ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству управления рулением.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 раскрывает устройство управления рулением для помощи рулению водителем, когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки полосы движения, которая распознана на основе изображения бортовой камеры, посредством поворота поворотного колеса в направлении, которое должно перемещать рассматриваемое транспортное средство в направлении от сигнальной линии дорожной разметки.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2011-051570
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, КОТОРЫЕ ДОЛЖНЫ БЫТЬ РЕШЕНЫ ИЗОБРЕТЕНИЕМ
[0004] В традиционной технологии, описанной выше, когда другая из левой и правой сигнальных линий дорожной разметки (та, которая находится дальше от рассматриваемого транспортного средства) становится необнаруживаемой во время реализации управления, чтобы помогать рулению водителем, непрерывное управление не становится невозможным немедленно, поскольку величина управления для управления для помощи рулению водителем основана на взаимосвязи с либо левой, либо правой сигнальными линиями дорожной разметки; тем не менее, поскольку, возможно, рассматриваемое транспортное средство затем приближается к другой из левой и правой сигнальных линий дорожной разметки, прерывание управления для помощи рулению водителем необходимо даже в случае, если сигнальная линия дорожной разметки дальше от рассматриваемого транспортного средства становится необнаруживаемой.
Здесь, если управление просто прерывается, то сила реакции при рулении будет противоположной силе, которую ожидает водитель, поскольку водитель выполняет руление при допущении изменения силы реакции при рулении, сформированной посредством управления, что вызывает дискомфорт у водителя.
Цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления рулением, которое допускает уменьшение этого дискомфорта, вызываемого у водителя.
СРЕДСТВО ДЛЯ РАЗРЕШЕНИЯ ВЫШЕУПОМЯНУТЫХ ПРОБЛЕМ
[0005] Когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки, вычисляется сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, которая увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки; при приложении силы реакции при рулении к модулю рулевого управления, который принимает ввод руления от водителя на основе силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, если выполняется определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки становится равным или меньше предварительно определенного градиента увеличения, сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки ограничивается.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006] Таким образом, посредством введения предела на силу реакции при рулении для подавления приближения к сигнальной линии дорожной разметки в момент времени, когда прекращается тенденция роста величины поворота для подавления приближения к сигнальной линии дорожной разметки, становится возможным подавление отклонения силы реакции при рулении от ожидания водителя, и может уменьшаться дискомфорт, вызываемый у водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является системным видом, иллюстрирующим систему рулевого управления транспортного средства первого варианта осуществления.
Фиг. 2 является блок-схемой управления модуля 19 управления при повороте.
Фиг. 3 является блок-схемой управления модуля 20 управления силой реакции при рулении.
Фиг. 4 является блок-схемой управления модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Фиг. 5 является блок-схемой управления модуля 37 вычисления силы отталкивания, соответствующей углу относительно вертикальной оси.
Фиг. 6 является блок-схемой управления модуля 38 вычисления силы отталкивания, соответствующей поперечной позиции.
Фиг. 7 является видом, иллюстрирующим область управления F/B-управления углом относительно вертикальной оси и F/B-управления поперечной позицией.
Фиг. 8 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает прерывистый боковой ветер.
Фиг. 9 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда F/B-управление поперечной позицией не выполняется, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает постоянный боковой ветер.
Фиг. 10 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда F/B-управление поперечной позицией выполняется, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает постоянный боковой ветер.
Фиг. 11 является блок-схемой управления модуля 34 вычисления смещения поперечной силы.
Фиг. 12 является видом, иллюстрирующим состояние, в котором характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, смещается в направлении, идентичном направлению стабилизирующего крутящего момента.
Фиг. 13 является характерным видом, иллюстрирующим взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителем.
Фиг. 14 является видом, иллюстрирующим состояние, в котором характеристика, иллюстрирующая взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителем, изменена посредством смещения характеристики силы реакции при рулении, представляющей крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, в направлении, идентичном направлению стабилизирующего крутящего момента.
Фиг. 15 является блок-схемой управления модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
Фиг. 16 является блок-схемой управления модуля 39 вычисления силы реакции, соответствующего допустимому времени отклонения.
Фиг. 17 является блок-схемой управления модуля 40 вычисления силы реакции, соответствующего поперечной позиции.
Фиг. 18 является видом, иллюстрирующим состояние, в котором характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, смещается в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении становится большим.
Фиг. 19 является характерным видом, иллюстрирующим взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителем.
Фиг. 20 является видом, иллюстрирующим состояние, в котором характеристика, иллюстрирующая взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителем, изменена посредством смещения характеристики силы реакции при рулении, представляющей крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении становится большим.
Фиг. 21 является системным видом, иллюстрирующим систему рулевого управления транспортного средства второго варианта осуществления.
Фиг. 22 является блок-схемой управления модуля 28 управления вспомогательным крутящим моментом.
Фиг. 23 является блок-схемой управления модуля 42 вычисления смещения вспомогательного крутящего момента.
Фиг. 24 является видом, иллюстрирующим состояние, в котором характеристика вспомогательного крутящего момента, представляющая вспомогательный крутящий момент, соответствующий крутящему моменту поворота при рулении, смещается в направлении, в котором абсолютное значение вспомогательного крутящего момента становится меньшим.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0008] 1 - модуль рулевого управления
2 - поворотный модуль
3 - резервная муфта
4 - SBW-контроллер
5FL, 5FR - левое и правое передние колеса
6 - руль
7 - вал рулевой колонки
8 - электромотор обеспечения силы реакции
9 - датчик угла поворота при рулении
11 - вал шестерни
12 - рулевая передача
13 - поворотный электромотор
14 - датчик угла поворота
15 - шестерня зубчатой рейки
16 - зубчатая рейка
17 - камера
18 - датчик скорости транспортного средства
19 - модуль управления при повороте
19a - сумматор
20 - модуль управления силой реакции при рулении
20a - модуль вычитания
20b - сумматор
20c - сумматор
21 - процессор изображений
22 - формирователь сигналов управления электрического тока
23 - формирователь сигналов управления электрического тока
24 - навигационная система
25 - EPS-контроллер
26 - датчик крутящего момента
27 - электромотор усилителя рулевого управления
28 - модуль управления вспомогательным крутящим моментом
28a - модуль вычитания
29 - формирователь сигналов управления электрического тока
31 - модуль вычисления задаваемого угла поворота
32 - модуль вычисления задаваемого угла поворота для подавления внешних возмущений
32a - модуль вычисления угла относительно вертикальной оси
32b - модуль вычисления кривизны
32c - модуль вычисления поперечной позиции
32d - сумматор
32e - модуль вычисления целевого момента относительно вертикальной оси
32f - модуль вычисления целевого углового ускорения относительно вертикальной оси
32g - модуль вычисления целевой скорости относительно вертикальной оси
32h - модуль вычисления задаваемого угла поворота
32i - процессор задания ограничений
33 - модуль вычисления поперечной силы
34 - модуль вычисления смещения поперечной силы
34a - модуль вычисления кривизны
34b - модуль верхнего и нижнего ограничения
34c - модуль вычисления SAT-усиления
34d - умножитель
34e - процессор задания ограничений
35 - модуль вычисления SAT
36 - модуль вычисления смещения крутящего момента силы реакции при рулении
36a - модуль вычисления угла относительно вертикальной оси
36b - модуль вычисления поперечной позиции
36c - модуль выбора силы реакции
36d - процессор задания ограничений
37 - модуль вычисления силы отталкивания, соответствующей углу относительно вертикальной оси
37a - модуль верхнего и нижнего ограничения
37b - модуль умножения F/B-усиления угла относительно вертикальной оси
37c - модуль умножения корректирующего усиления скорости транспортного средства
37d - модуль умножения корректирующего усиления кривизны
37e - умножитель
38 - модуль вычисления силы отталкивания, соответствующей поперечной позиции
38a - модуль вычитания
38b - модуль верхнего и нижнего ограничения
38c - модуль умножения корректирующего усиления расстояния
38d - модуль умножения F/B-усиления поперечной позиции
38e - модуль умножения корректирующего усиления скорости транспортного средства
38f - модуль умножения корректирующего усиления кривизны
38g - умножитель
39 - модуль вычисления силы реакции, соответствующий допустимому времени отклонения
39a - умножитель
39b - делитель
39c - делитель
39d - модуль выбора допустимого времени отклонения
39e - модуль вычисления силы реакции, соответствующий допустимому времени отклонения
40 - модуль вычисления силы реакции, соответствующий поперечной позиции
40a - модуль вычитания
40b - модуль вычитания
40c - модуль выбора отклонения поперечной позиции
40d - модуль вычисления силы реакции, соответствующий отклонению поперечной позиции
41 - модуль вычисления вспомогательного крутящего момента
42 - модуль вычисления смещения вспомогательного крутящего момента
42c - модуль выбора силы реакции
43 - модуль подавления управления смещением силы реакции
43a - счетчик
43b - модуль ограничения величины смещения крутящего момента силы реакции при рулении
44 - модуль подавления управления смещением вспомогательного крутящего момента
44a - счетчик
44b - модуль ограничения величины смещения вспомогательного крутящего момента
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
КОНФИГУРАЦИЯ СИСТЕМЫ
ФИГ. 1 является системным видом, иллюстрирующим систему рулевого управления транспортного средства первого варианта осуществления.
Устройство рулевого управления первого варианта осуществления, главным образом, сконфигурировано посредством модуля 1 рулевого управления, поворотного модуля 2, резервной муфты 3 и SBW-контроллера 4, и устройство использует систему рулевого управления по проводам (SBW), в которой модуль 1 рулевого управления, который принимает ввод руления от водителя, и поворотный модуль 2, который поворачивает левое и правое переднее колесо 5FL, 5FR (поворотные колеса), механически отделены.
[0010] Модуль 1 рулевого управления содержит руль 6, вал 7 рулевой колонки, электромотор 8 обеспечения силы реакции и датчик 9 угла поворота при рулении.
Вал 7 рулевой колонки вращается неразъемно с рулем 6.
Электромотор 8 обеспечения силы реакции, например, представляет собой бесщеточный электромотор, и коаксиальный электромотор, в котором выходной вал является коаксиальным с валом 7 рулевой колонки, выводит крутящий момент силы реакции при рулении на вал 7 рулевой колонки в ответ на команду из SBW-контроллера 4.
Датчик 9 угла поворота при рулении обнаруживает абсолютный угол поворота вала 7 рулевой колонки, т.е. угол поворота руля 6 при рулении.
[0011] Поворотный модуль 2 содержит вал 11 шестерни, рулевую передачу 12, поворотный электромотор 13 и датчик 14 угла поворота.
Рулевая передача 12 представляет собой рулевую передачу с механизмом реечной передачи, которая поворачивает передние колеса 5L, 5R в ответ на вращение вала 11 шестерни.
Поворотный электромотор 13, например, представляет собой бесщеточный электромотор, в котором выходной вал соединяется с шестерней 15 зубчатой рейки через непроиллюстрированный замедлитель, и этот электромотор выводит крутящий момент поворота для поворота переднего колеса 5 в зубчатую рейку 16 в ответ на команду из SBW-контроллера 4.
Датчик 14 угла поворота обнаруживает абсолютный угол поворота поворотного электромотора 13. Поскольку всегда возникает единственным образом определенная корреляция между углом поворота поворотного электромотора 13 и углом поворота переднего колеса 5, угол поворота переднего колеса 5 может обнаруживаться на основе угла поворота поворотного электромотора 13. В данном документе, если прямо не описано, угол поворота переднего колеса 5 должен представлять собой угол, который вычисляется на основе угла поворота поворотного электромотора 13.
Резервная муфта 3 предоставляется между валом 7 рулевой колонки модуля 1 рулевого управления и валом 11 шестерни поворотного модуля 2, и модуль 1 рулевого управления и поворотный модуль 2 отсоединяются посредством расцепления; модуль 1 рулевого управления и поворотный модуль 2 механически соединяются посредством их прикрепления.
[0012] Скорость транспортного средства (скорость кузова транспортного средства), определяемая посредством изображения проезжей дороги впереди рассматриваемого транспортного средства, захваченного посредством камеры 17 и датчика 18 скорости транспортного средства, в дополнение к датчику 9 угла поворота при рулении и датчику 14 угла поворота, описанным выше, вводится в SBW-контроллер 4.
SBW-контроллер 4 содержит модуль 19 управления при повороте для управления углом поворота передних колес 5FL, 5FR, модуль 20 управления силой реакции при рулении для управления крутящим моментом силы реакции при рулении, приложенным к валу 7 рулевой колонки, и процессор 21 изображений.
Модуль 19 управления при повороте формирует задаваемый угол поворота на основе каждого фрагмента входной информации и выводит сформированный задаваемый угол поворота в формирователь 22 сигналов управления электрического тока.
Формирователь 22 сигналов управления электрического тока управляет задаваемым электрическим током в поворотный электромотор 13 посредством обратной связи по углу для сопоставления фактического угла поворота, определенного посредством датчика 14 угла поворота, с задаваемым углом поворота.
Модуль 20 управления силой реакции при рулении формирует задаваемый крутящий момент силы реакции при рулении на основе каждого фрагмента входной информации и выводит сформированный задаваемый крутящий момент силы реакции при рулении в формирователь 23 сигналов управления электрического тока.
Формирователь 23 сигналов управления электрического тока управляет задаваемым электрическим током в электромотор 8 обеспечения силы реакции посредством обратной связи по крутящему моменту для сопоставления фактического крутящего момента силы реакции при рулении, который логически выводится из значения тока электромотора 8 обеспечения силы реакции, с задаваемым крутящим моментом силы реакции при рулении.
Процессор 21 изображений распознает левую и правую сигнальные линии дорожной разметки полосы движения (разделительные линии проезжаемого пути) посредством обработки изображений, к примеру, посредством извлечения краев из изображения проезжаемого пути впереди рассматриваемого транспортного средства, захваченного посредством камеры 17.
Помимо этого, когда SBW-система выходит из строя, SBW-контроллер 4 закрепляет резервную муфту 3 и механически соединяет модуль 1 рулевого управления и поворотный модуль 2, обеспечивая возможность перемещения зубчатой рейки 16 в осевом направлении посредством поворачивания руля 6. В это время, может выполняться управление, соответствующее системе электрического усилителя рулевого управления, для повышения силы поворота при рулении водителем посредством вспомогательного крутящего момента поворотного электромотора 13.
SBW-система, описанная выше, может представлять собой резервную систему, содержащую множество экземпляров каждого датчика, каждого контроллера и каждого электромотора. Кроме того, модуль 19 управления при повороте и модуль 20 управления силой реакции при рулении могут быть отдельными элементами управления.
[0013] В первом варианте осуществления, управление устойчивостью и управление уменьшением величины корректирующего руления выполняются с целью уменьшения величины корректирующего руления и уменьшения нагрузки по рулению на водителя.
Управление устойчивостью направлено на повышение уровня безопасности транспортного средства относительно возмущений (бокового ветра, неровных поверхностей дороги, выбоин, отклонений от прямой поверхности дороги и т.д.) и выполняет два вида управления с обратной связью (F/B).
1. F/B-УПРАВЛЕНИЕ УГЛОМ ОТНОСИТЕЛЬНО ВЕРТИКАЛЬНОЙ ОСИ
Угол относительно вертикальной оси, сформированный посредством возмущений, уменьшается посредством коррекции угла поворота в соответствии с углом относительно вертикальной оси, который представляет собой угол между сигнальной линией дорожной разметки и направлением движения рассматриваемого транспортного средства.
2. F/B-УПРАВЛЕНИЕ ПОПЕРЕЧНОЙ ПОЗИЦИЕЙ
Изменение поперечной позиции, которое является интегрированным значением углов относительно вертикальной оси, сформированных посредством возмущений, уменьшается посредством коррекции угла поворота в соответствии с расстоянием до сигнальной линии дорожной разметки (поперечной позицией).
[0014] Управление уменьшением величины корректирующего руления направлено на повышение уровня безопасности транспортного средства относительно ввода руления от водителя и выполняет три вида управления смещением силы реакции.
