Настоящее изобретение относится к способу и системе для определения высоты поверхности столба жидкости над датчиком. Способ может быть использован, например, при сборе морских сейсмических данных.
Сбор морских сейсмических данных можно осуществлять с помощью сейсморазведочного судна, буксирующего сейсмический источник и/или одну или несколько приборных кос с заключенными в них датчиками. При обычной морской сейсморазведке эти приборные косы, называемые также морскими буксируемыми косами (сейсморазведочными кабелями), буксируют приблизительно горизонтально на глубине между около 5 и около 50 м.
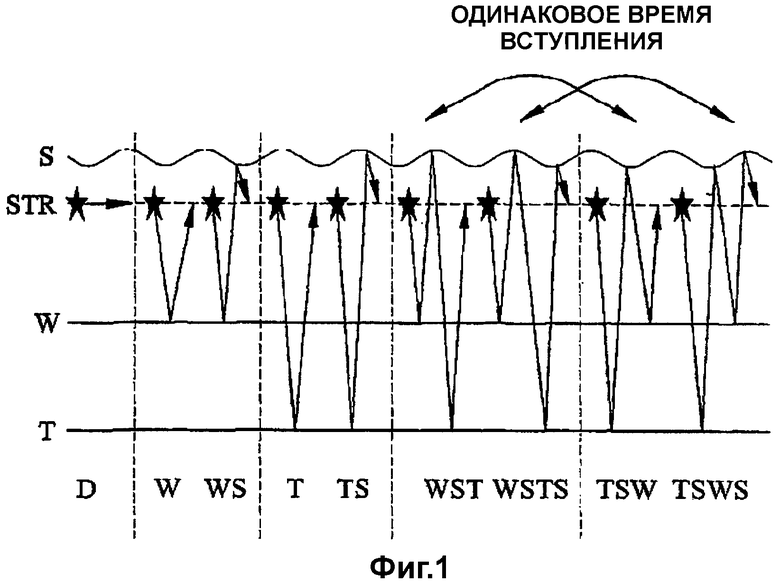
На фиг.1 приведена схема, на которой показаны различные сейсмические явления (волны), которые можно наблюдать с помощью буксируемой косы "STR" и регистрировать в виде сейсмограммы. Эти волны показаны и обозначены в соответствии с рядом границ разделов, на которых они отражаются, при этом указанные границы раздела обозначены как "S" для поверхности бурного моря, как "W" для дна моря и как "T" для отражающего горизонта объекта разведки. Звездочками показаны сейсмические источники, а кончиками стрелок показаны направления распространения сейсмической волны возле приемников. Волны, отнесенные к "S", отражаются от поверхности бурного моря и называются волнами-спутниками.
Волны-спутники представляют собой нежелательные источники возмущений, которые влияют на характеристику приемника и форму сигнала источника, тем самым затрудняя интерпретацию желательных восходящих отражений от нижнего горизонта грунта.
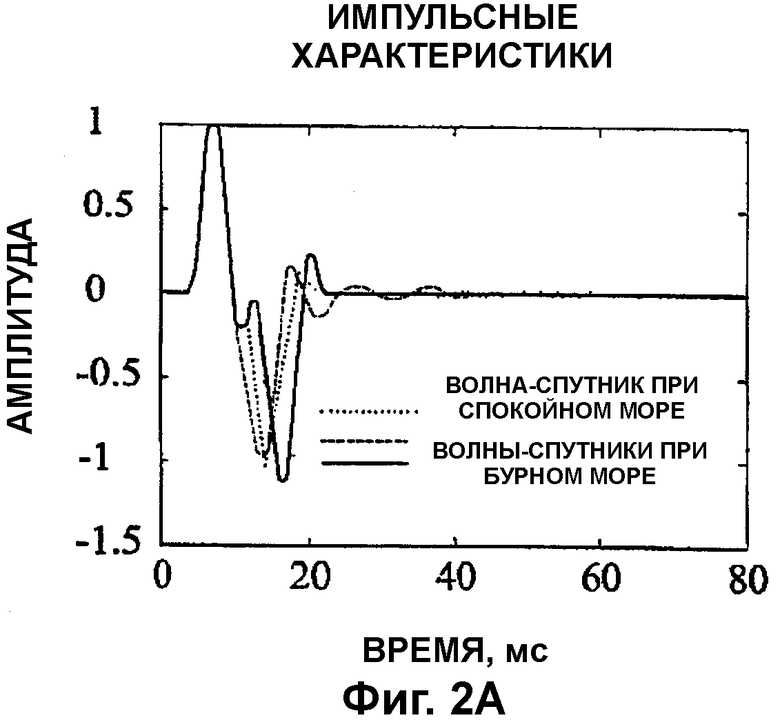
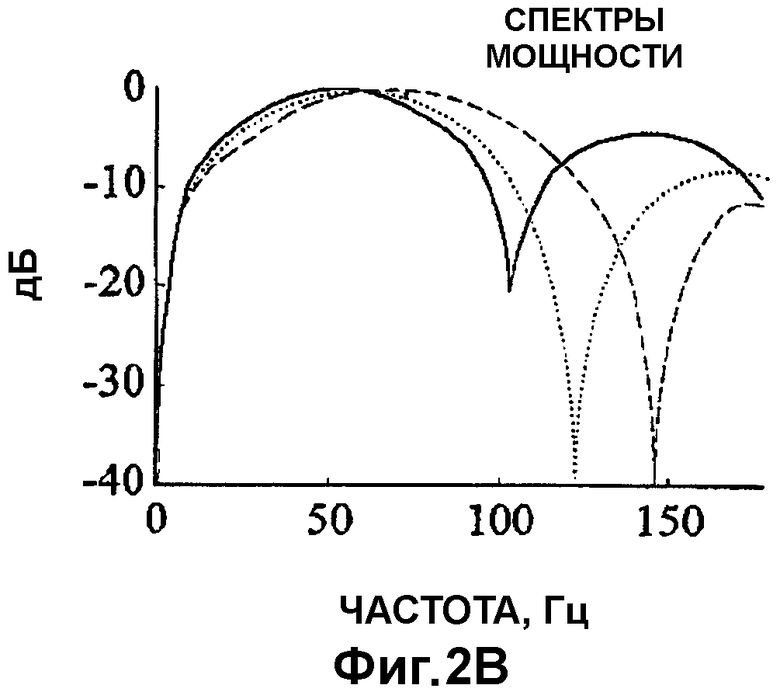
Действие бурного моря заключается в искажении амплитуды и времени вступления волны-спутника, отраженной от поверхности моря, и в добавлении размытой заключительной части или хвостовой части к сигналу волны-спутника. На каждой из фиг.2А и 2В приведены две типичные импульсные характеристики для бурного моря и импульсная характеристика для спокойного моря. Эти характеристики, полученные моделированием, рассчитывались для одной точки, расположенной на номинальной 6-метровой глубине ниже среднего уровня моря. На одной характеристике для бурного моря наблюдается увеличение как времени вступления волны-спутника, так и амплитуды. На другой характеристике наблюдается уменьшение значений этих параметров. Кроме того, искажена форма импульса. Хвостовая заключительная часть наблюдается в более поздние моменты времени вследствие наличия энергии, рассеянной от наиболее удаленных частей поверхности, что приводит к возрастанию пульсаций амплитуды на спектральных характеристиках. Неравномерность амплитудно-частотной характеристики в диапазоне частот 10-80 Гц может быть существенным источником погрешности.
