Изобретение относится в целом к морской сейсмической разведке и, в частности, к устройству и способам для снижения влияния нежелательных сейсмических отражений и шума в датчиках, буксируемых позади разведывательного судна, в датчиках, уложенных на морском дне, или в датчиках в автономных узлах.
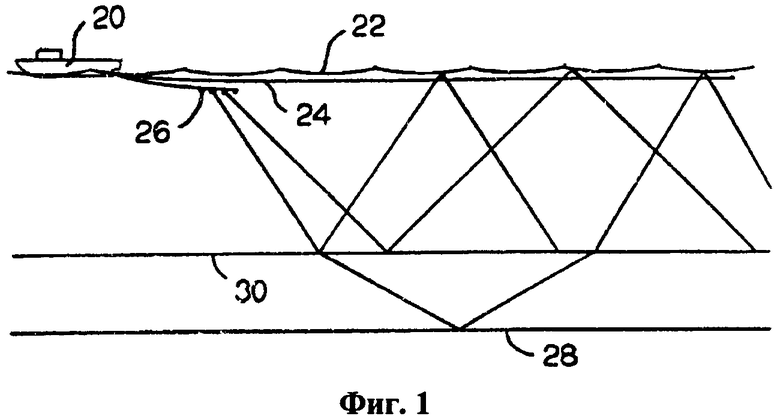
В морской сейсморазведке с использованием буксируемого оборудования, гидроакустическую приемную антенную решетку буксируют позади морского судна 20 у поверхности 22 моря, как изображено на фиг.1. Гидрофоны установлены на кабелях с несколькими датчиками, которые обычно называют сейсмоприемными косами 24. Сейсмоприемные косы служат в качестве платформ для гидрофонов. Сейсмический источник звука 26, который также буксируют у поверхности моря, периодически испускает акустическую энергию. Данная акустическая энергия проходит сквозь воду по направлению вниз, отражается от подводных конструкций или подводных пластов 28 и возвращается вверх сквозь воду к гидрофонной антенной решетке. Отраженная сейсмическая энергия поступает на точки приема буксируемой антенной решетки. Гидроакустическая приемная антенная решетка содержит много подобных точек приема и регистрирует сейсмический акустический импульс, проходящий вертикально от морского дна 30, в каждой точке приема. Записи с гидрофона затем обрабатываются в сейсмические изображения подводных конструкций.
Шум является важным фактором в работе буксируемой сейсмоприемной косы. Источники шума включают шум, создаваемый зыбью, и шум, создаваемый волнами, с поверхности моря. Также, буксировка сейсмоприемной косы сквозь толщу воды производит шум. Некоторые из данных шумов проходят через сейсмическую косу и некоторые - проходят через собственно толщу воды. Обычной мерой по отношению к источникам шума является использование сочетания временной и пространственной фильтрации. Временная фильтрация осуществляется посредством дискретной цифровой выборки сигналов гидрофона по времени с присвоением выборке весового коэффициента. Каналы гидрофона также содержат аналоговые фильтры для предотвращения наложения сигналов на частотах, превышающих половину частоты выборки. Пространственная выборка обычно образована группой, суммирующей выходные данные отдельного гидрофона, с тем, чтобы ослабить шум давления, распространяющийся вдоль длины сейсмоприемной косы. Данная пространственная выборка не оказывает воздействия на шум, который распространяется в направлении, перпендикулярном оси сейсмоприемной косы. Обычные гидрофонные группы состоят примерно из восьми гидрофонов в секции сейсмоприемной косы длиной 12 м.
Акустический импеданс, ρс, является произведением плотности и скорости звука в среде. Отражение, по меньшей мере, части энергии звуковых волн происходит всякий раз, когда звуковые волны сталкиваются с изменением акустического импеданса. Неотраженная энергия передается (преломляется) за пределы границы между двумя областями различных акустических импедансов. Волны давления являются волнами сжатия, которые вызывают движение частиц в направлении распространения. На плоской границе между двумя различными однородными средами звуковая волна отражается под углом, равным углу падения θ1, и преломляется под углом θ2. Угол преломления приведен в следующем уравнении:
θ2=sin-1(c2sinθ1/c1).
Нижний индекс относится к перемещению звуковой волны от среды 1 к среде 2, и c1 и с2 являются скоростями звука в каждой среде. Если угол падения θ1 равен нулю, то путь распространения энергии преломленных волн будет направлен под углом θ2, равным нулю.
Если угол падения θ1 равен нулю и энергия не была преобразована в энергию сдвига, коэффициент отражения на границе воды и воздуха приведен в уравнении:

Отраженная энергия на границе воды и воздуха равна R2 рр, или приблизительно 1, что делает поверхность моря практически идеальным отражателем звуковой энергии. После возвращения от морского дна или важной цели, энергия снова отражается поверхностью моря обратно к сейсмоприемной косе. Так как обычный гидрофон обладает всенаправленным откликом, гидроакустическая приемная антенная решетка также регистрирует отклик волны-спутника, которая является сейсмическим акустическим импульсом, отраженным от поверхности моря и прибывающим с задержкой во времени и обратной полярностью. Волна-спутник является сейсмоакустической волной, направленной вниз, которая, при добавлении к требуемой волне, ухудшает зарегистрированное сейсмическое изображение. Отражение, вызывающее волну-спутник, также может продолжать движение к морскому дну или другому сильному отражателю и отражаться назад для повторного столкновения с необходимыми отраженными волнами и дальнейшего ухудшения изображения. Данные отраженные волны обычно называют кратными волнами.