1. УПРАВЛЕНИЕ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕЕ ПОПЕРЕЧНОЙ ПОЗИЦИИ
Характеристика силы реакции при рулении, соответствующая стабилизирующему крутящему моменту, смещается в направлении, в котором абсолютное значение силы реакции при рулении становится большим в соответствии с поперечной позицией, чтобы подавлять изменение знака крутящего момента поворота при рулении на противоположный, когда водитель выполняет корректирующее руление, которое переходит нейтральную позицию угла поворота при рулении.
2. УПРАВЛЕНИЕ СМЕЩЕНИЕМ РЕАКЦИИ, СООТВЕТСТВУЮЩЕЕ ДОПУСТИМОМУ ВРЕМЕНИ ОТКЛОНЕНИЯ
Характеристика силы реакции при рулении, соответствующая стабилизирующему крутящему моменту, смещается в направлении, в котором абсолютное значение силы реакции при рулении становится большим в соответствии с допустимым временем отклонения (временем, требуемым для того, чтобы достигать сигнальной линии дорожной разметки), чтобы подавлять изменение знака крутящего момента поворота при рулении на противоположный, когда водитель выполняет корректирующее руление, которое переходит нейтральную позицию угла поворота при рулении.
3. УПРАВЛЕНИЕ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕЕ КРИВИЗНЕ
Характеристика силы реакции при рулении, соответствующая стабилизирующему крутящему моменту, смещается в направлении кодирования, идентичном направлению стабилизирующего крутящего момента в соответствии с кривизной сигнальной линии дорожной разметки, чтобы уменьшать силу удержания руления водителя и подавлять изменение угла удержания руления относительно изменения силы удержания руления при повороте.
[0015] МОДУЛЬ УПРАВЛЕНИЯ ПРИ ПОВОРОТЕ
ФИГ. 2 является блок-схемой управления модуля 19 управления при повороте.
Модуль 31 вычисления задаваемого SBW-угла поворота вычисляет задаваемый SBW-угол поворота на основе угла поворота при рулении и скорости транспортного средства.
Модуль 32 вычисления задаваемого угла поворота для подавления внешних возмущений вычисляет задаваемый угол поворота для подавления внешних возмущений для коррекции задаваемого SBW-угла поворота во время управления устойчивостью, на основе скорости транспортного средства и данных сигнальной линии дорожной разметки. Ниже описываются подробности модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Сумматор 19a суммирует задаваемый SBW-угол поворота и задаваемый угол поворота для подавления внешних возмущений и выводит полученное значение в формирователь 22 сигналов управления электрического тока в качестве конечного задаваемого угла поворота.
[0016] МОДУЛЬ УПРАВЛЕНИЯ СИЛОЙ РЕАКЦИИ ПРИ РУЛЕНИИ
ФИГ. 3 является блок-схемой управления модуля 20 управления силой реакции при рулении.
Модуль 33 вычисления поперечной силы вычисляет поперечную силу на шинах посредством обращения к карте преобразования угла поворота при рулении и поперечной силы, представляющей взаимосвязь между углом поворота при рулении и поперечной силой на шинах, согласно скорости транспортного средства в традиционном устройстве рулевого управления, которая получена посредством экспериментирования или другого средства заранее, на основе угла поворота при рулении и скорости транспортного средства. Карта преобразования угла поворота при рулении и поперечной силы имеет характеристику, при которой поперечная сила на шинах увеличивается по мере того, как возрастает угол поворота при рулении; величина изменения поперечной силы на шинах относительно величины изменения угла поворота при рулении больше, когда угол поворота при рулении является небольшим, по сравнению со случаем, когда он является большим; и поперечная сила на шинах становится меньшей по мере того, как возрастает скорость транспортного средства.
Модуль 34 вычисления смещения поперечной силы вычисляет величину смещения поперечной силы для смещения характеристики силы реакции при рулении при управлении смещением силы реакции, соответствующем кривизне, на основе скорости транспортного средства и данных сигнальной линии дорожной разметки. Ниже описываются подробности модуля 34 вычисления смещения поперечной силы.
Модуль 20a вычитания вычитает величину смещения поперечной силы из поперечной силы на шинах.
Модуль 35 вычисления SAT вычисляет крутящий момент силы реакции при рулении, который формируется посредством поперечной силы на шинах, посредством обращения к карте преобразования крутящего момента силы реакции при рулении и поперечной силы, представляющей взаимосвязь между поперечной силой на шинах и крутящим моментом силы реакции при рулении в традиционном устройстве рулевого управления, полученным посредством экспериментирования или другого средства заранее, на основе скорости транспортного средства и поперечной силы на шинах после смещения посредством величины смещения поперечной силы. Карта преобразования поперечной силы на шинах и крутящего момента силы реакции при рулении имеет характеристику, при которой крутящий момент силы реакции при рулении больше по мере того, как возрастает поперечная сила на шинах; величина изменения крутящего момента силы реакции при рулении относительно величины изменения поперечной силы на шинах больше, когда поперечная сила на шинах является небольшой, по сравнению со случаем, когда она является большой; и крутящий момент силы реакции при рулении становится меньшим по мере того, как возрастает скорость транспортного средства. Эта характеристика моделирует силу реакции, которая формируется на руле посредством стабилизирующего крутящего момента колес, пытающихся возвращаться в прямое состояние, который формируется посредством силы реакции поверхности дороги в традиционном устройстве рулевого управления.
Сумматор 20b суммирует компонент крутящего момента силы реакции при рулении (пружинный элемент, элемент вязкости, инерционный элемент), соответствующий крутящему моменту силы реакции при рулении, и характеристику руления. Пружинный элемент представляет собой компонент, который является пропорциональным углу поворота при рулении, и вычисляется посредством умножения предварительно определенного усиления и угла поворота при рулении. Элемент вязкости представляет собой компонент, пропорциональный угловой скорости руления, и вычисляется посредством умножения предварительно определенного усиления и угловой скорости руления. Инерционный элемент представляет собой компонент, который является пропорциональным угловому ускорению руления, и вычисляется посредством умножения предварительно определенного усиления и углового ускорения руления.
Модуль 36 вычисления смещения крутящего момента силы реакции при рулении вычисляет величину смещения крутящего момента силы реакции при рулении для смещения характеристики силы реакции при рулении при управлении смещением силы реакции, соответствующем поперечной позиции или допустимому времени отклонения, на основе скорости транспортного средства и изображения проезжаемого пути впереди рассматриваемого транспортного средства. Ниже описываются подробности модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
[0017] Модуль 43 подавления управления смещением силы реакции содержит счетчик 43a и модуль 43b ограничения величины смещения крутящего момента силы реакции при рулении.
Когда сигнальная линия дорожной разметки дальше от рассматриваемого транспортного средства из левой и правой сигнальных линий дорожной разметки становится необнаруживаемой, счетчик 43a начинает подсчет; когда значение счетчика достигает порогового значения, сбрасывается значение счетчика (=0), и задается флаг подавления управления смещением силы реакции (=1). Флаг подавления управления смещением силы реакции сбрасывается (=0), когда сигнальная линия дорожной разметки становится необнаруживаемой.
Модуль 43b ограничения величины смещения крутящего момента силы реакции при рулении начинает операцию подавления управления смещением силы реакции, когда задается флаг подавления управления смещением силы реакции, и величина смещения крутящего момента силы реакции при рулении ниже предыдущего значения. При операции подавления управления смещением силы реакции ограничена величина смещения крутящего момента силы реакции при рулении. В частности, когда величина смещения крутящего момента силы реакции при рулении превышает предыдущее значение, предыдущее значение выводится в качестве величины смещения крутящего момента силы реакции при рулении, и текущее значение выводится, когда оно равно или больше предыдущего значения.
Сумматор 20c выводит значение, полученное посредством суммирования крутящего момента силы реакции при рулении после суммирования компонента крутящего момента силы реакции при рулении, соответствующего характеристике руления, и величины смещения крутящего момента поворота при рулении, в формирователь 23 сигналов управления электрического тока в качестве конечного задаваемого крутящего момента силы реакции при рулении.
[0018] МОДУЛЬ ВЫЧИСЛЕНИЯ ЗАДАВАЕМОГО УГЛА ПОВОРОТА ДЛЯ ПОДАВЛЕНИЯ ВНЕШНИХ ВОЗМУЩЕНИЙ
ФИГ. 4 является блок-схемой управления модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Модуль 32a вычисления угла относительно вертикальной оси вычисляет угол относительно вертикальной оси, который представляет собой угол между сигнальной линией дорожной разметки в расположенной впереди фиксированной точке и направлением движения рассматриваемого транспортного средства. Угол относительно вертикальной оси в расположенной впереди фиксированной точке должен представлять собой угол, сформированный между сигнальной линией дорожной разметки после предварительно определенного времени (например, 0,5 секунды) и направлением движения рассматриваемого транспортного средства. Угол относительно вертикальной оси может быть легко и точно обнаружен посредством вычисления угла относительно вертикальной оси на основе изображения проезжаемого пути, захваченного посредством камеры 17.
Модуль 32b вычисления кривизны вычисляет кривизну сигнальной линии дорожной разметки в расположенной впереди фиксированной точке.
Модуль 32c вычисления поперечной позиции вычисляет расстояние до сигнальной линии дорожной разметки в расположенной впереди фиксированной точке.
Модуль 37 вычисления силы отталкивания, соответствующей углу относительно вертикальной оси, вычисляет силу отталкивания транспортного средства для уменьшения угла относительно вертикальной оси, который формируется посредством возмущений при F/B-управлении углом относительно вертикальной оси, на основе угла относительно вертикальной оси, кривизны и скорости транспортного средства. Ниже описываются подробности модуля 37 вычисления силы отталкивания, соответствующей углу относительно вертикальной оси.
[0019] Модуль 38 вычисления силы отталкивания, соответствующей поперечной позиции, вычисляет силу отталкивания транспортного средства для уменьшения изменения поперечной позиции, которое формируется посредством возмущений при F/B-управлении поперечной позицией, на основе угла относительно вертикальной оси, кривизны, скорости транспортного средства и расстояния до сигнальной линии дорожной разметки в расположенной впереди фиксированной точке. Ниже описываются подробности модуля 38 вычисления силы отталкивания, соответствующей поперечной позиции.
Сумматор 32d суммирует силу отталкивания, соответствующую углу относительно вертикальной оси, и силу отталкивания, соответствующую поперечной позиции, и вычисляет силу отталкивания в поперечном направлении.
Модуль 32e вычисления целевого момента относительно вертикальной оси вычисляет целевой момент относительно вертикальной оси на основе силы отталкивания в поперечном направлении, колесной базы (расстояния между осями), нагрузки на ось задних колес и нагрузки на ось передних колес. В частности, значение, умножающее отношение нагрузки на ось задних колес относительно веса транспортного средства (нагрузки на ось передних колес + нагрузки на ось задних колес) и колесную базу, относительно силы отталкивания в поперечном направлении, должно быть целевым моментом относительно вертикальной оси.
Модуль 32f вычисления целевого углового ускорения относительно вертикальной оси вычисляет целевое угловое ускорение относительно вертикальной оси посредством умножения коэффициента момента инерции относительно вертикальной оси и целевого момента относительно вертикальной оси.
Модуль 32g вычисления целевой скорости относительно вертикальной оси вычисляет целевую скорость относительно вертикальной оси посредством умножения времени преодоления расстояния между движущимися в потоке транспортными средствами и целевого углового ускорения относительно вертикальной оси.
[0020] Модуль 32h вычисления задаваемого угла поворота вычисляет задаваемый угол  поворота для подавления внешних возмущений посредством обращения к следующей формуле на основе целевой скорости
поворота для подавления внешних возмущений посредством обращения к следующей формуле на основе целевой скорости  относительно вертикальной оси, колесной базы WHEEL_BASE, скорости V транспортного средства и характеристической скорости Vch транспортного средства. Здесь, характеристическая скорость Vch транспортного средства представляет собой параметр в известном "уравнении Аккермана", представляющем характеристики самостоятельного руления транспортного средства.
относительно вертикальной оси, колесной базы WHEEL_BASE, скорости V транспортного средства и характеристической скорости Vch транспортного средства. Здесь, характеристическая скорость Vch транспортного средства представляет собой параметр в известном "уравнении Аккермана", представляющем характеристики самостоятельного руления транспортного средства.
 ,
,
где M_PI является предварительно определенным коэффициентом.
Процессор 32i задания ограничений ограничивает максимальное значение и скорость изменения задаваемого угла  поворота для подавления внешних возмущений. В традиционном устройстве рулевого управления (в котором механически соединены модуль рулевого управления и поворотный модуль), когда угол поворота руля 6 при рулении находится в диапазоне углов люфта около нейтральной позиции (например, 3° влево и вправо), максимальное значение должно быть диапазоном изменения угла поворота передних колес 5FL, 5FR, соответствующим диапазону люфта (например, 0,2° влево и вправо).
поворота для подавления внешних возмущений. В традиционном устройстве рулевого управления (в котором механически соединены модуль рулевого управления и поворотный модуль), когда угол поворота руля 6 при рулении находится в диапазоне углов люфта около нейтральной позиции (например, 3° влево и вправо), максимальное значение должно быть диапазоном изменения угла поворота передних колес 5FL, 5FR, соответствующим диапазону люфта (например, 0,2° влево и вправо).
[0021] Фиг. 5 является блок-схемой управления модуля 37 вычисления силы отталкивания, соответствующей углу относительно вертикальной оси.
Модуль 37a верхнего и нижнего ограничения выполняет операцию задания верхнего и нижнего ограничения для угла относительно вертикальной оси. Когда угол относительно вертикальной оси является положительным значением (угол относительно вертикальной оси является положительным, когда сигнальная линия дорожной разметки пересекает линию, идущую в направлении движения рассматриваемого транспортного средства), модуль верхнего и нижнего ограничения задает значение равным или превышающим предварительно определенное значение, которое допускает подавление возмущений, задает значение, которое формируется посредством руления водителем, таким образом, что оно меньше значения, когда транспортное средство начинает вибрировать (например, 1°), и задает значение равным 0, когда угол относительно вертикальной оси является отрицательным.
Модуль 37b умножения F/B-усиления угла относительно вертикальной оси умножает F/B-усиление угла относительно вертикальной оси и угол относительно вертикальной оси после обработки задания ограничений. F/B-усиление угла относительно вертикальной оси должно быть равным или превышать предварительно определенное значение, что должно исключать недостаточную величину управления при обеспечении отклика, меньше значения, когда транспортное средство будет вибрировать, и значения, при котором водитель ощущает разрегулированность в нейтральных позициях угла поворота при рулении и угла поворота.
[0022] Модуль 37c умножения корректирующего усиления скорости транспортного средства умножает корректирующее усиление скорости транспортного средства и скорость транспортного средства. Корректирующее усиление скорости транспортного средства должно иметь характеристику, при которой максимальное значение находится в диапазоне 0-70 км/ч, постепенно уменьшается в диапазоне 70-130 км/ч и имеет минимальное значение (0) в диапазоне, который равен или превышает 130 км/ч.
Модуль 37d умножения корректирующего усиления кривизны умножает корректирующее усиление кривизны и кривизну. Корректирующее усиление кривизны должно иметь характеристику уменьшения по мере того, как становится больше кривизна, и верхний предел и нижний предел (0) задаются для него.
Умножитель 37e умножает каждый из выводов из модуля 37b умножения F/B-усиления угла относительно вертикальной оси, модуля 37c умножения корректирующего усиления скорости транспортного средства и модуля 37d умножения корректирующего усиления кривизны, чтобы определять силу отталкивания, соответствующую углу относительно вертикальной оси.
[0023] Фиг. 6 является блок-схемой управления модуля 38 вычисления силы отталкивания, соответствующей поперечной позиции.
Модуль 38a вычитания определяет отклонение поперечной позиции посредством вычитания расстояния до сигнальной линии дорожной разметки в расположенной впереди фиксированной точке из порогового значения поперечной позиции, которое задано заранее (например, 90 см).
Модуль 38b верхнего и нижнего ограничения выполняет операцию задания верхнего и нижнего ограничения для отклонения поперечной позиции. Модуль верхнего и нижнего ограничения принимает предварительно определенное положительное значение, когда отклонение поперечной позиции является положительным значением; это значение равно 0, когда отклонение поперечной позиции является отрицательным значением.
