Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов.
Известно захватное устройство [1], в котором захват и удерживание груза производится за счет его механического контакта с зажимным механизмом. Захватное устройство содержит корпус с закрепленными на нем двумя вертикальными стойками, между которыми на шарнирных рычагах размещены губки. При размещении детали между зажимными губками шарнирные рычаги расположены под углом относительно вертикальной боковой поверхности детали. Недостатком данного технического решения является недостаточно надежная фиксация объекта перемещения в захватном устройстве.
Целью изобретения является повышение надежности фиксации объекта перемещения в захватном устройстве.
Цель достигается тем, что захватное устройство манипулятора работа снабжено двумя термоэлектрическими батареями (ТЭБ), каждая из которых одной из своих поверхностей контактирует с поверхностью зажимной губки. ТЭБ состоит из последовательно соединенных в электрическую цепь постоянного тока посредством коммутационных пластин чередующихся ветвей, изготовленных соответственно из полупроводников р- и n-типа, при этом электрическое соединение ветвей осуществлено посредством контакта ветвь р-типа - коммутационная пластина - ветвь n-типа, в которой каждая ветвь р-типа контактирует торцевой поверхностью с одной из поверхностей коммутационной пластины, а ветвь n-типа - с другой ее поверхностью. Концы коммутационных пластин выполнены выступающими за поверхности структуры, образованной ветвями ТЭБ, при этом концы коммутационных пластин, осуществляющих холодные контакты, выполнены выступающими за одну поверхность упомянутой структуры, а концы коммутационных пластин, осуществляющих горячие контакты, выполнены выступающими за другую поверхность упомянутой структуры. Причем упомянутые концы коммутационных пластин выполнены с сечением Т-образной формы и припаяны к электроизолированным друг от друга площадкам, выполненным в виде пленок металлов или сплавов, нанесенных на керамические пластины, и снабжены двумя дополнительными губками, пропитанными жидкостью с фазовым переходом первого рода и нанесенными на поверхность каждой из ТЭБ с противоположной от зажимной губки стороны.
Конструкция захватного устройства манипулятора робота приведена на фиг.1. Захватное устройство содержит манипулятор 1, снабженный зажимным механизмом 2 с зажимными губками 3. Зажимные губки 3 своей поверхностью, обращенной к объекту захвата, приведены в надежный механический и хороший тепловой контакт с одной из поверхностей соответствующей термоэлектрической батареи (ТЭБ) 4, на другой противоположной поверхности которой имеются дополнительные губки 5, пропитанные жидкостью с фазовым переходом первого рода.
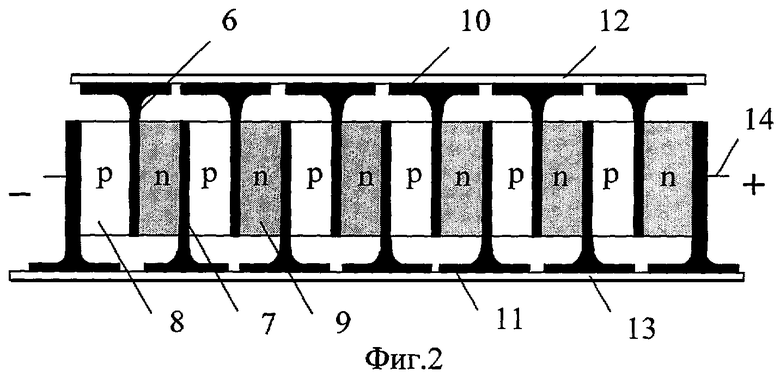
Каждая из ТЭБ 4 (фиг.2) состоит из последовательно соединенных в цепь посредством коммутационных пластин 6 и 7 чередующихся ветвей, изготовленных соответственно из полупроводников р-типа и n-типа. Электрическое соединение ветвей осуществляется посредством контакта ветвь р-типа 8 - коммутационная пластина 6 и 7 - ветвь n-типа 9, где ветвь р-типа 8 контактирует торцевой поверхностью с одной из поверхностей коммутационной пластины, а ветвь n-типа 9 - с другой. Коммутационные пластины 6 и 7 выступают за поверхности структуры, образованной ветвями ТЭБ 4. Концы коммутационных пластин, осуществляющих холодные контакты (например, 6), выступают за одну поверхность структуры, а концы коммутационных пластин, осуществляющих горячие контакты (например, 7), за другую. Свободные концы коммутационных пластин 6 и 7 выполнены с сечением Т-образной формы и припаяны к электроизолированным друг от друга площадками 10 и 11, выполненным в виде пленок металлов или сплавов, нанесенных на керамические пластины 12 и 13. На крайней торцевой поверхности ветвей, находящихся соответственно в начале и конце ТЭБ 4, имеются контактные площадки 14, посредством которых к ней осуществляется подвод электрической энергии.
Устройство работает следующим образом.