В случае с волной давления, перемещающейся вертикально, волна-спутник создает провал в частотном спектре отклика гидрофона в fпровал=c/2d, где с - скорость звука, a d - глубина сейсмоприемной косы. Сейсмоприемные косы обычно буксируют на глубине 10 м или менее. На глубине 10 м частота провала (fпровал) равна 75 Гц. Частотный отклик, выходящий за пределы 100 Гц, необходим для высокого разрешения сейсмического изображения. Поскольку частота провала обратно пропорциональна глубине буксировки, сейсмоприемные косы часто буксируют на малых глубинах для улучшения разрешения сейсмического изображения. Буксировка на малых глубинах является проблематичной, поскольку шум от поверхности моря начинает создавать помехи требуемым сейсмическим сигналам. Данные воздействия усугубляются при ухудшении погодных условий, что иногда заставляет экипаж прекращать работы до улучшения погодных условий. Устранение воздействий провала, вызванного волной-спутником, может позволить выполнять буксировку на больших глубинах, вдали от поверхностных возмущений.
Донные системы, в которых сейсмические датчики размещают на морском дне, режектируют волны-спутники и кратные волны благодаря методике, обычно известной как p-z-суммирование. В акустической волне, давление р является скалярной величиной, а скорость частиц u является векторной величиной. Гидрофон с положительным всенаправленным откликом регистрирует давление р сейсмоакустической волны. Вертикально направленный геофон или акселерометр регистрирует вертикальный компонент скорости частиц сейсмоакустической волны uz с положительным откликом на сигналы, проходящие вверх, и отрицательным откликом на сигналы, проходящие вниз. В p-z-суммировании сигнал скорости масштабируется акустическим импедансом рс морской воды перед его добавлением к сигналу давления. Одноосевой датчик на карданном подвесе также масштабируется на случай изменения чувствительности датчика движения частиц из-за внеосевого поступления любых полученных сигналов. При использовании акселерометра, его выходной сигнал может быть интегрирован для получения сигнала скорости, или сигнал гидрофона может быть дифференцирован для того, чтобы он лучше совпадал по спектру с акселерометром. В результате получен составной датчик, который обладает полным откликом на волну, проходящую вверх, и, по меньшей мере, частично приглушенным откликом на волну, проходящую вниз, для режекции волны-спутника и кратных волн. Одним из подобных способов формирования сигнала и объединения сигналов для получения одной трассы с режекцией волн-спутников описан в патенте США №6,539,308, выданном Monk et al. Фиг.2 является двухмерным (2D) изображением отклика датчика скорости частиц. Фиг.3 является 2D изображением отклика всенаправленного гидрофона, суммированного с откликом датчика вертикального движения частиц. Полные трехмерные отклики могут быть представлены путем вращения 2D откликов вокруг их вертикальных осей.
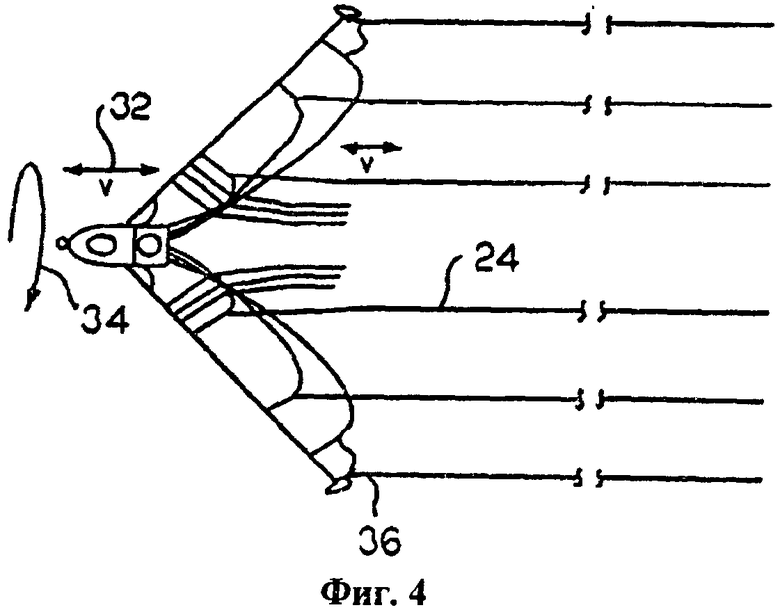
В последнее время был проявлен интерес к использованию методик, подобных p-z суммированию, в сборе данных с использованием буксируемых сейсмоприемных кос для получения возможности выполнять буксировку на больших глубинах без помех, со стороны отраженных волн, вызванных волнами-спутниками и провалами в частотном спектре. При эксплуатации датчика движения частиц в сейсмоприемной косе возникает проблема, поскольку сейсмоприемная коса испытывает ускорения из-за буксировки или воздействий поверхности моря, которые являются большими по сравнению с ускорениями, вызванными требуемыми сейсмическими отражениями. Более того, данные нежелательные ускорения находятся в той же спектральной полосе, что и отклик требуемых отражений. Когда буксировочное судно встречает океанские волны, возникают небольшие отклонения в скорости судна. Также при движении судна, как правило, возникает движение рыскания. На фиг.4 изображена энергия, которую придают сейсмоприемным косам 24 изменения скорости 32 и движение рыскания 34. Фиг.5 представляет собой вид сбоку, изображающий энергию, вызывающую ускорения и поперечные волны в сейсмоприемной косе 24. (Воздействие энергии на сейсмическую косу на фиг.5 преувеличено в иллюстративных целях.) Большая часть энергии ослабляется упругими растягивающимися элементами 36, обычно расположенными впереди приемных антенных решеток. Хотя большая часть энергии ослабляется, определенная часть сохраняется. Ускорения а, вызванные плоскими волнами давления из-за требуемых сейсмических отраженных волн, выражены уравнением:

где р - уровень акустического звукового давления, f - частота и Z - акустический импеданс. Эксплуатационные характеристики системы для измерения скорости частиц должны быть приближены к пределам внешнего шума. Как правило, потребители сейсмических данных требуют, чтобы внешний шум от гидрофонных систем с сейсмическими косами был ниже 3 микробар. Поскольку акустический импеданс морской воды составляет 1,5 МПа на м2, волна давления 3 микробар с частотой 4 Гц вызывает ускорения частиц, равные около 0,5 мкг. На фиг.6 изображена механическая модель частотного отклика обычных осевых ускорений кабеля в середине сейсмоприемной косы. Наличие вторичного пика на 4 Гц, амплитуда которого лишь в 1,5 раза ниже первичного пика, обозначает, что в некоторых случаях динамическое движение кабеля может быть больше измеряемого сейсмического сигнала.
