Изобретение относится к системам активной безопасности автомобиля, а именно к системам коррекции траектории движения автомобиля при боковом ветровом возмущении с целью поддержания заданного направления движения.
Существует система, корректирующая траекторию движения автомобиля дополнительным поворотом задней оси автомобиля при действии случайных боковых ветровых возмущений (патент US № 5315868, 31.05.1994) и принятая за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при применении известной системы, корректирующей траекторию движения автомобиля, принятой за прототип, относятся усложнение конструкции автомобиля за счет привода управления задней осью автомобиля (что невозможно применить на всех типах автомобилей) и использования датчика продольной скорости движения автомобиля.
Технический результат - уменьшение времени и повышение точности коррекции заданной траектории движения автомобиля при воздействии случайных боковых аэродинамических возмущений, а также упрощение устройства.
Особенность заключается в том, что предлагаемое устройство управления автомобиля основывается на непосредственном измерении боковой аэродинамической силы и частотном способе прогнозирования траектории движения автомобиля, в котором используется математическая модель автомобиля, учитывающая его динамические характеристики в боковом движении и продольную скорость движения.
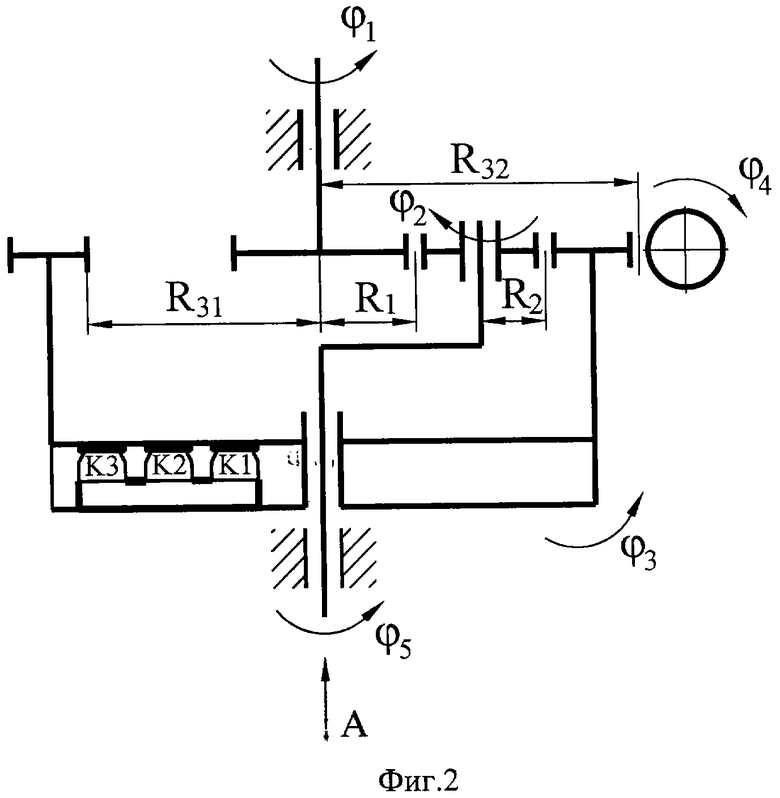
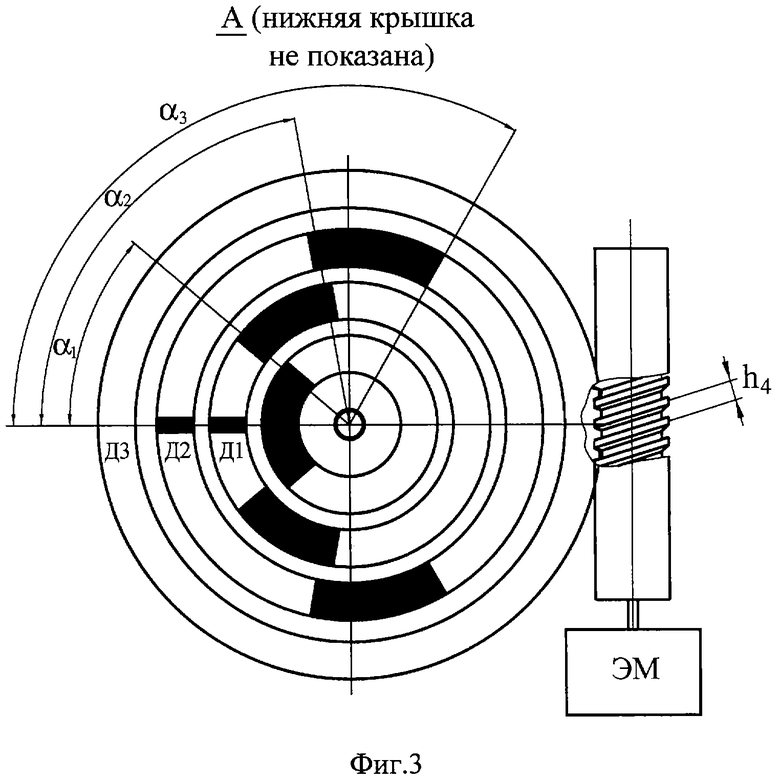
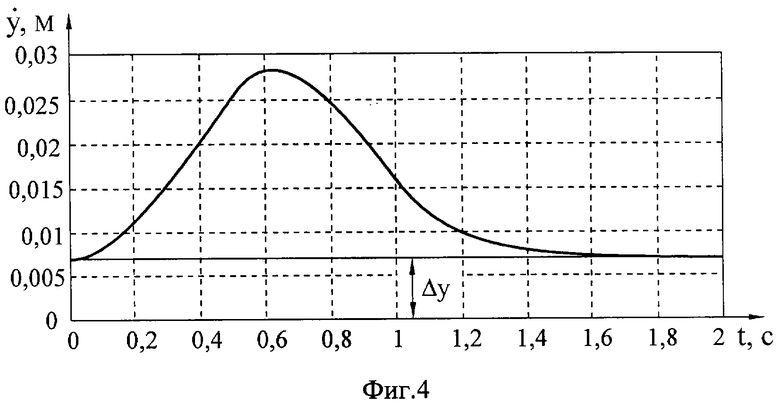
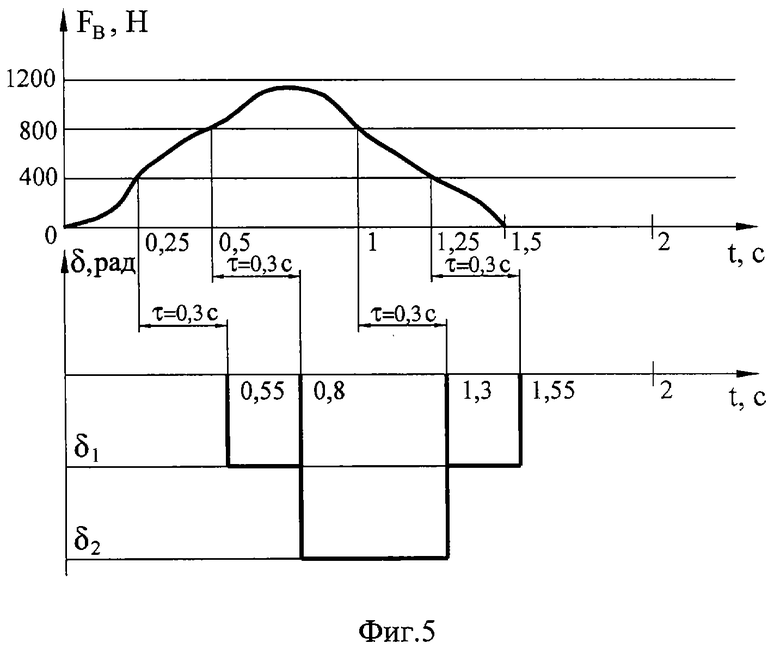
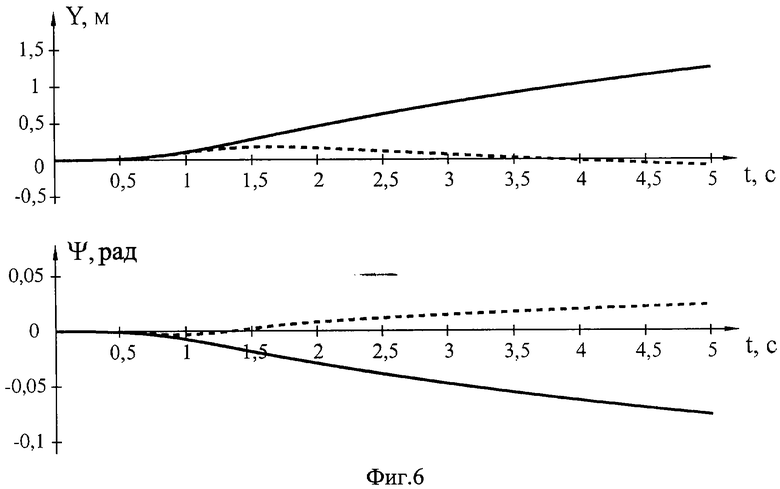
Сущность изобретения поясняется чертежами. На фиг.1 показано устройство системы корректировки траектории движения автомобиля. На фиг.2 и 3 - схематическое устройство корректирующего механизма, встроенного в рулевое управление. На фиг.4 показан пример переходного процесса по боковой скорости и методическая погрешность вычисления. На фиг.5 и 6 приведен пример работы устройства и боковой траектории движения автомобиля при аэродинамическом возмущении случайной формы.