Модуль 38c умножения корректирующего усиления расстояния умножает корректирующее усиление расстояния и расстояние до сигнальной линии дорожной разметки в расположенной впереди фиксированной точке. Корректирующее усиление расстояния должно иметь характеристику принятия максимального значения, когда расстояние до сигнальной линии дорожной разметки равно или меньше предварительно определенного значения, и уменьшения по мере того, как становится больше расстояние при превышении предварительно определенного значения, и нижний предел задается для него.
[0024] Модуль 38d умножения F/B-усиления поперечной позиции умножает F/B-усиление поперечной позиции и расстояние до сигнальной линии дорожной разметки после того, как выполнена коррекция посредством модуля 38c умножения корректирующего усиления расстояния. F/B-усиление поперечной позиции должно быть равным или превышать предварительно определенное значение, что должно исключать недостаточную величину управления при обеспечении отклика, и меньше значения, когда транспортное средство будет вибрировать, и значения, при котором водитель ощущает разрегулированность в нейтральных позициях: оно также задано в качестве значения, которое меньше F/B-усиления угла относительно вертикальной оси модуля 37b вычисления F/B-усиления угла относительно вертикальной оси.
Модуль 38e умножения корректирующего усиления скорости транспортного средства умножает корректирующее усиление скорости транспортного средства и скорость транспортного средства. Корректирующее усиление скорости транспортного средства должно иметь такую характеристику, что максимальное значение находится в диапазоне 0-70 км/ч, постепенно уменьшается в диапазоне 70-130 км/ч и имеет минимальное значение (0) в пределах диапазона, равного или большего 130 км/ч.
Модуль 38f умножения корректирующего усиления кривизны умножает корректирующее усиление кривизны и кривизну. Корректирующее усиление кривизны должно иметь характеристику уменьшения по мере того, как становится больше кривизна, и верхний предел и нижний предел (0) задаются для него.
Умножитель 38g умножает каждый из выводов из модуля 38d умножения F/B-усиления поперечной позиции, модуля 38e умножения корректирующего усиления скорости транспортного средства и модуля 38f умножения корректирующего усиления кривизны, чтобы определять силу отталкивания, соответствующую поперечной позиции.
[0025] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ
В первом варианте осуществления, F/B-управление углом относительно вертикальной оси для уменьшения угла относительно вертикальной оси, сформированного посредством возмущений, и F/B-управление поперечной позицией для уменьшения изменения поперечной позиции, которое является интегрированным значением углов относительно вертикальной оси, сформированных посредством возмущений, выполняется в качестве управления устойчивостью. F/B-управление углом относительно вертикальной оси выполняется независимо от поперечной позиции, когда формируется угол относительно вертикальной оси, и F/B-управление поперечной позицией выполняется, когда расстояние до сигнальной линии дорожной разметки становится равным или меньше предварительно определенного порогового значения поперечной позиции (90 см). Иными словами, окрестность центра полосы движения становится мертвой зоной для F/B-управления поперечной позицией. Диапазоны регулирования двух видов F/B-управления проиллюстрированы на фиг. 7.  представляет собой угол относительно вертикальной оси.
представляет собой угол относительно вертикальной оси.
[0026] Фиг. 8 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает прерывистый боковой ветер, и когда транспортное средство предположительно перемещается около центра полосы движения. При F/B-управлении углом относительно вертикальной оси, когда транспортное средство принимает прерывистый боковой ветер, и формируется угол относительно вертикальной оси, вычисляется сила отталкивания, соответствующая углу относительно вертикальной оси, определяется задаваемый угол поворота для подавления внешних возмущений для получения силы отталкивания, и корректируется задаваемый SBW-угол поворота на основе угла поворота при рулении и скорости транспортного средства.
Когда транспортное средство движется вдоль полосы движения, в частности, на прямой дороге, направление сигнальной линии дорожной разметки и направление движения рассматриваемого транспортного средства совпадают; как результат, угол относительно вертикальной оси является нулевым. Иными словами, при F/B-управлении углом относительно вертикальной оси первого варианта осуществления, угол относительно вертикальной оси предположительно формируется посредством возмущений; следовательно, возможно повышение безопасности транспортного средства относительно возмущений, в частности, при движении по прямой, за счет уменьшения угла относительно вертикальной оси, и возможно уменьшение величины корректирующего руления водителя.
[0027] Традиционно, в качестве того, что подавляет влияние возмущений, таких как боковой ветер, на поведение транспортного средства, то, что прикладывает крутящий момент поворота для подавления внешних возмущений к системе рулевого управления, известно в традиционном устройстве рулевого управления, и то, что прикладывает компонент силы реакции при рулении, который способствует повороту для подавления внешних возмущений, известно в SBW-системе. Тем не менее, флуктуация силы реакции при рулении формируется в этих традиционных устройствах рулевого управления, что вызывает дискомфорт у водителя.
Напротив, при управлении устойчивостью, содержащем F/B-управление углом относительно вертикальной оси первого варианта осуществления, за счет фокусировки внимания на аспекте, в котором могут независимо управляться руль 6 и передние колеса 5L, 5R, что является характеристикой SBW-системы, в которой механически отделены руль 6 и передние колеса 5L и 5R, угол поворота передних колес 5L, 5R может управляться на основе задаваемого угла поворота, который суммирует задаваемый SBW-угол поворота, соответствующий углу поворота при рулении и скорости транспортного средства, и задаваемый угол поворота для подавления внешних возмущений, соответствующий углу относительно вертикальной оси, в то время как поперечная сила на шинах логически выводится на основе угла поворота при рулении и скорости транспортного средства; сила реакции при рулении управляется на основе задаваемой силы реакции при рулении, соответствующей логически выведенной поперечной силе на шинах и скорости транспортного средства.
Иными словами, поскольку угол поворота для подавления возмущений непосредственно применяется к передним колесам 5L, 5R, приложение компонента силы реакции при рулении, который способствует повороту для подавления внешних возмущений, становится необязательным. Кроме того, посредством приложения силы реакции при рулении, соответствующей поперечной силе на шинах, логически выведенной из угла поворота при рулении, флуктуация поперечной силы на шинах, сформированной посредством поворота для подавления внешних возмущений, не должна отражаться на силе реакции при рулении; как результат, может уменьшаться дискомфорт, вызываемый у водителя. В традиционной SBW-системе, поперечная сила на шинах логически выводится из осевой силы зубчатой рейки или угла поворота, обнаруженного посредством датчика, и прикладывается сила реакции при рулении, соответствующая логически выведенной поперечной силе на шинах. Следовательно, флуктуация поперечной силы на шинах, сформированной посредством поворота для подавления внешних возмущений, всегда должна отражаться на силе реакции при рулении, что создает дискомфорт для водителя. В первом варианте осуществления, только поперечная сила на шинах, которая формируется посредством руления водителем, отражается на силе реакции при рулении, и сила реакции при рулении не колеблется вследствие поворота для подавления внешних возмущений; следовательно, может уменьшаться дискомфорт, вызываемый у водителя.
[0028] Здесь, разрегулированность в нейтральных позициях угла поворота при рулении и угла поворота становится проблемой при применении угла поворота для подавления возмущений непосредственно к передним колесам 5L, 5R; тем не менее, в первом варианте осуществления, задаваемый угол поворота для подавления внешних возмущений задается как диапазон изменения угла поворота передних колес 5FL, 5FR (0,2° влево и вправо), соответствующий диапазону люфта, когда руль 6 находится в диапазоне углов люфта около нейтральной позиции угла поворота при рулении (3° влево и вправо) в традиционном устройстве рулевого управления. Формирование угла относительно вертикальной оси посредством возмущений более заметно при движении по прямой, чем при повороте; при движении по прямой, угол поворота при рулении находится около нейтральной позиции угла поворота при рулении. Другими словами, поскольку коррекция угла поворота посредством F/B-управления углом относительно вертикальной оси главным образом выполняется около нейтральной позиции угла поворота при рулении, подавление дискомфорта, который сопровождает разрегулированность в нейтральных позициях, возможно посредством подавления величины разрегулированности в нейтральных позициях между углом поворота при рулении и углом поворота, которая сопровождает применение задаваемого угла поворота для подавления внешних возмущений в диапазоне люфта руления.
Кроме того, поскольку задаваемый угол поворота для подавления внешних возмущений ограничен диапазоном 0,2° влево и вправо, водитель может изменять направление движения транспортного средства в требуемом направлении посредством ввода руления даже во время управления устойчивостью. Иными словами, поскольку величина коррекции угла поворота посредством задаваемого угла поворота для подавления внешних возмущений является незначительной относительно величины изменения угла поворота, сформированного посредством ввода руления водителя, возможно повышение безопасности транспортного средства относительно возмущений без помех для руления водителем.
[0029] Традиционно, управление недопущением выезда за пределы полосы движения, которое прикладывает момент относительно вертикальной оси для недопущения выезда за пределы полосы движения транспортного средства, когда обнаружена тенденция выезда за пределы полосы движения транспортного средства, или управление удержанием на полосе движения, которое прикладывает момент относительно вертикальной оси к транспортному средству таким образом, что транспортное средство должно двигаться около центра полосы движения, известны в качестве видов управления, которые управляют поперечным движением транспортного средства. Тем не менее, управление недопущением выезда за пределы полосы движения представляет собой управление, имеющее пороговое значение прерывания управления, и управление не активируется около центра полосы движения; следовательно, не может обеспечиваться безопасность транспортного средства относительно возмущений. Кроме того, поскольку прерывание управления осуществляется вследствие порогового значения, даже если водитель хочет переместить транспортное средство к краю полосы движения, то водитель испытывает некоторые затруднения. С другой стороны, управление удержанием на полосе движения представляет собой управление, имеющее такую целевую позицию (целевую линию), что тогда как может обеспечиваться безопасность транспортного средства относительно возмущений, невозможно обеспечивать принудительное движение транспортного средства по линии, которая отклоняется от целевой линии. Помимо этого, поскольку управление должно быть прекращено, когда сила захвата водителя на руле уменьшается вследствие определения того, что возникает состояние снятых с руля рук, водитель должен постоянно захватывать руль с силой выше определенного уровня; как результат, возникает большая нагрузка по рулению на водителя.
Напротив, F/B-управление углом относительно вертикальной оси первого варианта осуществления не имеет порогового значения прерывания управления; следовательно, возможно непрерывное обеспечение безопасности относительно возмущений за счет прозрачного управления. Кроме того, поскольку вышеуказанное не имеет целевой позиции, водитель может управлять транспортным средством в требуемой линии. Кроме того, управление не должно прекращаться, даже если руль 6 слегка удерживается, обеспечивая возможность уменьшения нагрузки по рулению на водителя.
[0030] Фиг. 9 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда F/B-управление поперечной позицией не выполняется, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает постоянный боковой ветер, и транспортное средство предположительно перемещается около центра полосы движения. Когда транспортное средство принимает постоянный боковой ветер, и формируется угол относительно вертикальной оси, угол относительно вертикальной оси уменьшается вследствие F/B-управления углом относительно вертикальной оси, но транспортное средство по-прежнему принимает постоянный боковой ветер и дрейфует. Это обусловлено тем, что F/B-управление углом относительно вертикальной оси служит для уменьшения угла относительно вертикальной оси и не корректирует угол поворота, когда угол относительно вертикальной оси является нулевым; следовательно, невозможно непосредственное уменьшение изменения поперечной позиции, которое является интегрированным значением углов относительно вертикальной оси, которые формируются вследствие возмущений. Косвенное подавление изменения поперечной позиции (подавление увеличения интегрированного значения углов относительно вертикальной оси) возможно посредством задания силы отталкивания, соответствующей углу относительно вертикальной оси, равной большому значению; тем не менее, поскольку максимальное значение задаваемого угла поворота для подавления внешних возмущений ограничено 0,2° влево и вправо, с тем чтобы не вызывать дискомфорт у водителя, эффективное подавление дрейфа транспортного средства только с помощью F/B-управления углом относительно вертикальной оси является затруднительным. Кроме того, F/B-усиление угла относительно вертикальной оси для определения силы отталкивания, соответствующей углу относительно вертикальной оси, задается максимально возможно большим значением, поскольку требуется схождение угла относительно вертикальной оси до того, как водитель замечает изменение угла относительно вертикальной оси; тем не менее, поскольку транспортное средство вибрирует, если оно остается без изменений, угол относительно вертикальной оси, который умножается на F/B-усиление угла относительно вертикальной оси, ограничен таким образом, что он равен или меньше верхнего предела (1°), посредством модуля 37a верхнего и нижнего ограничения. Другими словами, поскольку сила отталкивания, соответствующая углу относительно вертикальной оси, представляет собой силу отталкивания, соответствующую углу относительно вертикальной оси, который меньше фактического угла относительно вертикальной оси, этот аспект также демонстрирует то, что эффективное подавление сноса транспортного средства только с помощью F/B-управления углом относительно вертикальной оси является затруднительным.
[0031] Следовательно, при управлении устойчивостью первого варианта осуществления, F/B-управление поперечной позицией вводится, чтобы подавлять дрейф транспортного средства посредством установившихся возмущений. Фиг. 10 является временной диаграммой, иллюстрирующей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда F/B-управление поперечной позицией выполнено, когда транспортное средство, движущееся по прямой дороге на шоссе, принимает постоянный боковой ветер, и при F/B-управлении поперечной позицией; когда транспортное средство, движущееся в окрестности центра полосы движения принимает постоянный боковой ветер и дрейфует, и расстояние до сигнальной линии дорожной разметки становится равным или меньше порогового значения поперечной позиции, вычисляется сила отталкивания, соответствующая изменению поперечной позиции (==интегрированное значение угла относительно вертикальной оси). В модуле 32 вычисления задаваемого угла поворота для подавления внешних возмущений вычисляется задаваемый угол поворота для подавления внешних возмущений на основе силы отталкивания в поперечном направлении, которая суммирует силу отталкивания, соответствующую поперечной позиции, и силу отталкивания, соответствующую углу относительно вертикальной оси, и корректируется задаваемый SBW-угол поворота. Иными словами, при F/B-управлении поперечной позицией, корректируется задаваемый SBW-угол поворота посредством задаваемого угла поворота для подавления внешних возмущений, соответствующего поперечной позиции; как результат, возможно непосредственное уменьшение изменения поперечной позиции, вызываемого посредством установившихся возмущений, и может подавляться дрейф транспортного средства. Другими словами, возможно возвращение позиции движения транспортного средства, проводящего F/B-управление углом относительно вертикальной, оси в окрестность центра полосы движения, которая является мертвой зоной для F/B-управления поперечной позицией.
[0032] Как описано выше, управление устойчивостью первого варианта осуществления уменьшает изменение угла относительно вертикальной оси вследствие неустановившихся возмущений с помощью F/B-управления углом относительно вертикальной оси, и уменьшает интегрированное значение угла относительно вертикальной оси (изменение поперечной позиции) вследствие установившихся возмущений с помощью F/B-управления поперечной позицией; как результат, управление устойчивостью допускает повышение безопасности транспортного средства относительно неустановившихся и установившихся возмущений.
Кроме того, управление устойчивостью первого варианта осуществления ограничивает поведение транспортного средства, которое формируется посредством управления (применения задаваемого угла поворота для подавления внешних возмущений), уровнем, который не замечается водителем, и уровнем, который не создает помехи для изменения поведения транспортного средства, которое формируется посредством руления водителем; оно не отражает изменение стабилизирующего крутящего момента, сформированного посредством управления для силы реакции при рулении, и в силу этого может выполняться без знания водителем того, что осуществляется управление устойчивостью. Как результат, возможно моделирование поведения транспортного средства таким образом, что оно имеет характеристики кузова транспортного средства с превосходной устойчивостью к возмущениям.
