Изобретение относится к робототехнике и предназначено для использования в констpукциях промышленных роботов и манипуляторов. Известно грузозахватное устройство с механизмом заклинивания тела за счет усилия от веса захватываемого груза. Устройство содержит корпус, шарнирно-параллельные механизмы с двумя зажимными губками, смонтированного на двух параллельных стойках корпуса.
Недостатком данного технического решения является сложность и нерациональность исполнения конструкции, что снижает надежность устройства в эксплуатации.
Целью изобретения является повышение надежности и упрощение конструкции.
Это достигается тем, что устройство, содержащее корпус в виде двух параллельных стоек, смонтированные на стойках посредством шарнирно-параллелограммных механизмов зажимные губки со скошенными нижними концами со стороны подачи детали и с рифленными рабочими поверхностями и с приводом подъема одной из губок, снабжено рифленными поверхностями губок, выполненными из резины и имеют горизонтальные поперечные выступы, каждый из которых выполнен в виде двух скошенных вверх ребер треугольного сечения, при этом один из верхних шарнирных рычагов зажимной губки выполнен с консольным упором, а привод подъема выполнен в виде силового цилиндра, шток которого имеет возможность взаимодействия с вышеупомянутым упором.
На фиг.1 показано устройство с удерживаемой захватом деталью; на фиг.2 - то же, с освобожденной от захвата деталью.
Захватное устройство содержит корпус 1, подвешенный на механической руке 2. Снизу к корпусу присоединена жестко вертикальная правая стойка 3, на которой закреплен пневмоцилиндр 4 со штоком 5. Левая вертикальная стойка 6 смонтирована на корпусе с возможностью перемещения в пазу 7 с последующим закреплением в заданном положении зажимом 8. Зажимные губки 9 через шарнирно-параллелограммный механизм, состоящий из рычагов 10, шарнирно присоединены к вертикальным стойкам 3 и 6. К верхнему шарнирному рычагу 9 присоединен консольный упор 11 для контактирования со штоком 5. Зажимные губки 9 на контактирующих вертикальных поверхностях оснащены прокладками 12 с поперечными горизонтальными выступами, каждый из которых выполнен в виде двух скошенных вверх ребер 13 треугольного сечения. Между зажимными губками расположена перемещаемая деталь 14, а нижние концы 15 разведены относительно один другого.
Работа захватного устройства осуществляется следующим образом.
Посредством механической руки (фиг.1) корпус 1 с зажимными губками 9 устанавливается над деталью 14 и опускается на нее. При этом шарнирная подвеска зажимных губок 9 не создает препятствия для размещения транспортируемой детали 14 между зажимных губок, а раздвоенные в стороны нижние концы 15 зажимных губок освобождают от необходимости проведения прицельных операций. Поскольку расстояния между вертикальными стойками 3 и 6 отрегулированы так, что при размещении детали 14 между зажимными губками шарнирные рычаги 10 устанавливаются с наклоном вверх в сторону направления транспортирования детали 14, то создаются надежные условия, когда при поднятии корпуса 2 вместе с ним будет поднята и деталь 14. При увеличении веса детали 14 она с еще большей силой зажимается между губками 9. Рифленные рабочие поверхности зажимных губок обеспечивают высокий коэффициент трения между контролирующей поверхностью зажимных губок и боковой поверхностью детали 14.
После получения сигнала с задающего устройства на разжатие губок шток 5 пневмоцилиндра 4 выдвигается вниз и надавливает на консольный упор 11 (фиг. 2). В результате зажимные губки 9 установленная шарнирно на правой стойке 3 поднимается, вследствие чего между губками и деталью образуется зазор, что освобождает деталь от удержания ее зажимными губками.
Преимущество изобретения состоит в том, что в нем простыми средствами достигается надежный захват и удержание перемещаемого груза с тем большим усилием, чем тяжелее захватываемый груз.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захватное устройство | 1984 |
|
SU1255425A1 |
| Адаптивное захватное устройство | 1986 |
|
SU1454689A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Захватное устройство | 1988 |
|
SU1632776A1 |

Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов. Захватное устройство содержит корпус 1 с закрепленными на нем двумя вертикальными стойками 3 и 6, между которыми на шарнирных рычагах 10 размещены зажимные губки 9. При размещении детали 14 между зажимными губками 9 шарнирные рычаги 10 расположены под углом относительно вертикальной боковой поверхности детали 14. Поэтому при поднятии корпуса 1 возникают силы, удерживающие деталь между зажимными губками. 2 ил.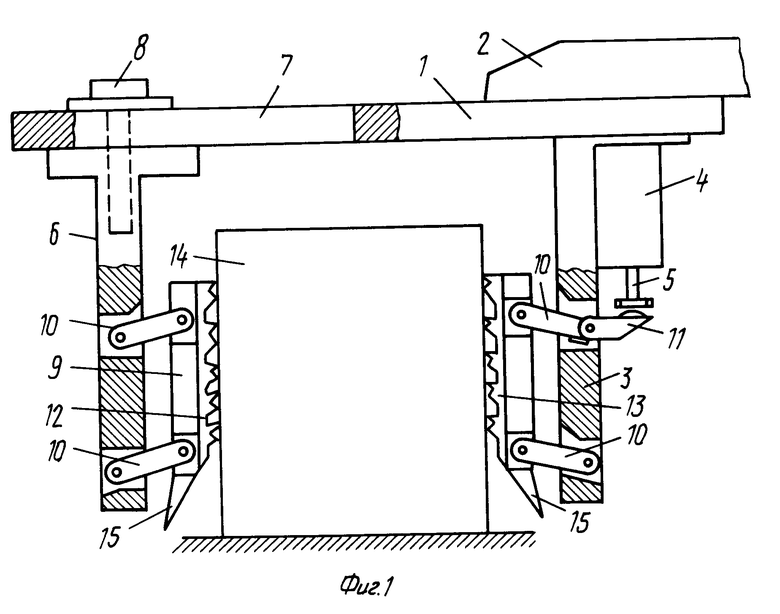
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус в виде двух параллельных стоек, смонтированные на стойках посредством шарнирно-параллелограммных механизмов зажимные губки со скошенными нижними концами со стороны подачи детали и с рифлеными рабочими поверхностями, привод подъема одной из губок, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, рифленые рабочие поверхности зажимных губок выполнены из резины и имеют горизонтальные поперечные выступы , каждый из которых выполнен в виде двух скошенных вверх ребер треугольнго сечения, при этом один из верхних шарнирных рычагов зажимной губки выполнен с консольным упором, а привод подъема выполнен в виде силового цилиндра, шток которого имеет возможность взаимодействия с упомянутым упором.
| Грузозахватное устройство для транспортирования изделий, снабженного монтажными штырями | 1973 |
|
SU466165A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