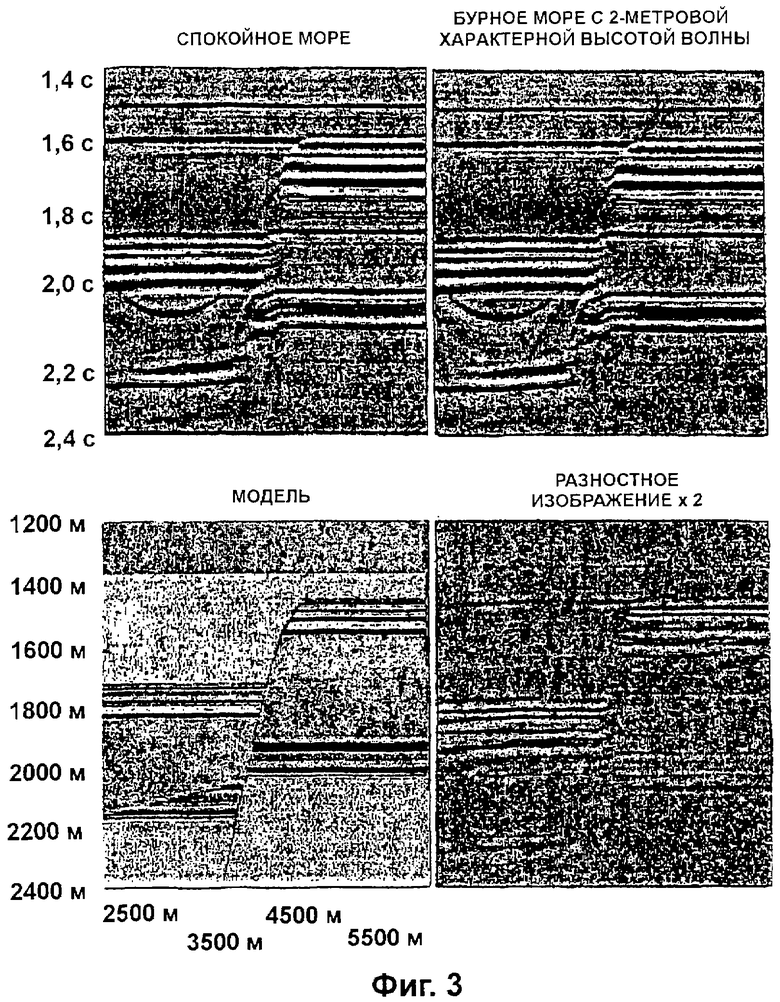
На фиг.3 представлены результаты моделирования, которые показывают, насколько влияние бурного моря может ухудшить сейсмическое изображение. На нем также показано, что это ухудшение может быть значительным, особенно в случае периодических исследований, когда сейсмические изображения получают в различные моменты времени, например, с промежутками в один год, особенно для оценки изменения уровня нефти в коллекторе. На информационном табло внизу слева показан участок модели подземной среды. На информационном табло наверху слева представлены сейсмические данные, которые получены на основании этой модели в случае спокойного моря, а на информационном табло наверху справа представлены данные, которые получены на основании указанной модели для бурного моря при 2-метровой характерной высоте волны в случае исследования после перерыва. Наконец, на информационном табло снизу справа показано разностное изображение, полученное из этих двух изображений при умножении на коэффициент 2, основанием для введения которого является неспокойное состояние моря. Ясно видно, что действие бурного моря может ухудшить сейсмическое изображение, и что это ухудшение может быть значительным и может маскировать истинное разностное изображение.
В различных патентных заявках описаны способы для коррекции или ослабления влияния состояния моря на сейсмические данные. В частности, такие способы раскрыты в Международных заявках, опубликованных под номерами WO 00/57206 и WO 00/57207. Обычно сейсмические сигналы, принимаемые сейсмическими датчиками, фильтруются до регистрации, так что данные ниже частоты около 3 Гц исключаются. В некоторых способах учета волн-спутников необходимо знание высоты поверхности моря в зависимости от времени над каждым источником или приемником. В таком случае конфигурацию поверхности моря на расстоянии от датчика экстраполируют. Эта экстраполяция может быть осуществлена просто с помощью плоскости, проходящей через измеренную высоту, или может быть более сложной. Все же в этих способах, известных из уровня техники, не описано, каким образом высота поверхности моря может быть измерена, в частности, при использовании морских буксируемых кос.
