатор быстрого преобразования Фурье (реального масштаба времени), вычислитель, пульт управления магнитофоном, графопостроитель, декодирующее устройство углового положения, установка для вращения цели. При этом задающий генератор соединен своим входом с выходом генератора пилообразного напряжения, а выходом - со входом делителя мощности, 1-й выход которого подключен к передающей антенне, второй - к 1-му входу 1-го смесителя, третий - ко входу линии задержки, четвертый - ко 2-му входу 2-го смесителя, 1-й вход которого соединен с выходом линии задержки, а выход - со входом частотного дискриминатора, выход которого соединен со входом генератора пилообразного напряжения. Выход приемной антенны подключен ко входу усилителя высокой частоты, выход которого соединен со 2-м входом 1-го смесителя, выход которого подключен ко входу фильтра высоких частот, выход которого соединен со входом усилителя промежуточной частоты, выход которого соединен одновременно со входом фильтра подавления неоднозначности и входом анализатора быстрого преобразования Фурье (БПФ), выход которого подключен ко входу вычислителя, выход которого соединен со входом графопостроителя. Кроме того, выход фильтра подавления неоднозначности соединен со входом АЦП, выход которого соединен со входом цифрового магнитофона, а установка для вращения цели механически связана с декодирующим устройством углового положения, электрический сигнал с выхода которого подается на 1-й вход пульта управления магнитофоном, на 2-й и 3-й входы которого подаются соответственно сигналы установки длительности записи и установки интервалов углов.
Недостатком указанной РЛС с ИРСА является то, что в ней используются сложные частотно-модулированные (в полосе до 3 ГГц) импульсные сигналы (позволяющие достичь разрешающей способности по дальности до 5 см), что приводит к усложнению электронной аппаратуры обработки радиолокационной информации, росту ее стоимости, габаритов и т. д. Использование формируемых данной РЛС с ИРСА двумерных РЛИ в алгоритмах автоматического радиолокационного распознавания (РЛР) целей на средних и малых дальностях невозможно, так как двумерное РЛИ цели можно получить на графопостроителе только через 15 с, что слишком много.
Известна также радиолокационная станция LRIR (Long-Range Imaging Radar), с помощью которой можно получать двумерные РЛИ воздушных и космических целей методом инверсного радиолокационного синтезирования апертуры [3]. Указанная РЛС содержит задающий генератор, ключ, когерентный передатчик, антенный переключатель (циркулятор), антенну, когерентный приемник, смеситель, АЦП, первый вычислитель БПФ (для получения высокого разрешения по дальности), блок оценки погрешности вычисления дальности, блок регистрации данных, второй вычислитель БПФ (для получения высокого разрешения по азимуту), блок отображения РЛИ, моноимпульсную систему определения азимута и угла места цели, систему сопровождения цели (ССЦ), систему управления (ориентации) антенной. При этом выход задающего генератора через ключ соединен либо с 1-м входом смесителя, либо со входом когерентного передатчика, выход которого соединен со входом антенного переключателя (АП), соединенного с антенной, выход АП соединен со входом когерентного приемника, выходной сигнал которого подается на второй вход смесителя, выход которого соединен со входом АЦП, выход которого соединен со входом 1-го вычислителя БПФ, выход которого соединен со входом блока оценки погрешности вычисления дальности, 1-й выход которого соединен с 1-м входом ССЦ, а второй - с 1-м входом блока регистрации данных, выход которого подключен ко входу 2-го вычислителя БПФ, выход которого соединен со входом блока отображения РЛИ. Первый выход ССЦ соединен одновременно со входом задающего генератора и 3-м входом блока регистрации данных, 2-й вход которого соединен с выходом моноимпульсной системы определения азимута и угла места цели, а также со 2-м входом ССЦ, 2-й выход которой соединен со входом системы управления антенной.
Недостатком данной РЛС является то, что она использует в качестве зондирующего сложный сигнал с эффективной шириной полосы спектра импульсов B=1 ГГц, что ведет к существенному усложнению аппаратуры приема и обработки и снижению ее надежности. К тому же, РЛС LRIR обеспечивает хорошее качество РЛИ только тех объектов, скорости вращения которых значительны, чего нельзя сказать о прямолинейно летящих воздушных целях, скорость изменения ракурса которых не превосходит 1o/с. Кроме того, получаемые РЛС LRIR двумерные РЛИ целей проблематично использовать в автоматических системах РЛР, так как обработка и идентификация многоэлементных изображений сами по себе являются очень сложными процессами и не могут выполняться в реальном масштабе времени.
Целью изобретения является получение двумерных РЛИ сопровождаемых воздушных целей с помощью когерентных РЛС с ИРСА, использующих узкополосные зондирующие сигналы и обеспечивающих своевременное достоверное распознавание классов воздушных целей.
