Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления транспортным средством и к оборудованию управления транспортного средства.
Уровень техники
[0002] Известно устройство рулевого управления транспортного средства, имеющее электромотор для руления (например, см. патентный документ 1: JP2015-37932A). Когда транспортное средство находится в состоянии движения прямо вперед, мощность приведения в движение, связанная с электромотором, управляется на основе информации касательно транспортного средства, включающей в себя крутящий момент поворота при рулении и угол поворота при рулении, и вспомогательный крутящий момент в силу этого предоставляется в систему рулевого управления. Устройство рулевого управления транспортного средства, как раскрыто в патентном документе 1, работает с возможностью вычислять значение интегрирования крутящего момента, определенное посредством интегрирования крутящего момента поворота при рулении, и когда значение интегрирования крутящего момента не меньше порогового значения, выполнять управление снижением рулевого тягового усилия для мощности приведения в движение, связанной с электромотором таким образом, чтобы компенсировать явление рулевого тягового усилия транспортного средства.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2015-37932A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее возникает проблема в том, что требуется время до тех пор, пока управление снижением рулевого тягового усилия не начинается после того, как транспортное средство вызывает рулевое тяговое усилие, поскольку управление снижением рулевого тягового усилия начинается, когда транспортное средство вызывает рулевое тяговое усилие, и значение интегрирования крутящего момента поворота при рулении становится пороговым значением или больше.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления транспортным средством или оборудование управления транспортного средства, с помощью которого управление подавлением такого явления, что рассматриваемое транспортное средство притягивается к другому транспортному средству при опережении другого транспортного средства, может выполняться за меньшее время по сравнению со случаем выполнения управления снижением рулевого тягового усилия в момент времени, когда значение интегрирования крутящего момента поворота при рулении становится пороговым значением или больше, аналогично предшествующему уровню техники.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему через: выполнение управления восстановлением траектории движения рассматриваемого транспортного средства как целевой траектории, в качестве обычного управления, посредством предоставления величины руления в поперечном направлении относительно полосы движения рассматриваемого транспортного средства; использование данных обнаружения датчика для того, чтобы определять то, движется или нет другое транспортное средство в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства; и при определении того, что другое транспортное средство движется в смежной полосе движения впереди рассматриваемого транспортного средства, увеличение отклика величины руления до более высокого отклика, чем отклик при обычном управлении до того, как рассматриваемое транспортное средство опережает другое транспортное средство.
Преимущества изобретения
[0007] Согласно настоящему изобретению, может получаться такое преимущество, что управление подавлением притяжения может выполняться за короткое время.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой системы 1000 управления транспортного средства, имеющей оборудование управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса управления рулением, выполняемого посредством системы управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3 является схемой, иллюстрирующей относительное положение между диапазоном формирования изображений камеры и другим транспортным средством в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 5 является блок-схемой управления рулением, выполняемого посредством устройства управления в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 6 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 7 является графиком, иллюстрирующим характеристики величины руления в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 8 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством в системе управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. В вариантах осуществления, ниже описывается примерный случай, в котором оборудование управления транспортного средства согласно настоящему изобретению применяется к системе управления транспортного средства для транспортных средств.
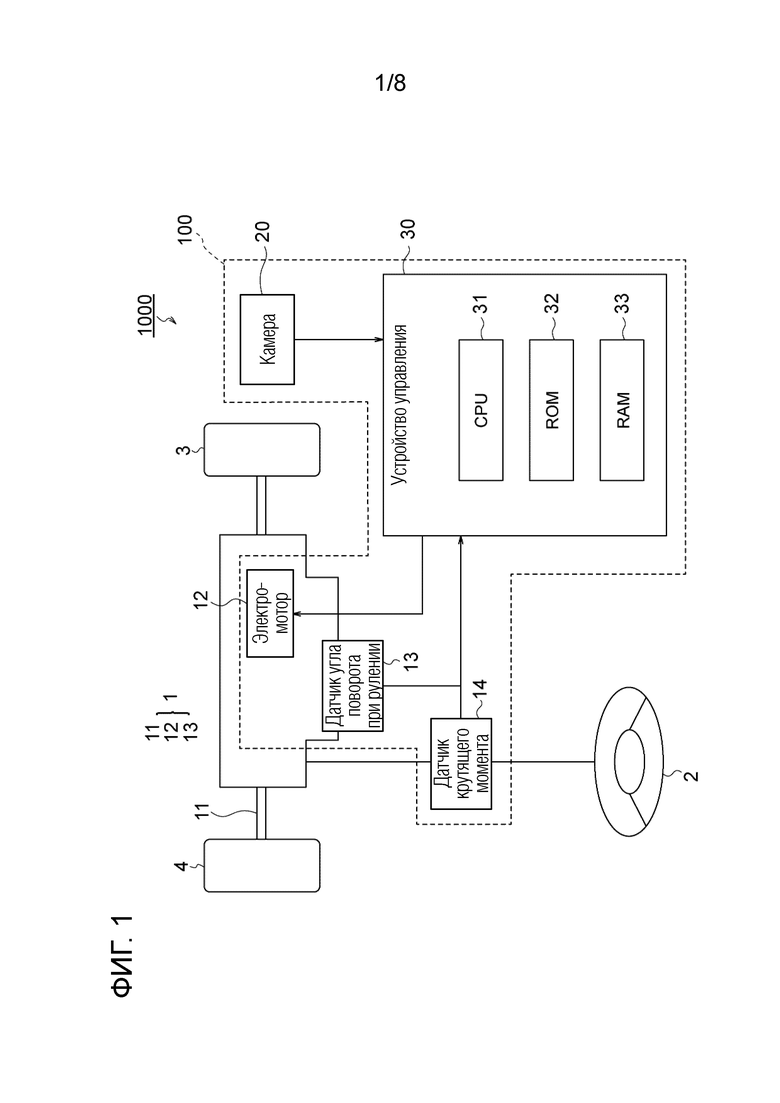
[0010] Фиг. 1 является блок-схемой системы 1000 управления транспортного средства, имеющей оборудование 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль 1 рулевого управления, руль 2, колеса 3 и 4 и оборудование 100 управления транспортного средства. Оборудование 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения осуществляет рулевое управление колесами 3 и 4 в ответ на операцию поворота руля 2.
[0011] Модуль 1 рулевого управления имеет вал 11, электромотор 12, датчик 13 угла поворота при рулении, датчик 14 крутящего момента и шестерню (не проиллюстрирована). Вал 11 соединяется с правым и левым ведущими колесами. Рулевая шестерня с реечным механизмом используется для шестерни, и передние колеса 3 и 4 рулятся в соответствии с вращением вала 11.
[0012] Электромотор 12, например, представляет собой бесщеточный электромотор, и выходной вал электромотора 12 соединяется с шестерней зубчатой рейки через редукторную шестерню и выводит крутящий момент поворота при рулении для руления передними колесами 3 и 4 в зубчатую рейку в ответ на команду управления из устройства 30 управления. Электромотор 12 также работает с возможностью предоставлять величину руления в ответ на команду управления из устройства 30 управления и выводит крутящий момент поворота при рулении. Величина руления предоставляется в модуль 1 рулевого управления для того, чтобы стимулировать руление для подавления возмущений. Например, когда возмущения, такие как боковой ветер, вводятся и затрагивают поведение транспортного средства, крутящий момент поворота при рулении для подавления возмущений предоставляется в руление, чтобы за счет этого подавлять операцию руления в направлении, в котором дует боковой ветер. Такое управление рулевым тяговым усилием для транспортного средства вследствие возмущений используется, например, в системе помощи системы недопущения выезда за пределы полосы движения и в других аналогичных системах. Когда механизм рулевого управления модуля 1 рулевого управления может электронно управляться, электромотор 3 может устанавливаться таким образом, чтобы формировать величину руления непосредственно в механизм рулевого управления. Когда модуль 1 рулевого управления сконфигурирован для электрогидравлического усилителя рулевого управления, электромотор 3 подает мощность в электронасос. Электромотор 12 соответствует "исполнительному устройству" настоящего изобретения.
[0013] Датчик 13 угла поворота при рулении определяет угол вращения электромотора 12, для того чтобы вычислять угол поворота при рулении передних колес 3 и 4. Имеется корреляция между углом вращения электромотора 12 и углом поворота при рулении передних колес 3 и 4. Датчик 13 угла поворота при рулении вычисляет угол поворота при рулении, соответствующий углу вращения электромотора, при обращении к карте, которая представляет взаимосвязь соответствия между углом вращения электромотора 12 и углом поворота при рулении передних колес 3 и 4 и за счет этого определяет угол поворота при рулении передних колес 3 и 4.
[0014] Датчик 14 крутящего момента, который предоставляется в соединительном механизме, который соединяет руль 2 и модуль 1 рулевого управления, определяет крутящий момент поворота при рулении, соответствующий величине руления руля 2, поворачиваемого водителем. Датчик 13 угла поворота при рулении и датчик 14 крутящего момента выводят определенные значения в устройство 30 управления.
[0015] Камера 20 предоставляется в качестве устройства формирования изображений, которое формирует изображение состояния впереди транспортного средства. Камера 20, которая работает в то время, когда транспортное средство движется, используется в качестве датчика, который обнаруживает окрестности транспортного средства. Камера 20 выводит данные захваченных изображений в устройство 30 управления. Датчик, который выполняет обнаружение впереди транспортного средства, не ограничен камерой 20 и также может представлять собой радар, сонар или другое аналогичное устройство. Помимо этого или альтернативно, например, рассматриваемое транспортное средство может получать информацию относительно других транспортных средств с использованием связи между транспортными средствами, чтобы за счет этого обнаруживать состояние впереди рассматриваемого транспортного средства.