С учетом вышеизложенного одна проблема, которую предлагается решить с помощью изобретения, заключается в создании усовершенствованного способа для определения высоты поверхности столба жидкости.
Предложенное решение вышеуказанной проблемы изложено в пункте 1 формулы изобретения.
Изменяющаяся во времени конфигурация поверхности моря вызывает возрастание волн давления, и эти поверхностные волны давления охватывают частотный диапазон, заключенный между примерно 0,03 и 0,5 Гц. Однако из-за перемещения датчиков относительно волн указанный частотный диапазон расширяется до примерно от 0,03 до 1 Гц вследствие доплеровского эффекта. В соответствии с изобретением данные в частотном диапазоне 0,03-1 Гц не только принимают и собирают с помощью датчиков, но также и регистрируют, и обрабатывают для получения оценки возвышения поверхности моря над каждым датчиком.
Дополнительные аспекты и предпочтительные признаки изобретения определены в других пунктах формулы изобретения.
Изобретение станет более понятным в свете нижеследующего описания не создающих ограничения и иллюстративных вариантов реализации изобретения, представленного со ссылками на сопровождающие чертежи, на которых:
фиг.1 - схема, показывающая различные волны, которые могут быть приняты с помощью датчиков буксируемой косы;
фиг.2А и 2В - диаграммы типичных возмущений, обусловленных бурным морем, показанные в сравнении с диаграммами для спокойного моря;
фиг.3 - модель и три сейсмических изображения, полученные из указанной модели, которые иллюстрируют ухудшающее действие бурного моря;
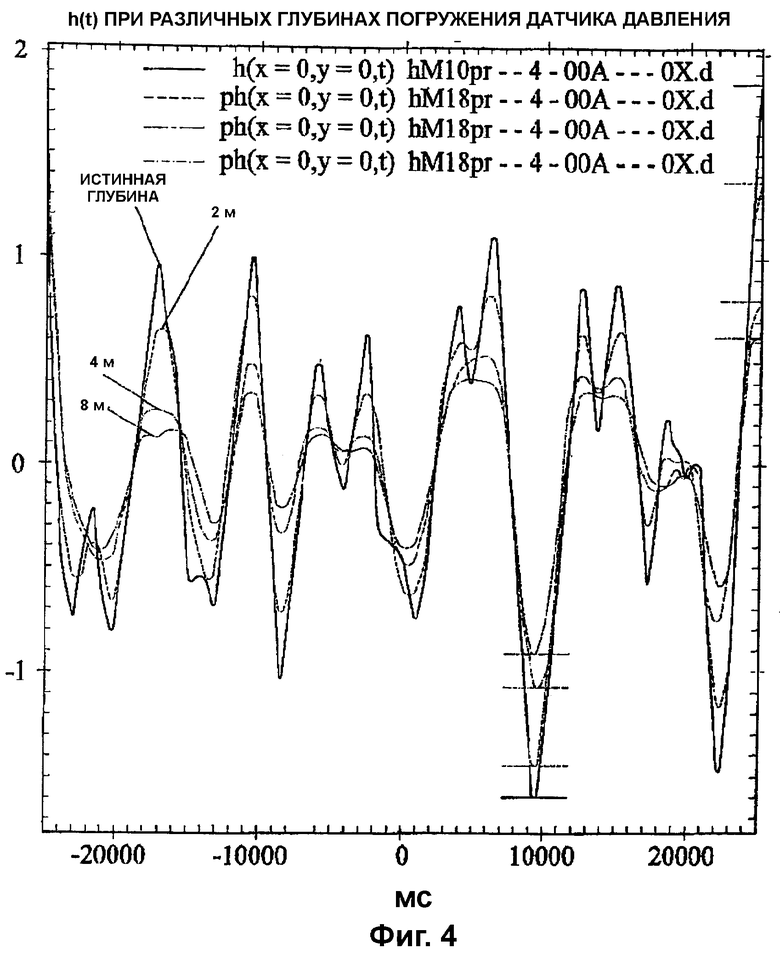
фиг.4 - диаграмма, иллюстрирующая эффект сглаживания при различных глубинах погружения датчиков;
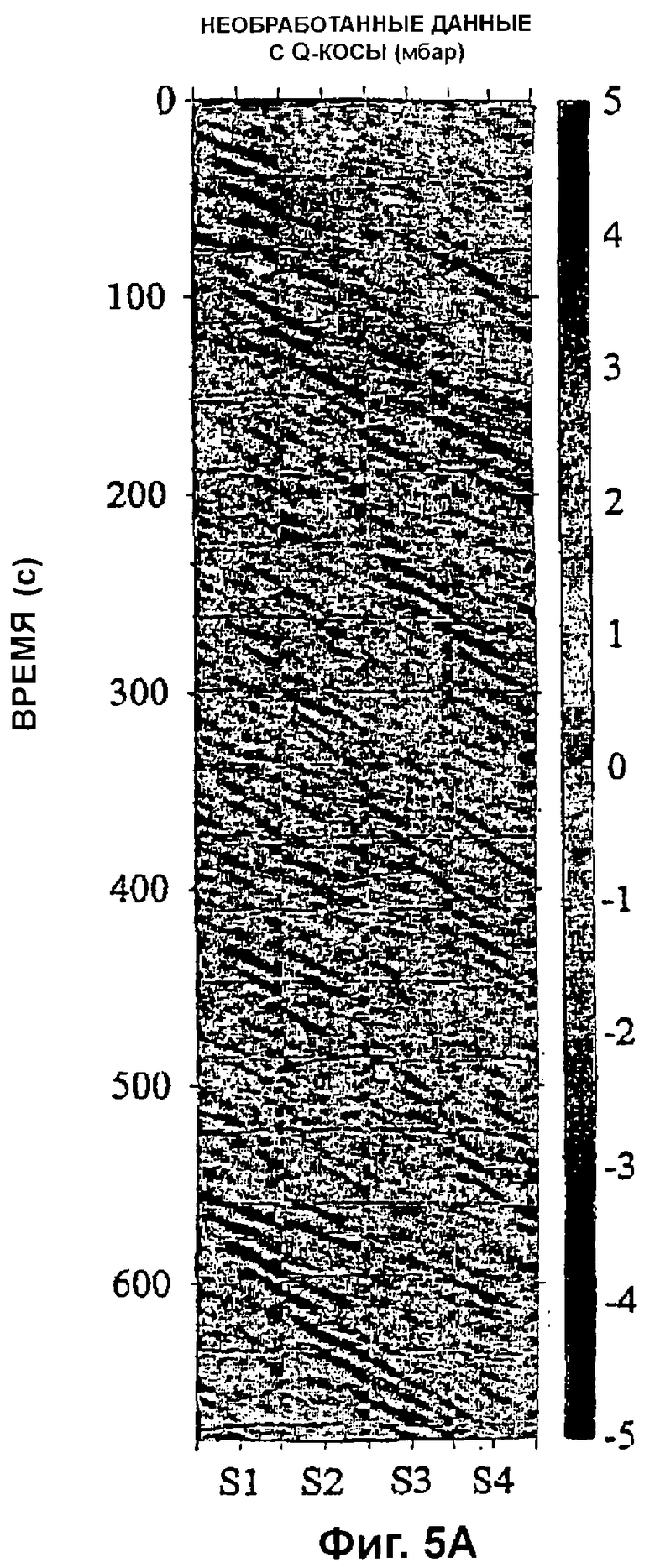
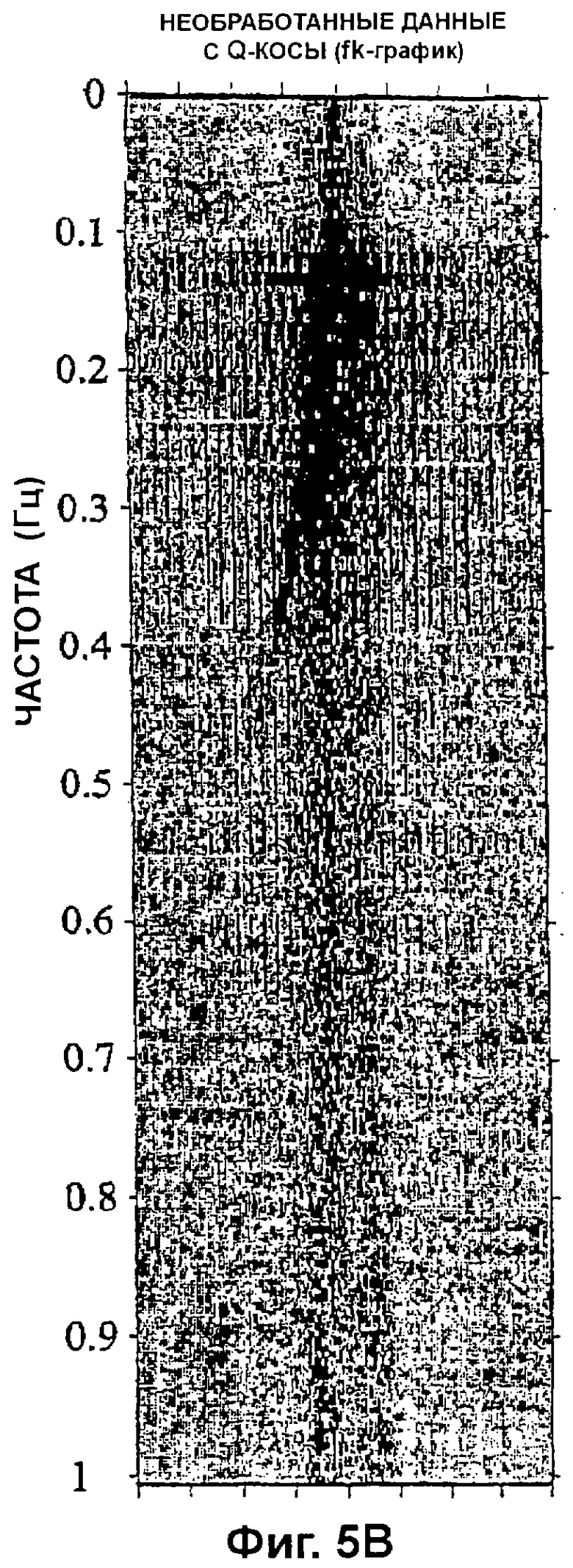
фиг.5А и 5В - изображения необработанных данных, которые могут быть получены и зарегистрированы в соответствии с изобретением с помощью косы "Q";
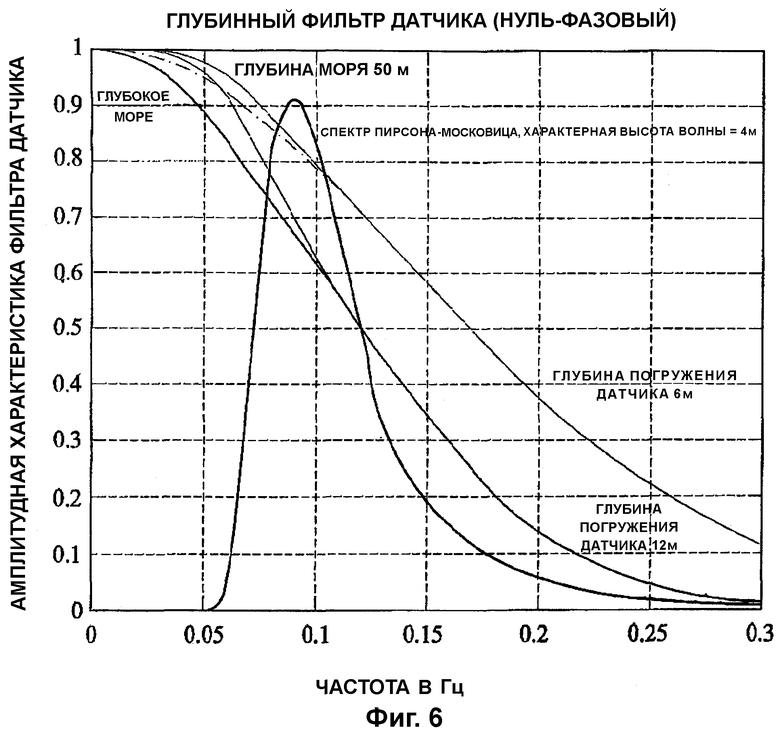
фиг.6 - характеристики глубинного фильтра для двух различных глубин погружения датчиков и двух различных глубин моря и сравнение этих характеристик со спектром Пирсона-Московица для случая 4-метровой характерной высоты волны;
фиг.7 - структурная схема устройства согласно изобретению; и
фиг.8 - размещение сейсмической исследовательской установки согласно изобретению.