Патент США №7,167,413, выданный Rouquette, использует акселерометр в сейсмоприемной косе для режекции воздействия провала, вызванного волной-спутником. Rouquette использует систему масс и пружин для снижения воздействия динамики кабеля на акселерометр и систему динамометрических датчиков для измерения и режекции воздействия шума, вызванного движением кабеля, на акселерометр. Система Rouquette основана на хорошо известных сложных механических отношениях, которые не остаются постоянными под влиянием производственных допусков, старения и условий окружающей среды. Rouquette использует адаптивный алгоритм обработки сигналов для выведения отношения системы масс и пружин с динамометрическими датчиками к ускорению, действующему непосредственно на акселерометр. Rouquette описывает сложную механическую и электронную систему.
Патент США №. 7,239,577, выданный Tenghamn et al., описывает устройство и способ режекции провала, вызванного волной-спутником, с помощью датчика скорости частиц акустической волны. Tenghamn et al. указывает на использование геофона с жидкостным демпфированием на карданном подвесе. В данной области техники известно, что жидкость, заключающая геофон в капсулу, выбрана таким образом, чтобы обеспечивать демпфирование датчика на карданном подвесе. Хотя это не указано в патенте Tenghamn et al., в данной области техники известно, что виброизоляционная система масс и пружин может снизить воздействие механического движения кабеля на отклик геофона. Движение геофона, вызванное механическим движением кабеля, неотличимо от движения частиц акустической волны в отклике геофона. В патенте Tenghamn et al. требуемое движение частиц сейсмической волны трудно распознать из-за механического движения кабеля. Данная методика также создает отклик, подобный кардиоиде на фиг.3, где представлены все еще нежелательные сигналы, проходящие от поверхности и вызванные возбуждением сейсмоприемной косы, направленным вдоль оси сейсмоприемной косы.
Патент США №7,359,283, выданный Vaage et al., описывает способ сочетания датчиков давления и датчиков движения частиц для решения проблемы воздействия механического движения на датчики движения частиц. В данном способе отклик датчика движения частиц ниже определенной частоты f0 не используется, а используется лишь отклик, рассчитанный из отклика датчика давления и известной глубины датчика давления. Режектируют те частоты, для которых ожидается механическое движение сейсмоприемной косы. Рассчитанный отклик обладает плохим соотношением сигнал-шум на важных низких частотах. Данная режекция сигналов ниже определенной частоты не является оптимальной, поскольку она также режектирует полезные сигналы в важном низкочастотном диапазоне, где может находиться информация о глубокозалегающих объектах.
Хотя все указанные патенты описывают способы режекции провала, вызванного волной-спутником, в сейсмоприемной косе, ни в одном из указанных патентов не приведено достаточное решение проблемы воздействий буксировки сейсмоприемной косы и другого шума, который влияет на измерения датчика движения частиц или гидрофона. Также, во всех указанных патентах не достигнута цель, которая заключается в создании высокоточных определяемых компонентов акустических волн с хорошим отношением сигнал-шум для работы на самых низких из важных частот.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Подводная сейсмическая система, включающая в себя признаки данного изобретения, устраняет данные недостатки. Подобная система содержит первый датчик движения, который может использоваться на подводной платформе и обладает первым откликом, и второй датчик движения, который расположен вблизи первого датчика движения и обладает вторым откликом. Первый и второй отклики обладают подобными амплитудами при движении платформы и различными амплитудами при движении частиц акустической волны.
Одна версия содержит первый датчик движения, обладающий первым акустическим импедансом для создания сигнала первого датчика, представляющего движение платформы и акустических волн, и второй датчик движения, расположенный вблизи первого датчика движения и обладающего вторым акустическим импедансом для создания сигнала второго датчика, представляющего движение платформы и движение частиц, ослабленное акустическими волнами. Средство объединения сигнала первого датчика и сигнала второго датчика ослабляет шум из-за движения платформы и создает отклик на движение частиц из-за акустических волн.