[0016] Оборудование 100 управления транспортного средства включает в себя электромотор 12, датчик 13 угла поворота при рулении, датчик 14 крутящего момента, камеру 20 и устройство 30 управления. Эти компоненты оборудования 100 управления транспортного средства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией. Оборудование 100 управления транспортного средства выполняет управление рулением на основе данных обнаружения, которые вводятся из датчика 13 угла поворота при рулении и датчика 14 крутящего момента. Когда сдвиг возникает между величиной руления руля 2 и фактическим углом поворота при рулении, определенным посредством датчика 13 угла поворота при рулении, оборудование 100 управления транспортного средства вычисляет величину руления управления таким образом, что угол поворота при рулении, определенный посредством датчика 13 угла поворота при рулении, совпадает с величиной руления руля 2, и выводит значение команды управления, соответствующее величине руления управления, в электромотор 12.
[0017] Устройство 30 управления оборудования 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM 32, которое сохраняет программу управления транспортным средством, CPU 31 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 32, так что он служит в качестве оборудования 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения, и RAM 33, которое служит в качестве доступного устройства хранения данных.
[0018] Программа управления транспортным средством согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу для выполнения процедуры управления, которая включает в себя обнаружение состояния вокруг транспортного средства, выполнение управления рулением транспортного средства в соответствии с результатом обнаружения и формирование поперечного перемещения транспортного средства. Эта программа выполняется посредством устройства 30 управления оборудования 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
[0019] Устройство 30 управления оборудования 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения заключает в себе процесс обнаружения окружающей ситуации, функцию вычисления для вычисления значения команды управления для предоставления величины руления и функцию выполнения процесса управления рулением. Устройство 30 управления выполняет каждый из вышеуказанных процессов и функций посредством взаимодействия программного обеспечения для реализации каждого процесса или функции и вышеописанных аппаратных средств.
[0020] Здесь, описывается такое явление, что рассматриваемое транспортное средство притягивается к другому транспортному средству при опережении другого транспортного средства. Другое транспортное средство, например, представляет собой крупногабаритный автомобиль, и классификация крупногабаритных автомобилей может предварительно определяться, например, посредством веса транспортного средства и т.п. Крупногабаритный автомобиль представляет собой транспортное средство, в котором, например, когда рассматриваемое транспортное средство движется на стороне крупногабаритного автомобиля, возникает такое явление, что рассматриваемое транспортное средство притягивается к крупногабаритному автомобилю. Крупногабаритные автомобили представляют собой такие транспортные средства, как автобусы и грузовики.
[0021] Предполагается, что рассматриваемое транспортное средство и другое транспортное средство движутся, например, по прямой скоростной автомагистрали. Условия движения рассматриваемого транспортного средства и другого транспортного средства являются следующими. Другое транспортное средство движется в левосторонней полосе движения, в то время как рассматриваемое транспортное средство движется в правосторонней полосе движения (полосе обгона). Другое транспортное средство движется впереди рассматриваемого транспортного средства 40, и скорость (V1) транспортного средства для рассматриваемого транспортного средства 40 выше скорости (V2) транспортного средства для другого транспортного средства таким образом, что рассматриваемое транспортное средство приближается вплотную к другому транспортному средству со временем.
[0022] Когда рассматриваемое транспортное средство приближается вплотную к другому транспортному средству сзади, другое транспортное средство движется слева впереди рассматриваемого транспортного средства в состоянии нахождения близко к рассматриваемому транспортному средству. В это время, разность расхода возникает между воздухом, протекающим влево и вправо относительно рассматриваемого транспортного средства. Когда, в направлении движения рассматриваемого транспортного средства, воздушный поток ближе к другому транспортному средству представляет собой AL, и воздушный поток дальше от другого транспортного средства представляет собой AR, расход воздушного потока (AL) ниже расхода воздушного потока (AR).
[0023] По сути, когда рассматриваемое транспортное средство приближается вплотную к другому транспортному средству, и рассматриваемое транспортное средство движется с возможностью опережать другое транспортное средство, рассматриваемое транспортное средство притягивается к стороне другого транспортного средства (в дальнейшем это явление также называется "явлением притяжения"). Когда водитель рассматриваемого транспортного средства воспринимает явление притяжения к другому транспортному средству, водитель поворачивает руль 2 таким образом, чтобы отрываться от другого транспортного средства. В это время, руль 2 принимает силу поворота при рулении в направлении приближения вплотную к другому транспортному средству; в силу этого, для того чтобы формировать силу реакции в силу поворота при рулении, крутящий момент поворота при рулении должен увеличиваться.
[0024] При условии, что явление притяжения представляет собой возмущения, также есть возможность использовать систему помощи системы недопущения выезда за пределы полосы движения для того, чтобы восстанавливать траекторию движения рассматриваемого транспортного средства как целевую траекторию (линейную траекторию). Тем не менее, при управлении рулением, используемом в системе помощи системы недопущения выезда за пределы полосы движения, управление рулением выполняется, когда рассматриваемое транспортное средство принимает возмущения, и система обнаруживает то, что рассматриваемое транспортное средство притягивается к другому транспортному средству. Таким образом, требуется время до тех пор, пока управление для подавления явления притяжения не выполняется, после того, как система обнаруживает явление притяжения. Оборудование 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения выполняет управление для подавления явления притяжения за короткое время посредством способа управления транспортным средством, который описывается ниже.
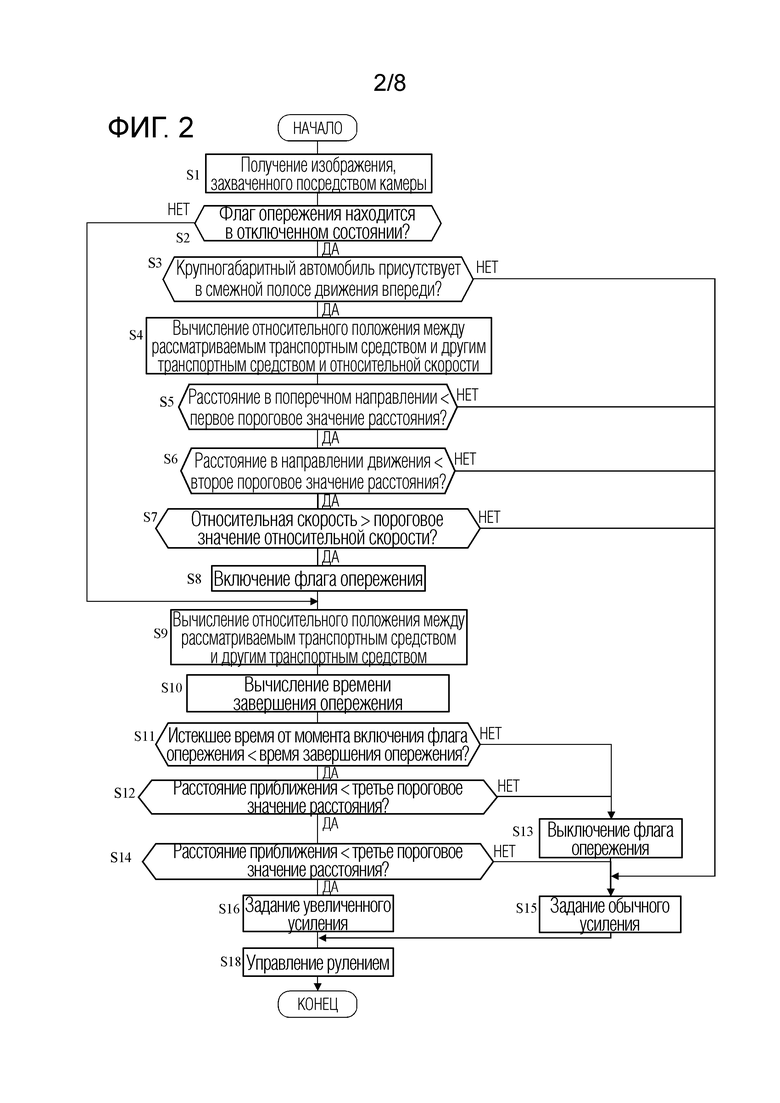
[0025] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса управления рулением, выполняемого посредством системы 1000 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения. Последовательность операций управления, проиллюстрированная на фиг. 2, многократно выполняется в предварительно определенном цикле.
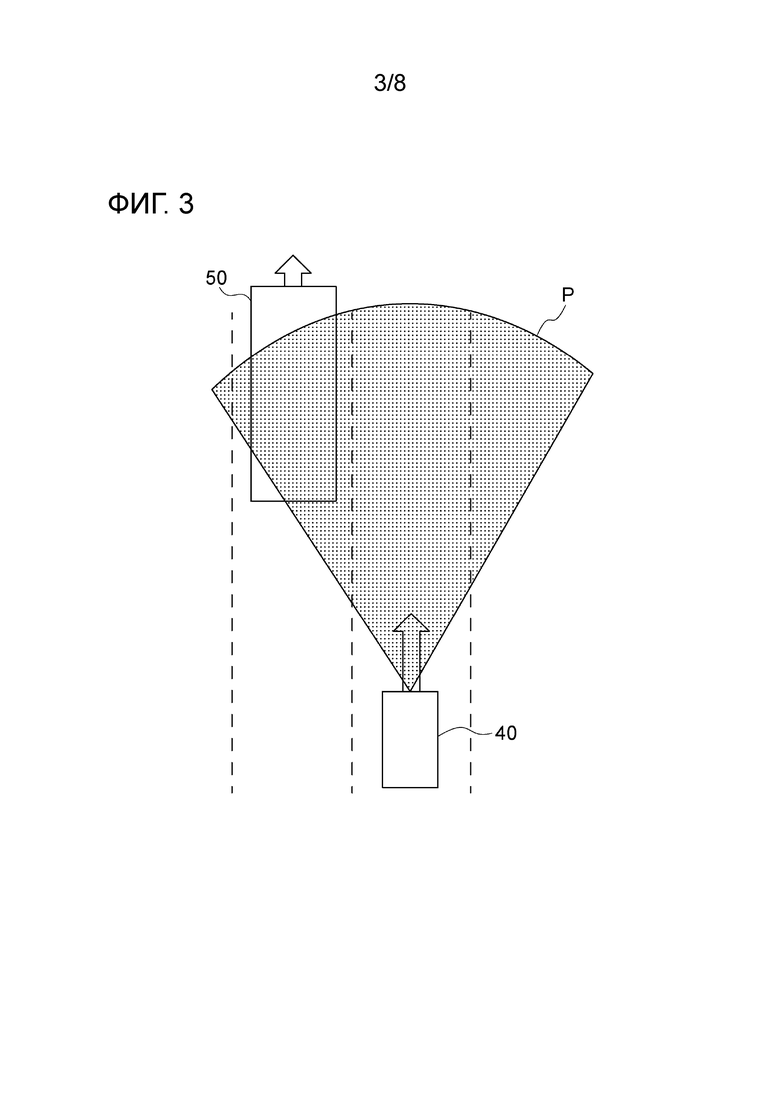
[0026] На этапе 1, устройство 30 управления получает изображение, захваченное посредством камеры 20. Фиг. 3 является схемой, иллюстрирующей относительное положение между диапазоном P формирования изображений камеры 20 и другим транспортным средством 50. Камера 20 устанавливается в передней части рассматриваемого транспортного средства 40. Например, камера 20 устанавливается около центра над ветровым стеклом. Как проиллюстрировано на фиг. 3, когда другое транспортное средство 50 движется в смежной полосе движения впереди рассматриваемого транспортного средства 40, другое транспортное средство 50 включено в диапазон формирования изображений камеры 20.