Изобретение будет описано применительно к варианту реализации изобретения, в котором множество датчиков давления, чувствительных в частотном диапазоне от 0,03 до 1 Гц, размещено в приборной косе, в этом примере в сейсмической косе, которая буксируется в море судном. Однако в других формах осуществления изобретения указанные данные о давлении в частотном диапазоне от 0,03 до 1 Гц могут быть собраны с помощью датчиков, расположенных в совокупности буксируемых кос, с помощью датчиков, расположенных в одной или нескольких морских донных косах, уложенных на дне моря, или с помощью одного или нескольких датчиков, расположенных вблизи сейсмического источника.
Обычно сейсмическая коса имеет длину несколько километров. В соответствии с этим примером осуществления изобретения сейсмическая коса снабжена одним или, что предпочтительно, большим количеством датчиков, с помощью которых можно регистрировать поток низкочастотных данных о давлении. Обычно с каждого датчика через регулярные временные интервалы берется в цифровой форме выборка значения давления, при этом интервал между последовательными операциями взятия выборки известен как "интервал выборки".
В особенно предпочтительном варианте осуществления изобретения датчик или по меньшей мере один из датчиков, если их несколько, представляет собой сейсмический датчик, то есть датчик, с помощью которого можно принимать и собирать сейсмические данные. В особенно предпочтительном варианте осуществления один или каждый датчик может быть сейсмическим датчиком давления, например гидрофоном. В качестве альтернативы один или каждый датчик может представлять собой многокомпонентный сейсмический приемник, например 4-компонентный приемник, который включает в себя геофоны для измерения скорости частиц в трех направлениях (x, y и z) и датчик давления, например гидрофон. Поэтому в этом варианте осуществления датчик морской косы действует как датчик для приема и сбора данных о давлении в частотном диапазоне от 0,03 до 1 Гц, так и как сейсмический датчик для сбора сейсмических данных о давлении; в этом варианте осуществления сейсмические датчики давления, которые обычно размещены в морской сейсмической косе, используются для сбора данных о давлении в частотном диапазоне от 0,03 до 1 Гц, так что для этого варианта осуществления изобретения не требуется размещение дополнительных датчиков давления в морской косе.
Гидрофоны представляют собой датчики, содержащие пьезоэлектрические элементы, предназначенные для измерения изменений давления в определенной частотной области. В обычной морской косе гидрофоны распределены на регулярных интервалах поодиночке или группами по длине косы. Например, могут быть образованы группы длиной 12,5 м, включающие в себя по 12 гидрофонов, или могут быть образованы группы длиной 6,25 м, включающие в себя по 6 гидрофонов. Гидрофоны или группы гидрофонов развязаны друг от друга, так что все данные о давлении, которые собираются с их помощью, после аналого-цифрового преобразования и мультиплексирования передаются вдоль косы по оптическим волокнам, проводам или по другим средствам передачи данных в компьютер на борту буксирующего судна, в котором они регистрируются.
Примером пригодной для эксплуатации морской косы под названием "Q" является коса от компании WesternGeco. Эта коса снабжена множеством развязанных гидрофонов (с нарушенной связью), которые могут быть использованы в качестве датчиков при осуществлении изобретения. Однако изобретение не ограничено использованием этой конкретной косы.
Обычно гидрофон или другой датчик давления, расположенный в косе, снабжен или связан с цифровым фильтром верхних частот, который обычно блокирует низкочастотные данные о давлении, например блокирует данные о давлении в частотном диапазоне ниже 3 Гц. Данные на частотах ниже 3 Гц обычно не представляют интереса при сейсмической разведке, поскольку сейсмические данные обычно содержатся в частотном диапазоне приблизительно от 3 до 80 Гц. Фильтр верхних частот может быть применен либо при сборе сейсмических данных, либо позднее при обработке данных. Для использования обычного гидрофона, расположенного в косе, в качестве датчика давления для получения низкочастотных данных о давлении в диапазоне от 0,03 до 1 Гц необходимо отключить соответствующий фильтр верхних частот. После отключения фильтра верхних частот гидрофоны можно использовать не только для приема и сбора сейсмических данных о давлении в частотном диапазоне приблизительно от 3 до 80 Гц, но и для приема и сбора данных о давлении на всех частотах ниже 3 Гц, которые сами не являются сейсмическими данными, поскольку они не относятся к разрезу морского дна. После отключения фильтра верхних частот с помощью каждого датчика давления можно проводить измерения и собирать низкочастотные данные о давлении, на основании которых можно получать высоту h поверхности моря над датчиком. В случае, когда фильтр верхних частот применяется во время обработки собранных данных, данные, принимаемые и собираемые на частотах ниже 3 Гц, имеют достаточно высокий динамический диапазон, так что их также можно использовать в изобретении после отключения фильтра верхних частот.
В случае спокойного моря выражение для давления ниже поверхности моря имеет вид:

где Р0 - гидростатическое давление, измеряемое датчиком;
ρ - плотность воды;
g - ускорение, обусловленное силой тяжести; и
z - глубина указанного датчика ниже среднего уровня моря.
Однако в случае бурного моря с помощью датчика давления обнаруживается давление, которое не столь просто связано с высотой моря непосредственно над ним (Carter D.J.T., Challenor P.G., Ewing J.A., Pit E.G., Srokosk M.A. and Tucker M.J., "Estimating wave climate parameters for engineering applications", Offshore Technology Report OTH 86 228, 1986 (Картер и другие)). В предположении, что система может считаться линейной и что действия различных волн на поверхности моря могут накладываться, динамическая часть давления, измеряемого датчиком давления, имеет вид:

где р - динамическая составляющая давления;
k - волновое число для волны на поверхности моря, равное 2π/λ;
λ - длина волны;
h - смещение вверх поверхности моря непосредственно над датчиком относительно среднего уровня моря; и
d - глубина моря, отсчитываемая от среднего уровня моря.
Для бесконечно глубокого моря уравнение (2) упрощается до:

Из уравнения (3) следует, что датчики давления особенно чувствительны к изменениям высоты моря, для которых характерны небольшие волновые числа k по сравнению с волновыми числами для z. Изменения высоты моря, для которых характерны большие волновые числа k и, следовательно, небольшие длины λ волн, сглаживаются и обнаруживаются с уменьшенной амплитудой. Наличие эффекта сглаживания установили Картер и другие.
При необходимости, для учета нелинейных членов, вязкости и поверхностного натяжения, уравнение (3) может быть видоизменено. Первый из двух членов особенно важен в случае оценки высоты моря в районе волн прибоя.
Как показано на фиг.4, на которой приведены результаты определения глубин при использовании датчика давления, устанавливаемого на глубинах 2, 4 и 8 м ниже среднего уровня моря, и сравнения с истинным профилем высоты волны с 4-метровой характерной высотой, погрешность является незначительной, а чем глубже развернут датчик, тем больше сглаживается отсчет высоты. Уменьшение амплитуды при коротких длинах волн предпочтительно корректировать на этапе обработки данных.
Известно, что поверхностные морские волны занимают часть частотного спектра, заключенного между около 0,03 и около 0,5 Гц. Хотя морские поверхностные волны занимают часть частотного диапазона 0,03-0,5 Гц, в соответствии с эффектом Доплера этот частотный диапазон является расширенным в пределах от 0,03 до 1 Гц вследствие продольного перемещения датчика в направлении судна и относительно движения волны.