Посредством манипулятора 1 устройство устанавливается над перемещаемым объектом и затем опускается. В результате этого груз, подлежащий перемещению, оказывается между зажимными губками 3 зажимного механизма 2. Далее зажимный механизм 2 осуществляет обхват объекта и его плотный механический контакт с дополнительными губками 5, имеющими контакт с ТЭБ 4.
Далее осуществляется подача на ТЭБ 4 постоянного электрического тока через контактные площадки 14. При этом между коммутационными пластинами 6 и 7, представляющими собой контакты ветвей р- и n-типа 8 и 9, возникает разность температур, обусловленная выделением на одних соседних концах ветви и поглощением на других соседних концах ветви теплоты Пельтье. При указанной на фиг.2 полярности электрического тока происходит нагрев коммутационных пластин 7 и охлаждение коммутационных пластин 6. Соответственно имеет место нагрев площадок 10 и керамической пластины 12 и охлаждение площадок 11, керамической пластины 13, пластичного губчатого вещества 5. Надежный захват объекта осуществляется его примораживанием к холодным поверхностям ТЭБ 4. Дополнительные губки 5, пропитанные жидкостью с фазовым переходом первого рода, служат для увеличения площади соприкосновения холодной поверхности ТЭБ 4 и объекта захвата.
Далее происходит перемещение манипулятора 1 в необходимое место и установка объекта на необходимую рабочую позицию. После этого производится изменение полярности ТЭБ 4, прогрев дополнительных губок 5 и соответственно съем объекта захвата с манипулятора 1.
ЛИТЕРАТУРА
1. Патент РФ №2022777. Захватное устройство. Булгаков А.Г., Дровников А.Н., Загороднюк В.Т., Фабриков А.И.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ДЕТАЛЕЙ МЕТОДОМ ПРИМОРАЖИВАНИЯ | 2004 |
|
RU2282280C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ДЕТАЛЕЙ МЕТОДОМ ПРИМОРАЖИВАНИЯ | 2004 |
|
RU2282279C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2003 |
|
RU2269183C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2004 |
|
RU2282277C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ДЕТАЛЕЙ МЕТОДОМ ПРИМОРАЖИВАНИЯ | 2005 |
|
RU2312427C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2004 |
|
RU2289869C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2004 |
|
RU2280919C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2003 |
|
RU2269184C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2004 |
|
RU2282278C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2006 |
|
RU2396636C2 |
Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов. Захватное устройство манипулятора робота содержит зажимной механизм с зажимными губками и снабжено двумя термоэлектрическими батареями (ТЭБ). Каждая из ТЭБ одной из своих поверхностей контактирует с поверхностью зажимной губки и состоит из последовательно чередующихся ветвей. Ветви изготовленны из полупроводников р- и n-типа, при этом электрическое соединение ветвей осуществлено посредством контакта ветвь р-типа - коммутационная пластина - ветвь n-типа. Концы коммутационных пластин выполнены с сечением Т-образной формы и припаяны к электроизолированным друг от друга площадкам. Площадки выполненны в виде пленок металлов или сплавов, нанесенных на керамические пластины. Техническим результатом изобретения является повышение надежности фиксации объекта перемещения в захватном устройстве. 2 ил.
Захватное устройство манипулятора робота, содержащее зажимной механизм с зажимными губками, отличающееся тем, что оно снабжено двумя термоэлектрическими батареями (ТЭБ), каждая из которых одной из своих поверхностей контактирует с поверхностью зажимной губки и состоит из последовательно соединенных в электрическую цепь постоянного тока посредством коммутационных пластин чередующихся ветвей, изготовленных, соответственно из полупроводников р- и n-типа, при этом электрическое соединение ветвей осуществлено посредством контакта ветвь р-типа - коммутационная пластина - ветвь n-типа, в которой каждая ветвь р-типа контактирует торцевой поверхностью с одной из поверхностей коммутационной пластины, а ветвь n-типа - с другой ее поверхностью, концы коммутационных пластин выполнены выступающими за поверхности структуры, образованной ветвями ТЭБ, при этом концы коммутационных пластин, осуществляющих холодные контакты, выполнены выступающими за одну поверхность упомянутой структуры, а концы коммутационных пластин, осуществляющих горячие контакты, выполнены выступающими за другую поверхность упомянутой структуры, причем упомянутые концы коммутационных пластин выполнены с сечением Т-образной формы и припаяны к электроизолированным друг от друга площадкам, выполненным в виде пленок металлов или сплавов, нанесенных на керамические пластины, и двумя дополнительными губками, пропитанными жидкостью с фазовым переходом первого рода и нанесенными на поверхность каждой из ТЭБ с противоположной от зажимной губки стороны.
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Губка для захвата хрупких деталей | 1990 |
|
SU1812101A1 |
| Схват манипулятора | 1984 |
|
SU1201128A1 |