[0027] На этапе 2, устройство 30 управления определяет то, находится или нет флаг опережения в отключенном состоянии. Флаг опережения, который представляет значение, которое указывает то, собирается или нет рассматриваемое транспортное средство 40 опережать крупногабаритный автомобиль, сохраняется в запоминающем устройстве (не проиллюстрировано) устройства 30 управления. Когда рассматриваемое транспортное средство 40 собирается опережать крупногабаритный автомобиль, флаг опережения включается. Флаг опережения включается при удовлетворении условия опережения, которое предварительно задается. Определение в отношении того, удовлетворяется или нет условие опережения, выполняется до того, как рассматриваемое транспортное средство фактически опережает другое транспортное средство в качестве объекта, который должен опережаться.
[0028] Когда флаг опережения находится в отключенном состоянии, последовательность операций управления по этапу 3 выполняется. С другой стороны, когда флаг опережения находится во включенном состоянии, последовательность операций управления по этапу 9 выполняется.
[0029] Условие опережения задается посредством размера другого транспортного средства, движущегося впереди рассматриваемого транспортного средства, относительного положения между рассматриваемым транспортным средством и другим транспортным средством и относительной скорости рассматриваемого транспортного средства по отношению к другому транспортному средству. Последовательность операций для определения того, удовлетворяется или нет условие опережения, соответствует последовательности операций управления по этапам 3-7.
[0030] На этапе 3, устройство 30 управления определяет то, присутствует или нет крупногабаритный автомобиль в смежной полосе движения впереди. В частности, устройство 30 управления получает изображение, захваченное посредством камеры 20, и указывает изображение транспортного средства из захваченного изображения. Изображение транспортного средства представляет собой изображение при просмотре сзади транспортного средства. Устройство 30 управления измеряет область изображения транспортного средства. Размер изображения транспортного средства соответствует области изображения транспортного средства. Устройство 30 управления сравнивает область изображения транспортного средства с пороговым значением области, представляющим крупногабаритный автомобиль, и когда область изображения транспортного средства превышает пороговое значение области, определяет то, что впереди идущее транспортное средство представляет собой крупногабаритный автомобиль. Когда устройство 30 управления определяет то, что крупногабаритный автомобиль присутствует в смежной полосе движения впереди, последовательность операций управления по этапу 4 выполняется. С другой стороны, когда устройство 30 управления определяет то, что крупногабаритный автомобиль не присутствует в смежной полосе движения впереди, последовательность операций управления по этапу 15 выполняется. Критерии для устройства 30 управления, чтобы определять то, присутствует или нет крупногабаритное транспортное средство, могут включать в себя не только размер изображения транспортного средства, но также и расстояние между рассматриваемым транспортным средством и другим транспортным средством, относительную скорость другого транспортного средства по отношению к рассматриваемому транспортному средству и т.д.
[0031] На этапе 4, устройство 30 управления использует изображение, захваченное посредством камеры 20, для того чтобы вычислять относительное положение между рассматриваемым транспортным средством и другим транспортным средством и относительную скорость другого транспортного средства по отношению к рассматриваемому транспортному средству. Камера 20 последовательно захватывает изображения впереди рассматриваемого транспортного средства в предварительно определенном цикле. Устройство 30 управления получает разность между последовательно захваченными изображениями и вычисляет относительную скорость (Vref) из разности и текущей скорости транспортного средства для рассматриваемого транспортного средства.
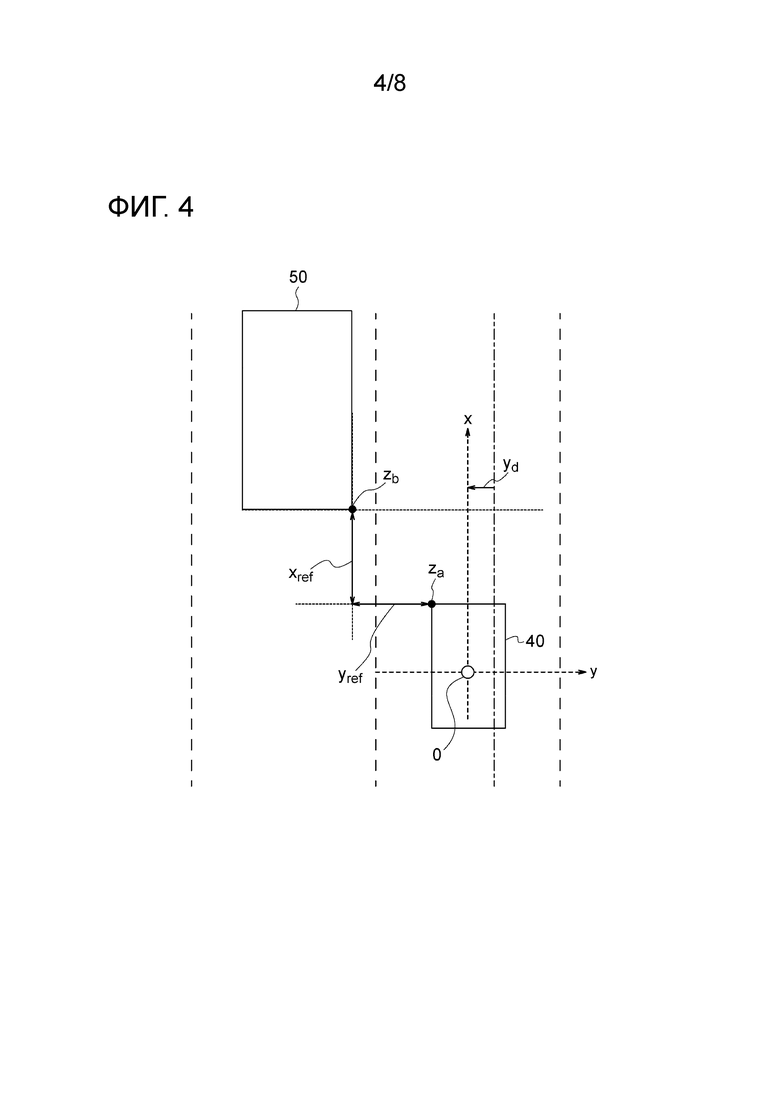
[0032] Фиг. 4 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством. Как проиллюстрировано на фиг. 4, другое транспортное средство 50 движется в смежной полосе движения впереди рассматриваемого транспортного средства 40. Центральная точка O рассматриваемого транспортного средства 40 представляет собой начало координат, направление движения рассматриваемого транспортного средства 40 представляет собой направление по оси Х, и поперечное направление представляет собой направление по оси Y. Поперечное направление рассматриваемого транспортного средства представляет собой направление, ортогональное к направлению движения рассматриваемого транспортного средства 40 на поверхности дороги. Устройство 30 управления указывает задний конец Zb другого транспортного средства 50 из изображения, захваченного посредством камеры 20. Задний конец Zb представляет собой вершину, ближайшую к рассматриваемому транспортному средству 40, из вершин в четырех углах, при просмотре другого транспортного средства 50 непосредственно сверху. Как проиллюстрировано на фиг. 4, когда другое транспортное средство 50 движется с левой стороны впереди рассматриваемого транспортного средства 40, задний конец Zb представляет собой точку, позиционированную в нижнем правом углу, при просмотре другого транспортного средства 50 непосредственно сверху. Устройство 30 управления также указывает передний конец Za рассматриваемого транспортного средства. Передний конец Za представляет собой вершину, ближайшую к другому транспортному средству 50, из вершин в четырех углах, при просмотре рассматриваемого транспортного средства 40 непосредственно сверху. Позиции переднего конца Za и заднего конца Zb могут представляться посредством координат позиции с центральной точкой O в качестве начала координат.
[0033] Устройство 30 управления вычисляет расстояние между транспортными средствами в направлении по оси Х и расстояние между транспортными средствами в направлении по оси Y. Расстояние xref между транспортными средствами в направлении по оси Х представляет длину (продольную длину) компонента по оси X расстояния от переднего конца, Za рассматриваемого транспортного средства до заднего конца Zb другого транспортного средства, и расстояние yref между транспортными средствами в направлении по оси Y представляет длину компонента по оси Y (поперечную длину) расстояния от переднего конца Za рассматриваемого транспортного средства до заднего конца Zb другого транспортного средства.