На фиг.5А и 5В показан пример необработанных данных о давлении, которые были приняты или собраны, зарегистрированы и использованы с помощью косы Q. Фильтры верхних частот, соединенные с датчиками давления в косе, которые представляют собой обычные цифровые фильтры верхних частот с граничной частотой 3 Гц, были отключены. В этом случае судно, буксировавшее косу Q, в которой были установлены датчики давления, шло курсом бейдевинд. На фиг.5А показаны необработанные данные. По горизонтальной оси представлены первые 400 метров косы, тогда как по вертикальной оси отложено время в секундах. Диагональные линии среди данных соответствуют морским волнам, проходящим вдоль и выше косы. На фиг.5В показан fk-спектр данных из фиг.5А. Ветвь, которая отходит влево и заканчивается приблизительного около 0,5 Гц, соответствует волнам, проходящим поверх косы. Полосатая структура, обусловленная явлением Гиббса, может быть исключена путем соответствующего масштабирования данных от различных секций косы.
Поэтому в соответствии с изобретением для приема и сбора частотных данных, относящихся к морским волнам, в частотном диапазоне, заключенном между около 0,03 и около 1 Гц, используют датчики, чувствительные к частотам ниже примерно 1 Гц. Данные с датчиков передают в запоминающее устройство компьютера на борту буксирующего судна. Данные, собираемые с помощью датчика или групп датчиков, регистрируют и затем обрабатывают для определения высоты поверхности моря над датчиком или группой датчиков.
В предпочтительном способе обработки низкочастотных данных о давлении для определения высоты поверхности моря над датчиком значения высот, которые получают непосредственно из измерений давления и регистрируют, к тому же корректируют для учета перемещения датчика в направлении судна. Это может быть сделано путем интерполяции измерений к линии точек, которые неподвижны в воде. Если вода движется относительно грунта, например, вследствие действий прилива и отлива, данные также можно интерполировать к системе отсчета воды, но не к системе отсчета суши, поскольку волны давления распространяются в водной системе отсчета.
После коррекции перемещения датчика предпочтительно дополнительно скорректировать измерения давления для сглаживания эффекта, обусловленного глубиной погружения датчика. Поправочный коэффициент получают из приведенного выше уравнения (2) для каждой k-составляющей поверхностного волнового поля. k-спектр поверхности получают из частотного спектра данных о давлении и используя дисперсионное соотношение для поверхностных волн:

где ω - угловая частота поверхностной волны, равная 2π/τ;
τ - период волны, равный 1/f;
f - частота в Гц;
k - волновое число для поверхности; и
d - глубина моря относительно среднего уровня моря.
Для бесконечно глубокого моря это выражение сводится к:

Следовательно, в пределе по большим глубинам уравнения (3) и (5) приводятся к уравнению:

описывающему корректирующий фильтр, который в соответствии с изобретением может быть применен для бесконечно глубокого моря. Данные от каждого приемника могут быть подвергнуты деконволюции без использования данных от других приемников.
Следует отметить, что фильтр нижних частот exp(-ω2·z/g) может быть удален путем деконволюции сигнала h(t).
Для случая моря конечной глубины уравнения (2) и (4) объединяют численно для определения фильтра. Однако влияние глубины моря небольшое для морей глубиной 50 м и больше. На фиг.6 показаны характеристики глубинного фильтра для двух различных глубин погружения датчика, 6 и 12 м, и двух глубин моря: бесконечной и 50 м. В дополнение к этому для иллюстрации активной части спектра представлен график спектра Пирсона-Московица для изотропной морской волны с характерной высотой 4 м. На низких частотах, соответствующих бесконечной глубине моря и глубине моря 50 м, кривая для каждого фильтра разделяется на две. В пределах ширины спектра морской волны влияние глубины моря небольшое. Можно видеть, что влияние бесконечной глубины моря на фильтр датчика небольшое, составляющее самое большее несколько процентов в пределах активной части спектра.
Следовательно при использовании изобретения обеспечивается определение высоты поверхности моря над одним или каждым датчиком давления. Поэтому при использовании варианта осуществления изобретения, в котором один или каждый датчик давления представляет собой сейсмический датчик, обеспечивается получение данных о локальной высоте моря относительно сейсмических датчиков, поскольку определяется высота поверхности моря над одним или каждым сейсмическим датчиком.
Кроме того, как отмечалось выше, обычно с каждого датчика периодически берется выборка значения давления. Данные, собранные при выполнении последовательных операций взятия выборки, могут быть обработаны, как описано выше, для определения изменения со временем высоты поверхности моря над сейсмическим датчиком.
Данные о локальной высоте моря, полученные для каждого датчика, используют для многих целей.
Например, знание высоты поверхности моря над каждым датчиком давления дает возможность воссоздания профиля поверхности моря. Это может быть сделано, например, путем использования экстраполяции изменяющегося во времени возвышения поверхности вдоль линии косы. В качестве альтернативы это может быть сделано с помощью метода статистической интерполяции, который предложил Дж. Гофф для определения профиля морского дна.
После воссоздания поверхности моря можно рассчитать отражение от поверхности моря. Это может быть сделано, например, с помощью интегрального метода Кирхгофа, метода Лакс-Вендрофа или с помощью любого другого подходящего метода. Затем можно рассчитать оператор деконволюции и применить к сейсмическим данным, собранным в то же самое время, что и данные о давлении, использованные для получения профиля поверхности моря, чтобы скорректировать сейсмические данные относительно эффектов зависящей от времени высоты поверхности моря. Например, оценку зависящей от времени высоты поверхности моря можно использовать для ослабления в сейсмических данных воздействия волны-спутника при бурном море. Посредством этого улучшается качество получаемых сейсмических изображений.
Данные о высоте моря, полученные на основании низкочастотных данных о давлении, могут быть использованы для коррекции данных о сейсмическом давлении, полученных тем же самым датчиком при наличии зависимости высоты поверхности моря от времени. Их также можно использовать для коррекции других сейсмических данных; например, в случае, если низкочастотные данные о давлении собраны с помощью датчика давления, расположенного в 4-компонентном сейсмическом приемнике, то данные о высоте моря, полученные на основании низкочастотных данных о давлении, могут быть использованы для коррекции, например, данных о скорости частиц, собранных с помощью геофона в 4-компонентном приемнике, а также для коррекции данных о сейсмическом давлении.
Данные о высоте моря, полученные с помощью способа изобретения, в качестве альтернативы могут быть использованы для определения состояния поверхности моря, в частности для оценки высоты волны, и эта процедура известна как "контроль состояния моря". В настоящее время контроль состояния моря осуществляют путем визуального наблюдения за поверхностью моря и присвоения численного значения высоте волн. Однако в соответствии с настоящим изобретением высоту волн на поверхности моря можно определять на основании данных о локальной высоте моря, полученных из низкочастотных измерений давления, или из воссозданного профиля поверхности моря, полученного на основании данных о локальной высоте моря. Этим обеспечивается более точное определение высоты волны по сравнению с тем, которое можно получить путем визуального наблюдения.
Данные о локальной высоте моря, полученные с помощью настоящего изобретения, также могут быть использованы для обеспечения расположения косы точно на одном уровне. Обычно желательно, чтобы во время сейсмической разведки коса находилась по существу на одном уровне (горизонтальном в воде). После погружения косы в воду в соответствии с изобретением могут быть получены данные о локальной высоте моря, и они будут показывать, находится ли коса на одном уровне в воде, а также находится ли коса на требуемом уровне ниже среднего уровня моря. При необходимости можно изменить положение косы или одного или нескольких сегментов косы, а после того как данные о локальной высоте будут свидетельствовать о том, что коса находится на одном уровне и на нужной глубине, коса будет подготовлена для сбора сейсмических данных.