F/B-усиление поперечной позиции для определения силы отталкивания, соответствующей поперечной позиции при F/B-управлении поперечной позицией, задается равным значению, которое меньше F/B-усиления угла относительно вертикальной оси. Как описано выше, F/B-управление углом относительно вертикальной оси должно быть чувствительным вследствие необходимости схождения угла относительно вертикальной оси до того, как водитель ощутит изменение угла относительно вертикальной оси, вызываемое посредством неустановившихся возмущений, тогда как F/B-управление поперечной позицией не требует настолько большого отклика, как F/B-управление углом относительно вертикальной оси, поскольку требуется прекращение увеличения изменения поперечной позиции, и поперечная позиция требует времени для изменения вследствие накопления интегрированного значения угла относительно вертикальной оси. Помимо этого, это обусловлено тем, что если должно увеличиваться F/B-усиление поперечной позиции, величина управления значительно изменяется согласно абсолютной величине возмущений, и вызывается дискомфорт у водителя.
[0033] МОДУЛЬ ВЫЧИСЛЕНИЯ СМЕЩЕНИЯ ПОПЕРЕЧНОЙ СИЛЫ
ФИГ. 11 является блок-схемой управления модуля 34 вычисления смещения поперечной силы.
Модуль 34a вычисления кривизны вычисляет кривизну сигнальной линии дорожной разметки в расположенной впереди фиксированной точке. Либо левая, либо правая сигнальная линия дорожной разметки может использоваться в качестве сигнальной линии дорожной разметки.
Модуль 34b верхнего и нижнего ограничения выполняет операцию задания верхнего и нижнего ограничения для скорости транспортного средства.
Модуль 34c вычисления SAT-усиления вычисляет SAT-усиление, соответствующее скорости транспортного средства, на основе скорости транспортного средства после операции задания ограничения. SAT-усиления должны иметь характеристику увеличения усиления по мере того, как возрастает скорость транспортного средства, и верхний предел задается для него.
Умножитель 34d определяет величину смещения поперечной силы посредством умножения кривизны и SAT-усиления.
Процессор 34e задания ограничений ограничивает максимальное значение и верхний предел скорости изменения величины смещения поперечной силы. Например, максимальное значение составляет 1000 Н, а верхний предел скорости изменения составляет 600 Н/с.
[0034] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕГО КРИВИЗНЕ
Управление смещением силы реакции, соответствующее кривизне, определяет большую величину смещения поперечной силы, по мере того, как возрастает кривизна сигнальной линии дорожной разметки, которая вычитается из поперечной силы на шинах. Крутящий момент силы реакции при рулении, соответствующий поперечной силе на шинах, которая вычисляется посредством модуля 35 вычисления SAT, т.е. характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, за счет этого смещается в направлении кодирования, идентичном направлению кодирования стабилизирующего крутящего момента, по мере того, как возрастает кривизна сигнальной линии дорожной разметки, как проиллюстрировано на фиг. 12. Фиг. 12 иллюстрирует случай правой кривой, и в случае левой кривой, смещение выполняется в направлении, противоположном относительно направления, проиллюстрированного на фиг. 12.
[0035] Традиционно, в SBW-системе, в которой механически отделены модуль рулевого управления и поворотный модуль, задается характеристика силы реакции при рулении, которая моделирует силу реакции при рулении, соответствующую стабилизирующему крутящему моменту в традиционном устройстве рулевого управления, и сила реакции при рулении прикладывается к рулю на основе характеристики силы реакции при рулении; в это время, взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота водителя имеет характеристику A, проиллюстрированную на фиг. 13. Иными словами, абсолютное значение крутящего момента поворота увеличивается по мере того, как возрастает абсолютное значение угла поворота при рулении, и величина изменения крутящего момента поворота относительно величины изменения угла поворота при рулении увеличивается, когда абсолютное значение угла поворота при рулении является небольшим, по сравнению со случаем, когда он является большим.
[0036] Здесь, рассматривается случай, в котором водитель изменяет крутящий момент удержания руления, чтобы регулировать курс во время поворота. На фиг. 13, когда водитель уменьшает крутящий момент удержания руления до T2 из состояния, в котором угол θ1 поворота при рулении удерживается с помощью крутящего момента T1 удержания руления, угол поворота при рулении становится θ2, и угол поворота передних колес 5L, 5R уменьшается вследствие уменьшения угла поворота при рулении. В это время, вследствие характеристики силы реакции при рулении в SBW-системе, описанной выше, угол поворота при рулении варьируется больше относительно изменения крутящего момента силы реакции при рулении по мере того, как возрастает кривизна кривой. Другими словами, чувствительность транспортного средства относительно крутящего момента поворота при рулении увеличивается по мере того, как возрастает кривизна кривой; как результат, имеется проблема в том, что регулирование курса является затруднительным.
[0037] Напротив, при управлении смещением силы реакции, соответствующем кривизне первого варианта осуществления, посредством смещения характеристики силы реакции при рулении больше, что представляет крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, в направлении, идентичном направлению стабилизирующего крутящего момента, характеристика, представляющая взаимосвязь между углом поворота при рулении и крутящим моментом поворота, смещается в направлении кодирования, идентичном направлению кодирования угла поворота при рулении, как проиллюстрировано на фиг. 14, и характеристика A изменяется на характеристику B. Величина изменения угла поворота при рулении относительно величины изменения крутящего момента удержания руления за счет этого уменьшается по мере того, как возрастает кривизна сигнальной линии дорожной разметки; даже когда водитель уменьшает крутящий момент удержания руления до T4, и когда величина ΔT3-4 уменьшения крутящего момента удержания руления является идентичной величине ΔT1-2 уменьшения предшествующего уровня техники, величина Δθ1-4 уменьшения угла поворота при рулении становится меньше величины Δθ1-2 уменьшения предшествующего уровня техники. Иными словами, варьирование угла поворота при рулении относительно изменения крутящего момента удержания руления может задаваться меньшим по мере того, как возрастает кривизна кривой, и может уменьшаться чувствительность транспортного средства относительно крутящего момента поворота при рулении; как результат, изменение поведения транспортного средства становится постепенным, и возможно упрощение регулирования курса водителем. Кроме того, поскольку крутящий момент T3 удержания руления (<T1) для поддержания угла θ1 поворота при рулении может задаваться меньшим крутящего момента T3 удержания руления из предшествующего уровня техники, может уменьшаться нагрузка по рулению на водителя при повороте.
[0038] Традиционно, известна технология, которая направлена на уменьшение нагрузки по рулению на водителя при повороте, которая уменьшает наклон характеристики силы реакции при рулении больше по мере того, как возрастает кривизна сигнальной линии дорожной разметки; тем не менее, в традиционной технологии, переменность угла поворота при рулении относительно изменения крутящего момента удержания руления увеличивается по мере того, как возрастает кривизна, так что увеличивается чувствительность транспортного средства относительно крутящего момента поворота при рулении. Иными словами, возможны реализация уменьшения нагрузки по рулению на водителя при повороте и упрощение регулирования курса посредством смещения характеристики силы реакции при рулении в направлении, идентичном направлению стабилизирующего крутящего момента в соответствии с кривизной сигнальной линии дорожной разметки.
[0039] МОДУЛЬ ВЫЧИСЛЕНИЯ СМЕЩЕНИЯ КРУТЯЩЕГО МОМЕНТА СИЛЫ РЕАКЦИИ ПРИ РУЛЕНИИ
ФИГ. 15 является блок-схемой управления модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
Модуль 36a вычисления угла относительно вертикальной оси вычисляет угол относительно вертикальной оси в расположенной впереди фиксированной точке. Угол относительно вертикальной оси может быть легко и точно обнаружен посредством вычисления угла относительно вертикальной оси на основе изображения проезжаемого пути, захваченного посредством камеры 17. Либо левая, либо правая сигнальная линия дорожной разметки может использоваться в качестве сигнальной линии дорожной разметки.
Модуль 36b вычисления поперечной позиции вычисляет каждую из поперечной позицию относительно левой и правой сигнальных линий дорожной разметки в расположенной впереди фиксированной точке и поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в текущей позиции. Здесь, когда рассматриваемое транспортное средство перемещается в смежную полосу движения за пределами сигнальной линии дорожной разметки, т.е. когда возникает смена полосы движения, модуль 36b вычисления поперечной позиции заменяет поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в текущей позиции. Иными словами, поперечная позиция относительно левой сигнальной линии дорожной разметки до достижения сигнальной линии дорожной разметки задается в качестве поперечной позиции относительно правой сигнальной линии дорожной разметки после достижения сигнальной линии дорожной разметки; поперечная позиция относительно правой сигнальной линии дорожной разметки до достижения сигнальной линии дорожной разметки задается в качестве поперечной позиции относительно левой сигнальной линии дорожной разметки после достижения сигнальной линии дорожной разметки. При смене полосы движения на полосу движения с другой шириной полосы движения, поперечная позиция корректируется посредством умножения значения W2/W1, полученного посредством деления ширины W2 полосы движения полосы движения после смены полосы движения на ширину W1 полосы движения полосы движения перед сменой полосы движения, на замененную поперечную позицию. Здесь, информация ширины полосы движения для каждой полосы движения получается из навигационной системы 24.
Модуль 39 вычисления силы реакции, соответствующий допустимому времени отклонения, вычисляет силу реакции, соответствующую допустимому времени отклонения на основе скорости транспортного средства и поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в расположенной впереди фиксированной точке. Ниже описываются подробности модуля 39 вычисления силы реакции, соответствующего допустимому времени отклонения.
Модуль 40 вычисления силы реакции, соответствующий поперечной позиции, вычисляет силу реакции, соответствующую поперечной позиции, на основе поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в текущей позиции. Ниже описываются подробности модуля 40 вычисления силы реакции, соответствующего поперечной позиции.
Модуль 36c выбора силы реакции выбирает силу реакции с большим абсолютным значением из силы реакции, соответствующей допустимому времени отклонения, и силы реакции, соответствующей поперечной позиции, в качестве величины смещения крутящего момента силы реакции при рулении.
Процессор 36d задания ограничений ограничивает максимальное значение и верхний предел скорости изменения величины смещения крутящего момента силы реакции при рулении. Например, максимальное значение составляет 2 Нм, и верхний предел скорости изменения составляет 10 Нм/с.
[0040] Фиг. 16 является блок-схемой управления модуля 39 вычисления силы реакции, соответствующего допустимому времени отклонения. Умножитель 39a определяет поперечную скорость транспортного средства посредством умножения скорости транспортного средства и угла относительно вертикальной оси.
Делитель 39b определяет допустимое время отклонения относительно левой сигнальной линии дорожной разметки посредством деления поперечной позиции относительно левой сигнальной линии дорожной разметки в расположенной впереди фиксированной точке на поперечную скорость.
Делитель 39c определяет допустимое время отклонения относительно правой сигнальной линии дорожной разметки посредством деления поперечной позиции относительно правой сигнальной линии дорожной разметки в расположенной впереди фиксированной точке на поперечную скорость.
Модуль 39d выбора допустимого времени отклонения выбирает меньшее из допустимых времен отклонения относительно левой и правой сигнальных линий дорожной разметки в качестве допустимого времени отклонения.
Модуль 39e вычисления силы реакции, соответствующий допустимому времени отклонения, вычисляет силу реакции, соответствующую допустимому времени отклонения, на основе допустимого времени отклонения. Сила реакции, соответствующая допустимому времени отклонения, является обратно пропорциональной допустимому времени отклонения (пропорциональной обратной величине относительно допустимого времени отклонения) и имеет характеристику почти нулевого значения через три секунды или больше.
[0041] Фиг. 17 является блок-схемой управления модуля 40 вычисления силы реакции, соответствующего поперечной позиции.
Модуль 40a вычитания определяет отклонение поперечной позиции относительно левой полосы движения посредством вычитания поперечной позиции относительно левой полосы движения из целевой левой поперечной позиции, которая задается заранее (например, 90 см).
Модуль 40b вычитания определяет отклонение поперечной позиции относительно правой полосы движения посредством вычитания поперечной позиции относительно правой полосы движения из целевой правой поперечной позиции, которая задается заранее (например, 90 см).
Модуль 40c выбора отклонения поперечной позиции выбирает большее из отклонений поперечной позиции относительно левой и правой полос движения в качестве отклонения поперечной позиции.
Модуль 40d вычисления силы реакции, соответствующий отклонению поперечной позиции, вычисляет силу реакции, соответствующую поперечной позиции, на основе отклонения поперечной позиции. Сила реакции, соответствующая поперечной позиции, задается с возможностью иметь характеристику увеличения по мере того, как возрастает отклонение поперечной позиции, и верхний предел задается для нее.
[0042] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕГО ПОПЕРЕЧНОЙ ПОЗИЦИИ
Управление смещением силы реакции, соответствующее поперечной позиции, суммирует силу реакции, соответствующую поперечной позиции, с крутящим моментом силы реакции при рулении, чтобы определять величину смещения крутящего момента силы реакции при рулении. Характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, за счет этого смещается в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении, по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, как проиллюстрировано на фиг. 18. Фиг. 18 иллюстрирует случай близости к правой полосе движения, а в случае близости к левой полосе движения, смещение выполняется в противоположном направлении относительно направления на фиг. 18.
[0043] Здесь, рассматривается случай, в котором позиция движения транспортного средства сдвигается в правую сторону вследствие внезапного руления водителем вправо, после чего водитель возвращает позицию движения в окрестность центра полосы движения с помощью корректирующего руления, при традиционном управлении силой реакции при рулении. Угол поворота при рулении и крутящий момент поворота при рулении, когда водитель осуществляет внезапную операцию, должны представлять собой позицию точки P1 для характеристики A на фиг. 19. Характеристика A должна представлять собой характеристику, представляющую взаимосвязь между углом поворота при рулении и крутящим моментом поворота при рулении, при задании характеристики силы реакции при рулении, моделирующей традиционное устройство рулевого управления, идентично фиг. 13. Поскольку поворот переднего колеса необходим для того, чтобы возвращать позицию движения в окрестность центра полосы движения из этого состояния, после увеличенного руления в нейтральную позицию угла поворота при рулении, водитель увеличивает руление от нейтральной позиции угла поворота при рулении, чтобы обеспечивать согласование руля с целевым углом 65. В это время, в традиционной технологии, описанной выше, совпадают нейтральная позиция угла поворота при рулении (нулевая точка угла поворота при рулении) и нейтральная позиция крутящего момента поворота при рулении (нулевая точка крутящего момента поворота при рулении), и требуется уменьшение крутящего момента поворота при рулении до тех пор, пока угол поворота при рулении не будет в нейтральной позиции, при увеличении крутящего момента поворота при рулении после прохождения нейтральной позиции угла поворота при рулении. Другими словами, при проведении корректирующего руления, переходящего нейтральную позицию угла поворота при рулении, знак крутящего момента поворота при рулении изменяется на противоположный, и переключается направление, в котором водитель управляет силой; поскольку величина изменения угла поворота при рулении относительно величины изменения крутящего момента поворота при рулении значительно меньше около нейтральной позиции крутящего момента поворота при рулении, по сравнению с другими областями угла поворота при рулении, нагрузка по рулению на водителя является большой, и управление рулем таким образом, что он имеет целевой угол θ5, является затруднительным. Таким образом, имеется проблема в том, что позиция движения транспортного средства легко выходит за установленные пределы, приводя к росту величины корректирующего руления.
[0044] Напротив, при управлении смещением силы реакции, соответствующем поперечной позиции, по первому варианту осуществления, посредством смещения крутящего момента силы реакции при рулении, соответствующего стабилизирующему крутящему моменту, больше в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении увеличивается по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, характеристика, представляющая взаимосвязь между углом поворота при рулении и крутящим моментом поворота, смещается в направлении, в котором увеличивается абсолютное значение крутящего момента поворота при рулении, как проиллюстрировано на фиг. 20, и характеристика A изменяется непрерывно на характеристику C по мере того, как сокращается расстояние до сигнальной линии дорожной разметки. В это время, увеличение крутящего момента поворота при рулении необходимо для того, чтобы поддерживать угол поворота при рулении; следовательно, если крутящий момент поворота при рулении является постоянным, руль 6 постепенно возвращается в нейтральную позицию угла поворота при рулении (точка P1->точка P2), за счет этого подавляя сдвиг позиции движения транспортного средства в правую сторону вследствие внезапного увеличения руления водителем. С другой стороны, когда водитель поддерживает угол поворота при рулении, угол поворота при рулении и крутящий момент поворота при рулении перемещаются из точки P1 в точку P3. Когда водитель осуществляет корректирующее руление из этого состояния, поскольку нейтральная позиция крутящего момента поворота при рулении смещается больше в сторону увеличения руления, чем нейтральная позиция угла поворота при рулении в характеристике C, знак крутящего момента поворота при рулении не изменяется на противоположный до достижения нейтральной позиции крутящего момента поворота при рулении, когда руление увеличивается от нейтральной позиции угла поворота при рулении. Таким образом, водитель может управлять углом поворота передних колес 5L, 5R только посредством уменьшения крутящего момента поворота при рулении и прекращения вращения руля 6, когда руль 6 поворачивается до целевого угла. Иными словами, управление смещением силы реакции, соответствующее поперечной позиции, по первому варианту осуществления может упрощать корректирующее руление от водителя, поскольку направление, в котором водитель управляет силой, не переключается легко. Как результат, позиция движения транспортного средства не выходит легко за установленные пределы, и может уменьшаться величина корректирующего руления.