Поставленная цель достигается тем, что в состав известной, описанной выше РЛС [3], содержащей задающий генератор, ключ, когерентный передатчик, АП, антенну, АЦП, систему управления антенной (причем данная система предполагается двухканальной, то есть управляющей антенной по углу места и по азимуту и состоящей из 1-го усилителя, усиливающего сигнал ошибки по углу места, 2-го усилителя, усиливающего сигнал ошибки по азимуту, угломестного привода и азимутального привода, причем каждый привод включает в себя двигатель и редуктор), два вычислителя БПФ и блок отображения РЛИ, в которой выход задающего генератора соединен со входом 1-го ключа, 1-й выход которого подключен ко входу когерентного передатчика, выход которого соединен со входом антенного переключателя, а выход 1-го АЦП соединен со входом 1-го вычислителя БПФ, дополнительно вводят 2-й ключ, схему управления, 1-й и 2-й фазовые детекторы, амплитудный детектор, четыре АЦП, линию задержки, блок расчета параметров РЛИ (БРПРЛИ), блок радиолокационного распознавания (РЛР), систему измерения дальности (СИЛ), блок элементов линейной части приемника суммарного канала (БЭЛЧПСК), блок элементов линейной части приемника разностного угломестного канала (БЭЛЧПРУК), блок элементов линейной части приемника разностного азимутального канала (БЭЛЧПРАК), два потенциометрических датчика, пульт управления оператора, моноимпульсный облучатель (МИО), 1-ю и 2-ю схемы блокировки. При этом 1-й выход МИО соединяют с 1-м входом БЭЛЧПРУК, выход которого соединяют с 1-м входом 1-го фазового детектора, 2-й выход МИО подключают к 1-му входу БЭЛЧПРАК, выход которого соединяют с 1-м входом 2-го фазового детектора, последовательно соединяют 2-й ключ, линию задержки и 2-й АЦП, последовательно подключают БЭЛЧПСК, амплитудный детектор, СИД, 3-й АЦП, БРПРЛИ, к его 4-му и 5-му входам подключают выходы соответственно 4-го и 5-го АЦП. Второй выход 1-го ключа соединяют со 2-м входом БЭЛЧПРУК, 2-м входом БЭЛЧПРАК, 2-м входом БЭЛЧПСК, выход которого соединяют также со 2-м входом 1-го и 2-го фазовых детекторов и 1-м входом 2-го ключа, 2-й вход которого подключают к выходу пульта управления оператора, а выход - к 1-му входу 1-го АЦП, 2-й вход которого соединяют с выходом 1-й схемы блокировки, 2-м входом 2-го АЦП и входом 2-й схемы блокировки, выход которой подключают ко 2-му входу 3-го АЦП, 2-му входу 5-го АЦП и 2-му входу 4-го АЦП, 1-й вход которого соединяют с выходом 1-го потенциометрического датчика, вход которого механически связывают с выходом угломестного привода и 1-м механическим входом антенны, 2-й механический вход которой механически связывают с выходом привода азимутального и входом 2-го потенциометрического датчика, выход которого подключают к 1-му входу 5-го АЦП. Выход 1-го фазового детектора соединяют со входом 1-го усилителя, выход 2-го фазового детектора соединяют со 2-м входом 2-го усилителя, вход-выход антенны подключают ко второму вход-выходу МИО, 1-й вход-выход которого соединяют с вход-выходом АП, выход которого соединяют с 1-м входом БЭЛЧПСК, выход схемы управления подключают ко 2-му входу 1-го ключа и 2-му входу СИД, выход 2-го АЦП соединяют со входом 2-го вычислителя БПФ, выход которого подключают к 3-му входу БРПРЛИ. 2-й вход которого соединяют с выходом 1-го вычислителя БПФ, а выход - со входом блока РЛР и входом блока отображения РЛИ, выход линии задержки соединяют со входом 1-й схемы блокировки. Такое построение структурной схемы радиолокатора преобразует его в моноимпульсную РЛС сопровождения цели с суммарно-разностной обработкой узкополосного когерентного сигнала, способную на основе метода ИРСА строить двумерное РЛИ сопровождаемых целей и производить их РЛР.
Структурная схема предлагаемой РЛС с ИРСА и узкополосным когерентным зондированием представлена на фиг. 1.
Согласно данной схемы РЛС с ИРСА содержит 1-й усилитель 1, 1-й фазовый детектор 2, привод угломестный 3, БЭЛЧПРУК 4, схему управления 5, блок РЛР 6, 1-й потенциометрический датчик 7, антенну 8, МИО 9, АЛ 10, когерентный передатчик 11, 1-й ключ 12, задающий генератор 13, 2-й потенциометрический датчик 14, привод азимутальный 15, БЭЛЧПРАК 16, БЭЛЧПСК 17, блок отображения РЛИ 18, 2-й усилитель 19, 2-й фазовый детектор 20, амплитудный детектор 21, СИД 22, 3-й АЦП 23, 4-й АЦП 24, пульт управления операторами 25, 2-й ключ 26, 1-й АЦП 27, 1-й вычислитель БПФ 28, БРПРЛИ 29, 5-й АЦП 30, линию задержки 31, 1-ю схему блокировки 32, второй АЦП 33, 2-й вычислитель БПФ 34 и 2-ю схему блокировки 35.
Радиолокационная станция с инверсным синтезированием апертуры работает следующим образом.
Задающий генератор 13 через 1-й ключ 12 попеременно подает высокостабильные электромагнитные колебания то на вход когерентного передатчика 11, то одновременно на 2-е входы БЭЛЧПСК 17, БЭЛЧПРУК 4 и БЭЛЧПРАК 16. Схема управления 5 формирует импульсные сигналы с периодом повторения Tи, которые определяют период повторения зондирующих сигналов радиолокационной станции, а также управляют 1-м ключом 12, работой когерентного передатчика 11 и работой СИД 22. Указанные импульсы с выхода схемы управления 5 поступают на управляющий вход 1-го ключа 12, который на время их действия коммутирует выход задающего генератора 13 со входом когерентного передатчика 11. В остальное время (когда нет управляющего сигнала из блока 5) сигнал задающего генератора проходит на вторые входы БЭЛЧПСК 17, БЭЛЧПРУК 4 и БЭЛЧПРАК 16.
Когерентный передатчик 11 формирует сверхвысокочастотные импульсные сигналы, фазированные сигналом задающего генератора 13, и через АП 10 и МИО 9 передает их в антенну 8, которая излучает электромагнитные волны в направлении цели. Методы фазирования широко известны в радиолокации [4, с. 85-108; 5, с. 163-196] и не нуждаются в разъяснении, а вариант построения когерентного передатчика показан в [6, с. 61, рис.4.3]. Отразившись от цели, излученные сигналы с измененной структурой возвращаются к антенне 8, улавливаются ею и поступают на 2-й вход-выход МИО 9, устройство которого также широко известно в радиолокации [7, с.387, рис. 13,13]. МИО 9 имеет также 1-й вход-выход суммарного канала, выход разностного угломестного канала и выход разностного азимутального канала. Уровень сигналов в данных каналах зависит от положения цели относительно равносигнального направления. В разностных каналах сигнал появляется только тогда, когда имеет место отклонение цели от равносигнального направления в соответствующей плоскости. Таким образом, МИО 9 является главным элементом, обеспечивающим слежение антенной системы за целью. С 1-го вход-выхода МИО 9 (представляющего суммарный канал) сигнал через АП 10 подается на 1-й вход БЭЛЧПСК 17. Выход угломестного разностного канала МИО 9 подключен к 1-му входу БЭЛЧПРУК 4, а выход разностного азимутального канала МИО - к 1-му входу БЭЛЧПРАК 16.