Данные о локальной высоте моря можно контролировать, чтобы гарантировать нахождение косы на одном уровне и на требуемой глубине погружения во время разведки. Например, если из данных о локальной высоте моря следует, что глубина погружения одной секции косы возросла, тогда как глубина погружения других секций косы осталась по существу неизменной, то это с большой вероятностью означает, что в одной секции произошла утечка, что вызвало погружение в результате проникновения морской воды.
Как отмечалось выше, в одном предпочтительном варианте осуществления изобретения низкочастотные данные о давлении собирают, используя сейсмический датчик давления, например гидрофон. Это обеспечивает возможность сбора низкочастотных данных о давлении одновременно с сейсмическими данными. В свою очередь, это позволяет определять данные о локальной высоте моря в течение интервалов времени, на которых собирают сейсмические данные, например, для использования с целью подавления волн-спутников в сейсмических данных. Если низкочастотные данные о давлении и сейсмические данные собирают вместе таким способом, то предпочтительно принимать и собирать низкочастотные данные одновременно с сейсмическими данными и в течение того же самого периода времени, что и сейсмические данные. Например, низкочастотные данные о давлении можно собирать в течение периода времени, начинающегося за двадцать секунд до начала сбора сейсмических данных и продолжающегося двадцать секунд после окончания сбора сейсмических данных.
Следует отметить, что на практике гидрофон имеет внутренний фильтр верхних частот (в дополнение к цифровому фильтру верхних частот, упомянутому выше). На низких частотах гидрофон работает как конденсатор, а электрические провода, по которым передается выходной сигнал гидрофона, действуют как сопротивление; кроме того, с гидрофона сигнал обычно подается на усилитель напряжения, имеющий входной импеданс. Емкость гидрофона и сопротивление цепи будут действовать как фильтр верхних частот. Этот фильтр верхних частот может сильно ослаблять амплитуду выходного сигнала гидрофона для волн давления в частотном диапазоне от 0,03 до 1 Гц. Для точного определения локальной высоты моря необходимо скорректировать действие этого фильтра верхних частот, и эта процедура известна как "обратный выгиб характеристики" фильтра. В случае, если емкость гидрофона и сопротивления проводов известны, собранные данные могут быть скорректированы для исключения действия внутреннего фильтра верхних частот.
В дополнение к сейсмическим датчикам известную косу обычно снабжают датчиками глубины. Обычно они представляют собой датчики гидростатического давления, которые измеряют гидростатическое давление на частотах ниже приблизительно 0,02 Гц; глубину погружения датчика получают из измеренного гидростатического давления в соответствии с уравнением (1). (Обычно датчики глубины представляют собой датчики давления с преобразованием значения давления в значение глубины на основе (номинальной или калиброванной) плотности воды и барометрического давления воздуха, а не измеряют глубину непосредственно). Эти известные датчики глубины можно использовать для контроля качества или калибровки низкочастотных данных о давлении, собранных с помощью гидрофона. Такой контроль представляется полезным, поскольку на низких частотах содержание шумов в выходном сигнале гидрофона может быть значительным. Калибровка, обеспечиваемая датчиком глубины, работающим на частоте 0,02 Гц или ниже, может быть успешно распространена на область, находящуюся за пределами мест размещения гидрофонов, расположенных вблизи датчика глубины, поскольку очень низкие частоты, на которых работает датчик глубины, соответствуют поверхностным волнам, имеющим очень большую длину волны.
В варианте осуществления, описанном выше, данные о давлении в частотном диапазоне от 0,03 до 1 Гц собирают, используя сейсмический датчик. Однако изобретение не ограничено этим, и данные о давлении в частотном диапазоне от 0,03 до 1 Гц можно собирать, используя один или несколько отдельных датчиков, специально предназначенных для этой цели. Например, в таком варианте осуществления сейсмическая коса в дополнение к сейсмическим датчикам косы может быть снабжена одним или несколькими датчиками для сбора данных о давлении в частотном диапазоне от 0,03 до 1 Гц. Дополнительный датчик давления может быть любым датчиком давления, с помощью которого можно собирать данные о давлении в частотном диапазоне от 0,03 до 1 Гц. В этом варианте осуществления коса имеет первый комплект, состоящий из одного или нескольких датчиков, для сбора низкочастотных данных о давлении, и второй комплект, состоящий из одного или нескольких датчиков, для сбора сейсмических данных; с помощью сейсмических датчиков косы собирают сейсмические данные, а с помощью дополнительных датчиков в косе собирают низкочастотные данные о давлении поверхностных волн.
Когда выходные сигналы от таких дополнительных низкочастотных датчиков давления используют для подавления волн-спутников в сейсмических данных, собранных с помощью сейсмических датчиков косы, то предпочтительно, чтобы каждый низкочастотный датчик давления находился по существу на одном месте с соответствующим сейсмическим датчиком. Предпочтительно размещать каждый низкочастотный датчик давления на одном месте с или в пределах около 3 м на расстоянии от сейсмического приемника, данные которого должны корректироваться. Кроме того, предпочтительно принимать и собирать низкочастотные данные о давлении по существу одновременно с сейсмическими данными и в течение по меньшей мере того же самого периода времени, что и сейсмические данные. Например, низкочастотные данные о давлении можно собирать в течение периода времени, начинающегося за двадцать секунд до начала сбора сейсмических данных и продолжающегося двадцать секунд после окончания сбора сейсмических данных.
Хотя выше изобретение описано с особым упором на сейсмическую косу, изобретение не ограничено ею, а может быть реализовано с любой группой сейсмических приемников. Если группа приемников включает в себя сейсмические датчики давления, изобретение может быть осуществлено при использовании сейсмических датчиков давления для сбора низкочастотных данных о давлении и/или при использовании одного или нескольких дополнительных низкочастотных датчиков давления для сбора низкочастотных данных о давлении. С другой стороны, если группа приемников не включает в себя сейсмические датчики давления, изобретение может быть осуществлено при использовании одного или нескольких дополнительных низкочастотных датчиков давления для сбора низкочастотных данных о давлении.
В принципе, изобретение может быть осуществлено при использовании единственного низкочастотного датчика давления. Однако это позволит получать лишь ограниченную информацию о высоте моря (а именно, единственное значение высоты моря над этим датчиком). Предпочтительно использовать множество низкочастотных датчиков давления, поскольку это позволит получать информацию о высоте поверхности столба жидкости над каждым из большого количества датчиков и также позволит сформировать профиль поверхности моря на основании информации о высоте поверхности столба жидкости над каждым из множества датчиков, например, путем интерполяции высоты моря между местами их расположения.
Выше изобретение описано со ссылками к одному или более низкочастотных датчиков давления, расположенных в группе приемников. Однако изобретение не ограничено этим и может быть реализовано при использовании группы морских сейсмических источников путем включения в группу излучателей одного или нескольких датчиков давления, чувствительных в частотном диапазоне 0,03-1 Гц, при этом каждый датчик связан совместно с группой сейсмических источников или с соответствующим сейсмическим источником. Выходные сигналы от датчиков можно обрабатывать так, как описано выше, для получения локальной высоты моря над каждым датчиком. Их можно использовать, например, для коррекции волн-спутников при бурном море, обусловленных источником, и в этом случае каждый низкочастотный датчик давления предпочтительно располагать по существу на одном месте с соответствующим ему источником, например, располагать на одном месте с или в пределах около 3 м на расстоянии от сейсмического источника, сигнал которого должен корректироваться.
Следует отметить, что обработка, необходимая для определения локализованной высоты моря над датчиком, расположенным в или на группе излучателей, не может быть точно такой же, как в случае датчика, расположенного в или на группе приемников. Группа источников обычно находится в подвешенном состоянии относительно поплавка и поэтому расположена на постоянном расстоянии ниже поверхности моря, то есть группа источников перемещается вверх и вниз при изменении высоты моря. Это перемещение группы источников представляет доплеровский сдвиг, который должен учитываться при обработке данных, собираемых с помощью датчика, расположенного на группе источников. (В противоположность этому коса обычно удерживается посредством устройств регулирования глубины на постоянной "глубине" независимо от высоты/волнения моря).