Еще одна версия содержит первый датчик движения и второй датчик движения, расположенный вблизи первого датчика движения. Акустический экран расположен таким образом, чтобы защищать лишь второй датчик движения от движения частиц акустической волны.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Данные аспекты и признаки изобретения будут более понятны из следующего описания, прилагаемой формулы изобретения и сопроводительных чертежей, на которых:
Фиг.1 изображает вертикальную боковую проекцию обычной сейсморазведочной операции, изображающую антенную решетку гидрофонов, которую буксируют за разведывательным судном, и изображающую отраженную сейсмическую энергию, поступающую в точки приема на буксируемой антенной решетке;
Фиг.2 изображает двухмерный график отклика датчика скорости частиц;
Фиг.3 изображает двухмерный график отклика всенаправленного гидрофона, суммированного с откликом датчика вертикальной скорости частиц;
Фиг.4 изображает вид сверху обычных разведывательных работ по фиг.1, отображающий колебания скорости буксировки и рыскание;
Фиг.5 изображает вертикальную боковую проекцию разведывательных работ по фиг.4, изображающую в преувеличенном виде влияние колебаний скорости буксировки и рыскания на форму сейсмоприемной косы;
Фиг.6 изображает график обычных ускорений сейсмоприемной косы в ходе разведывательных работ по фиг.1;
Фиг.7 изображает блок-схему общей версии подводной сейсмической системы, воплощающей признаки данного изобретения, включая два датчика движения с различными акустическими откликами;
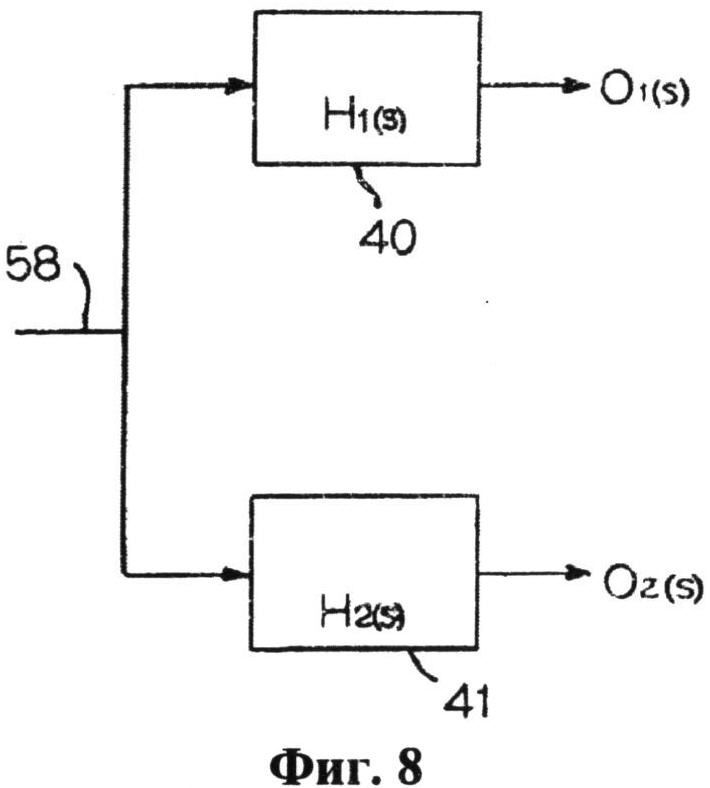
Фиг.8 изображает блок-схему в частотной области откликов датчиков движения по фиг.7 на компонент акустической волны падающей акустической энергии;
Фиг.9 изображает блок-схему в частотной области откликов датчиков движения по фиг.7 на компонент движения платформы падающей акустической энергии;
Фиг.10 изображает график во временной области выходных данных датчика движения по фиг.7, который реагирует на движение платформы и акустические волны (волны давления);
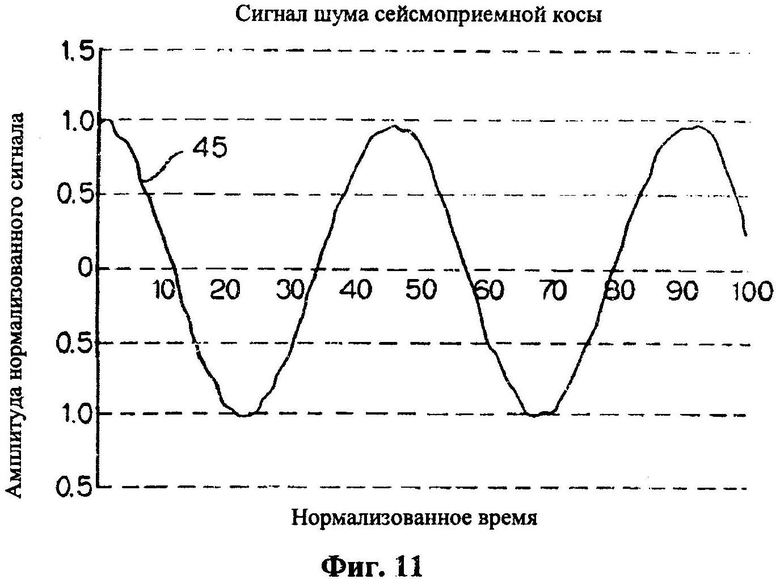
Фиг.11 изображает график во временной области выходных данных датчика движения по фиг.7, который реагирует лишь на движение платформы;
Фиг.12 изображает график различий между выходными данными по фиг.10 и 11, представляющий сигнал акустической волны (волны давления) с удаленным движением платформы;
Фиг.13 изображает одну версию сейсмической системы по фиг.7, в который датчики движения расположены внутри различных конструкций, которые предоставляют различные акустические импедансы;
Фиг.14А и 14В изображают поперечные сечения еще одной сейсмической системы по фиг.7, содержащей множество датчиков движения, осесимметрично расположенных в сейсмоприемной косе;
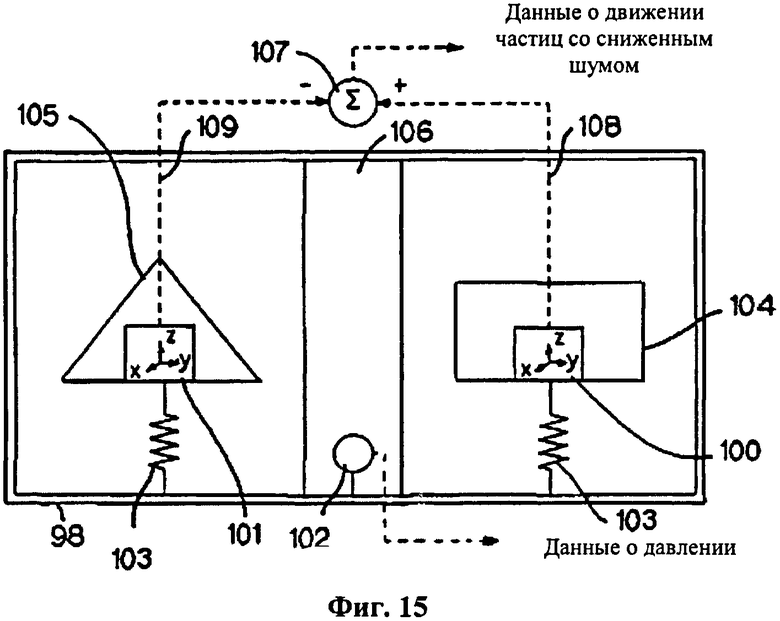
Фиг.15 изображает еще одну версию сейсмической системы по фиг.7, в которой каждый датчик движения обладает различным эффективным сечением рассеяния акустических волн для предоставления различных акустических откликов;
Фиг.16 изображает альтернативную версию сейсмической системы по фиг.15 с более высоким коэффициентом усиления;
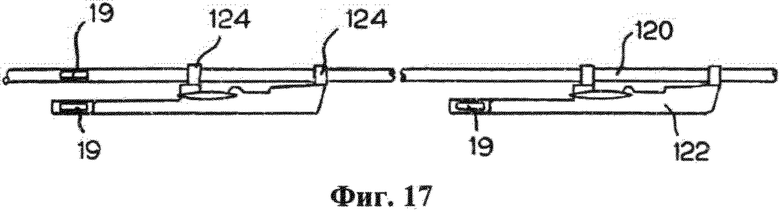
Фиг.17 изображает боковую вертикальную проекцию сейсмической системы по фиг.7, установленной на гондолах для позиционирования кабеля, подвешенных с возможностью вращения на сейсмоприемной косе; и