Как видно из фиг. 1, начальная часть структурной схемы РЛС с ИРСА построена по классической схеме амплитудной суммарно-разностной моноимпульсной (без схемы автоматической регулировки усиления) системы сопровождения цели по направлению [4, с. 424-428; 8, с. 450]. Однако в ней в качестве суммарно-разностного преобразователя используется МИО 9, а элементы приемных трактов (смесители, фильтры, усилители промежуточной частоты) объединены в блоки элементов линейной части приемников (блоки 4, 16 и 17). Поступившие в блоки 4, 16 и 17 сигналы фильтруются (освобождаются от сигналов посторонних частот), их частота понижается в смесителях до промежуточной, после чего они усиливаются до величин, необходимых для работы последующих устройств. С выходов блоков 4 и 16 усиленные сигналы поступают соответственно на первые входы фазовых детекторов 2 и 20.
Информация о величине рассогласования цели относительно линии визирования (равносигнального направления) по угловым координатам заложена в амплитуде сигналов разностных каналов, а о направлении рассогласования - в их фазах [4, 8] . Поэтому для выделения напряжений, пропорциональных угловым рассогласованиям, применяются фазовые детекторы 2 и 20, преобразующие разностные сигналы в видеосигналы. В качестве опорного напряжения фазовых детекторов 2 и 20, подаваемого на их 2-е входы, используется выходной сигнал БЭЛЧПСК 17. С выхода фазовых детекторов 2, 20 видеосигнал, пропорциональный угловому рассогласованию цели относительно линии визирования соответственно в угломестной и в азимутальной плоскостях, поступает соответственно на вход 1-го и 2-го усилителей (усилителей мощности) 1 и 19, где происходит его увеличение до значений, достаточных для работы приводов, в состав которых могут входить электродвигатели, редукторы и т.п. Принцип работы и параметры указанных выше элементов хорошо раскрыты в [9]. Наиболее простым для понимания составом приводов является двигатель и редуктор, механически связывающий двигатель с антенной. Примерами подобного построения моноимпульсной системы сопровождения цели являются [10, с. 17, рис, 1.12,а; 11, с. 154, рис.4.23, 4.25; 12, с.447-456, рис.10.15; 13, с.406, рис.18.12; 14, с. 71, рис. 4.5, с. 77, рис. 4.8, 4.9, с.78-82, рис.4.10; 15, с.18-19, рис.1.9, с.186. рис. 6.3]. При наличии сигналов рассогласования на выходах разностных каналов МИО 9 выходные сигналы фазовых детекторов, усиленные в блоках 1 и 19, поступают соответственно на входы привода угломестного 3 и привода азимутального 15, которые механически связаны с антенной 8. Редукторы приводов воздействуют на антенну 8 таким образом, чтобы развернуть ее в направлении цели. С приводами 3 и 15 также механически связаны соответственно 1-й и 2-й потенциометрические датчики 7 и 14, выходные сигналы которых пропорциональны текущим значениям угловых координат. Выходное напряжение 1-го датчика 7 пропорционально углу места цели, а 2-го датчика 14 - азимуту цели. Напряжение с выхода блока 7 поступает на 1-й вход 4-го АЦП 24, а напряжение с выхода 2-го датчика 14 подается на 1-й вход 5-го АЦП 30. В 4-м и 5-м АЦП 24 и 30 при наличии на управляющем входе разрешающего сигнала с выхода 2-й схемы блокировки 35 аналоговая информация преобразуется в цифровую и подается соответственно на 4 и 5 входы БРПРЛИ 29. То есть блоки 24 и 30, как и блоки 23, 27, 33, являются АЦП с управлением, выполняя свои прямые функции только при наличии на управляющих входах разрешающих импульсов. Одним из вариантов АЦП с управлением является АЦП, на входе которого стоит ключ со входом управления. При этом входом АЦП с управлением будет 1-й вход ключа.
С выхода БЭЛЧПСК 17 сигнал поступает также на вход амплитудного детектора 21, который выделяет огибающую отраженного сигнала промежуточной частоты, которая в виде видеоимпульсов поступает на 1-й вход СИД 22. СИД 22 построена по классической схеме [8, с.323, рис. 7.23] и состоит из регулируемой цепи задержки (РЦЗ), генератора двух следящих полустробов, временного различителя и управляющего устройства. СИД представляет собой замкнутую систему автоматического регулирования. Сигнал с выхода амплитудного детектора 21 поступает на 1-й вход временного различителя, 2-й и 3-й входы которого связаны с соответствующими выходами генератора двух следящих полустробов, вход которого связан с выходом регулируемой цепи задержки, 1-й вход которой связан с выходом управляющего устройства, вход которого связан с выходом временного различителя. РЦЗ запускается сигналами синхронизации, роль которых выполняют импульсы схемы управления 5, поступающие на 2-й вход СИД 22. То есть 2-й вход СИД является входом РЦЗ, которая вырабатывает импульсы задержки. Длительность этих импульсов пропорциональна управляющему напряжению дальности, приходящему с выхода управляющего устройства. Задний срез импульса задержки дифференцируется и сформированный при этом сигнал запускает генератор двух следящих полустробов. Полученные в нем полустробы поступают на временной различитель, состоящий из 2-х каскадов совпадения и схемы сравнения. Полустробы поочередно открывают каскады совпадения, вследствие чего часть отряженного сигнала с выхода амплитудного детектора 21 проходит через 1-й, а часть - через 2-й каскады совпадений. На выходе временного различителя стоит схема сравнения, вырабатывающая напряжение сигнала ошибки, пропорциональное отклонению отраженного сигнала от стыка полустробов. Полярность сигнала ошибки определяется направлением отклонения.