[0045] Традиционно, известна технология, в которой цель заключается в том, чтобы не допускать сдвига позиции движения вследствие внезапного увеличения водителем силы реакции при рулении при приближении к сигнальной линии дорожной разметки; тем не менее, в традиционной технологии, руль сконфигурирован с возможностью просто становиться более тяжелым при приближении к сигнальной линии дорожной разметки, и нейтральная позиция крутящего момента поворота при рулении в характеристике силы реакции при рулении всегда совпадает с нейтральной позицией угла поворота при рулении; следовательно, знак крутящего момента поворота при рулении изменяется на противоположный при корректирующем рулении, которое переходит нейтральную позицию угла поворота при рулении, и нагрузка по рулению на водителя не уменьшается. Другими словами, посредством смещения крутящего момента силы реакции при рулении, соответствующего стабилизирующему крутящему моменту, больше в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении увеличивается по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, возможна реализация как подавления сдвига позиции движения, так и уменьшения нагрузки по рулению на водителя.
[0046] Кроме того, при управлении смещением силы реакции, соответствующем поперечной позиции, по первому варианту осуществления, величина смещения сконфигурирована с возможностью быть больше по мере того, как сокращается расстояние до сигнальной линии дорожной разметки; как результат, нейтральная позиция крутящего момента поворота при рулении смещается в позицию, которая дополнительно отделена от нейтральной позиции угла поворота при рулении по мере того, как сокращается расстояние до сигнальной линии дорожной разметки. Когда водитель осуществляет корректирующее руление для того, чтобы возвращать позицию движения транспортного средства в окрестность центра полосы движения, требуется увеличение величины увеличения руления от нейтральной позиции угла поворота при рулении по мере того, как приближается сигнальная линия дорожной разметки. В это время, когда величина смещения нейтральной позиции крутящего момента поворота при рулении относительно нейтральной позиции угла поворота при рулении является небольшой, имеется вероятность того, что крутящий момент поворота при рулении превышает нейтральную позицию, и знак крутящего момента поворота при рулении изменяется на противоположный до того, как руль поворачивается до целевого угла. Таким образом, возможно подавление прохождения нейтральной позиции посредством крутящего момента поворота при рулении посредством увеличения величины смещения по мере того, как сокращается расстояние до сигнальной линии дорожной разметки.
[0047] При управлении смещением силы реакции, соответствующем поперечной позиции, по первому варианту осуществления, модуль 36b вычисления поперечной позиции переключает поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в текущей позиции, когда рассматриваемое транспортное средство достигает сигнальной линии дорожной разметки. Управление смещением силы реакции, соответствующее поперечной позиции, имеет такую конфигурацию, в которой рассматриваемое транспортное средство легко возвращается в окрестность центра полосы движения посредством увеличения силы реакции при рулении по мере того, как рассматриваемое транспортное средство удаляется от окрестности центра полосы движения. Другими словами, интегрированное значение угла относительно вертикальной оси (изменение поперечной позиции) считается возмущениями, и сила реакции при рулении управляется таким образом, что транспортное средство направляется в направлении, в котором исключается интегрированное значение угла относительно вертикальной оси. Следовательно, требуется сброс интегрированного значения угла относительно вертикальной оси, когда осуществлена смена полосы движения. Это обусловлено тем, что если интегрированное значение угла относительно вертикальной оси не сбрасывается, сила реакции при рулении для возвращения транспортного средства в окрестность центра полосы движения до смены полосы движения продолжает действовать даже после смены полосы движения, и операция водителя будет запрещена. Если интегрированное значение просто задано равным нулю, невозможно направление транспортного средства в окрестность центра полосы движения после смены полосы движения.
[0048] Следовательно, в первом варианте осуществления, поскольку преднамеренная операция водителя может рассматриваться, когда рассматриваемое транспортное средство достигает сигнальной линии дорожной разметки, в этом случае посредством переключения поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в текущей позиции, другими словами, посредством изменения на противоположный знака интегрированного значения угла относительно вертикальной оси, позиция, в которую направляется рассматриваемое транспортное средство, переключается из окрестности центра полосы движения перед сменой полосы движения на окрестность центра полосы движения после смены полосы движения; следовательно, может формироваться сила реакции при рулении для направления рассматриваемого транспортного средства в окрестность центра полосы движения после смены полосы движения. В это время, для того чтобы учитывать отношение W2/W1 ширины W2 полосы движения полосы движения после смены полосы движения относительно ширины W1 полосы движения полосы движения до смены полосы движения, возможно задание точной поперечной позиции, и возможно задание оптимальной величины смещения для направления рассматриваемого транспортного средства в окрестность центра полосы движения.
[0049] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕГО ДОПУСТИМОМУ ВРЕМЕНИ ОТКЛОНЕНИЯ
Управление смещением силы реакции, соответствующее допустимому времени отклонения, суммирует силу реакции, соответствующую допустимому времени отклонения, с крутящим моментом силы реакции при рулении, чтобы определять величину смещения крутящего момента силы реакции при рулении. Характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, соответствующий стабилизирующему крутящему моменту, за счет этого смещается в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении по мере того, как уменьшается допустимое время отклонения, как проиллюстрировано на фиг. 18. Фиг. 18 иллюстрирует случай близости к правой полосе движения, а в случае близости к левой полосе движения, смещение выполняется в противоположном направлении относительно направления, показанного на фиг. 18.
[0050] Соответственно, характеристика, представляющая взаимосвязь между углом поворота при рулении и крутящим моментом поворота при рулении смещается в направлении, в котором увеличивается абсолютное значение крутящего момента поворота при рулении, и характеристика A изменяется непрерывно на характеристику C по мере того, как уменьшается допустимое время отклонения, как проиллюстрировано на фиг. 20. В это время, требуется увеличение крутящего момента поворота при рулении, чтобы поддерживать угол поворота при рулении; следовательно, если крутящий момент поворота при рулении является постоянным, руль 6 постепенно возвращается в нейтральную позицию угла поворота при рулении (точка P1->точка P2), за счет этого подавляя сдвиг позиции движения транспортного средства в правую сторону вследствие внезапного руления водителем. С другой стороны, когда водитель поддерживает угол поворота при рулении, угол поворота при рулении и крутящий момент поворота при рулении перемещаются из точки P1 в точку P3. Когда водитель осуществляет корректирующее руление из этого состояния, поскольку нейтральная позиция крутящего момента поворота при рулении смещается больше в сторону увеличения руления, чем нейтральная позиция угла поворота при рулении в характеристике C, знак крутящего момента поворота при рулении не изменяется на противоположный до достижения нейтральной позиции крутящего момента поворота при рулении, когда руление увеличивается от нейтральной позиции угла поворота при рулении. Таким образом, водитель может управлять углом поворота передних колес 5L, 5R только посредством уменьшения крутящего момента поворота при рулении и прекращения вращения руля 6, когда руль 6 поворачивается до целевого угла. Иными словами, управление смещением силы реакции, соответствующее допустимому времени отклонения, по первому варианту осуществления может упрощать корректирующее руление водителя, поскольку направление, в котором водитель управляет силой, не переключается легко. Как результат, позиция движения транспортного средства не выходит легко за установленные пределы, и может уменьшаться величина корректирующего руления.
[0051] Кроме того, при управлении смещением силы реакции, соответствующем допустимому времени отклонения, по первому варианту осуществления, величина смещения сконфигурирована с возможностью увеличиваться по мере того, как уменьшается допустимое время отклонения; как результат, нейтральная позиция крутящего момента поворота при рулении смещается в позицию, которая дополнительно отделена от нейтральной позиции угла поворота при рулении по мере того, как уменьшается допустимое время отклонения. Когда водитель осуществляет корректирующее руление для возвращения позиции движения транспортного средства в окрестность центра полосы движения, транспортное средство с большей вероятностью должно находиться ближе к сигнальной линии дорожной разметки по мере того, как уменьшается допустимое время отклонения, и требуется увеличение величины руления от нейтральной позиции угла поворота при рулении по мере того, как становится ближе сигнальная линия дорожной разметки. В это время, когда величина смещения нейтральной позиции крутящего момента поворота при рулении относительно нейтральной позиции угла поворота при рулении является небольшой, имеется вероятность того, что крутящий момент поворота при рулении превышает нейтральную позицию, и знак крутящего момента поворота при рулении изменяется на противоположный до того, как руль поворачивается до целевого угла. Таким образом, возможно подавление прохождения нейтральной позиции посредством крутящего момента поворота при рулении посредством увеличения величины смещения по мере того, как сокращается расстояние до сигнальной линии дорожной разметки.
[0052] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, СООТВЕТСТВУЮЩЕГО ПОПЕРЕЧНОЙ ПОЗИЦИИ И ДОПУСТИМОМУ ВРЕМЕНИ ОТКЛОНЕНИЯ
В модуле 20 управления силой реакции при рулении, сила реакции с большим абсолютным значением из силы реакции, соответствующей допустимому времени отклонения, и силы реакции, соответствующей поперечной позиции, выбирается в качестве величины смещения крутящего момента силы реакции при рулении в модуле 36 вычисления смещения крутящего момента поворота при рулении, и величина смещения крутящего момента силы реакции при рулении суммируется с крутящим моментом силы реакции при рулении в сумматоре 20c. Характеристика силы реакции при рулении за счет этого смещается в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении, в соответствии с допустимым временем отклонения или поперечной позицией.
При управлении смещением силы реакции, соответствующем допустимому времени отклонения, сила реакции, соответствующая допустимому времени отклонения, является нулевой, когда рассматриваемое транспортное средство и сигнальная линия дорожной разметки являются параллельными, т.е. когда угол относительно вертикальной оси является нулевым. Следовательно, даже если рассматриваемое транспортное средство находится в позиции близко к сигнальной линии дорожной разметки, когда угол относительно вертикальной оси является небольшим, может выводиться только небольшая сила реакции. Напротив, при управлении смещением силы реакции, соответствующем поперечной позиции, сила реакции (сила реакции, соответствующая поперечной позиции) формируется пропорциональной расстоянию до сигнальной линии дорожной разметки; следовательно, большая сила реакции может выводиться по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, и возможно простое возвращение рассматриваемого транспортного средства в окрестность центра полосы движения.
[0053] С другой стороны, при управлении смещением силы реакции, соответствующем поперечной позиции, когда рассматриваемое транспортное средство находится около центра полосы движения, сила реакции, соответствующая поперечной позиции, является нулевой. Следовательно, даже около центра полосы движения, когда угол относительно вертикальной оси является большим, и скорость транспортного средства является высокой, сигнальная линия дорожной разметки достигается за короткий период времени, тогда как увеличение силы реакции при рулении с хорошим откликом является затруднительным. Напротив, при управлении смещением силы реакции, соответствующем допустимому времени отклонения, поскольку сила реакции (сила реакции, соответствующая допустимому времени отклонения) формируется в соответствии с допустимым временем отклонения, и сила реакции имеет характеристику быстрого увеличения, когда допустимое время отклонения становится равным или меньше 3 секунд, возможно подавление выезда за пределы полосы движения посредством увеличения силы реакции при рулении даже при достижении сигнальной линии дорожной разметки за короткий период времени.
Таким образом, посредством комбинирования управления смещением силы реакции, соответствующего допустимому времени отклонения, и управления смещением силы реакции, соответствующего поперечной позиции, возможно эффективное подавление выезда за пределы полосы движения при приложении устойчивой силы реакции в соответствии с расстоянием до сигнальной линии дорожной разметки. В это время, посредством использования силы реакции с большим абсолютным значением из силы реакции, соответствующей допустимому времени отклонения, и силы реакции, соответствующей поперечной позиции, возможно непрерывное приложение оптимальной требуемой силы реакции при рулении.
[0054] ПРЕИМУЩЕСТВО ПОДАВЛЕНИЯ УПРАВЛЕНИЯ СМЕЩЕНИЕМ СИЛЫ РЕАКЦИИ, КОГДА ПОТЕРЯНА СИГНАЛЬНАЯ ЛИНИЯ ДОРОЖНОЙ РАЗМЕТКИ НА ОДНОЙ СТОРОНЕ
В системе, которая непрерывно выполняет усиление при рулении в ходе движения с использованием информации из левой и правой сигнальных линий дорожной разметки полосы движения, к примеру, управление смещением силы реакции, соответствующее поперечной позиции и допустимому времени отклонения, по первому варианту осуществления, когда возникает потеря сигнальной линии дорожной разметки, при которой не может быть получена информация относительно сигнальной линии дорожной разметки, которая находится дальше от рассматриваемого транспортного средства, из левой и правой сигнальных линий дорожной разметки, требуется прерывание управления. Хотя способ логического вывода позиции сигнальной линии дорожной разметки из предыдущей ширины полосы движения для того, чтобы продолжать управление, может быть возможен в качестве альтернативного способа, на поверхности дороги, типично представляемой посредством разветвляющихся/сходящихся дорог, возникает разрегулированность между фактической шириной полосы движения и шириной полосы движения, используемой для логического вывода; как результат, точный логический вывод позиции потерянной сигнальной линии дорожной разметки является затруднительным, что приводит к тому, что этот способ является непредпочтительным.
В операции подавления управления смещением силы реакции первого варианта осуществления, когда состояние, в котором потеряна сигнальная линия дорожной разметки, которая находится дальше от рассматриваемого транспортного средства, продолжается в течение предварительно определенного времени (значение счетчика=пороговое значение), и величина смещения крутящего момента силы реакции при рулении ниже предыдущего значения, начинается операция подавления управления смещением силы реакции, и запрещается увеличение величины смещения крутящего момента силы реакции при рулении, тогда как уменьшение разрешается. Поскольку величина смещения крутящего момента силы реакции при рулении становится большим значением по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, когда водитель выполняет руление в направлении, которое приближает транспортное средство к сигнальной линии дорожной разметки, увеличивается величина смещения крутящего момента силы реакции при рулении, что также увеличивает силу реакции при рулении. В это время, водитель выполняет руление при допущении увеличения силы реакции при рулении, которая формируется посредством управления смещением силы реакции, соответствующего поперечной позиции и допустимому времени отклонения; следовательно, если увеличение величины смещения крутящего момента силы реакции при рулении запрещается в это время, то водитель испытывает неожиданную силу реакции при рулении, что вызывает дискомфорт. С другой стороны, когда завершено руление водителем таким образом, чтобы приближать транспортное средство к сигнальной линии дорожной разметки, транспортное средство направляется в центр полосы движения, так что начинает уменьшаться величина смещения крутящего момента силы реакции при рулении. В это время, водитель выполняет руление при допущении уменьшения силы реакции при рулении, которая формируется посредством управления смещением силы реакции, соответствующего поперечной позиции и допустимому времени отклонения; следовательно, даже если увеличение величины смещения крутящего момента силы реакции при рулении запрещается в это время, водитель испытывает ожидаемую силу реакции при рулении, что уменьшает дискомфорт, который вызывается у водителя.
[0055] Нижеуказанные преимущества могут быть получены в первом варианте осуществления, как описано выше.