[0034] Устройство 30 управления также вычисляет величину (yd) сдвига (величину отклонения) в направлении по оси Y. Величина сдвига представляет абсолютную величину сдвига относительно центральной линии C полосы движения рассматриваемого транспортного средства 40. Центральная линия C (центральная линия полосы движения) представляет собой линию, расположенную в центре граничной линии (сигнальной линии дорожной разметки), которая разделяет полосу движения. Величина (yd) сдвига представляет собой расстояние между центральной линией C и осью X. Чем больше величина (yd) сдвига, тем короче поперечное расстояние приближения между рассматриваемым транспортным средством 40 и другим транспортным средством 50. Когда другое транспортное средство присутствует с левой стороны относительно рассматриваемого транспортного средства, величина (yd) сдвига принимает положительное значение в направлении влево от центральной линии C. Когда другое транспортное средство присутствует с правой стороны относительно рассматриваемого транспортного средства, величина (yd) сдвига принимает положительное значение в направлении вправо от центральной линии C. Величина (yd) сдвига, большая нуля, означает то, что рассматриваемое транспортное средство находится ближе к другому транспортному средству, чем центральная линия C.
[0035] На этапе 5, устройство 30 управления сравнивает поперечное расстояние (yref) между транспортными средствами с первым пороговым значением (yth_a) расстояния, чтобы определять то, меньше или нет поперечное расстояние (yref) между транспортными средствами первого порогового значения (yth_a) расстояния. Первое пороговое значение (yth_a) расстояния представляет собой пороговое значение для определения того, что поперечное разнесение между рассматриваемым транспортным средством и другим транспортным средством является небольшим. Первое пороговое значение (yth_a) расстояния, которое представляет длину в направлении по оси Y, представляет собой пороговое значение, которое предварительно задается. Когда поперечное расстояние (yref) между транспортными средствами меньше первого порогового значения (yth_a) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 6. Когда поперечное расстояние (yref) между транспортными средствами не меньше первого порогового значения (yth_a) расстояния, устройство 30 управления определяет то, что отсутствует другое транспортное средство с коротким расстоянием между транспортными средствами в поперечном направлении рассматриваемого транспортного средства, и не выполняет последовательность операций управления по этапу 15.
[0036] На этапе 6, устройство 30 управления сравнивает расстояние (xref) между транспортными средствами в направлении движения со вторым пороговым значением (xth_a) расстояния, чтобы определять то, меньше или нет расстояние (xref) между транспортными средствами в направлении движения второго порогового значения (xth_a) расстояния. Второе пороговое значение (xth_a) расстояния представляет собой пороговое значение для определения того, что разнесение в направлении движения между рассматриваемым транспортным средством и другим транспортным средством является небольшим. Второе пороговое значение (xth_a) расстояния, которое представляет длину в направлении по оси Х, представляет собой пороговое значение, которое предварительно задается. Когда расстояние (xref) между транспортными средствами в направлении движения меньше второго порогового значения (xth_a) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 7. Когда расстояние (xref) между транспортными средствами в направлении движения не меньше второго порогового значения (xth_a) расстояния, устройство 30 управления определяет то, что другое транспортное средство с коротким расстоянием между транспортными средствами в направлении движения рассматриваемого транспортного средства не присутствует в смежной полосе движения, и выполняет последовательность операций управления по этапу 15.
[0037] На этапе 7, устройство 30 управления сравнивает относительную скорость (Vref) с пороговым значением (Vth) относительной скорости, чтобы определять то, выше или нет относительная скорость (Vref) порогового значения (Vth) относительной скорости. Пороговое значение (Vth) относительной скорости представляет собой пороговое значение определения, которое указывает то, что рассматриваемое транспортное средство продолжает приближаться вплотную к другому транспортному средству со временем. Пороговое значение (Vth) относительной скорости представляет собой пороговое значение, которое предварительно задается. Когда относительная скорость (Vref) выше порогового значения (Vth) относительной скорости, устройство 30 управления выполняет последовательность операций управления по этапу 8.
[0038] Таким образом, когда имеется другое транспортное средство с короткими расстояниями между транспортными средствами в направлении по оси Х и направлении по оси Y рассматриваемого транспортного средства, и рассматриваемое транспортное средство приближается вплотную к другому транспортному средству сзади со временем, устройство 30 управления определяет то, что условие опережения удовлетворяется. С другой стороны, когда относительная скорость (Vref) не выше порогового значения (Vth) относительной скорости, устройство 30 управления определяет то, что рассматриваемое транспортное средство не приближается вплотную к другому транспортному средству со временем, и выполняет последовательность операций управления по этапу 10.
[0039] На этапе 8, устройство 30 управления переключает флаг опережения из выключенного состояния во включенное. На этапе 9, устройство 30 управления использует изображение, захваченное посредством камеры 20, для того чтобы вычислять относительное положение между рассматриваемым транспортным средством и другим транспортным средством и относительную скорость (Vref) другого транспортного средства по отношению к рассматриваемому транспортному средству. Относительное положение между рассматриваемым транспортным средством и другим транспортным средством представляется посредством расстояния (xref) между транспортными средствами в направлении движения и расстояния (yref) между транспортными средствами в поперечном направлении. Когда последовательность операций управления по этапу 9 выполняется сразу после того, как флаг опережения включается, могут использоваться относительное положение (xref, yref) между рассматриваемым транспортным средством и другим транспортным средством, величина (yd) сдвига и относительная скорость (Vref), которые вычисляются в последовательности операций управления по этапу 4.
[0040] На этапе 10, устройство 30 управления вычисляет время (tend) завершения опережения с использованием относительного положения (xref) и относительной скорости (Vref). Время (tend) завершения опережения может получаться, например, посредством суммирования расстояния (xref) между транспортными средствами в направлении движения с длиной другого транспортного средства в направлении по оси Х и деления полученного значения на относительную скорость (Vref).
[0041] На этапе 11, устройство 30 управления сравнивает истекшее время (td) от времени, когда флаг опережения включается, со временем (tend) завершения опережения. Когда истекшее время (td) меньше времени (tend) завершения опережения, устройство 30 управления определяет то, что опережение не завершается, и выполняет последовательность операций управления по этапу 12. С другой стороны, когда истекшее время (td) не меньше времени (tend) завершения опережения, устройство 30 управления определяет то, что опережение завершается, и выполняет последовательность операций управления по этапу 13. В последовательности операций управления по этапу 13, устройство 30 управления переключает флаг опережения в отключенное состояние.
[0042] На этапе 12, устройство 30 управления вычисляет расстояние (Lref) приближения между рассматриваемым транспортным средством и другим транспортным средством и сравнивает расстояние (Lref) приближения с третьим пороговым значением (Lth) расстояния. Расстояние (Lref) приближения соответствует расстоянию от переднего конца Za рассматриваемого транспортного средства до заднего конца Zb другого транспортного средства. Расстояние (Lref) приближения представляет собой пороговое значение для определения того, что рассматриваемое транспортное средство приближается вплотную к другому транспортному средству сзади. Когда расстояние (Lref) приближения меньше третьего порогового значения (Lth) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 14. Когда расстояние (Lref) приближения не меньше третьего порогового значения (Lth) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 13. На этапе 13, устройство 30 управления выключает флаг опережения. Затем устройство 30 управления выполняет последовательность операций управления по этапу 15.
[0043] На этапе 14, устройство 30 управления сравнивает величину (yd) сдвига с четвертым пороговым значением (yd_th) расстояния. Четвертое пороговое значение (yd_th) расстояния представляет собой пороговое значение для определения того, находится или нет рассматриваемое транспортное средство ближе к стороне другого транспортного средства, чем центральная линия C полосы движения. Четвертое пороговое значение (yd_th) расстояния представляет собой значение в нуль или больше. Когда величина (yd) сдвига превышает четвертое пороговое значение (yd_th) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 16. С другой стороны, когда величина (yd) сдвига не превышает четвертое пороговое значение (yd_th) расстояния, устройство 30 управления выполняет последовательность операций управления по этапу 15.
[0044] На этапе 15, устройство 30 управления задает интегральное усиление (ki) для увеличения равным обычному усилению. Обычное усиление равно единице. На этапе 16, устройство 30 управления задает интегральное усиление (ki) для увеличения равным увеличенному усилению. Увеличенное усиление имеет значение, большее единицы. На этапе 17, устройство 30 управления выполняет функциональное управление с использованием усиления для увеличения интегрального члена, которое задается на этапе 15 или на этапе 16.