Фиг.18 изображает вид сбоку сейсмической системы по фиг.7, установленной на гондоле для позиционирования кабеля, присоединенной на одной линии между секциями сейсмоприемной косы.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг.7 изображает блок-схему общей версии подводной сейсмической системы 19, воплощающей признаки изобретения, которая содержит технические средства для использования датчиков движения или датчиков в сборе, с различными откликами на сигналы, вызванные звуковой волной, и подобными откликами на движение платформы, например сейсмоприемной косы, кабеля или автономного узла для улучшения отношения сигнал-шум данных, полученных для сейсмического изображения. На фиг.7 два датчика 40, 41 движения и один датчик давления 42, как правило, гидрофон, предоставляют сигналы, которые объединяют для получения сигнала со сниженным шумом и режекцией волны-спутника. Группа датчиков давления может быть использована вместо датчика сигнала, например, для снижения шума, вызванного волнами давления, распространяющимися вдоль оси сейсмоприемной косы. В идеале, датчики движения чувствительны к постоянному току и способны разлагать на составляющие вектор силы тяжести; в ином случае, используется дополнительный датчик направленности. Первый датчик 40 движения обладает откликом на акустические волны, который в идеале, но необязательно, равен подобному отклику морской воды; его отклик может быть увеличен относительно отклика морской воды, если необходим больший коэффициент усиления. Второй датчик 41 движения обладает откликом на акустические волны, который измеримо отличается от отклика первого датчика 40 движения. Данное отличие акустического отклика может быть реализовано с помощью отличий в составе материала или в геометрической конфигурации датчиков. Во всех версиях системы материал и геометрические свойства обоих датчиков выбраны таким образом, чтобы их механические отклики на движение платформы совпадали. Например, если каждый датчик движения предназначен для взаимодействия с кабелем таким же образом, что и система масс и пружин второго порядка, то массы (включая присоединенную массу, при необходимости) датчиков и жесткости их соответствующих пружин уравнены. Первые и вторые выходные данные 44, 45 первого и второго датчиков 40, 41 движения вычитают 46 либо локально, либо после удаленной обработки для создания сигнала 48 отклика со сниженным шумом, обозначающим движение частиц из-за акустических волн с ослабленным движением платформы. Блок 46 вычитания составляет одно средство объединения сигнала первого датчика и сигнала второго датчика. Если сигнал одного из датчиков противоположен по фазе, то средство объединения сигнала первого датчика и сигнала второго датчика будет реализовано в виде блока сложения. Отклик со сниженным шумом масштабируют 50 для соответствия отклику 52 датчика давления, например сигналу гидрофона, и используют в средстве 54 p-z суммирования для создания окончательного выходного сигнала 56, который также режектирует провалы, вызванные волнами-спутниками, и кратные волны. Средство объединения сигнала первого датчика и сигнала второго датчика и средство p-z-суммирования могут быть реализованы локально с помощью аналоговых схем, с помощью цифровых логических схем или алгоритмическим способом в микропроцессоре, удаленно в бортовом компьютере или в ходе автономной обработки данных.