При движении цели положение отраженного ею сигнала на выходе амплитудного детектора 21 будет изменяться, вызывая рассогласование между импульсом от цели и стыком полустробов. Это приводит к изменению сигнала ошибки, который после преобразования и усиления в управляющем устройстве изменяет напряжение на его выходе (это и есть сигнал, пропорциональный дальности до цели), которое заставляет регулируемую цепь задержки сместить полустробы в положение, при котором сигнал ошибки сбудет равен нулю. Выходом СИД 22 является выход управляющего устройства. С выхода СИД 22 сигнал, пропорциональный дальности до цели, поступает на 1-й вход 3-го АЦП 23, который при наличии на своем 2-м входе разрешающего сигнала переводит аналоговый сигнал дальности в цифровую форму и подает его для дальнейшего использования на 1-й вход БРПРЛИ 29.
После перехода РЛС на автоматическое сопровождение цели оператор РЛС может принять решение на распознавание цели. При этом он нажимает кнопку на пульте управления оператора 25, чем обеспечивает прохождение положительного напряжения на выход блока 25, поступающего в виде управляющего сигнала на 2-й (управляющий) вход 2-го ключа 26. Пульт управления оператора представляет собой блок, в котором может находиться N-е количество кнопок, тумблеров и реле, коммутирующих различные режимы работы РЛС. В данном конкретном случае пульт управления оператора содержит одну кнопку, реле и источник питания, принципиально необходимые для правильной работы РЛС с ИРСА, с помощью которых включается режим распознавания цели. После нажатия кнопки срабатывает и встает на самоблокировку реле, обеспечивающее подачу на выход пульта управления оператора 25 постоянного положительного сигнала управления для второго ключа 26.
Второй ключ 26 замыкает цепь прохождения выходного сигнала БЭЛЧПСК 17 на входы 1-го АЦП 27 и линии задержки 31. Линия задержки 31 задерживают поступающие на ее вход сигналы на время tз=1,5 с, после чего направляет их на вход 1-й схемы блокировки 32 и 1-й вход 2-го АЦП 33, работа которого заключается в том, чтобы преобразовать изменяющуюся аналоговую величину в цифровой код. АЦП 33 преобразует амплитуду отраженных целью сигналов в цифровой код в течение интервала синтезирования (накопления) с периодом дискретизации Tд= Δ t/1024, где Δ t - время синтезирования, составляющее в зависимости от условий пеленга 0,2...1 с [1].
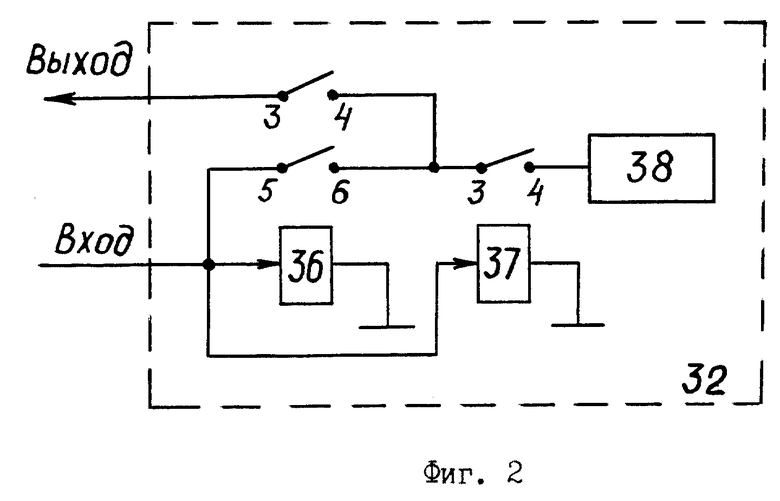
АЦП 33 работает по назначению только при подаче на его 2-й вход сигнала управления с выхода 1-й схемы блокировки 32, которая представляет собой устройство, изображенное на фиг.2. Блок 32 содержит реле 36, реле времени 37 и источник питания 38. Сигнал, отраженный целью, с выхода линии задержки 31 поступает на обмотку реле 36, чем обеспечивает замыкание его контактов 3-4 и 5-6. В это же время входной сигнал 1-й схемы блокировки 32 поступает на обмотку реле времени 37, что заставляет его замкнуть контакты 3-4 на промежуток времени, установленный в реле 37 и равный времени синтезирования Δ t. Таким образом (при дальнейшем снижении или отсутствии отраженного сигнала на входе схемы блокировки) реле времени 37 продолжает оставаться под напряжением питания источника 38 до тех пор, пока через интервал Δ t не будут разомкнуты контакты 3-4 реле 37. Выходом блока 32 является 3-й контакт реле 36, с которого в течении времени Δ t будет сниматься положительное напряжение управления АЦП. Выходной сигнал управления блока 32, равный напряжению источника питания 38, поступает одновременно на вход 2-й схемы блокировки 35 и управляющие входы 1-го и 2-го АЦП 27 и 33, разрешая преобразование аналогового сигнала в цифровой код. Поэтому преобразование в блоке 33 будет происходить в течение всего интервала синтезирования Δ t.
Сигналы с выхода АЦП 33 поступают на вход 2-го вычислителя БПФ 34. Вычислитель БПФ 34 включает накопительный каскад (буфер) и БПФ-процессор. Таким образом, в накопительном каскаде блока 34 формируется оцифрованная информация о диаграмме обратного рассеяния (ДОР) сопровождаемой цели. БПФ-процессор блока 34 начинает выполнять преобразование сигнала (выполнять операцию БПФ) только при наличии в его накопительном буфере 1024 дискретизированных данных с выхода 2-го АЦП 33. В момент прихода на вход 2-го вычислителя БПФ 34 1024-го цифрового сигнала начинается выполнение БПФ, результатом которого является массив данных из 1024 элементов, описывающих в цифровом виде низкочастотный (0-100 Гц) доплеровский портрет (ДП) цели, характеризующий пространственное распределение локальных рассеивающих центров (РЦ) поверхности цели в поперечном (азимутальном) направлении [16]. В этот же момент времени на выходе 1-го вычислителя БПФ 28 будет сформирован ДП сопровождаемой воздушной цели для более позднего набора дискретизированных и оцифрованных отраженных сигналов, так как работа 1-го АЦП 27 и 1-го вычислителя БПФ 28 (через которые последовательно проходит отраженный сигнал с выхода 2-го ключа 26) аналогична работе 2-го АЦП 33 и 2-го вычислителя БПФ 34. Исходя из схемы (фиг. 1), содержащей линию задержки 31, ясно, что по времени ДП блока 34 является первым, а ДП блока 34 - вторым.