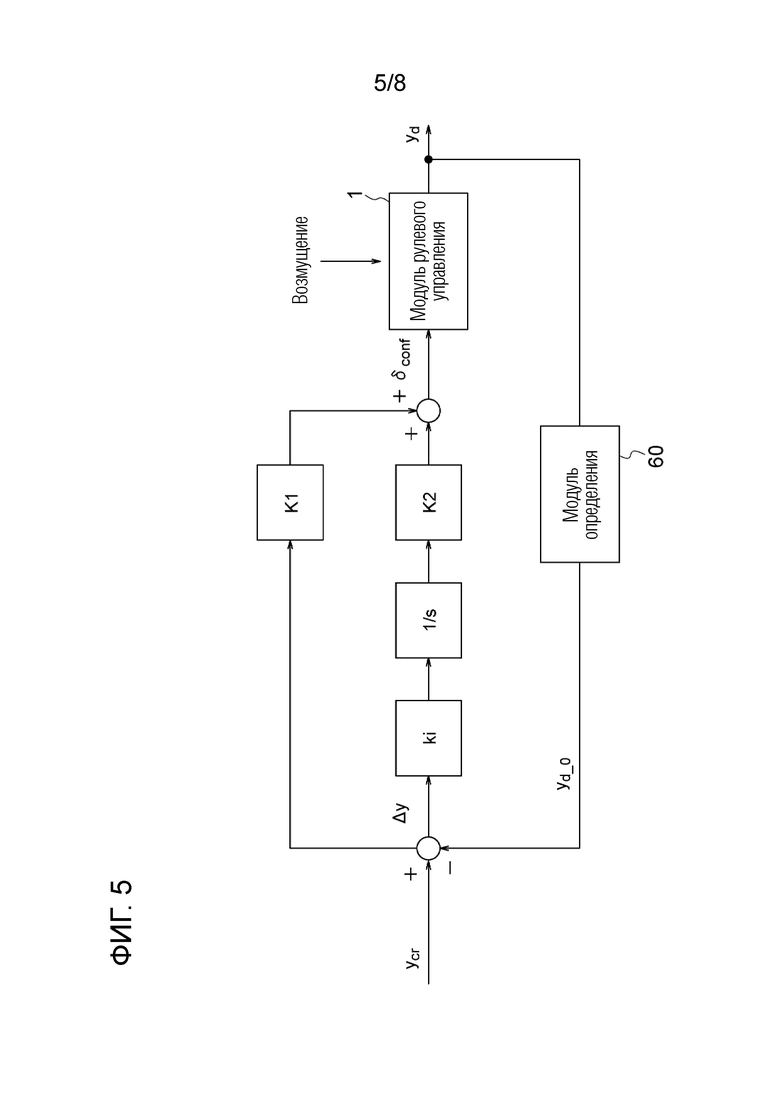
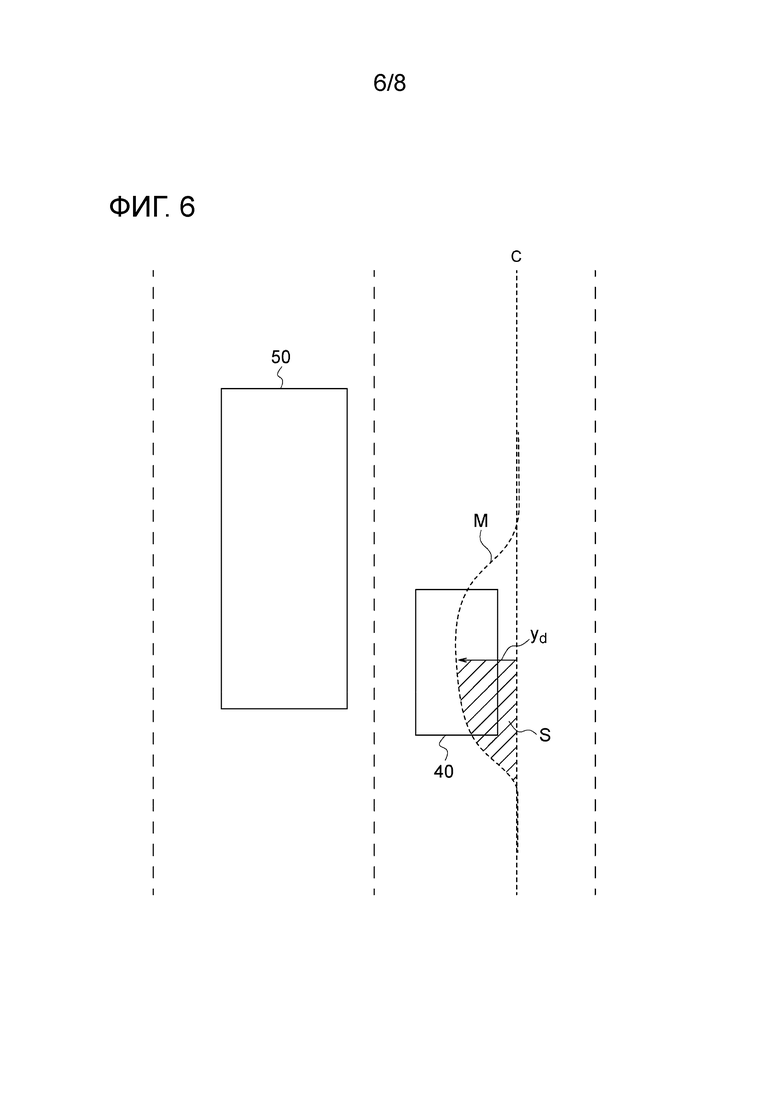
[0045] В дальнейшем описываются подробности последовательности операций управления от этапа 15 до этапа 17 со ссылкой на фиг. 5. Фиг. 5 является блок-схемой управления рулением. Фиг. 6 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством.
[0046] Устройство 30 управления имеет ввод значения (ycr) команды управления величины сдвига и вывод величины (δconf) управления рулением. Величина (δconf) управления рулением представляется посредством значения команды управления крутящим моментом поворота при рулении, требуемого для того, чтобы формировать величину руления. Значение команды управления крутящим моментом поворота при рулении вводится в модуль 1 рулевого управления, который выводит величину руления (крутящий момент поворота при рулении), соответствующую значению команды управления. K1 представляет передаточный элемент, когда значение (ycr) команды управления величины сдвига представляет собой ввод, и величина руления представляет собой вывод. K2 представляет передаточный элемент, когда разность (Δy) представляет собой ввод, и величина руления представляет собой вывод. Разность (Δy) представляет собой разность (Δyd) между значением (ycr) команды управления величины сдвига и величиной (yd_0) сдвига, которая определяется посредством датчика; ki представляет интегральное усиление для увеличения.
[0047] Значение (ycr) команды управления величины сдвига представляет собой целевое значение для перемещения рассматриваемого транспортного средства 40 в поперечном направлении, так что траектория движения рассматриваемого транспортного средства 40 должна совпадать с целевой траекторией рассматриваемого транспортного средства 40, когда позиция рассматриваемого транспортного средства 40 сдвигается относительно центральной линии C полосы движения. Траектория движения рассматриваемого транспортного средства представляет траекторию по намеченному пути, по которому фактически движется рассматриваемое транспортное средство. Целевая траектория представляет собой траекторию движения, которая должна быть целью, когда рассматриваемое транспортное средство движется посредством автоматизированного или автономного вождения и т.п. Целевая траектория может получаться, например, с использованием изображения, захваченного посредством камеры 12, и т.п. Устройство 30 управления вычисляет величину (δconf) управления рулением для значения (ycr) команды управления величины сдвига с использованием передаточной функции, проиллюстрированной в качестве блок-схемы по фиг. 5. Модуль 1 рулевого управления выводит крутящий момент поворота при рулении для ввода величины (δconf) управления рулением. На практике, вывод модуля 1 рулевого управления представляет собой крутящий момент поворота при рулении для передних колес 3 и 4, но в описательных целях, фиг. 5 иллюстрирует вывод в качестве величины (yd) сдвига рассматриваемого транспортного средства 40 в поперечном направлении. Эта величина (yd) сдвига представляет величину сдвига рассматриваемого транспортного средства 40 после того, как передние колеса 3 и 4 рулятся в соответствии с величиной (δconf) управления рулением. Если возникают возмущения, величина сдвига, соответствующая выводу модуля 1 рулевого управления, должна значительно отклоняться от значения (ycr) команды управления.
[0048] Передаточная функция, которая представляет собой функцию управления для предоставления величины руления для величины (yd) сдвига, включает в себя пропорциональный член, пропорциональный значению (ycr) команды управления, и член обратной связи (FB) в ответ на разность (Δy) величины сдвига. Пропорциональный коэффициент пропорционального члена составляет K1. FB-член служит для того, чтобы возвращать значение определения, определенное посредством модуля 60 определения, принимать разность между значением определения и значением команды управления величины сдвига и вычислять значение интеграла для разности.
[0049] Передаточная функция представляется посредством следующего выражения (1).
(выражение 1)

[0050] При условии, что величина руления, когда рассматриваемое транспортное средство 40 притягивается к другому транспортному средству 50, составляет δp, величина руления на противоположной стороне в направление притягивания превышает величину (δp) руления, когда следующее выражение (2) удовлетворяется. Когда рассматриваемое транспортное средство притягивается к крупногабаритному автомобилю, поперечная сила на шинах, необходимая для того, чтобы компенсировать силу притягивания к крупногабаритному автомобилю, формируется, и траектория движения рассматриваемого транспортного средства восстанавливается как целевая траектория.
(выражение 2)

[0051] Как описано в выражении (1), передаточная функция включает в себя интегральный член; в силу этого величина руления для поперечного сдвига (отклонения) рассматриваемого транспортного средства увеличивается во времени. Кроме того, интегральный член включает в себя интегральное усиление (ki) для увеличения; в силу этого величина руления увеличивается по мере того, как увеличивается интегральное усиление (ki) для увеличения. Кроме того, интегральный член представляется посредством интегрального выражения разности (Δy) величины сдвига; в силу этого величина руления (величина управления рулением) увеличивается по мере того, как величина поперечного сдвига между траекторией движения рассматриваемого транспортного средства и целевой траекторией увеличивается.
[0052] Как проиллюстрировано на фиг. 6, когда явление притяжения возникает, траектория M движения рассматриваемого транспортного средства расширяется к стороне другого транспортного средства относительно целевой траектории C. Целевая траектория C рассматривается в качестве центральной линии полосы движения. Площадь (S) области, окруженной посредством траектории M движения и целевой траектории C, представляет собой интегрированное значение в единицу времени величины (yd) сдвига. В одном или более вариантов осуществления настоящего изобретения, интегральный член включает в себя интегральное усиление для увеличения (ki>1); в силу этого величина расширения траектории M движения к стороне другого транспортного средства является небольшой, и площадь (S) также является небольшой.
[0053] В одном или более вариантов осуществления настоящего изобретения, управление рулением посредством системы недопущения выезда за пределы полосы движения выполняется в качестве управления в обычные времена. В системе недопущения выезда за пределы полосы движения, интегральное усиление (ki) для увеличения задается равным обычному усилению. Устройство 30 управления обнаруживает состояние впереди транспортного средства с использованием камеры 12 и определяет то, удовлетворяется или нет условие опережения. Когда крупногабаритный автомобиль движется в смежной полосе движения впереди рассматриваемого транспортного средства, и условие опережения удовлетворяется, устройство 30 управления задает интегральное усиление (ki) для увеличения равным увеличенному усилению до того, как рассматриваемое транспортное средство фактически обгоняет другое транспортное средство. После того, как интегральное усиление (ki) для увеличения задается равным увеличенному усилению, когда рассматриваемое транспортное средство приближается вплотную к другому транспортному средству, и позиция рассматриваемого транспортного средства находится на стороне другого транспортного средства, явление притяжения возникает с большой вероятностью.