На фиг.8 изображена блок-схема двух датчиков 40, 41 движения по фиг.7 в частотной области, обозначающая их передаточные функции к компоненту 58 акустической волны падающей энергии. Компонент акустической волны включает в себя важные сейсмические сигналы. Первый датчик 40 и второй датчик 41 обладают неравными передаточными функциями H1(s) и H2(s) акустической волны. Передаточная функция H1(s) чувствительна к движению частиц акустической волны, так что первый датчик 40 создает выходной отклик O1(s), который представляет собой движение частиц. Передаточная функция H2(s) не чувствительна к движению частиц акустической волны, и второй датчик 41 создает выходной отклик O2(s), который не включает в себя движение частиц окружающей акустической среды. На фиг.9 изображена блок-схема двух датчиков 40, 41 движения по фиг.7 в частотной области, обозначающая их передаточные функции к компоненту 59 движения платформы падающей энергии. Передаточные функции H3(s) и H4(s) двух датчиков 40, 41 движения к движению платформы пропорциональны (или равны) по амплитуде, но могут быть противоположны по фазе. Таким образом, оба датчика 40, 41 обладают подобными выходными откликами O3(s) и O4(s) на движение платформы. Составные передаточные функции первого и второго датчиков 40, 41 движения к падающей энергии являются сочетанием H1(s) и H3(s) для первого датчика и сочетанием H2(s) и H4(s) для второго датчика. Составные отклики двух датчиков являются сочетаниями O1(s) и O3(s) для первого датчика движения и сочетаниями O2(s) и O4(s) для второго датчика движения. Фиг.10 изображает пример во временной области отклика первого датчика 40 на падающую энергию, которая содержит как движение платформы, так и акустические волны. Отклик 44 первого датчика чувствителен как к шуму платформы, так и к акустической волне. На фиг.11 изображен соответствующий отклик второго датчика 41 на ту же падающую энергию. Отклик 45 второго датчика чувствителен лишь к компоненту падающей энергии, представляющий собой шум платформы. На фиг.12 изображен результат сочетания откликов двух датчиков путем вычитания выходных данных 45 второго датчика из выходных данных 44 первого датчика для создания сигнала 48 акустической волны с вычтенным шумом по фиг.7. Хотя для упрощения описания отклик второго датчика на волны давления был принят равным нулю, он может обладать небольшим откликом, или даже отрицательным откликом, на волны давления. Кроме того, выходные данные первого и второго датчиков могут не полностью соответствовать вибрациям сейсмоприемной косы. Но даже в этих случаях результатом вычитания сигнала по-прежнему является отклик акустической волны с сильно ослабленным откликом на движение платформы, который может быть масштабирован и соединен с данными гидрофона путем p-z суммирования.
Различные определенные версии общей системы, указанной на блок-схемах по фиг.7-9, используют различные уровни акустического импеданса для достижения желаемой разницы в отклике на акустические импульсы. Как описано выше, два датчика 40, 41 движения и датчик давления 42 установлены в платформе, на ней или присоединены к ней. Например, они могут быть заключены в подводной сейсмоприемной косе или установлены внутри гондолы для позиционирования кабеля, прикрепленной к сейсмоприемной косе. Датчики движения акустически изолированы друг от друга, но расположены вблизи друг от друга и разделены на отдельные области с помощью разделителя, например. Первый датчик движения заключен в первой области с внешней частью, чей акустический импеданс подобен акустическому импедансу окружающей морской воды, так что акустические волны проникают сквозь внешнюю часть с минимальными отражениями и воздействуют на датчик. Второй датчик движения расположен внутри акустически непроницаемого ограждения во второй области и не подвержен воздействию падающих акустических волн. Сейсмоприемная коса, которая находится под растягивающим напряжением, обладает малым и непостоянным откликом на акустические волны. Любой отклик сейсмоприемной косы на акустические волны регистрируется как движение платформы. Следовательно, первый датчик обладает пропорциональным откликом на акустические волны; и второй датчик обладает незначительным откликом. Дополнительно, датчики в сборе откалиброваны таким образом, чтобы обладать совпадающими откликами на движения платформы (например, на вибрации сейсмоприемной косы), например, путем уравнивания их масс (включая присоединенную массу, при необходимости) и жесткости соответствующих пружин, если они ведут себя как системы масс и пружин второго порядка. Вычитание сигнала второго датчика, которое выполняется либо локально, либо после удаленной обработки, из сигнала первого датчика соответственно дает в результате требуемый сигнал акустической волны с сильно ослабленным откликом на движение сейсмоприемной косы.