Система содержит (см. фиг.1) два пленочных датчика 1 определения силы напора воздуха, расположенных на двух противоположных боковых поверхностях автомобиля; встроенный в рулевое управление 2 автомобиля корректирующий механизм 3 для возможного изменения угла поворота и направления вращения выходного вала рулевого управления 2 независимо от водителя; электронно-вычислительный блок 4, предназначенный для аналого-цифрового преобразования поступающего сигнала с датчиков 1 в истинное значение скорости ветра VВ. Кроме того, по найденному значению VВ электронно-вычислительный блок 4 определяет силу бокового воздействия и импульсное вращательное воздействие на управляющую червячную шестерню планетарного механизма 3 для корректировки отклонения траектории от заданного водителем движения.
Встроенный планетарный механизм (см. фиг.2) имеет два входа: ϕ1 от вала рулевого управления, связанного с рулевым колесом; и ϕ4 от червячного редуктора, приводимого электродвигателем, связанным с электронно-вычислительным блоком; и один выход - ϕ5 на выходной вал рулевого управления, связанный рулевым приводом с управляемыми колесами автомобиля.
Для внешнего зацепления 3-й шестерни и 4-го червяка имеем:
где ϕ3 - угол поворота 3-й шестерни; R32 - радиус внешнего зацепления 3-й шестерни; h4 - шаг зуба 4-го червяка.
Для внутреннего зацепления 2-й и 3-й шестерни:

где ϕ2 - угол поворота 2-й шестерни; R31 - радиус внутреннего зацепления 3-й шестерни; R2 - радиус зацепления 2-й шестерни.
Для внешнего зацепления 1-й и 2-й шестерни получаем:
где R1 - радиус зацепления 1-й шестерни.
Таким образом, угол поворота выходного вала рулевого управления будет определяться выражением:
Наличие червячного редуктора в корректирующем электроприводе позволяет застопорить шестерни 4 и 3 при отсутствии корректирующих поворотов электродвигателя, то есть получить ϕ3=ϕ4=0; при этом:
При  направление вращения вала 5 будет противоположно вращению вала 1. Таким образом, предложенная схема планетарного механизма позволяет изменять не только величину, но и направление угла поворота рулевого вала независимо от угла поворота рулевого колеса, задаваемого водителем, а также позволяет сохранить механическую связь между рулевым колесом и управляемыми колесами в случае выхода из строя корректирующего устройства, что предписывается действующими правилами, распространяющимися на механические транспортные средства.
направление вращения вала 5 будет противоположно вращению вала 1. Таким образом, предложенная схема планетарного механизма позволяет изменять не только величину, но и направление угла поворота рулевого вала независимо от угла поворота рулевого колеса, задаваемого водителем, а также позволяет сохранить механическую связь между рулевым колесом и управляемыми колесами в случае выхода из строя корректирующего устройства, что предписывается действующими правилами, распространяющимися на механические транспортные средства.
На шестерне 3 нанесены контактные дорожки Д1, Д2 и Д3 (см. фиг.3), находящиеся во взаимодействии с соответствующими контактами K1, K2 и К3. При получении сигнала с электронно-вычислительного блока электромотор (ЭМ) начинает вращать в нужном направлении червячную шестерню до того момента, пока одновременно не поступят два сигнала с первой и второй дорожки. Это свидетельствует о повороте шестерни 3 на заданный угол α1. При необходимости поворота шестерни на угол α2=2α1 или α3=3α1 отслеживается положение шестерни путем сравнения сигналов с контактов K1, K2 и К3.