Известно, что ДП цели характеризует распределение РЦ в поперечном относительно линии визирования направлении, соответствующее моменту середины интервала синтезирования, то есть середине обрабатываемой выборки ДОР сопровождаемой цели. Выполнение БПФ с данными определенного интервала ДОР и составляет сущность ИРСА.
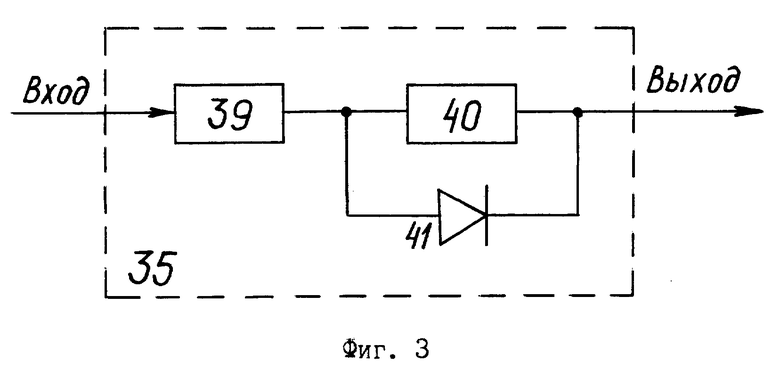
Данные о 1-м ДП (с выхода 2-го вычислителя БПФ 34) и о 2-м ДП (с выхода 1-го вычислителя БПФ 28) в виде массивов чисел поступают соответственно на 3-й и 2-й входы БРПРЛИ 29, куда с 3-го, 4-го и 5-го АЦП поступают данные о дальности, угле места и азимуте цели. Для обеспечения этого сигнал с выхода блока 32 подается на вход 2-й схемы блокировки, вырабатывающей два положительных импульса длительностью Tи, разнесенных на Δ t, чтобы пропустить на 1-й, 4-й и 5-й входы блока 29 только по одному одновременному отсчету соответствующей координаты в начале и конце повторного интервала синтезирования. Вторая схема блокировки 35 представляет собой устройство, показанное на фиг. 3. В его состав входят формирователь укороченных импульсов с ТТЛ-элементами 39 [17, с. 256, рис.5.13], линия задержки 40 и диод 41. Вход блока 39 является входом 2-й схемы блокировки 39. Выход формирователя укороченных импульсов 39 соединен одновременно со входом линии задержки 40 и входом диода 41. Выход линии задержки 40, соединенный с выходом диода 41, служит выходом всего блока 35. Формирователь укороченных импульсов по сигналу большой длительности с выхода 1-й схемы блокировки 32 формирует на своем выходе короткий положительный импульс, длительность которого должна быть равна периоду повторения Tи. Время задержки линии задержки 40 должно быть равным времени синтезирования Δ t. При таких параметрах схемы на выход блока 35 поступят два коротких положительных импульса длительностью Tи с интервалом Δ t, которые не могут вновь пройти на вход линии задержки 40 через запертый диод 41. Эти импульсы поступают на управляющие входы 3-го, 4-го и 5-го АЦП 22, 24, 30, обеспечивая преобразование угловых координат и дальности цели в цифровую форму только в моменты начала и конца интервала повторного синтезирования. В дальнейшем эти цифровые сигналы с выходов 3-го, 4-го и 5-го АЦП 23, 24, 30 участвуют в работе блока 29, на 1-й, 4-й и 5-й входы которого они соответственно и поступают.
Блок расчета параметров РЛИ 29 представляет собой электронно-вычислительную машину, то есть вычислительный комплекс, пример реализации и применения которого приведен в [18, с. 255, рис.7.1, с. 287-290, рис. 7.10, с. 291, рис. 7.11; 19; 20, с.77, рис.3.20, с. 79, рис. 3.21, с. 133, рис. 4.22; 21, с. 66. рис. 7; 22, с. 108, рис. 2], Оперируя цифровыми данными об изменении координат цели в процессе сопровождения, а также об изменении структуры ДП цели с течением времени, БРПРЛИ 20 рассчитывает координаты РЦ поверхности цели в двухмерной системе координат "азимут-дальность" [1]. Расчет координат РЦ в двухмерной системе производится на основе знания пространственного ракурса сопровождения цели γ, угловой скорости его изменения  угла синтезирования Δγ (изменения ракурса локации цели за интервал когерентного накопления Δ t) и значений доплеровских частот i-x РЦ относительно доплеровской частоты центра сопровождения цели (ЦСД) в два момента времени
угла синтезирования Δγ (изменения ракурса локации цели за интервал когерентного накопления Δ t) и значений доплеровских частот i-x РЦ относительно доплеровской частоты центра сопровождения цели (ЦСД) в два момента времени  и
и  соответствующих серединам двух равных интервалов синтезирования, используемых для получения 1-го и 2-го ДП цели.
соответствующих серединам двух равных интервалов синтезирования, используемых для получения 1-го и 2-го ДП цели.
Блок 29 запоминает угловые координаты и дальность, соответствующие временам начала и конца синтезирования при получении 2-го ДП и поступающие соответственно на 4-й, 5-й и 1-й входы блока 29. Пусть εн - угол места цели в момент начала повторного синтезирования; βн и rн - азимут и наклонная дальность до цели в этот же момент времени; εк - угол места цели, соответствующий концу повторного синтезирования; βк и rк - азимут и наклонная дальность в этот же момент времени. Угловые координаты и дальность до цели в моменты начала и конца синтезирования пересчитываются по известным формулам в прямоугольные координаты соответственно xн, yн, zн и xк, yк, zк. На основе этих данных БРПРЛИ 29 определяет абсолютную скорость цели по формуле
Угловая скорость поворота цели (изменения ракурса) определяется по формуле
Угол синтезирования может быть найден по формуле  а значения доплеровских частот, i-х РД Fдi
а значения доплеровских частот, i-х РД Fдi и Fдi
и Fдi в соответствующие моменты времени
в соответствующие моменты времени  и
и  определяются на основе цифрового анализа 1-го и 2-то ДП цели, поступающих соответственно на 3-й и 2-й входы БРПРЛИ 29. При этом доплеровской частотой i-го РЦ считается частота точки максимума спектральной составляющей i-го РЦ. При цифровом анализе ДП определяется также амплитуда i-х гармоник ДП для вычисления с учетом некоторого коэффициента пропорциональности, отражательной способности (эффективной площади рассеяния) i-го РЦ.