(1) Настоящее изобретение содержит процессор 21 изображений (средство обнаружения сигнальных линий дорожной разметки) для обнаружения левой или правой сигнальной линии дорожной разметки полосы движения; модуль 36 вычисления смещения крутящего момента силы реакции при рулении (средство вычисления силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки), который, когда рассматриваемое транспортное средство приближается к одной из обнаруженных левой и правой сигнальных линий дорожной разметки, вычисляет величину смещения крутящего момента силы реакции при рулении (силу реакции при рулении для подавления приближения к сигнальной линии дорожной разметки) для подавления руления в направлении, в котором рассматриваемое транспортное средство приближается к сигнальной линии дорожной разметки, и задает величину смещения крутящего момента силы реакции при рулении большей по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки; модуль 20 управления силой реакции при рулении (средство управления силой реакции при рулении) для управления силой реакции при рулении, которая прикладывается к модулю 1 рулевого управления, который принимает ввод руления от водителя, на основе величины смещения крутящего момента силы реакции при рулении; и модуль 43 подавления управления смещением силы реакции (средство управления) для ограничения величины смещения крутящего момента силы реакции при рулении, если выполняется определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения величины смещения крутящего момента силы реакции при рулении становится равным или меньше предварительно определенного градиента увеличения.
Посредством инициирования предела на величину смещения крутящего момента силы реакции при рулении в момент времени, когда прекращается тенденция увеличения величины смещения крутящего момента силы реакции при рулении, возможно подавление отклонения силы реакции при рулении от ожидания водителя, и возможно уменьшение дискомфорта, вызываемого у водителя.
[0056] (2) Модуль 43 подавления управления смещением силы реакции ограничивает величину смещения крутящего момента силы реакции при рулении, когда величина смещения крутящего момента силы реакции при рулении ниже предыдущего значения.
Поскольку поведение транспортного средства становится ближе к поведению транспортного средства, ожидаемому водителем, посредством инициирования предела на величину смещения крутящего момента силы реакции при рулении в момент времени, когда величина смещения крутящего момента силы реакции при рулении демонстрирует тенденцию уменьшения, дополнительно может уменьшаться дискомфорт, вызываемый у водителя.
[0057] (3) Модуль 43 подавления управления смещением силы реакции запрещает увеличение величины смещения крутящего момента силы реакции при рулении и разрешает уменьшение.
Поведение транспортного средства в силу этого становится ближе к поведению транспортного средства, ожидаемому водителем, по сравнению со случаем, в котором поддерживается величина смещения крутящего момента силы реакции при рулении, и возможно дополнительное уменьшение дискомфорта, вызываемого у водителя.
[0058] (4) Модуль 43 подавления управления смещением силы реакции определяет то, что другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой, когда состояние, в котором другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой, продолжается в течение предварительно определенного времени.
Поскольку управление смещением силы реакции, соответствующее поперечной позиции и допустимому времени отклонения, за счет этого может продолжаться, когда возникает потеря сигнальной линии дорожной разметки в течение относительно короткого периода времени, к примеру, когда сигнальная линия дорожной разметки становится обнаруживаемой сразу после того, как стала необнаруживаемой, возможно подавление выезда за пределы полосы движения.
[0059] (5) Модуль 20 управления силой реакции при рулении прикладывает силу реакции при рулении к модулю 1 рулевого управления на основе задаваемой силы реакции при рулении, полученной посредством суммирования величины смещения крутящего момента силы реакции при рулении с крутящим моментом силы реакции при рулении, который получен посредством предварительно определенной характеристики силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, который действует на левое и правое передние колеса 5FL, 5FR.
Поскольку в силу этого возможно подавление изменения знака крутящего момента поворота при рулении на противоположный, когда водитель выполняет корректирующее руление, которое переходит нейтральную позицию угла поворота при рулении, возможно упрощение регулирования курса водителем в дополнение к подавлению выезда за пределы полосы движения.
[0060] (6) Модуль 1 управления содержит модуль 34a вычисления кривизны (средство вычисления кривизны), который механически отделен от поворотного модуля 2, который поворачивает левое и правое передние колеса 5FL, 5FR и обнаруживает кривизну сигнальной линии дорожной разметки; модуль 34 вычисления смещения поперечной силы (средство вычисления величины смещения) для вычисления величины смещения поперечной силы, которая больше по мере того, как возрастает обнаруженная кривизна, при этом модуль 20 управления силой реакции при рулении прикладывает силу реакции при рулении к модулю 1 рулевого управления на основе задаваемой силы реакции при рулении, полученной из стабилизирующего крутящего момента после смещения, который получен посредством вычитания величины смещения поперечной силы из стабилизирующего крутящего момента, который действует на левое и правое передние колеса 5FL, 5FR, и предварительно определенной характеристики силы реакции при рулении, соответствующая стабилизирующему крутящему моменту; модуль 36 вычисления смещения крутящего момента силы реакции при рулении не ограничивает величину смещения поперечной силы, даже когда выполняется определение в отношении того, что другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой.
Поскольку кривизна может обнаруживаться на основе либо левой, либо правой сигнальной линии дорожной разметки, на управление смещением силы реакции, соответствующее кривизне, вообще не оказывается влияние, даже если другая из левой и правой сигнальных линий дорожной разметки становится необнаруживаемой. Иными словами, возможна реализация как уменьшения нагрузки по рулению на водителя при повороте, так и упрощения регулирования курса посредством продолжения управления смещением силы реакции, соответствующего кривизне.
[0061] (7) Когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки, вычисляется величина смещения крутящего момента силы реакции при рулении, которая увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки; при приложении силы реакции при рулении к модулю 1 рулевого управления, который принимает ввод руления от водителя на основе величины смещения крутящего момента силы реакции при рулении, если выполняется определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения величины смещения крутящего момента силы реакции при рулении становится равным или меньше предварительно определенного градиента увеличения, величина смещения крутящего момента силы реакции при рулении ограничивается.
Посредством инициирования предела на величину смещения крутящего момента силы реакции при рулении в момент времени, когда прекращается тенденция увеличения величины смещения крутящего момента силы реакции при рулении, возможно подавление отклонения силы реакции при рулении от ожидания водителя, и может уменьшаться дискомфорт, вызываемый у водителя.
[0062] (8) Настоящее изобретение содержит процессор 21 изображений (датчик) для обнаружения левой или правой сигнальной линии дорожной разметки полосы движения и величины 20 смещения крутящего момента поворота при рулении (контроллер), в котором когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки, вычисляется величина смещения крутящего момента силы реакции при рулении, которая увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки; при приложении силы реакции при рулении к модулю 1 рулевого управления, который принимает ввод руления от водителя на основе величины смещения крутящего момента силы реакции при рулении, если выполняется определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения величины смещения крутящего момента силы реакции при рулении становится равным или меньше предварительно определенного градиента увеличения, величина смещения крутящего момента силы реакции при рулении ограничивается.
Посредством инициирования предела на величину смещения крутящего момента силы реакции при рулении в момент времени, когда прекращается тенденция увеличения величины смещения крутящего момента силы реакции при рулении, возможно подавление отклонения силы реакции при рулении от ожидания водителя, и может уменьшаться дискомфорт, вызываемый у водителя.
[0063] ВАРИАНТ 2 ОСУЩЕСТВЛЕНИЯ
ФИГ. 21 является системным видом, иллюстрирующим систему рулевого управления транспортного средства второго варианта осуществления. Частям, общим с первым вариантом осуществления, присвоены идентичные названия и ссылочные позиции, и их пояснения опущены.
Устройство рулевого управления второго варианта осуществления, главным образом, сконфигурировано посредством модуля 1 рулевого управления, поворотного модуля 2 и EPS-контроллера 25, и модуль 1 рулевого управления, который принимает ввод руления от водителя, и поворотный модуль 2, который поворачивает левое и правое колеса 5FL, 5FR (поворотные колеса), механически зацепляются.
Модуль 1 рулевого управления содержит руль 6, вал 7 рулевой колонки и датчик 26 крутящего момента.
Датчик 26 крутящего момента обнаруживает крутящий момент поворота при рулении водителем, который вводится из руля 6 на вал 7 рулевой колонки.
Поворотный модуль 2 содержит вал 11 шестерни, рулевую передачу 12 и электромотор 27 усилителя рулевого управления.
Вал 11 шестерни соединяется с валом 7 рулевой колонки через торсионный вал датчика 26 крутящего момента.
Электромотор 27 усилителя рулевого управления, например, представляет собой бесщеточный электромотор, в котором выходной вал соединяется с шестерней 15 зубчатой рейки через непроиллюстрированный замедлитель, и выводит вспомогательный крутящий момент для повышения силы поворота при рулении водителем в зубчатую рейку 16 в ответ на команду из EPS-контроллера 25.
[0064] Скорость транспортного средства (скорость кузова транспортного средства), обнаруженная посредством изображения проезжей дороги впереди рассматриваемого транспортного средства, захваченного посредством камеры 17 и датчика 18 скорости транспортного средства, в дополнение к вышеописанному датчику 26 крутящего момента, вводится в EPS-контроллер 25.
EPS-контроллер 25 содержит модуль 28 управления вспомогательным крутящим моментом (средство управления вспомогательным крутящим моментом, контроллер) и процессор 21 изображений.
Модуль 28 управления вспомогательным крутящим моментом формирует задаваемый вспомогательный крутящий момент на основе каждого фрагмента входной информации и выводит сформированный задаваемый вспомогательный крутящий момент в формирователь 29 сигналов управления электрического тока.
Формирователь 29 сигналов управления электрического тока управляет задаваемым электрическим током в электромотор 27 усилителя рулевого управления с обратной связью по крутящему моменту, которая сопоставляет фактический вспомогательный крутящий момент, который логически выводится из значения тока электромотора 27 усилителя рулевого управления, с задаваемым вспомогательным крутящим моментом.
Процессор 21 изображений распознает левую и правую сигнальные линии дорожной разметки полосы движения (разделительные линии проезжаемого пути) посредством обработки изображений, к примеру, посредством извлечения краев из изображения проезжаемого пути впереди рассматриваемого транспортного средства, захваченного посредством камеры 17.
[0065] МОДУЛЬ УПРАВЛЕНИЯ ВСПОМОГАТЕЛЬНЫМ КРУТЯЩИМ МОМЕНТОМ
ФИГ. 22 является блок-схемой управления модуля 28 управления вспомогательным крутящим моментом.
Модуль 41 вычисления вспомогательного крутящего момента вычисляет вспомогательный крутящий момент в отношении карты вспомогательного крутящего момента, которая задается заранее, на основе крутящего момента поворота при рулении и скорости транспортного средства. Характеристика вспомогательного крутящего момента в карте вспомогательного крутящего момента имеет характеристику увеличения по мере того, как увеличивается абсолютное значение крутящего момента поворота при рулении, или по мере того, как снижается скорость транспортного средства.
Модуль 42 вычисления смещения вспомогательного крутящего момента вычисляет величину смещения вспомогательного крутящего момента для смещения характеристики вспомогательного крутящего момента при управлении смещением вспомогательного крутящего момента, соответствующем поперечной позиции или допустимому времени отклонения, на основе скорости транспортного средства и изображения проезжаемого пути впереди рассматриваемого транспортного средства. Ниже описываются подробности модуля 42 вычисления смещения вспомогательного крутящего момента.
Модуль 28a вычитания выводит значение, полученное посредством вычитания величины смещения вспомогательного крутящего момента из вспомогательного крутящего момента, в формирователь 29 сигналов управления электрического тока в качестве конечного задаваемого вспомогательного крутящего момента.
МОДУЛЬ ВЫЧИСЛЕНИЯ СМЕЩЕНИЯ ВСПОМОГАТЕЛЬНОГО КРУТЯЩЕГО МОМЕНТА
[0066] Фиг. 23 является блок-схемой управления модуля 42 вычисления смещения вспомогательного крутящего момента.
Модуль 42c выбора силы реакции выбирает силу реакции с большим абсолютным значением из силы реакции, соответствующей допустимому времени отклонения, и силы реакции, соответствующей поперечной позиции, в качестве величины смещения вспомогательного крутящего момента.
Модуль 44 подавления управления смещением вспомогательного крутящего момента содержит счетчик 44a и модуль 44b ограничения величины смещения вспомогательного крутящего момента.
Когда сигнальная линия дорожной разметки дальше от рассматриваемого транспортного средства из левой и правой сигнальных линий дорожной разметки становится необнаруживаемой, счетчик 44a начинает подсчет; когда значение счетчика достигает порогового значения, сбрасывается значение счетчика (=0), и задается флаг подавления управления смещением вспомогательного крутящего момента (=1). Флаг подавления управления смещением вспомогательного крутящего момента сбрасывается (=0), когда сигнальная линия дорожной разметки становится необнаруживаемой.
Модуль 44b ограничения величины смещения вспомогательного крутящего момента начинает операцию подавления управления смещением вспомогательного крутящего момента, когда задается флаг подавления управления смещением вспомогательного крутящего момента, и величина смещения вспомогательного крутящего момента ниже предыдущего значения. В операции подавления управления смещением вспомогательного крутящего момента, величина смещения вспомогательного крутящего момента ограничивается. В частности, когда величина смещения вспомогательного крутящего момента превышает предыдущее значение, предыдущее значение выводится в качестве величины смещения вспомогательного крутящего момента, и текущее значение выводится, когда оно равно или больше предыдущего значения.