На фиг.7 приведена структурная схема устройства 1, посредством которого можно обрабатывать низкочастотные данные о давлении, собираемые способом согласно настоящему изобретению, для определения локальной высоты моря над одним или каждым датчиком. В предпочтительном варианте осуществления устройство 1 дополнительно обеспечивает возможность обработки сейсмических данных с использованием локальных высот моря для ослабления действия волн-спутников в обработанных сейсмических данных.
Устройство 1 содержит программируемый процессор 2 данных с запоминающим устройством 3 для хранения программ, например, в виде постоянного запоминающего устройства (ПЗУ), в котором для обработки сейсмических данных способом изобретения хранится программа, предназначенная для управления процессором 2 данных. Устройство также содержит энергонезависимое запоминающее устройство 4 с оперативной записью и считыванием, выполненное с возможностью хранения, например, всех данных, которые должны сохраняться в отсутствие питания. "Рабочее" или сверхоперативное запоминающее устройство для процессора данных снабжено памятью 5 с произвольной выборкой. Устройство 6 ввода предусмотрено, например, для приема команд и данных от пользователя. Одно или несколько устройств 7 вывода предусмотрены, например, для отображения информации, относящейся к ходу и результату обработки. Устройством (устройствами) вывода может быть, например, принтер, визуальный индикатор или выходное запоминающее устройство.
Массив данных для обработки может подаваться через входное устройство 6 или при необходимости может обеспечиваться машинно-считываемым устройством 8 для хранения данных.
Результаты обработки могут быть выведены через выходное устройство 7 или могут быть сохранены.
Программа для функционирования устройства и для осуществления способа, описанного выше, хранится в запоминающем устройстве 3 для хранения программ, которое может быть выполнено в виде полупроводникового запоминающего устройства, например в виде хорошо известного из уровня техники постоянного запоминающего устройства. Однако программы также могут храниться на любом другом подходящем носителе данных, например на магнитном носителе 3а данных (таком, как "дискета") или на CD-ROM 3b.
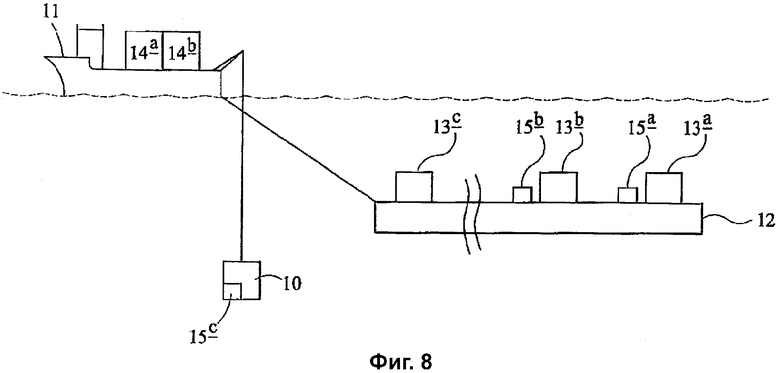
На фиг.8 показан вариант осуществления сейсморазведочной установки в соответствии с настоящим изобретением. Сейсморазведочная установка содержит группу источников, в целом обозначенную позицией 10, которая включает в себя один или более сейсмических источников и подвешивается на сейсморазведочном судне 11 ниже поверхности моря. Сейсморазведочная установка также содержит группу приемников. Она показана как коса 12, которая на фиг.8 также буксируется сейсморазведочным судном, но группа приемников может быть любой другой группой приемников, такой как, например, множество буксируемых кос или морская донная коса. Множество сейсмических приемников 13а, 13b, 13c, каждый из которых выполнен в виде или включает в себя сейсмический датчик давления, такой как, например, гидрофон, обеспечено в косе. Сейсмические данные, собираемые с помощью сейсмических приемников 13a, 13b, 13c, передаются по оптическим волокнам, проводам или по другим средствам для передачи данных вдоль косы в первое устройство 14а для обработки и/или регистрации на борту буксирующего судна 11.
Каждым из номеров 15а и 15b обозначен низкочастотный датчик давления, с помощью которого можно собирать данные о давлении в частотном диапазоне от 0,03 до 1 Гц. Каждый из этих датчиков расположен вблизи одного сейсмического приемника, вблизи приемника 13а и 13b соответственно. Низкочастотные данные о давлении, собираемые с помощью датчиков 15а, 15b давления, передаются во второе устройство 14b для обработки и/или регистрации на сейсморазведочном судне 11, в котором низкочастотные данные о давлении, собираемые с помощью датчика давления 15а, обрабатываются для получения локальной высоты моря над датчиком 15а давления (которая по существу эквивалентна локальной высоте моря над приемником 13а вблизи датчика 15а давления). Аналогичным образом низкочастотные данные о давлении, собираемые с помощью датчика 15b давления, обрабатываются для получения локальной высоты моря над датчиком 15b давления (которая по существу эквивалентна локальной высоте моря над соседним приемником 13b).
На практике из выходных сигналов датчиков 15a, 15b давления неоднократно берутся выборки значения давления в частотном диапазоне от 0,03 до 1 Гц, так что можно определять изменяющуюся во времени локальную высоту моря над каждым датчиком. Полученные данные о высоте моря могут быть использованы для любых целей, описанных выше, например, на основании этих измерений локальной высоты может быть определен изменяющийся во времени профиль поверхности моря. (На практике коса может содержать намного больше низкочастотных датчиков давления, чем показано на фиг.8, так что можно получать больше измерений локальной высоты моря для определения профиля моря).
Как отмечалось выше, изобретение может быть осуществлено при использовании сейсмических датчиков давления для получения низкочастотных данных о давлении. Это показано на фиг.8, где позицией 13с обозначен сейсмический приемник, имеющий сейсмический датчик давления, у которого присоединенный к нему цифровой фильтр верхних частот выключен и с помощью которого, следовательно, можно собирать данные о давлении примерно в диапазоне от 0,03 до 1 Гц. Поэтому для приемника 13с не требуется размещенного на том же месте низкочастотного датчика давления. Низкочастотные данные о давлении, собираемые с помощью приемника 13с, передают во второе устройство 14b для обработки и/или регистрации на сейсморазведочном судне 11, а сейсмические данные, собираемые с помощью приемника 13с, передают в первое устройство 14а для обработки и/или регистрации. Низкочастотные данные о давлении, собираемые с помощью приемника 13с, обрабатывают для получения локальной высоты моря над приемником 13с.
На практике изобретение можно осуществлять, используя низкочастотные датчики давления, расположенные по существу на одном месте с каждым сейсмическим приемником, или используя каждый сейсмический датчик давления для получения низкочастотных данных о давлении при отключении присоединенного к нему цифрового фильтра верхних частот. Оба этих способа показаны на фиг.8, главным образом для иллюстрации, хотя в принципе эти два способа можно комбинировать.
Под номером 15с обозначен датчик давления, расположенный в группе 10 источников, с помощью которого можно собирать данные о давлении в частотном диапазоне приблизительно от 0,03 до 1 Гц. Низкочастотные данные о давлении, собираемые с помощью датчика 15с давления, также передают во второе устройство 14b для обработки и/или регистрации на сейсморазведочном судне 11, и они могут быть обработаны для получения локальной высоты моря над датчиком 15с давления (которая по существу эквивалентна локальной высоте моря над группой 10 излучателей).