определяются на основе цифрового анализа 1-го и 2-то ДП цели, поступающих соответственно на 3-й и 2-й входы БРПРЛИ 29. При этом доплеровской частотой i-го РЦ считается частота точки максимума спектральной составляющей i-го РЦ. При цифровом анализе ДП определяется также амплитуда i-х гармоник ДП для вычисления с учетом некоторого коэффициента пропорциональности, отражательной способности (эффективной площади рассеяния) i-го РЦ.
Затем БРПРЛИ 29 вычисляет изменения доплеровских частот, отраженных i-ми РЦ сигналов относительно доплеровской частоты ЦСЦ за интервал tз, и определяет квадранты картинной плоскости с началом в ЦСЦ, которая в пространстве будет представлять собой плоскость, перпендикулярную оси вращения цели и проходящую через вектор линейной скорости и линию визирования цели. Отнесение РЦ в различные квадранты производится по следующему правилу [1]:
1 квадрант - частота гармоники положительна, т.е. больше частоты ЦСЦ и растет по абсолютному значению;
2 квадрант - частота гармоники отрицательна, т.е. меньше частоты ЦСЦ и уменьшается по абсолютному значению;
3 квадрант - частота гармоники отрицательна и увеличивается по абсолютному значению;
4 квадрант - частота гармоники положительна и уменьшается по абсолютному значению.
После этого блок 29 рассчитывает значения расстояний ρi от ЦСЦ до i-го РЦ и угла ξi между линейной скоростью его вращения вокруг ЦСЦ Vi и ее радиальной составляющей Vri по формулам [1]
где λ - длина волны зондирующего узкополосного сигнала.
Цифровые данные об i-x РЦ (ρi, ξi) поступают на выход блока 29 и далее - одновременно в блок отображения РЛИ 18 и блок РЛР 6. Поскольку у каждой цели в соответствии с ее геометрическими особенностями количество РЦ и их координаты ρi, ξi/ будут различными, то можно считать, что на выходе БРПРЛИ 29 формируется сигнал, детально характеризующий распознаваемую цель. В блоке отображения РЛИ 18 на экране монитора (дисплея) в системе координат "азимут-дальность" формируется двухмерное РЛИ сопровождаемой цели в виде точек, вокруг которых наносятся окружности с радиусами, пропорциональными отражательным способностям соответствующих РЦ, а в нижней строке выводится информация о суммарной (полной) эффективной площади рассеяния цели, а также о ее угловых координатах и дальности, как показано в [16, рис. 1]. Нанесение РЛИ i-x РЦ на картинную плоскость производится по следующему правилу: при отнесении i-го РЦ в соответствующий квадрант в данном квадранте определяется точка, лежащая на дуге окружности радиуса ρi, касательная в которой к этой дуге составляет с радиальным направлением для 1-го и 4-го квадрантов и с ему противоположным для 2-го и 3-го квадрантов угол ξi [1].
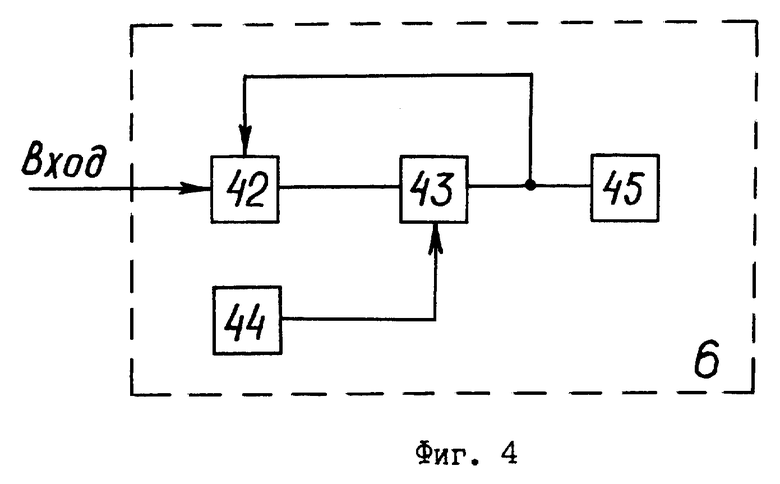
По координатам i-х РЦ в РЛИ блок РЛР 6 по правилу сравнения [23] производит распознавание сопровождаемой цели, то есть отнесение ее к одному из определенных классов в соответствии с заранее установленным алфавитом. Елок РЛР 6 включает в себя запоминающее устройство 42, устройство сравнения 43, блок хранения эталонов 44, табло вывода результатов 45 (фиг.4). Выходной сигнал блока 29, в котором заключена информация о координатах i-x РЦ в РЛИ, поступает в запоминающее устройство 42, которою подает входной сигнал на 1-й вход устройства сравнения 43 в течение промежутка времени, необходимого для сравнения входного сигнала с набором эталонных сигналов, поступающих поочередно на 2-й вход устройства сравнения с выхода блока хранения эталонов 44. При совпадении сигнала запоминающего устройства 42 с одним из эталонных сигналов на выходе устройства сравнения 43 формируется сигнал, уровень которого пропорционален номеру поступившего очередного эталона. Этот сигнал обнуляет выход запоминающего устройства 42 до начала следующего цикла распознавания, а также поступает на табло вывода результатов 45, в котором в соответствии с уровнем поступающего на него сигнала загорается индикатор (лампа) распознанного класса воздушной цели. Количество эталонных сигналов, поступающих поочередно на 2-й вход устройства сравнения определяется числом классов в алфавите распознавания. Если число классов в алфавите мало, то блок хранения эталонов 44 целесообразно заменить на блок хранения порогов, с которыми будет сравниваться в блоке 42 сумма расстояний между РЦ в двухмерном РЛИ, заблаговременно вычисленная в БРПРЛИ 29 и поданная на вход запоминающего устройства 42. Можно предложить и другие варианты распознавания цели (например, по правилу обобщенного голосования [23]), что не является принципиальным для работы РЛС с ИРСА, но составляет один из аспектов ее работы.