Предлагаемое устройство в унифицированном виде (при изменении только диаметров входного и выходного валов под рулевое управление и параметров секторов контактных дорожек) применимо практически на всех типах автомобилей.
Теоретические сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем.
Используется частотный метод для определения корректирующего угла поворота управляемых колес δ и соответственно углов α1, α2 и α3 исполнительного механизма путем построения переходных процессов. Применение частотного метода позволяет ускорить вычислительный процесс для определения оптимального угла δ1, при котором автомобиль будет испытывать минимальные боковые и угловые отклонения, кроме того, рассматривать ветровые боковые возмущения случайного характера как по времени действия, так и по форме.
Математическая модель бокового движения автомобиля представляет собой уравнения движения автомобиля в системе осей, связанных с телом.
Уравнения движения в системе осей, связанных с телом, получаются согласно теоремам об изменении количества движения и об изменении момента количества движения относительно подвижного центра масс твердого тела:
где  - количества движения,
- количества движения,  - момент количества движения,
- момент количества движения,  - угловая скорость движения,
- угловая скорость движения,  - возмущающая сила,
- возмущающая сила,  - возмущающий момент.
- возмущающий момент.
При этом в левой части второго уравнения дополнительный член, возникающий за счет вращения подвижной системы, пропадает, так как  .
.
Учитывая то, что боковая реакция i-ом колесе, возникающая при уводе, записывается в линейном приближении в виде Fyi=Кiεi, а углы увода записываются в форме: 
 получим систему уравнений для динамической системы автомобиля:
получим систему уравнений для динамической системы автомобиля:

где m - масса автомобиля; Iz - момент инерции автомобиля; Vy и r - соответственно боковая и угловая скорости автомобиля в системе координат, связанных с телом; К1, К2 - боковые жесткости шин передней и задней оси; а1, а2 - расстояние от положения центра тяжести до передней и задней осей; Vx - продольная скорость движения автомобиля; FB(t) и MB(t) - внешние возмущающие аэродинамические сила и момент соответственно; δ1(t-τ) - корректирующий угол поворота управляемых колес; τ - время запаздывания срабатывания корректирующего механизма.
Система (2) приводится в книге Вонг, Дж. Теория наземных транспортных средств: [пер. с англ.] / Дж.Вонг; пер. с англ. А.И.Аксенова. - М.: Машиностроение, 1982. - 284 с.
Передаточная функция W(iω) по скорости, характеризующая динамическую систему автомобиля, записывается в виде:
Внешние аэродинамические силы сводятся к главному вектору FB силы, приложенной к центру тяжести автомобиля перпендикулярно его продольной оси, и главному моменту МB от силы FB с плечом LB, равным расстоянию точки приложения силы FB до центра тяжести относительно оси, перпендикулярной к боковой поверхности автомобиля.
Главный вектор аэродинамической силы FB определяется по известному соотношению:

где ρв - плотность воздуха (при нормальных условиях = 1,4 кг/м3); Амид - площадь продольного сечения автомобиля; Сх - коэффициент аэродинамического сопротивления; Vв - скорость ветра.
Возмущающий вектор боковой нагрузки с учетом корректирующей силы и момента от упругой силы, возникающей при повороте управляемых колес 
Для определения переходных процессов при случайных внешних возмущающих воздействиях воспользуемся дискретной формой обратного преобразованием Фурье [Клайф, Рэй В. Динамика сооружений / Рэй В. Клайф, Джозеф Пензиен. - М.: Стройиздат, 1979. - 320 с.]:

где X(tk)=|Vy(tk) r(tk)|T - вектор скоростей в боковом движении; tk - рассматриваемые дискретные моменты времени; Δω - шаг по частоте, принимаем равным  , Th - период действия нагрузки, N - количество равных интервалов разбиения, n - номер интервала; Δt - шаг по времени tm,
, Th - период действия нагрузки, N - количество равных интервалов разбиения, n - номер интервала; Δt - шаг по времени tm,  , М - количество равных интервалов разбиения, m - номер интервала.