Устройства 14a, 14b для обработки и/или регистрации могут быть объединены в одно устройство для обработки и/или регистрации. Они могут включать в себя устройство 1, показанное на фиг.7. Сейсмические данные и низкочастотные данные о давлении на сейсморазведочном судне могут просто регистрироваться для последующей обработки, или одни данные или все данные могут обрабатываться в реальном времени или почти в реальном времени (например, для контроля глубины погружения косы).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЙ НА АКВАТОРИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592739C1 |
| СЕЙСМИЧЕСКИЙ ДАТЧИК С ДАТЧИКАМИ ПЕРЕМЕЩЕНИЯ СНИЖЕНИЯ ШУМА | 2014 |
|
RU2678261C2 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714519C1 |
| Низкочастотная двухкомпонентная донная сейсмическая коса | 2017 |
|
RU2687297C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА С РЕЖЕКЦИЕЙ ВОЛНЫ-СПУТНИКА И ДВИЖЕНИЯ | 2011 |
|
RU2546997C2 |
| СВИПИРОВАНИЕ ДЛЯ МОРСКИХ ВИБРАТОРОВ | 2012 |
|
RU2546753C1 |
| СИСТЕМА ШУМОПОДАВЛЕНИЯ СО СДВОЕННЫМ ДАТЧИКОМ ДЛЯ ПОДВОДНОЙ СЕЙСМОПРИЕМНОЙ КОСЫ | 2011 |
|
RU2569414C2 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| ОСЛАБЛЕНИЕ ВОЛН-СПУТНИКОВ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2005 |
|
RU2418308C2 |
Изобретение относится к способу и системе для определения высоты поверхности столба жидкости над датчиком и может быть использовано при сборе морских сейсмических данных. Сущность: размещают один или множество датчиков внутри столба жидкости. При этом один или каждый датчик является чувствительным к волнам давления на частотах ниже примерно 1 Гц. Собирают при помощи указанного датчика или датчиков данные о давлении в частотном диапазоне 0,03-1 Гц. Обрабатывают полученные данные для получения информации о высоте поверхности столба жидкости над одним или каждым датчиком. Технический результат: повышение точности измерений. 7 н. и 19 з.п. ф-лы, 8 ил.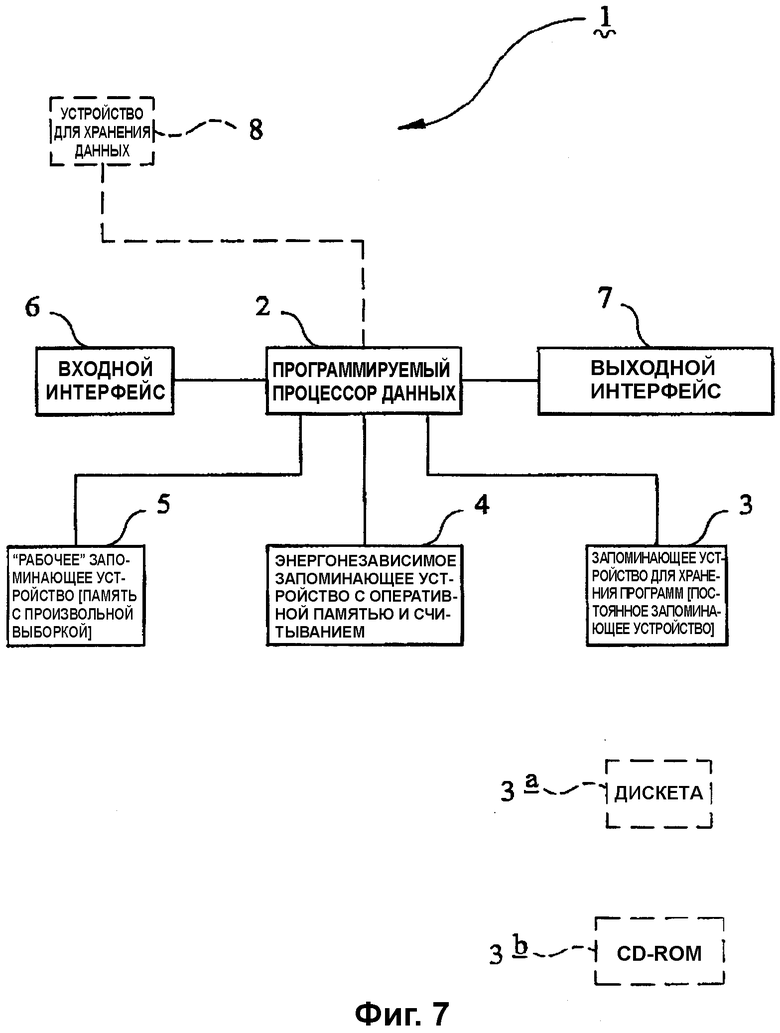
обеспечение одного или множества датчиков внутри столба жидкости, при этом один или каждый датчик является чувствительным к волнам давления на частотах ниже примерно 1 Гц;
использование указанного датчика или датчиков для приема и сбора данных о давлении в частотном диапазоне, в диапазоне между около 0,03 и около 1 Гц; и
обработку указанных данных о давлении для получения информации о высоте поверхности столба жидкости над одним или каждым датчиком.
p(ω)=ρ·g·h(ω)·exp(ω2·z/g),
где р(ω) - давление, регистрируемое датчиком;
ρ - плотность жидкости;
g - ускорение, обусловленное силой тяжести;
z - глубина погружения датчика ниже среднего уровня моря;
ω - угловая частота поверхностной волны, и
h - смещение вверх поверхности столба жидкости непосредственно над датчиком и относительно среднего уровня моря.
p=ρ·g·h·cosh(k(d-z))/cosh(kd) и
ω2=g·k·tgh(kd),
где р - давление, регистрируемое датчиком;
ρ - плотность воды;
g - ускорение, обусловленное силой тяжести;
z - глубина погружения указанного датчика ниже среднего уровня моря;
ω - угловая частота поверхностной волны;
d - глубина моря относительно среднего уровня моря, и
h - смещение вверх поверхности моря непосредственно над датчиком и относительно среднего уровня моря.
обеспечение одного или множества первых датчиков внутри столба жидкости, при этом один или каждый первый датчик является чувствительным к волнам давления на частотах, идущих вниз до примерно 0,03 Гц;
обеспечение одного или множества вторых датчиков внутри столба жидкости, при этом один или каждый второй датчик представляет собой сейсмический датчик; использование указанного первого датчика или датчиков для приема и сбора данных о давлении в частотном диапазоне между около 0,03 и около 1 Гц;
использование указанного второго датчика или датчиков для приема и сбора сейсмических данных, по существу, одновременно с этапом приема и сбора данных о давлении;
обработку указанных данных о давлении для получения информации о высоте поверхности столба жидкости над одним или каждым первым датчиком; и
обработку сейсмических данных при использовании информации о высоте поверхности столба жидкости над одним или каждым первым датчиком, в результате чего в обработанных сейсмических данных ослабляются воздействия волн-спутников при бурном море.
один или более датчиков, расположенных внутри столба жидкости, при этом один или каждый датчик выполнен с возможностью приема и сбора данных о давлении в частотном диапазоне, в диапазоне между около 0,03 и около 1 Гц при использовании; и
устройство обработки для обработки указанных данных о давлении для получения информации о высоте поверхности столба жидкости над одним или каждым датчиком.
сейсмический источник, расположенный внутри столба жидкости;
один или более первых датчиков, расположенных внутри столба жидкости и отстоящих от сейсмического источника, при этом один или каждый сейсмический датчик выполнен с возможностью приема и сбора данных о давлении в частотном диапазоне, заключенном между около 0,03 и около 1 Гц;
один или более вторых датчиков, при этом один или каждый из вторых датчиков выполнен с возможностью приема и сбора сейсмических данных, по существу, одновременно со сбором данных о давлении;
первое устройство обработки для обработки указанных данных о давлении для получения информации о высоте поверхности столба жидкости над одним или каждым датчиком; и
второе устройство обработки для обработки сейсмических данных с использованием информации о высоте поверхности столба жидкости над одним или каждым датчиком, в результате чего в обработанных сейсмических данных ослабляются воздействия волн-спутников при бурном море.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039368C1 |
| US 4441173 A, 03.04.1984 | |||
| Электрическая пишущая машина | 1935 |
|
SU43902A1 |
| Способ измерения заглубления излучателя | 1984 |
|
SU1191856A1 |
| JP 11064051 A, 05.03.1999. | |||