[0054] Когда явление притяжения возникает, рассматриваемое транспортное средство отклоняется в поперечном направлении таким образом, что оно притягивается к другому транспортному средству. Чтобы не допускать притягивания к другому транспортному средству, руль 2 поворачивается в противоположном направлении по отношению к направлению притягивания. Операция поворота руля 2 может представлять собой операцию посредством автоматизированного или автономного вождения либо также может быть представлять собой водителя. В этой операции согласно одному или более вариантов осуществления настоящего изобретения, интегральное усиление (ki) для увеличения в системе недопущения выезда за пределы полосы движения задается равным увеличенному усилению, и в силу этого отклик величины руления в функциональный ввод руля 2 выше отклика в обычные времена. Другими словами, величина руления (крутящий момент поворота при рулении) для предоставления величины руления для рабочей величины руля превышает величину руления (крутящий момент поворота при рулении), которая выводится в обычные времена. Таким образом, в одном или более вариантов осуществления настоящего изобретения, можно прогнозировать заранее, что рассматриваемое транспортное средство должно притягиваться к другому транспортному средству. Следовательно, система может выполнять управление рулением для предоставления величины руления (в дальнейшем также называемое "управлением подавлением притяжения") за короткое время после того, как возникает явление притяжения. Кроме того, когда рассматриваемое транспортное средство опережает крупногабаритный автомобиль, способность к придерживанию целевой траектории может повышаться.
[0055] В одном или более вариантов осуществления настоящего изобретения, система помощи при вождении, включающая в себя систему недопущения выезда за пределы полосы движения (систему удержания на полосе движения), может иметь функцию автоматизированного или автономного вождения. Автоматизированное или автономное вождение включает в себя управление углом поворота при рулении, скоростью транспортного средства и т.д. таким образом, что рассматриваемое транспортное средство движется вдоль целевой траектории. В системе помощи при вождении, когда траектория движения рассматриваемого транспортного средства сдвигается относительно целевой траектории, к примеру, вследствие возмущений, и рассматриваемое транспортное средство отклоняется в поперечном направлении, величина руления предоставляется в соответствии с величиной поперечного сдвига, чтобы выполнять управление рулением автоматизированным или автономным способом. В одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство выезжает за пределы полосы движения в состоянии, в котором условие обгона не удовлетворяется, управление рулением выполняется автоматизированным или автономным способом с откликом при обычном управлении. С другой стороны, когда явление притяжения возникает в состоянии, в котором условие обгона удовлетворяется, управление рулением выполняется автоматизированным или автономным способом с более высоким откликом, чем отклик при обычном управлении.
[0056] Система помощи при вождении, включающая в себя систему недопущения выезда за пределы полосы движения (систему удержания на полосе движения), не обязательно может иметь функции автоматизированного или автономного вождения. Например, может использоваться система, в которой когда рассматриваемое транспортное средство ведет себя таким образом, что оно выезжает за пределы обнаруженной полосы движения, водитель уведомляется в отношении выезда за пределы полосы движения посредством отображения предупреждения или предупреждающего звука, и когда водитель выполняет операцию руления таким образом, чтобы восстанавливаться в полосу движения, выполняется помощь при операции руления водителем.
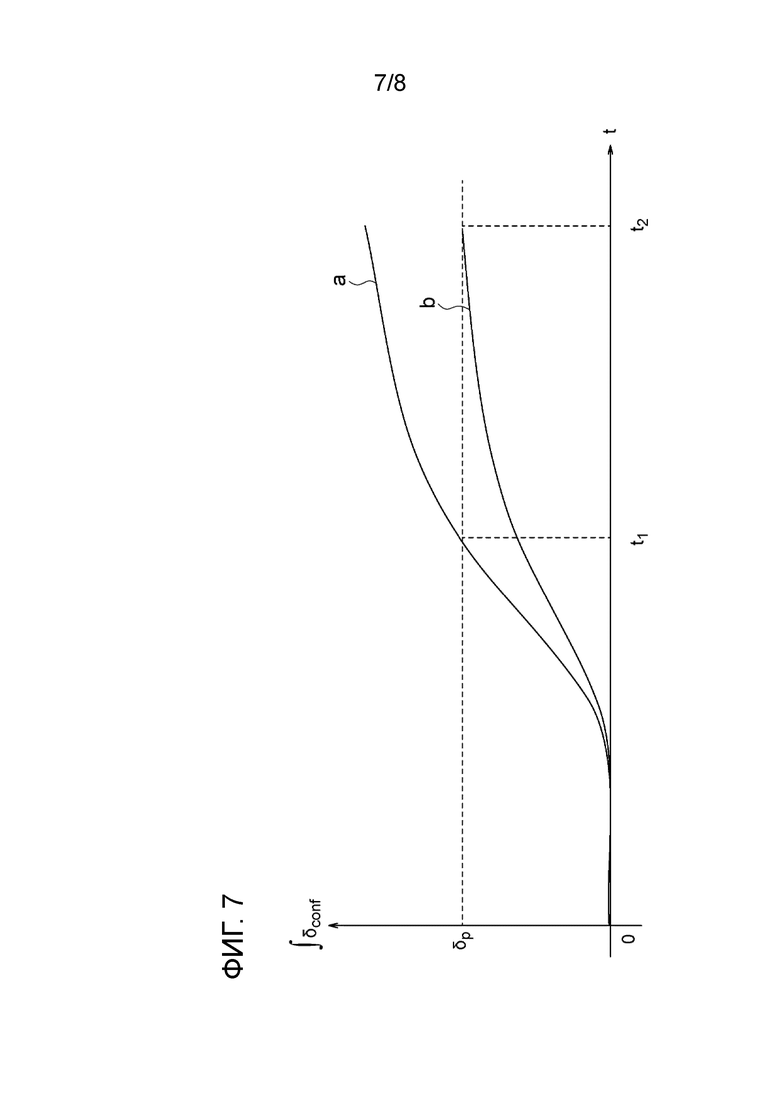
[0057] Фиг. 7 является графиком, иллюстрирующим характеристики величины руления. Графики a и b представляют характеристики, когда явление притяжения возникает, и управление выполняется для того, чтобы не допускать притягивания к крупногабаритному автомобилю. График a представляет характеристику, когда интегральное усиление (ki) для увеличения задается равным увеличенному усилению, в то время как график b представляет характеристику, когда интегральное усиление (ki) для увеличения задается равным обычному усилению, в отличие от одного или более вариантов осуществления настоящего изобретения. Горизонтальная ось представляет время (t). Вертикальная ось представляет крутящий момент поворота при рулении; δp представляет собой величину руления, когда рассматриваемое транспортное средство 40 притягивается к другому транспортному средству 50.
[0058] Как проиллюстрировано на графике a, когда интегральное усиление (ki) для увеличения задается равным увеличенному усилению, величина руления (соответствующая интегрированному значению величины (δconf) управления рулением) для предоставления величины руления становится больше величины (δp) руления во время (t1). С другой стороны, когда интегральное усиление (ki) для увеличения задается равным обычному усилению, величина руления (соответствующая интегрированному значению величины (δconf) управления рулением) для предоставления величины руления становится больше величины (δp) руления во время (t2>t1). Таким образом, в одном или более вариантов осуществления настоящего изобретения, поскольку интегральное усиление (ki) для увеличения увеличивается, чтобы задавать отклик величины руления на ввод в модуль 1 рулевого управления выше отклика в обычные времена, время до тех пор, пока значение интеграла, включенного в передаточной функции выражения (1) не увеличивается, сокращается. Как результат, в одном или более вариантов осуществления настоящего изобретения, величина притяжения к крупногабаритному автомобилю может уменьшаться.
[0059] Оборудование 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения может применяться к системе помощи при вождении, такой как система недопущения выезда за пределы полосы движения (система удержания на полосе движения). Система недопущения выезда за пределы полосы движения обнаруживает полосу движения с использованием камеры и т.п. Когда рассматриваемое транспортное средство ведет себя таким образом, что оно выезжает за пределы обнаруженной полосы движения, система выполняет управление рулением таким образом, что рассматриваемое транспортное средство удерживается на текущей полосе движения. В частности, оборудование 100 управления транспортного средства вычисляет величину управления рулением для предоставления величины руления в соответствии с разностью (величиной сдвига) между текущей траекторией движения рассматриваемого транспортного средства и целевой траекторией и выводит значение команды управления в электромотор 12. Оборудование 100 управления транспортного средства выполняет управление восстановлением траектории движения рассматриваемого транспортного средства как целевой траектории посредством работы электромотора 12 в соответствии с величиной управления рулением, чтобы предоставлять величину руления в поперечном направлении относительно полосы движения рассматриваемого транспортного средства. Интегральное усиление (ki) для увеличения в этой операции представляет собой обычное усиление (соответствующее обычному управлению).
[0060] Оборудование 100 управления транспортного средства обнаруживает состояние впереди рассматриваемого транспортного средства с использованием изображения, захваченного посредством камеры 20, и определяет то, удовлетворяется или нет условие опережения. Когда условие опережения не удовлетворяется, оборудование 100 управления транспортного средства задает интегральное усиление (ki) для увеличения при управлении рулением равным обычному усилению. С другой стороны, когда условие опережения удовлетворяется, оборудование 100 управления транспортного средства задает интегральное усиление (ki) для увеличения равным увеличенному усилению. Оборудование 100 управления транспортного средства вычисляет величину управления рулением таким образом, что для величины сдвига между текущей траекторией движения рассматриваемого транспортного средства и целевой траекторией, абсолютная величина величины руления превышает абсолютную величину при обычном управлении. Таким образом, оборудование 100 управления транспортного средства задает отклик абсолютной величины для величины руления на величину сдвига выше отклика при обычном управлении. Через эту операцию, когда явление притяжения заставляет рассматриваемое транспортное средство вести себя таким образом, что оно выезжает за пределы полосы движения, управление рулением может выполняться за короткое время таким образом, что транспортное средство удерживается на текущей полосе движения.