[0067] ПРЕИМУЩЕСТВО УПРАВЛЕНИЯ СМЕЩЕНИЕМ ВСПОМОГАТЕЛЬНОГО КРУТЯЩЕГО МОМЕНТА, КОГДА ПОТЕРЯНА СИГНАЛЬНАЯ ЛИНИЯ ДОРОЖНОЙ РАЗМЕТКИ НА ОДНОЙ СТОРОНЕ
В процессе подавления управления смещением вспомогательного крутящего момента второго варианта осуществления, когда состояние, в котором потеряна сигнальная линия дорожной разметки, которая находится дальше от рассматриваемого транспортного средства, продолжается в течение предварительно определенного времени (значение счетчика=пороговое значение), и величина смещения вспомогательного крутящего момента ниже предыдущего значения, начинается операция подавления управления смещением вспомогательного крутящего момента, и запрещается увеличение величины смещения вспомогательного крутящего момента, тогда как уменьшение разрешается. Поскольку величина смещения вспомогательного крутящего момента становится большим значением по мере того, как сокращается расстояние до сигнальной линии дорожной разметки, когда водитель выполняет руление в направлении, которое приближает транспортное средство к сигнальной линии дорожной разметки, увеличивается величина смещения вспомогательного крутящего момента, что также увеличивает силу реакции при рулении. В это время, водитель выполняет руление при допущении увеличения силы реакции при рулении, которая формируется посредством управления смещением вспомогательного крутящего момента, соответствующего поперечной позиции и допустимому времени отклонения; как результат, если увеличение величины смещения вспомогательного крутящего момента запрещается в это время, то результат должен представлять собой неожиданную силу реакции при рулении для водителя, что вызывает дискомфорт. С другой стороны, когда завершено руление водителем таким образом, чтобы приближать транспортное средство к сигнальной линии дорожной разметки, транспортное средство направляется в центр полосы движения, так что начинает уменьшаться величина смещения вспомогательного крутящего момента. В это время, водитель выполняет руление при допущении уменьшения силы реакции при рулении, которая формируется посредством управления смещением вспомогательного крутящего момента, соответствующего поперечной позиции и допустимому времени отклонения; как результат, даже если увеличение величины смещения вспомогательного крутящего момента запрещается в это время, то результат должен представлять собой ожидаемую силу реакции при рулении водителем, что уменьшает дискомфорт, который вызывается у водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2636636C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |
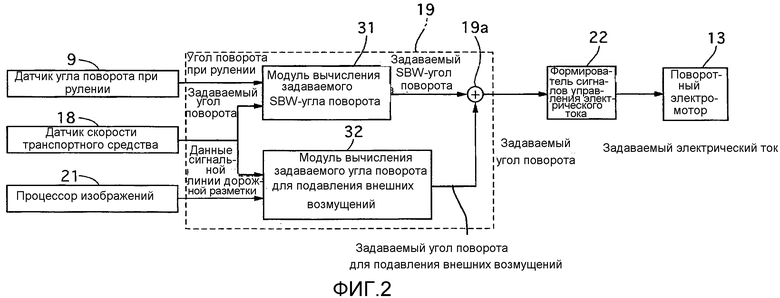
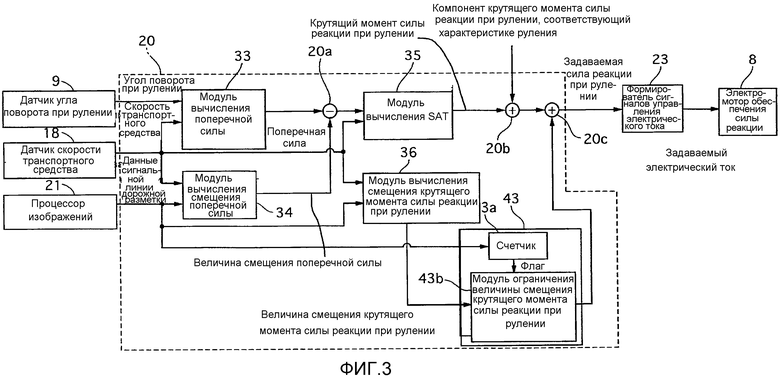
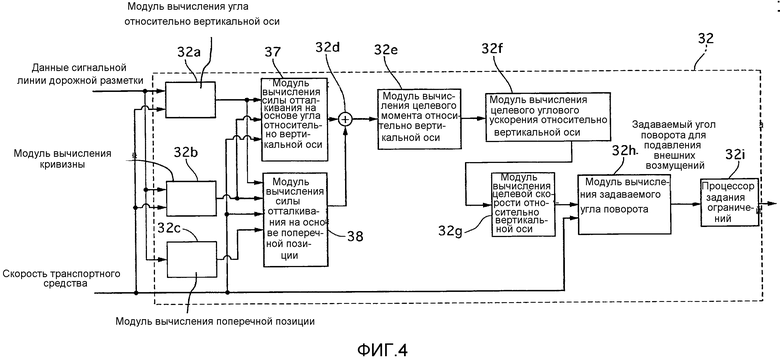
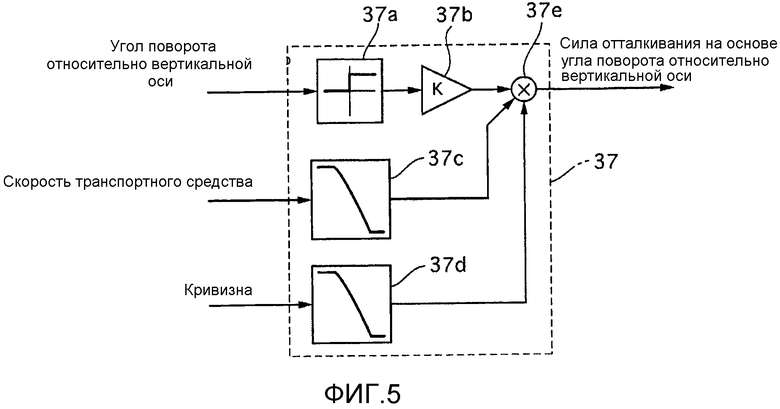
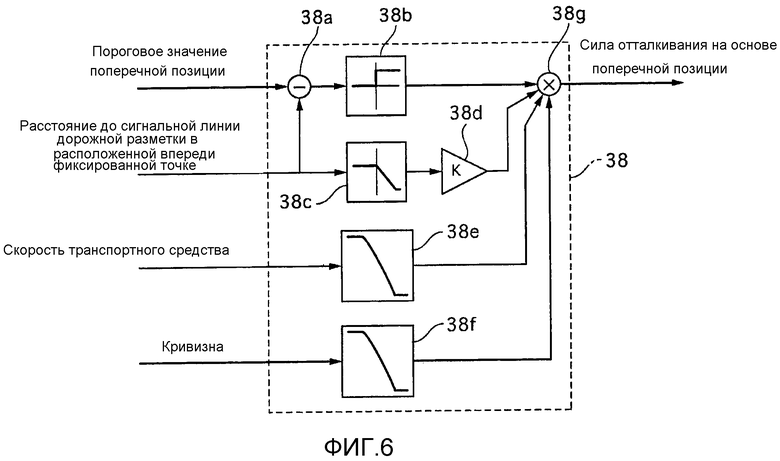
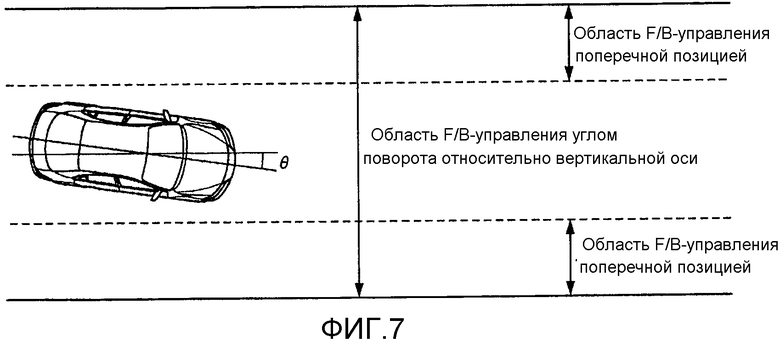
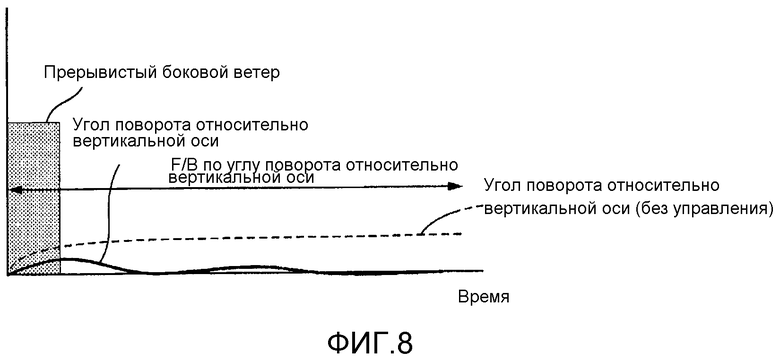
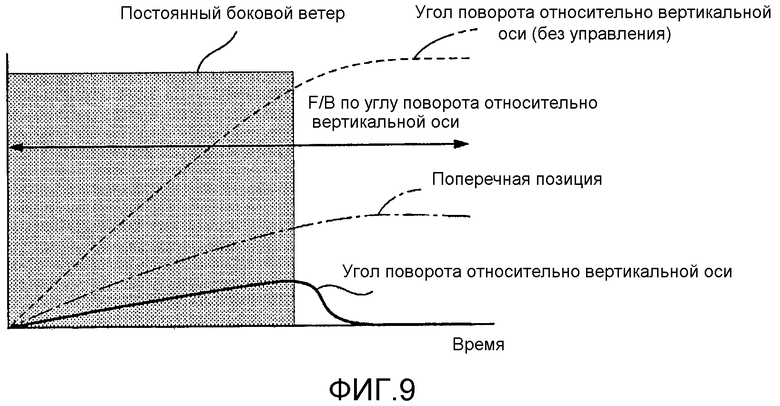
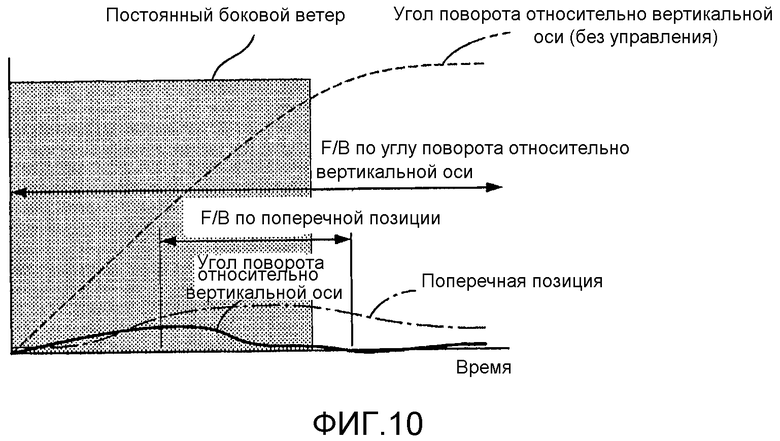
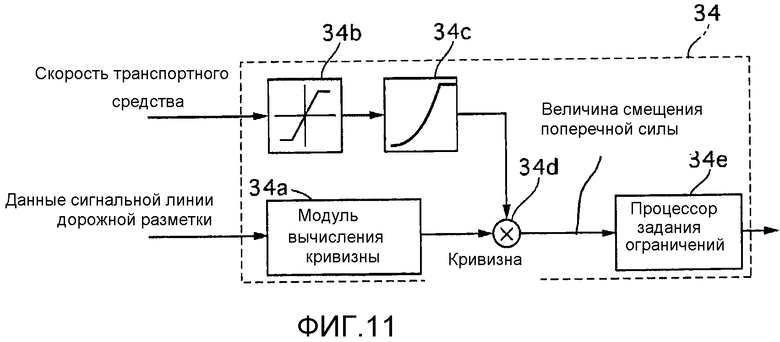
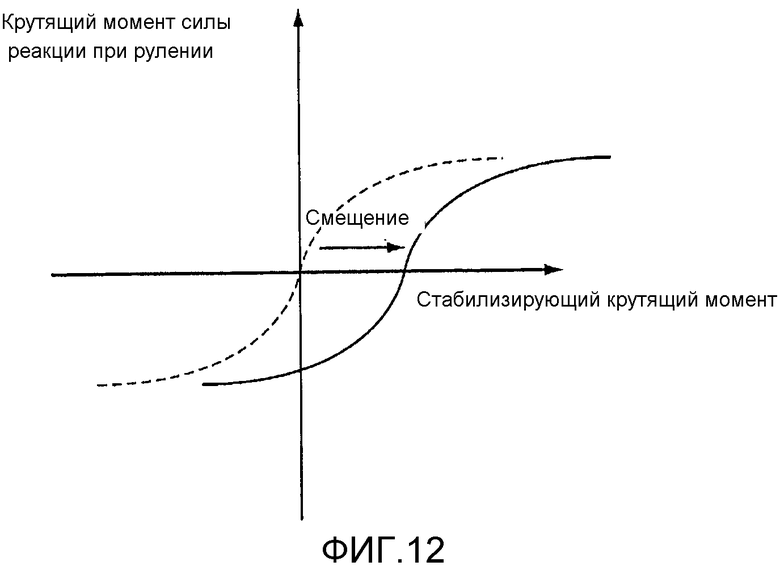
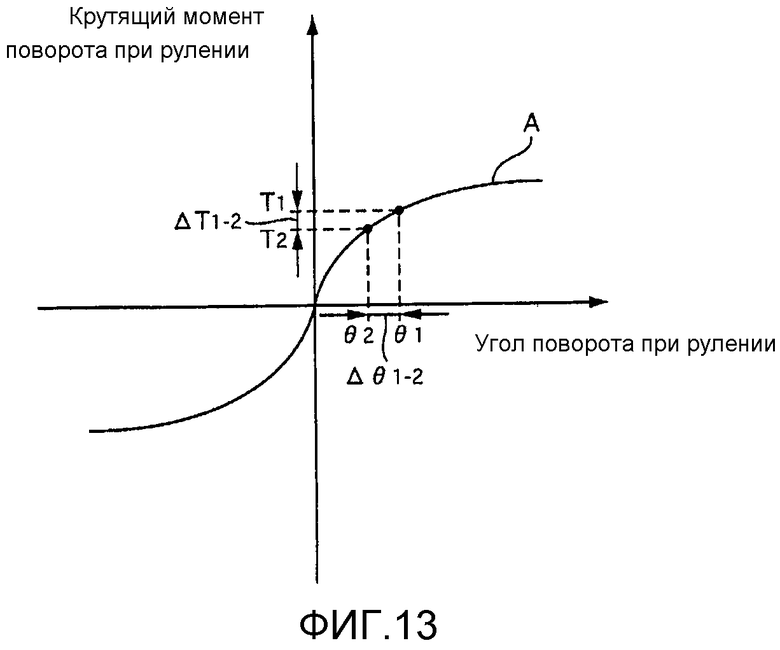
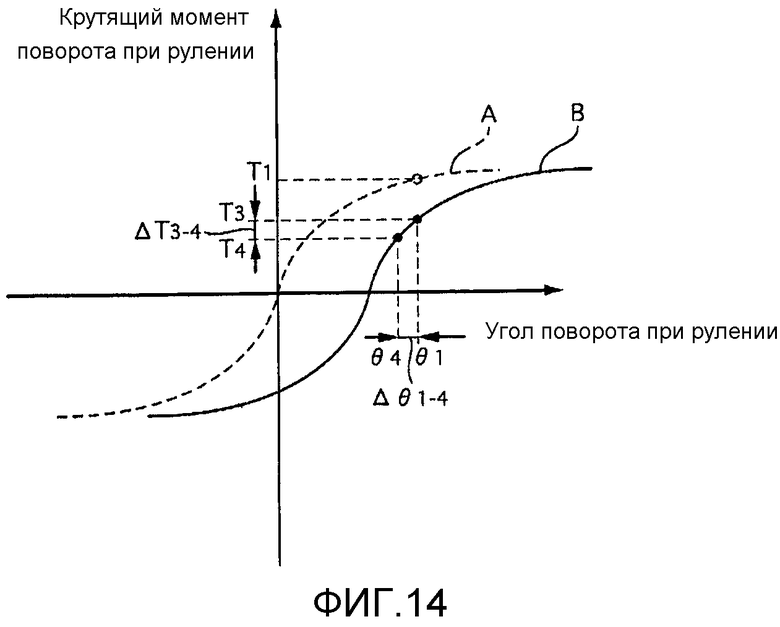
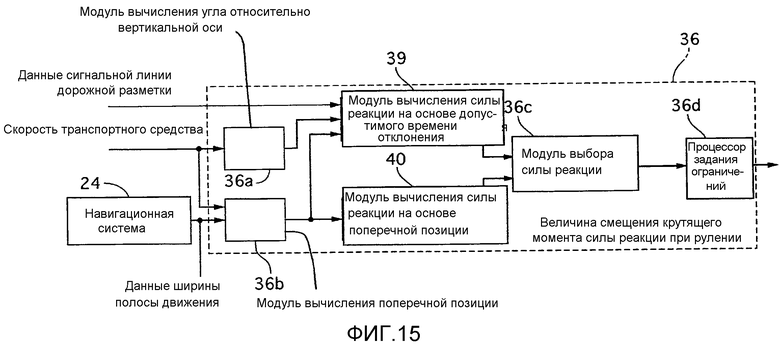
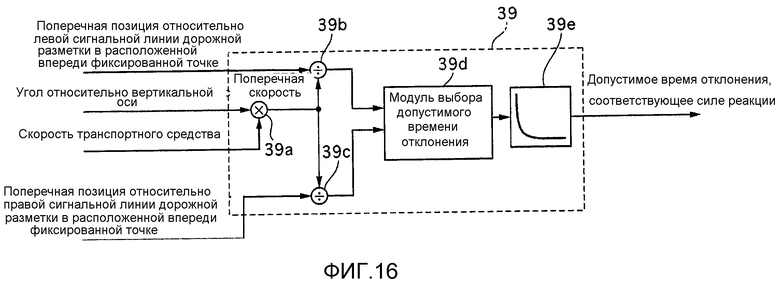
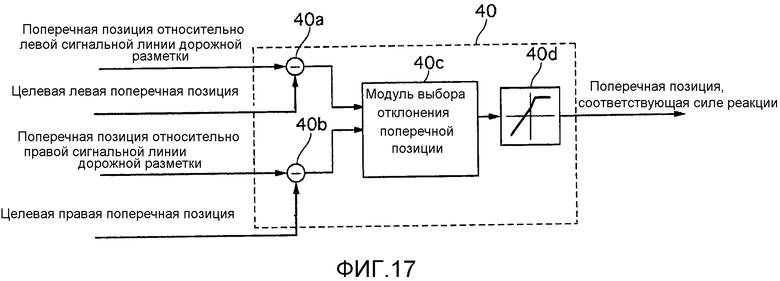
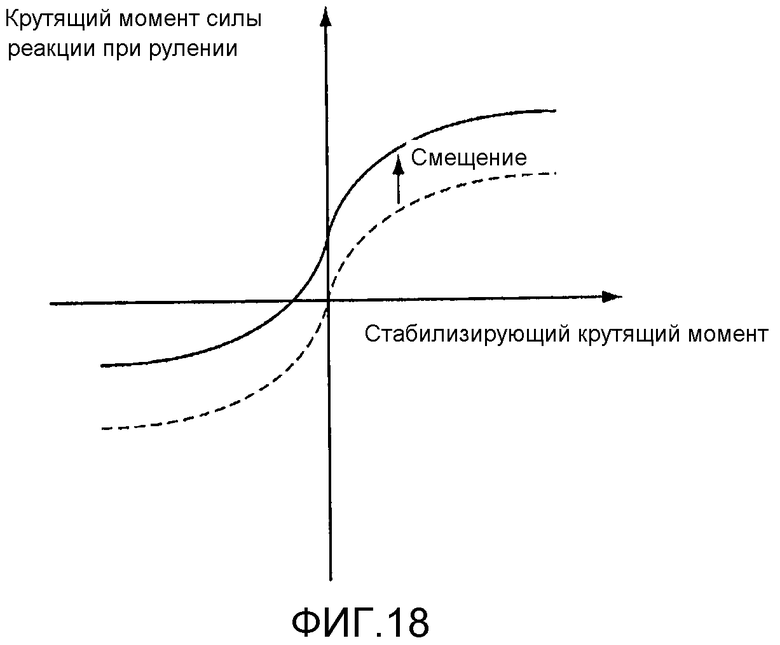
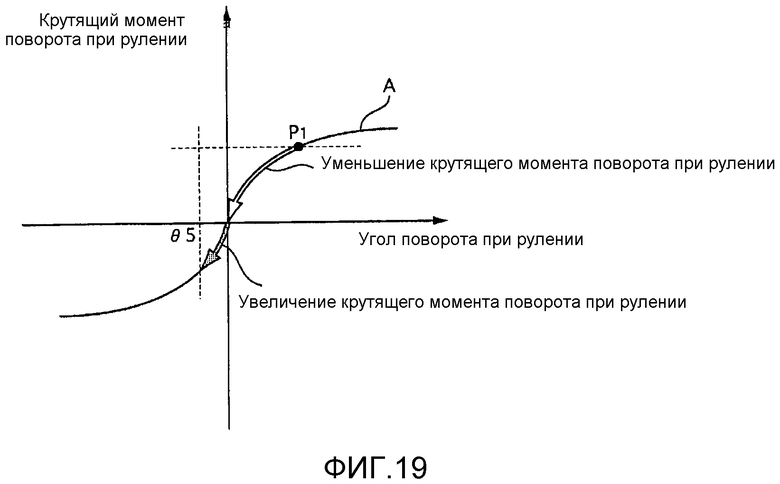
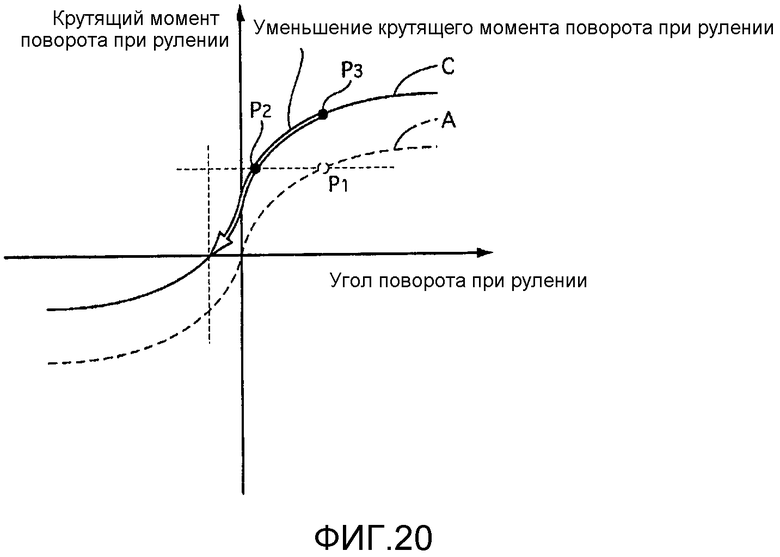
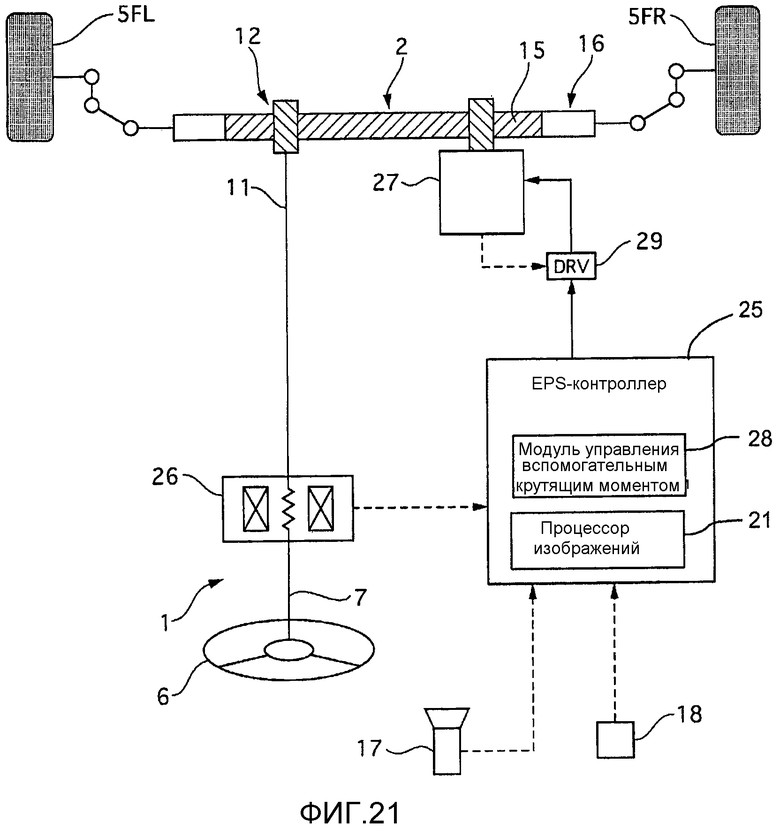
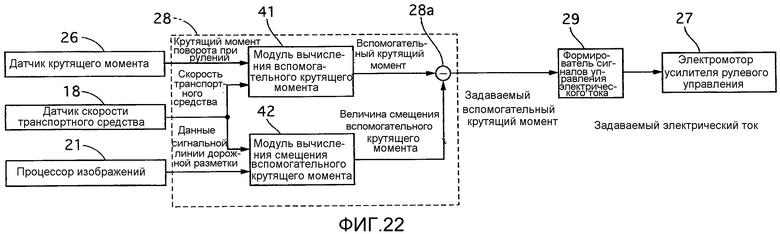
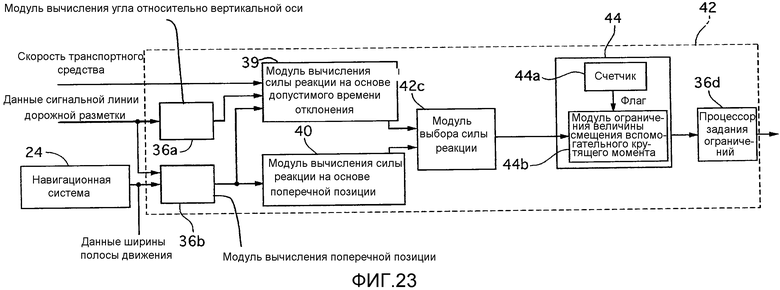
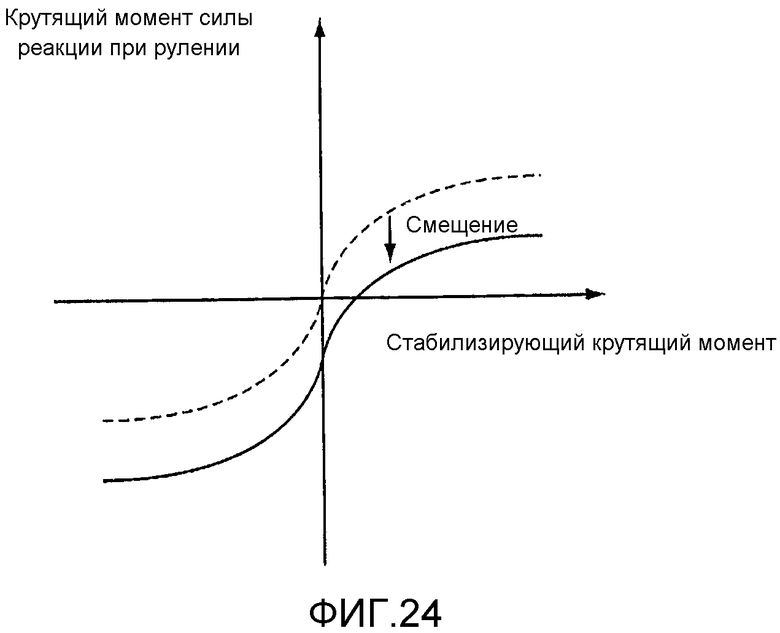
Рассмотрено устройство управления рулением. Когда транспортное средство приближается либо к левой, либо к правой сигнальной линии дорожной разметки, вычисляется величина смещения крутящего момента силы реакции при рулении. Сила реакции увеличивается по мере сокращения расстояния между транспортным средством и сигнальной линией дорожной разметки. При приложении силы реакции при рулении к модулю рулевого управления, на основе величины смещения крутящего момента силы реакции при рулении, если определено, что не может быть обнаружена левая или правая сигнальная линия дорожной разметки и градиент увеличения величины смещения крутящего момента силы реакции при рулении становится равным или меньше предварительно определенного градиента увеличения, величина смещения крутящего момента силы реакции при рулении ограничивается. Достигается уменьшение дискомфорта вызываемого у водителя. 3 н. и 5 з.п. ф-лы, 24 ил.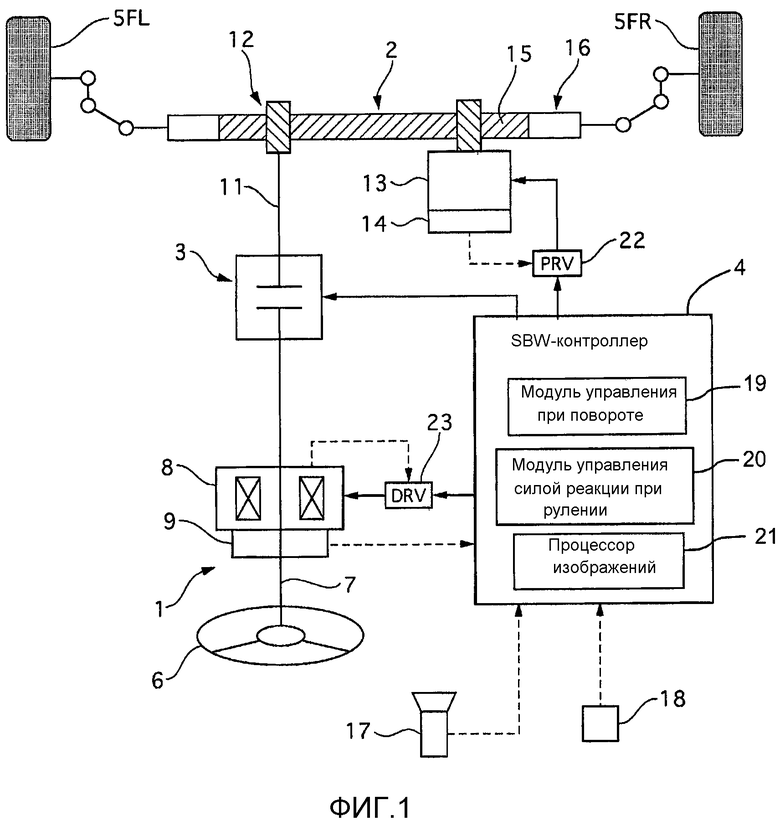
1. Устройство управления рулением, отличающееся тем, что оно содержит:
средство обнаружения сигнальных линий дорожной разметки для обнаружения левой или правой сигнальной линии дорожной разметки полосы движения;
средство вычисления силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки для вычисления силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, которая подавляет руление в направлении, в котором рассматриваемое транспортное средство приближается к сигнальной линии дорожной разметки таким образом, что сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки, когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки,