, М - количество равных интервалов разбиения, m - номер интервала.
Использование периодичности множителей  и
и  позволяет существенно сократить время расчета.
позволяет существенно сократить время расчета.
При построении переходного процесса наблюдается методическая погрешность ΔX - погрешность вычисления (4), связанная с дискретизацией сигнала. Эта ошибка является постоянной величиной, определяется графически и вычитается из окончательного результата (см. фиг.4).
Сравнение переходных процессов, полученных при помощи описанной методики и численным методом Рунге-Кутта, показало полное совпадение решений, но при применении частотного метода время вычислительного процесса снижается, что позволяет определять оптимальный угол δ1 с меньшими временными затратами.
Для определения переходных процессов по перемещению необходимо проинтегрировать переходные процессы по скорости, полученные с помощью выражения (4).
Во время движения автомобиля устройство корректировки движения определяет боковую силу, действующую на автомобиль, и при превышении заданного порогового значения FП дает команду на корректирующее устройство с целью поворота управляемых колес на заданный угол:

где z - эмпирический коэффициент (z=3,48 в рассматриваемом здесь случае), определяемый путем построения переходных процессов и нахождения минимальных отклонений автомобиля при настройке системы.
Для нахождения корректирующего угла поворота δ1 путем построения переходных процессов для каждой модели автомобиля необходимо построение передаточной матрицы W(iω), а также лабораторное определение параметров Амид и Сх.
Боковая скорость ветра Vв определяется во время движения автомобиля при помощи датчика.
При снижении боковой силы менее порогового значения корректирующее устройство получает команду на возврат управляемых колес в исходное положение.
Для повышения точности регулировки применено несколько пороговых значений (расчеты показали, что достаточно трех). При переходе значения боковой силы пороговых значений устройство трижды может поворачивать управляемые колеса на равный угол α1.
Для примера рассмотрим автомобиль с параметрами: m=2650 кг, Iz=5010 кг·м2, К1=33500 Н/рад, K2=34000 Н/рад, а1=1,492 м, а2=1,268 м, LВ=0,173 м, Амид=6,345 м2, Сх=0,85; корректирующий механизм имеет τ=0,3 с.
Устанавливаем пороговые значения равными FП1=400 Н, FП2=800 Н, FП3=1200 Н, исходя из аэродинамических параметров автомобиля и учитывая максимально возможный порыв ветра VBmax=20 м/с, при котором на автомобиль действует боковая сила Fmax=1510 Н.
Эмпирический коэффициент определен описанным частотным методом и равен z=3,48. На фиг.5 показан случай ветрового возмущения с применением дважды порогового регулирования. Продольная скорость движения автомобиля Vx=100 км/ч, переходные процессы по перемещению показаны на фиг.6, где сплошной линией показан переходный процесс без воздействия корректирующего механизма, а штриховой - при работе корректирующего механизма. Переходные процессы при действии одного импульса управления воздействия получаются проще, чем рассмотренный случай. Необходимость применения устройства для коррекции более длительного ветрового возмущения (tBmax>1,5 с) не требуется, так как постоянная времени водителя позволяет ему самому реагировать на то возмущение и самостоятельно корректировать траекторию движения, поэтому система выключается.
При действии предложенного устройства (см. фиг.6) в момент времени 3 секунды после начала действия ветрового возмущения боковое и угловое отклонения составили 0,076 м и 0,0133 рад, при отсутствии корректирующего устройства 0,774 м и 0,0488 рад соответственно, то есть практически на порядок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2727291C1 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2636636C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| СПОСОБ ПРЕВЕНТИВНОГО СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА В СТОРОНУ ПОВОРОТА | 2020 |
|
RU2749154C1 |
Изобретение относится к системам активной безопасности автомобиля, а именно к системам коррекции траектории движения автомобиля при боковом ветровом возмущении с целью поддержания заданного направления движения. Система является унифицированной для любого типа автомобиля, у которого при превышении боковой ветровой нагрузки заданного порогового значения FП с запаздыванием срабатывает корректирующий механизм, встроенный в рулевое управление, осуществляющий механическим способом импульсный поворот управляемых колес автомобиля на угол:  , где K1 - боковая жесткость шин передней оси, a1 - расстояние от положения центра тяжести до передней оси автомобиля, z - заданный эмпирический коэффициент. При увеличении боковой нагрузки до следующего порогового значения вновь срабатывает корректирующий механизм и дополнительно поворачивает колеса на угол δ1, причем FП в соответствующей формуле будет разностью этих соседних пороговых значений. Указанный процесс может повторяться трижды, и при снижении боковой ветровой нагрузки менее порогового значения колеса поворачиваются обратно в обратной последовательности. При действии боковой ветровой нагрузки более 1,5 секунды колеса возвращаются в нейтральное положение в предположении, что водитель сам откорректирует траекторию движения. Достигается уменьшение времени и повышение точности коррекции заданной траектории движения автомобиля и упрощение устройства. 6 ил.