[0061] Как описано выше, оборудование 100 управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения выполняет управление восстановлением траектории движения рассматриваемого транспортного средства как целевой траектории, в качестве обычного управления, посредством предоставления величины руления в поперечном направлении относительно полосы движения рассматриваемого транспортного средства, и использует данные обнаружения камеры 20, чтобы определять то, движется или нет крупногабаритный автомобиль в смежной полосе движения. Когда выполняется определение в отношении того, что крупногабаритный автомобиль движется в смежной полосе движения впереди рассматриваемого транспортного средства, отклик величины руления увеличивается до более высокого отклика, чем отклик при обычном управлении до того, как рассматриваемое транспортное средство опережает крупногабаритный автомобиль. Это обеспечивает возможность выполнения управления подавлением притяжения за короткое время.
[0062] В одном или более вариантов осуществления настоящего изобретения, когда крупногабаритный автомобиль движется в смежной полосе движения впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство движется на стороне ближе к крупногабаритному автомобилю относительно целевой траектории рассматриваемого транспортного средства, отклик крутящего момента поворота при рулении задается равным первому отклику, в то время как, когда крупногабаритный автомобиль движется в смежной полосе движения впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство движется на стороне, дальней от другого транспортного средства относительно целевой траектории, отклик крутящего момента поворота при рулении задается равным второму отклику. Первый отклик выше второго отклика. Первый отклик соответствует отклику, когда интегральное усиление (ki) для увеличения задается равным увеличенному усилению, и второй отклик соответствует отклику, когда интегральное усиление (ki) для увеличения задается равным обычному усилению.
[0063] В одном или более вариантов осуществления настоящего изобретения, последовательность операций управления по этапу 14 включает в себя сравнение величины (yd) сдвига с четвертым пороговым значением (yd_th) расстояния, чтобы определять то, находится или нет рассматриваемое транспортное средство ближе к стороне другого транспортного средства, чем центральная линия C полосы движения рассматриваемого транспортного средства (центральная линия C соответствует целевой траектории рассматриваемого транспортного средства). Когда величина (yd) сдвига превышает четвертое пороговое значение (yd_th) расстояния, рассматриваемое транспортное средство движется на стороне другого транспортного средства центральной линии C; в силу этого интегральное усиление (ki) для увеличения задается равным увеличенному усилению, и крутящий момент для крутящего момента поворота при рулении задается равным быстрому отклику. С другой стороны, когда величина (yd) сдвига меньше четвертого порогового значения (yd_th) расстояния, рассматриваемое транспортное средство движется на противоположной стороне центральной линии C по отношению к другому транспортному средству; в силу этого интегральное усиление (ki) для увеличения задается равным обычному усилению, и крутящий момент для крутящего момента поворота при рулении задается равным низкому отклику. Через эту операцию, когда рассматриваемое транспортное средство движется на противоположной стороне по отношению к крупногабаритному автомобилю на стороне, отклик крутящего момента поворота при рулении представляет собой обычный отклик таким образом, что некомфортное ощущение может уменьшаться, когда водитель рулит в противоположную сторону по отношению к крупногабаритному автомобилю.
[0064] В одном или более вариантов осуществления настоящего изобретения, величина (yd) поперечного сдвига между траекторией движения рассматриваемого транспортного средства и целевой траекторией вычисляется, и отклик величины руления увеличивается до более высокого отклика, чем отклик в обычные времена в соответствии с величиной (yd) сдвига. Это может повышать способность к придерживанию целевой траектории, когда рассматриваемое транспортное средство опережает крупногабаритный автомобиль. Кроме того, величина управления рулением может быстро изменяться для величины притяжения к крупногабаритному.
[0065] В одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство опережает крупногабаритный автомобиль, отклик величины руления восстанавливается как обычный отклик величины руления. Через эту операцию, отклик может восстанавливаться в момент времени, когда влияние посредством притяжения исчезает.
[0066] В одном или более вариантов осуществления настоящего изобретения, когда условие опережения удовлетворяется, интегральное усиление (ki) для увеличения задается равным увеличенному усилению, тогда как, когда условие опережения не удовлетворяется, интегральное усиление (ki) для увеличения задается равным обычному усилению. Это позволяет подавлять возникновение частой коррекции руления как целевой траектории при движении посредством обычной помощи при вождении.
[0067] В одном или более вариантов осуществления настоящего изобретения, значение интегрального усиления (ki) для увеличения может задаваться в соответствии с величиной сдвига. Например, устройство 30 управления увеличивает интегральное усиление (ki) для увеличения по мере того, как увеличивается величина (yd) сдвига. Это может повышать способность к придерживанию целевой траектории, когда рассматриваемое транспортное средство опережает крупногабаритный автомобиль.
[0068] В одном или более вариантов осуществления настоящего изобретения, определение в отношении того, опережает или нет рассматриваемое транспортное средство 40 другое транспортное средство 50, может выполняться не только с использованием истекшего времени (td) от момента, когда флаг опережения включается, но также и с использованием расстояния между транспортными средствами.
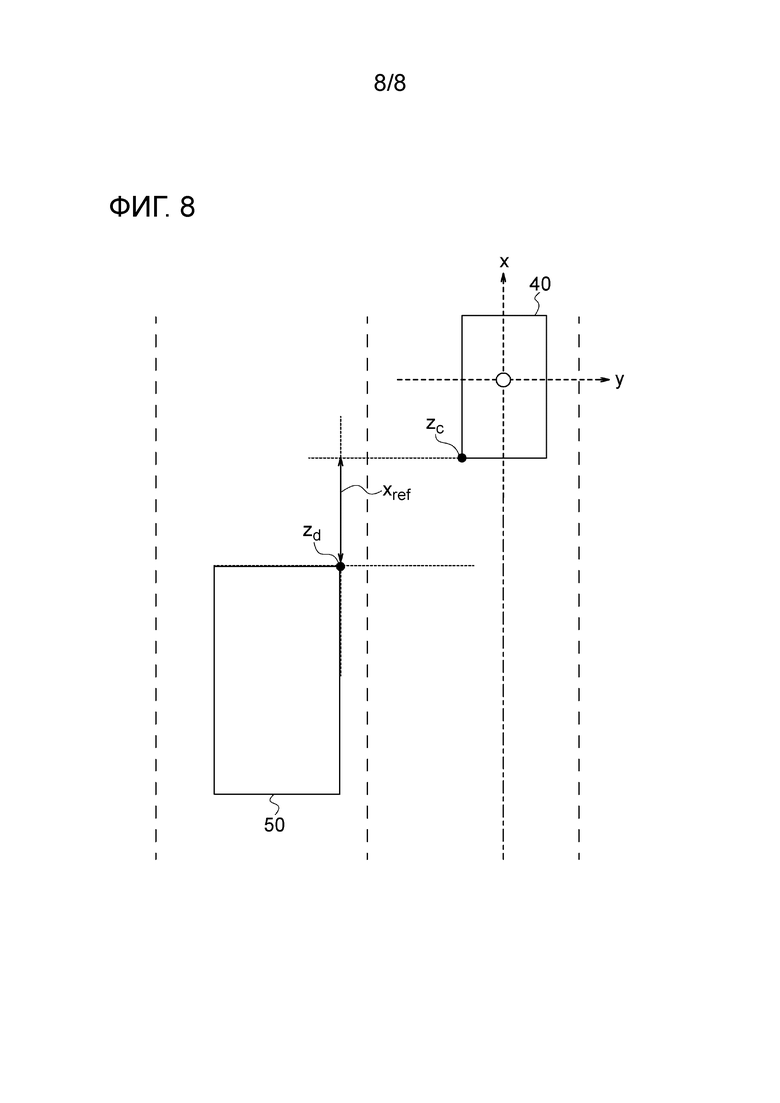
[0069] В дальнейшем описывается управление, при котором интегральное усиление (ki) для увеличения задается равным увеличенному усилению и затем восстанавливается как обычное усиление, со ссылкой на фиг. 8. Фиг. 8 является схемой, иллюстрирующей относительное положение между рассматриваемым транспортным средством и другим транспортным средством. Как проиллюстрировано на фиг. 8, рассматриваемое транспортное средство 40 опережает другое транспортное средство 50, и другое транспортное средство движется в смежной полосе движения позади рассматриваемого транспортного средства 40. Обозначение оси X, оси Y и центральной точки O является идентичным обозначениям на фиг. 4.
[0070] Устройство 30 управления указывает передний конец Zd другого транспортного средства 50 из изображения, захваченного посредством камеры 20. Передний конец Zd представляет собой вершину, ближайшую к рассматриваемому транспортному средству 40, из вершин в четырех углах, при просмотре другого транспортного средства 50 непосредственно сверху. Как проиллюстрировано на фиг. 8, когда другое транспортное средство 50 движется с левой стороны позади рассматриваемого транспортного средства 40, передний конец, Zd представляет собой точку, позиционированную в верхнем правом углу, при просмотре другого транспортного средства 50 непосредственно сверху. Устройство 30 управления также указывает задний конец Zc рассматриваемого транспортного средства. Zc заднего конца представляет собой вершину, ближайшую к другому транспортному средству 50, из вершин в четырех углах, при просмотре рассматриваемого транспортного средства 40 непосредственно сверху.