Одна конкретная версия сейсмической системы по фиг.7-9 изображена на фиг.13 с двумя датчиками 60, 61 движения, акустически разделенными центральным разделителем 64, и датчиком 62 давления. Первый датчик 60 движения содержится в первой области 66 сейсмоприемной косы с жесткой звукопроницаемой внешней частью 68. Например, внешняя часть 68 является перфорированным жестким корпусом, покрытым гибкой звукопроницаемой оболочкой 70. Внутренняя часть первой области 66 заполнена жидкостью. В идеале, как оболочка, так и жидкость обладают акустическими импедансами, равными импедансу окружающей морской воды. Первый контрольный груз 72 с акустическим откликом, который в идеале, но необязательно, равен акустическому отклику жидкости, подвешен в жидкости; его отклик может быть увеличен относительно отклика морской воды, если необходим больший коэффициент усиления. Первый контрольный груз 72 соединен с внешней частью сейсмоприемной косы с помощью датчика смещения, скорости или ускорения, который служит датчиком движения. Первый датчик 60 использует внешнюю часть сейсмоприемной косы в качестве системы отсчета и выступает в роли пружины в динамическом соединении контрольного груза и сейсмоприемной косы. Первый датчик может быть монокристаллом или изгибным пьезодатчиком, например. Если датчик является одноосным датчиком, системы с несколькими контрольными грузами могут использоваться для создания трехосного датчика, при этом все контрольные грузы должны быть откалиброваны таким образом, чтобы как их акустические, так и динамические отклики совпадали. Альтернативой многоосному измерению является присоединение нескольких датчиков к общему контрольному грузу для многоосного измерения, при условии, что отклики датчиков масс могут оставаться независимыми. Второй датчик 61 и второй контрольный груз 73 соединены в узел во второй области 67 на стороне разделителя от первой области 66. Узел второго датчика отличается от узла первого датчика тем, что внешняя часть 69 его корпуса обладает акустическим импедансом, который намного больше импеданса окружающей морской воды, и его внутренняя часть 67 заполнена воздухом для того, чтобы учитывать любую значительную упругость во внешней части 69 корпуса. Жесткость корпуса второго датчика усиливает воздействия его увеличенного акустического импеданса, что позволяет корпусу выступать в роли акустического экрана, аналогично клетке Фарадея в электромагнетизме. Акустический импеданс внешней части 69 второго корпуса задается материалом, обладающим достаточно высокой плотностью или скоростью звука.
Другая версия сейсмической системы, которая является осуществлением изобретения, изображена на фиг.14А и 14В с двумя комплектами 80, 81 датчиков движения и датчиком 82 давления. В данной версии первый комплект 80 датчиков и второй комплект 81 датчиков присоединены к одному твердому телу 84, которое передает вибрации сейсмоприемной косы. Твердое тело содержит первую часть 86 с большим диаметром, вторую часть 87 с меньшим диаметром и переходную секцию 88, объединяющую первую и вторую части. Часть 87 с меньшим диаметром имеет трубчатую форму и содержит внутреннюю сторону 83 и внешнюю сторону 85. Первый комплект 80 датчиков окружает секцию второй части 87 твердого тела 84 и соединен с его внешней стороной 85. Три или более отдельных датчиков могут составлять первый комплект 80. Если осевая симметрия не применяется, то первый комплект 80 датчиков располагается вместо этого вдоль твердого тела. Звукопроницаемая внешняя часть 90, которая может состоять из эластичной мембраны поверх перфорированного жесткого корпуса, отделяет систему датчиков от окружающей морской воды. Первая полость 92, расположенная между второй частью 87 твердого тела 84 и внешней частью 90, заполнена жидкостью. В идеале, внешняя часть 90 и жидкость обладают акустическими импедансами, равными акустическому импедансу окружающей морской воды. Первый контрольный груз 94 с акустическими свойствами, подобными акустическим свойствам первого контрольного груза по фиг.13, подвешен в первой полости 92 и окружает вторую часть 87 твердого тела 84. Первый контрольный груз 94 механически соединен с внешней стороной 85 твердого тела 84 с помощью первого комплекта 80 датчиков движения со свойствами, подобными свойствам первого датчика 60 в версии по фиг.13, но с твердым телом 84 в качестве их системы отсчета. Вторая полость 93 целиком содержится внутри трубчатой второй части 87 твердого тела 84. Вторая полость 93 содержит второй контрольный груз 95, подвешенный в жидкости и соединенный с твердым телом 84 с помощью второго комплекта 81 датчиков движения, соединенного с внутренней стороной 83 твердого тела. Динамический отклик второго комплекта 81 датчиков откалиброван таким образом, чтобы обладать откликом на вибрации сейсмоприемной косы, который совпадает с откликом первого комплекта 80. Однако, в отличие от первого контрольного груза 94, не установлены какие-либо требования к акустическому отклику второго контрольного груза 95. Твердое тело 84 само выступает в роли акустического экрана для второго комплекта 81 датчиков и состоит из материала, обладающего относительно высоким акустическим импедансом. Преимущество данной соосной компоновки заключается в том, что множество отдельных датчиков чувствительно к ускорениям каждого контрольного груза. Сочетание выходных сигналов датчиков движения приводит к более надежному подсчету фактических значений ускорения. Как изображено, первый и второй комплекты 80, 81 датчиков чувствительны к радиальному движению; дополнительная система тестовых грузов и датчиков может быть включена в каждую полость и выровнена относительно оси сейсмоприемной косы, если необходима трехосевая чувствительность.