, где K1 - боковая жесткость шин передней оси, a1 - расстояние от положения центра тяжести до передней оси автомобиля, z - заданный эмпирический коэффициент. При увеличении боковой нагрузки до следующего порогового значения вновь срабатывает корректирующий механизм и дополнительно поворачивает колеса на угол δ1, причем FП в соответствующей формуле будет разностью этих соседних пороговых значений. Указанный процесс может повторяться трижды, и при снижении боковой ветровой нагрузки менее порогового значения колеса поворачиваются обратно в обратной последовательности. При действии боковой ветровой нагрузки более 1,5 секунды колеса возвращаются в нейтральное положение в предположении, что водитель сам откорректирует траекторию движения. Достигается уменьшение времени и повышение точности коррекции заданной траектории движения автомобиля и упрощение устройства. 6 ил.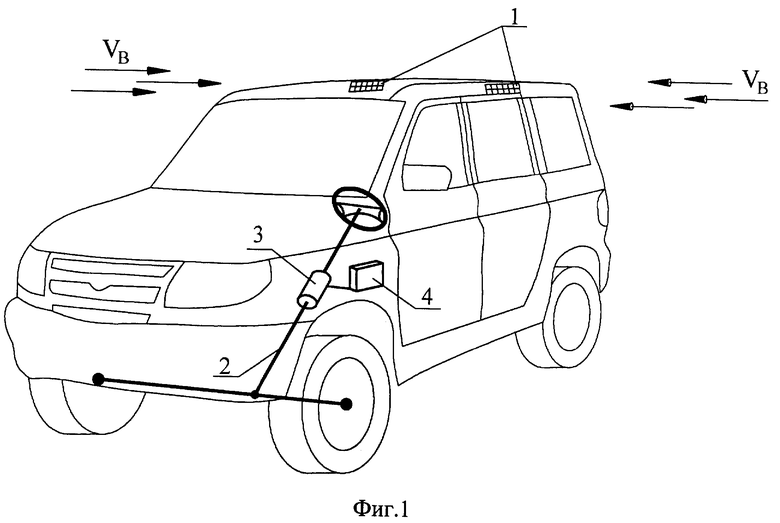
Система коррекции траектории движения автомобиля при боковом ветровом возмущении, отличающаяся тем, что устройство является унифицированным для любого типа автомобиля, у которого при превышении боковой ветровой нагрузки заданного порогового значения FП с запаздыванием срабатывает корректирующий механизм, встроенный в рулевое управление, осуществляющий механическим способом импульсный поворот управляемых колес автомобиля на угол

где K1 - боковая жесткость шин передней оси; a1 - расстояние от положения центра тяжести до передней оси автомобиля; z - заданный эмпирический коэффициент, а при увеличении боковой нагрузки до следующего порогового значения вновь срабатывает корректирующий механизм и дополнительно поворачивает колеса на угол δ1, причем FП в соответствующей формуле будет разностью этих соседних пороговых значений, при этом указанный процесс может повторяться трижды, и при снижении боковой ветровой нагрузки менее порогового значения колеса поворачиваются обратно в обратной последовательности, при действии боковой ветровой нагрузки более 1,5 с колеса возвращаются в нейтральное положение в предположении, что водитель сам откорректирует траекторию движения.
| US 5315868 A, 31.05.1994 | |||
| US 5845222 A, 01.12.1998 | |||
| US 5528497 A, 18.06.1996 | |||
| US 5703775 A, 30.12.1997 | |||
| US 5774819 A, 30.06.1998 | |||
| US 6018691 A, 25.01.2000. |