Проверка качества распознавания целей трех классов (крупноразмерные, среднеразмерные, малоразмерные) по указанному правилу методом математического моделирования, описанного в [16], показала, что средняя ошибка РЛР не превышает 8% [24]. При этом использовались вышеперечисленные признаки двумерного РЛИ и полная эффективная площадь рассеяния цели, а априорная информация отсутствовала. Примечательно то, что, во-первых, согласно [1] цикл распознавания цели на основе признаков двумерного РЛИ не превышает 3,5 с, а во-вторых, указанные признаки в виду их высокой информативности могут использоваться в более сложных системах автоматического (без вмешательства оператора РЛС) РЛР в совокупности с траекторными, тактическими и другими признаками [23], что является явным преимуществом по сравнению с оптическими РЛИ.
Используемая литература
1. Патент РФ N 2066059. Способ построения двухмерного радиолокационного изображения в РЛС сопровождения прямолинейно движущейся цели. Заявка N 93057639. Приоритет 27.12.1993 г.
2. Астанин Л. Ю., Просыпкин С. Е., Степанов А. В. Аппаратура и средства для широкополосных измерений радиолокационных характеристик // Зарубежная радиоэлектроника. 1991. N 1. С. 117. (аналог).
3. Пасмуров А. Я. Получение радиолокационных изображений летательных аппаратов // Зарубежная радиоэлектроника, 1987. N 12. C.26-28. (прототип).
4. Финкельштейн М. И. Основы радиолокации. М.: Радио и связь. 1983. - 536 с.
5. Крохин В.В. Информационно-управляющие космические радиолинии. Москва. 1993. Часть 2.
6. Радиолокационные станции воздушной разведки. /Под ред. Г. С. Кондратенкова. М.: Воениздат. 1983. 152 с.
7. Теоретические основы радиолокации. Под ред. В.Е. Дулевича. М.: Сов. радио. 1978, 608 с.
8. Теоретические основы радиолокации/ Под ред. В.Е.Дулевича. М.: Сов. радио. 1964. 732 с. (рис. 7.23, с. 323)
9. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение. 1978. 736 с.
10. Коновалов Г. Ф. Радиоавтоматика. Учеб. для вузов по спец. "Радио техника" М.: Высшая школа. 1990. 335 с.
11. Артемьев В.М., Яшугин Е.А. Основы автоматического управления систем радиоэлектронных средств. Учебник. Воениздат. 1984. 456 с.
12. Справочник по основам радиолокационной техники./ Под ред. В.В. Дружинина. М.: Воениздат. 1967. 768 с.
13. Радиотехнические системы. Учеб. для вузов по спец. "Радиотехника" Под ред. Ю.М.Казаринова. М.: Высшая школа. 1990. 496 с.
14. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Радио и связь. 1984. 312 с.
15. Моделирование в радиолокации / Под ред. А.И. Леонова. М.: Сов. радио. 1979. 264 с.
16. Митрофанов Д. Г. Синтез радиолокационного изображения цели методом математического моделирования ее доплеровских портретов // Радиоэлектроника. 1994. N 4. с.72-75 (Известия высших учебных заведений).
17. Ерофеев Ю.Н. Импульсные устройства. Учеб. пособие для вузов по специальности "Радиотехника". М.: Высшая школа. 1989. 527 с.
18. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: Радио и связь. 1986.
19. Фуллер С.X., Устерхут Дж.К. и др. Мультимикропроцессорные системы. Обзор и пример практической реализации // ТИИЭР. 1978. Т. 66. N 2. c.135-151.
20. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь. 1984. 152 с.
21. Сарычев В.А, Грошев С.А., Семенов А.А. Методы получения некоординатной информации о целях бортовыми РЛС// Зарубежная радиоэлектроника. N 1, 1991. с.66, рис.7.
22. Панько С.П. Сверхширокополосная радиолокация// Зарубежная радиоэлектроника. N 1. 1991. с. 108, рис. 2.
23. Селекция и распознавание на основе локационной информации. А.Л. Горелик, Ю. Л. Барабаш, О.В. Кривошеев, С.С. Эпштейн; Под ред. А.Л. Горелика. М.: Радио и связь. 1990. 240 с.
24. Митрофанов Д. Г. , Ермоленко В.П. Распознавание воздушных целей за счет измерения их пространственной протяженности //Зарубежная радиоэлектроника. N 1. 1996. с. 53-56.