средство управления силой реакции при рулении для управления силой реакции при рулении, приложенной к модулю рулевого управления, который принимает ввод руления от водителя, на основе силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки; и
средство ограничения для ограничения силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, когда выполнено определение в отношении того, что другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой, и градиент увеличения силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки становится равным или меньше предварительно определенного градиента увеличения.
2. Устройство управления рулением по п. 1, в котором:
средство ограничения ограничивает силу реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, когда сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки ниже предыдущего значения.
3. Устройство управления рулением по п. 1 или 2, в котором:
средство ограничения запрещает увеличение силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки при разрешении уменьшения.
4. Устройство управления рулением по п. 1, в котором:
средство ограничения, которое определяет то, что другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой, когда состояние, в котором другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой, продолжается в течение предварительно определенного времени.
5. Устройство управления рулением по п. 1, в котором:
средство управления силой реакции при рулении прикладывает силу реакции при рулении к модулю рулевого управления на основе задаваемой силы реакции при рулении, полученной посредством суммирования силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки с силой реакции при рулении, которая получена из предварительно определенной характеристики силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, который действует на поворотное колесо.
6. Устройство управления рулением по п. 1, в котором:
модуль рулевого управления механически отделен от поворотного модуля для поворота поворотного колеса, и содержащее:
средство обнаружения кривизны для обнаружения кривизны сигнальной линии дорожной разметки; и
средство вычисления величины смещения для вычисления величины смещения, которое больше по мере того, как возрастает обнаруженная кривизна;
при этом:
средство управления силой реакции при рулении прикладывает силу реакции при рулении к модулю рулевого управления на основе задаваемой силы реакции при рулении, полученной из стабилизирующего крутящего момента после смещения, который получен посредством вычитания величины смещения из стабилизирующего крутящего момента, который действует на поворотное колесо, и предварительно определенной характеристики силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, и
средство ограничения не ограничивает величину смещения, даже когда выполнено определение в отношении того, что другая из левой и правой сигнальных линий дорожной разметки является необнаруживаемой.
7. Устройство управления рулением, в котором когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки, вычисляется сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, которая увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки, и при приложении силы реакции при рулении к модулю рулевого управления, который принимает ввод руления от водителя, на основе силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, если выполнено определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки становится равным или меньше предварительно определенного градиента увеличения, то сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки ограничивается.
8. Устройство управления рулением, отличающееся тем, что оно содержит:
датчик для обнаружения левой или правой сигнальной линии дорожной разметки полосы движения; и
контроллер, который вычисляет силу реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, которая увеличивается по мере того, как сокращается расстояние между рассматриваемым транспортным средством и сигнальной линией дорожной разметки, когда рассматриваемое транспортное средство приближается к либо левой, либо правой сигнальной линии дорожной разметки, и при приложении силы реакции при рулении к модулю рулевого управления, который принимает ввод руления от водителя, на основе силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки, и если выполнено определение в отношении того, что не может быть обнаружена другая из левой и правой сигнальных линий дорожной разметки, и градиент увеличения силы реакции при рулении для подавления приближения к сигнальной линии дорожной разметки становится равным или меньше предварительно определенного градиента увеличения, то сила реакции при рулении для подавления приближения к сигнальной линии дорожной разметки ограничивается.
| JP 201030504 A, 12.02.2010 | |||
| JP 200340132 A, 13.02.2003 | |||
| JP 10273062 A, 13.10.1998 | |||
| Рабочий аппарат к хлопкоуборочной машине пневматического действия | 1951 |
|
SU96822A1 |