[0071] Устройство 30 управления вычисляет расстояние (xref) между транспортными средствами в направлении по оси Х и расстояние (yref) между транспортными средствами в направлении по оси Y. Устройство 30 управления сравнивает расстояние (xref) между транспортными средствами в направлении движения с пятым пороговым значением (xth_b) расстояния, чтобы определять то, превышает или нет расстояние (xref) между транспортными средствами пятое пороговое значение (xth_b) расстояния. Когда расстояние (xref) между транспортными средствами превышает пятое пороговое значение (xth_b) расстояния, устройство 30 управления определяет то, что рассматриваемое транспортное средство 40 опережает другое транспортное средство 50, и восстанавливает интегральное усиление (ki) для увеличения от увеличенного усиления до обычного усиления, чтобы за счет этого восстанавливать отклик величины руления до отклика в обычные времена. С другой стороны, когда расстояние (xref) между транспортными средствами не превышает пятое пороговое значение (xth_b) расстояния, устройство 30 управления определяет то, что рассматриваемое транспортное средство 40 не опережает другое транспортное средство 50, и поддерживает интегральное усиление (ki) для увеличения равным увеличенному усилению.
[0072] Один или более вариантов осуществления настоящего изобретения не ограничены предоставлением величины руления для управления электромотором 12, при котором противоположный крутящий момент выводится в крутящий момент поворота при рулении, вызываемый посредством возмущений. Помимо этого или альтернативно, электромотор 12 может управляться таким образом, что крутящий момент поворота при рулении, вызываемый посредством возмущений, и крутящий момент посредством предоставленной величины руления компенсируют друг друга, т.е. таким образом, что крутящий момент посредством предоставленной величины руления суммируется с крутящим моментом поворота при рулении, вызываемым посредством возмущений, чтобы за счет этого уменьшать крутящий момент поворота при рулении, вызываемый посредством возмущений.
[0073] В одном или более вариантов осуществления настоящего изобретения, определение в отношении того, опережает или нет рассматриваемое транспортное средство 40 другое транспортное средство 50, может выполняться с использованием камеры заднего вида, бокового радара, сонара и т.п., установленных в задней части рассматриваемого транспортного средства.
[0074] В одном или более вариантов осуществления настоящего изобретения, ввод отклика величины руления может задаваться не только посредством операции руления водителя, но также и посредством команды управления в системе автоматизированного или автономного вождения. Таким образом, когда транспортное средство движется посредством автоматизированного или автономного вождения, и рассматриваемое транспортное средство опережает крупногабаритный автомобиль в смежной полосе движения, отклик величины руления может задаваться посредством системы управления транспортного средства согласно одному или более вариантов осуществления настоящего изобретения. Через эту операцию, необязательно определять крутящий момент, вводимый водителем в руль 2, и в силу этого управление подавлением притяжения может выполняться за короткое время, даже когда крутящий момент, вводимый водителем в руль 2, является чрезвычайно небольшим, либо даже в транспортном средстве с поддержкой автоматизированного или автономного вождения, в котором отсутствует крутящий момент, вводимый водителем в руль 2.
Описание позиционных обозначений
[0075] 1 - модуль рулевого управления
2 - руль
3, 4 - колесо
11 - вал
12 - электромотор
13 - датчик угла поворота при рулении
14 - датчик крутящего момента
20 - камера
30 - устройство управления
40 - рассматриваемое транспортное средство
50 - другое транспортное средство
60 - модуль определения
100 - оборудование управления транспортного средства
1000 - система управления транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
Изобретение относится к способу управления транспортным средством и к оборудованию управления транспортного средства. Оборудование управления транспортного средства включает в себя: датчик, выполненный с возможностью обнаруживать состояние за пределами рассматриваемого транспортного средства, и устройство управления. Устройство управление выполнено: восстанавливать траекторию движения рассматриваемого транспортного средства, посредством предоставления величины руления относительно полосы движения рассматриваемого транспортного средства. Данные обнаружения датчика позволяют определять движется или нет другое транспортное средство в смежной полосе движения. При определении движения другое транспортное средство смежной полосе впереди рассматриваемого транспортного средства, отклик величины руления увеличивается до более высокого отклика, чем отклик при обычном управлении, до того, как рассматриваемое транспортное средство опередит другое транспортное средство. Повышается безопасность при эксплуатации. 3 н. и 2 з.п. ф-лы, 8 ил.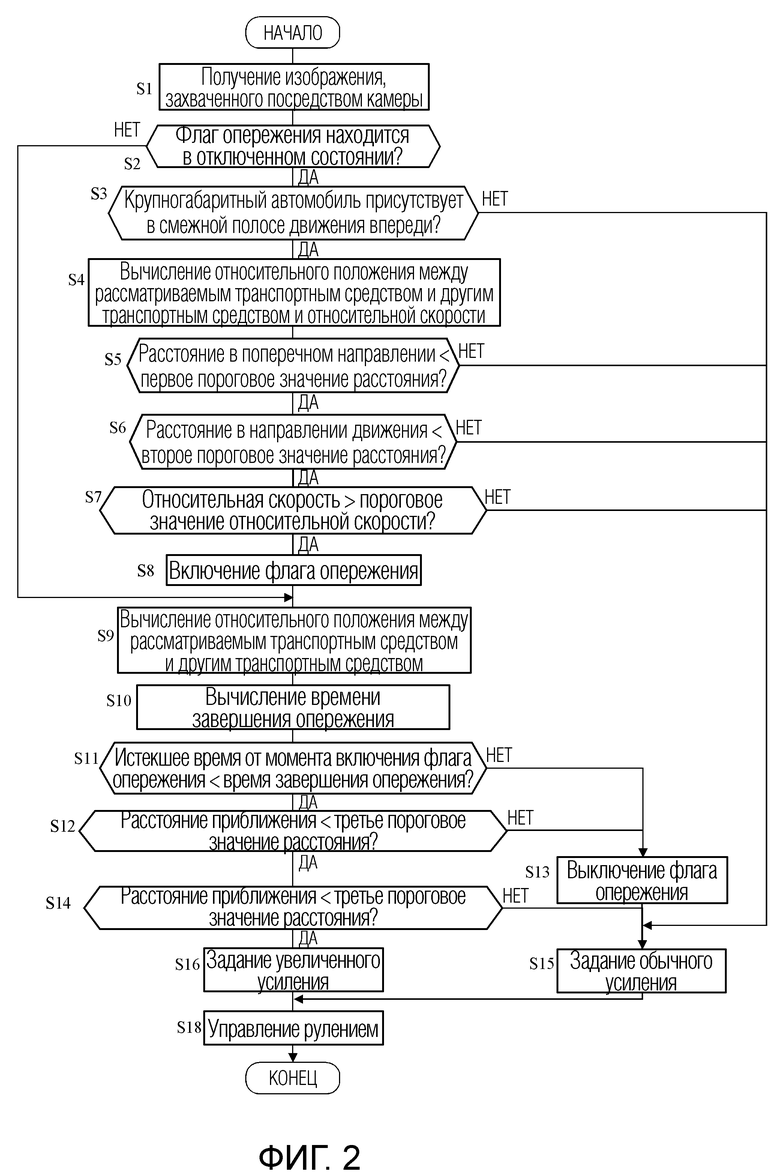
1. Способ управления транспортным средством для управления транспортным средством с использованием оборудования управления транспортного средства, которое включает в себя датчик для обнаружения состояния впереди рассматриваемого транспортного средства и устройство управления, при этом способ управления транспортным средством содержит этапы, на которых:
выполняют управление восстановлением траектории движения рассматриваемого транспортного средства как целевой траектории, в качестве обычного управления, посредством предоставления величины руления в поперечном направлении относительно полосы движения рассматриваемого транспортного средства;
используют данные обнаружения датчика для того, чтобы определять то, движется или нет другое транспортное средство в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства; и
при определении того, что другое транспортное средство движется в смежной полосе движения впереди рассматриваемого транспортного средства, увеличивают отклик величины руления до более высокого отклика, чем отклик при обычном управлении, до того, как рассматриваемое транспортное средство опережает другое транспортное средство.
2. Способ управления транспортным средством по п. 1, содержащий этапы, на которых:
когда другое транспортное средство движется в смежной полосе движения впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство движется на стороне ближе к другому транспортному средству относительно целевой траектории, задают отклик крутящего момента поворота при рулении равным первому отклику; и
когда другое транспортное средство движется в смежной полосе движения впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство движется на стороне, дальней от другого транспортного средства относительно целевой траектории, задают отклик крутящего момента поворота при рулении равным второму отклику,
причем первый отклик выше второго отклика.
3. Способ управления транспортным средством по п. 1 или 2, содержащий этапы, на которых:
вычисляют величину сдвига между траекторией движения и целевой траекторией в поперечном направлении; и
увеличивают отклик величины руления до более высокого отклика, чем отклик при обычном управлении, в соответствии с величиной сдвига.
4. Способ управления транспортным средством по п. 1 или 2, содержащий этап, на котором:
когда рассматриваемое транспортное средство опережает другое транспортное средство, восстанавливают отклик величины руления до отклика величины руления при обычном управлении.
5. Оборудование управления транспортного средства, содержащее:
датчик, который обнаруживает состояние впереди рассматриваемого транспортного средства;
исполнительное устройство, которое предоставляет величину руления в поперечном направлении относительно полосы движения рассматриваемого транспортного средства; и
устройство управления, которое управляет исполнительным устройством, при этом
устройство управления:
вычисляет величину руления управления для исполнительного устройства, чтобы формировать величину руления в соответствии с величиной сдвига в поперечном направлении относительно полосы движения рассматриваемого транспортного средства;
выполняет управление восстановлением траектории движения рассматриваемого транспортного средства как целевой траектории, в качестве обычного управления, посредством управления исполнительным устройством в соответствии с величиной руления управления;
использует данные обнаружения датчика для того, чтобы определять то, движется или нет другое транспортное средство в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства; и
при определении того, что другое транспортное средство движется в смежной полосе движения впереди рассматриваемого транспортного средства, увеличивает отклик величины руления до более высокого отклика, чем отклик при обычном управлении, до того, как рассматриваемое транспортное средство опережает другое транспортное средство.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ КОНТРОЛЯ "СЛЕПОЙ ЗОНЫ" БОКОВЫХ ЗЕРКАЛ ДВИЖУЩЕГОСЯ ВПЕРЕДИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2542835C1 |