Радиолокационная станция с инверсным синтезированием апертуры способна на основе узкополосного когерентного зондирования распознавать воздушные цели по сформированным двумерным радиолокационным изображениями (РЛИ). Изобретение относится к радиолокационным устройстам и предназначено для аппаратурной реализации известного способа получения двумерных РЛИ сопровождаемых воздушных целей с прямолинейной траекторией полета. Цель изобретения - получение двумерных РЛИ сопровождаемых воздушных целей с помощью РЛС с инверсным синтезированием апертуры, использующих узкополосные зондирующие сигналы и обеспечивающих своевременное достоверное распознавание классов воздушных целей. Для этого в состав известной РЛС, содержащей задающий генератор, ключ, когерентный передатчик, антенный переключатель, антенну, аналого-цифровой преобразователь (АЦП), систему управления антенной, два вычислителя быстрого преобразования Фурье и блок отображения РЛИ, дополнительно вводят второй ключ, схему управления, первый и второй фазовые детекторы, амплитудный детектор, четыре АЦП, линию задержки, блок расчета параметров РЛИ, блок радиолокационного распознавания (РЛР), систему измерения дальности, блок элементов линейной части приемника суммарного канала, блок элементов линейной части приемника разностного угломестного канала, блок элементов линейной части приемника разностного азимутального канала, два потенциометрических датчика, пульт управления оператора, моноимпульсный облучатель, первую и вторую схемы блокировки. Предложенное построение структурной схемы РЛС с инверсным синтезированием апертуры позволяет достичь возможности использования признаков двумерного РЛИ в автоматических системах РЛР в совокупности с другими признаками: сокращения времени построения РЛИ до единиц секунд, получения РЛИ целей в рамках узкополосного зондирования, что и является достигаемым техническим результатом. 4 ил.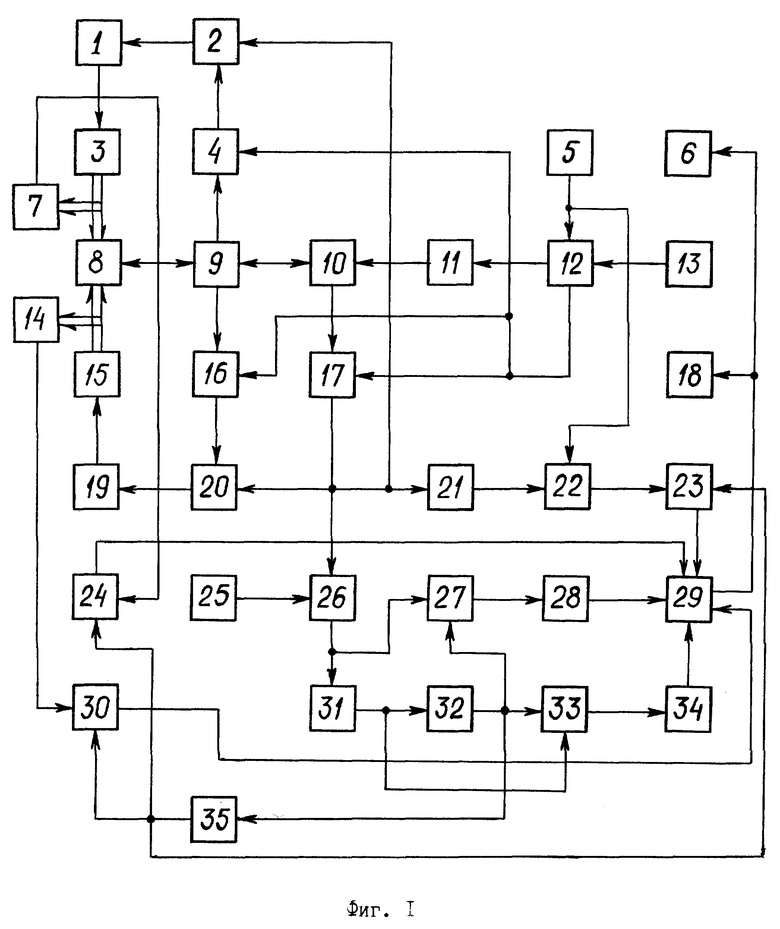
Радиолокационная станция с инверсным синтезированием апертуры, содержащая антенну, блок отображения радиолокационного изображения, два вычислителя быстрого преобразования Фурье, первый аналого-цифровой преобразователь, выход которого подключен к входу первого вычислителя быстрого преобразования Фурье, систему управления антенной, имеющую в своем составе два усилителя, угломестный и азимутальный приводы, причем выход первого усилителя соединен с входом угломестного привода, а выход второго усилителя - с входом азимутального привода, а также содержащая последовательно соединенные задающий генератор, первый ключ, когерентный передатчик и антенный переключатель, отличающаяся тем, что дополнительно введены моноимпульсный облучатель, соединенный с его первым выходом своим первым входом блок элементов линейной части приемника разностного угломестного канала, соединенный с его выходом своим первым входом первый фазовый детектор, подключенный к второму выходу моноимпульсного облучателя своим первым входом блок элементов линейной части приемника разностного азимутального канала, соединенный с его выходом своим первым входом второй фазовый детектор, два потенциометрических датчика, схема управления, блок радиолокационного распознавания, последовательно соединенные второй ключ, линия задержки, второй аналого-цифровой преобразователь, последовательно подключенные блок элементов линейной части приемника суммарного канала, амплитудный детектор, система измерения дальности, третий аналого-цифровой преобразователь, блок расчета параметров радиолокационного изображения, соединенные с его четвертым и пятым входами своими выходами соответственно четвертый и пятый аналого-цифровые преобразователи, пульт управления оператора и две схемы блокировки, причем второй выход первого ключа соединен с вторым входом блока элементов линейной части приемника разностного угломестного канала, вторым входом блока элементов линейной части приемника разностного азимутального канала, вторым входом блока элементов линейной части приемника суммарного канала, выход которого соединен также с вторыми входами первого и второго фазовых детекторов и первым входом второго ключа, второй вход которого подключен к выходу пульта управления оператора, а выход - к первому входу первого аналого-цифрового преобразователя, второй вход которого соединен с выходом первой схемы блокировки, вторым входом второго аналого-цифрового преобразователя и входом второй схемы блокировки, выход которой подключен к второму входу третьего аналого-цифрового преобразователя, второму входу пятого аналого-цифрового преобразователя и второму входу четвертого аналого-цифрового преобразователя, первый вход которого соединен с выходом первого потенциометрического датчика, вход которого механически связан с выходом угломестного привода и первым механическим входом антенны, второй механический вход которой механически связан с выходом привода азимутального и входом второго потенциометрического датчика, выход которого подключен к первому входу пятого аналого-цифрового преобразователя, выход первого фазового детектора соединен с входом первого усилителя, выход второго фазового детектора соединен с входом второго усилителя, вход-выход антенны подключен к второму входу-выходу моноимпульсного облучателя, первый вход-выход которого соединен с входом-выходом антенного переключателя, выход которого соединен с первым входом блока элементов линейной части приемника суммарного канала, выход схемы управления подключен к второму входу первого ключа и второму входу системы измерения дальности, выход второго аналого-цифрового преобразователя соединен с входом второго вычислителя быстрого преобразования Фурье, выход которого подключен к третьему входу блока расчета параметров радиолокационного изображения, второй вход которого соединен с выходом первого вычислителя быстрого преобразования Фурье, а выход - с входом блока радиолокационного распознавания и входом блока отображения радиолокационного изображения, при этом выход линии задержки подключен также к входу первой схемы блокировки.
| Пасмуров А.Я | |||
| Получение радиолокационных изображений летательных аппаратов | |||
| - Зарубежная радиоэлектроника, 1987, N 12, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| US 4244036 A, 06.01.81. | |||