Еще одна версия сейсмической системы изображена на фиг.15. Сейсмоприемная коса с жесткой звукопроницаемой внешней частью 98 содержит два датчика 100,101 движения, такие как чувствительные к постоянному току, трехосевые акселерометры, и один датчик 102 давления, такой как гидрофон. Внешняя часть 98 может содержать, например, перфорированный жесткий корпус, покрытый гибкой звукопроницаемой оболочкой. Акселерометры могут быть реализованы с помощью микроэлектромеханической системы (MEMS), пьезодатчика, монокристалла или любой другой технологии с подобной полезностью. Датчики 100, 101 движения жестко соединены с первым и вторым жестким корпусом 104, 105 для того, чтобы позволить непосредственное измерение любого динамического движения сейсмоприемной косы. Оба датчика акустически присоединены к внешней части 98 кабеля, но акустически изолированы друг от друга, например, центральным разделителем 106. Как первый, так и второй корпус 104, 105 устроены таким образом, что масса первого корпуса плюс масса, которая заключена внутри него, равна массе второго корпуса плюс масса, которая заключена внутри него. Динамические соединения 106 между корпусами и внешней частью 98 сейсмоприемной косы спроектированы таким образом, чтобы выступать в роли систем масс и пружин второго порядка с равными значениями жесткости пружин, с тем чтобы сохранить равенство отношений масс и пружин. С другой стороны, корпуса обладают различными эффективными сечениями рассеяния акустических волн, так что они генерируют различные отклики на акустические волны давления. Конкретнее, первый датчик 100 генерирует сигнал 108 первого датчика, который является хорошим представлением движения акустических частиц; второй датчик 101 создает сигнал 109 второго датчика, который в значительной степени не чувствителен к акустическим волнам. Корпуса датчиков обладают различной геометрией и, возможно, также изготовлены из различных материалов для воздействия на различные сечения и, таким образом, на различные передаточные функции для каждого датчика. Сигнал 109 второго датчика вычитают 107 из сигнала 108 первого датчика либо локально, либо после удаленной обработки для предоставления требуемого сигнала волны давления с сильно ослабленным откликом на движение сейсмоприемной косы. Поропласт с открытыми порами может служить, например, динамическим соединением 106 между каждым корпусом 104, 105 и внешней частью 98. Поропласт заполнен жидкостью и откалиброван таким образом, чтобы соответствовать акустическому импедансу окружающей морской воды, и также может служить звукопроницаемым акустическим соединением. В данном примере, первый корпус 104 герметично закрыт, не пропуская жидкость, и заполнен воздухом для того, чтобы учитывать любую значительную упругость в корпусе; и второй корпус 105 является перфорированным или содержит прорези, может заполняться окружающей жидкостью. Итоговое неравенство общей плотности между корпусами является причиной их различных откликов на падающие волны давления.
Модифицированная версия сейсмической системы по фиг.15, предназначенная для увеличения общего коэффициента усиления системы, изображена на фиг.16. Первый датчик 110 обладает акустическим и динамическим поведением, подобным поведению первого датчика 100 по фиг.15. Второй датчик 111 создает отклик на волны давления, который совпадает с подобным откликом первого датчика 110, и отклик на движение сейсмоприемной косы имеет равную амплитуду, но противоположную полярность относительно амплитуды и полярности первого датчика. Конструкции первого корпуса 114 и второго корпуса 115, как изображено на фиг.15, особенно в отношении эффективного сечения рассеяния акустических волн и плотности, выполнены таким образом, что они обладают подобным откликом масс и пружин на движение кабеля, но также обладают измеримо различным откликом на падающие акустические волны давления. Второй корпус 115 дополнительно содержит контрольный груз 116, который предназначен для совершения колебаний в жидкости и обладает откликом на акустическую волну, совпадающим с подобным откликом первого корпуса 114. С другой стороны, отклик контрольного груза на движение сейсмоприемной косы намного меньше подобного отклика корпусов, поскольку контрольный груз подвешен в жидкости и корпуса соединены механически с внешней частью кабеля. Контрольный груз 116 не жестко соединен со вторым корпусом 115 с помощью датчика 111 смещения, движения или ускорения, который использует второй корпус в качестве системы отсчета. В данном примере консольный акселерометр, состоящий из пьезоэлектрических материалов, используется в качестве датчика движения. Множество акселерометров может использоваться для создания трехосевого датчика, при этом каждый контрольный груз откалиброван таким образом, чтобы совпадать с акустическим откликом первого корпуса 114 по соответствующей оси. Волны давления, которые придают движение контрольному грузу 116, но не второму корпусу 115, таким образом, обнаруживаются положительно, то есть в фазе. Поэтому сигналы давления от первого датчика 110 и второго датчика 111 совпадают как по амплитуде, так и знаку. Напротив, вибрации сейсмоприемной косы, которые воздействуют на второй корпус 115, но не на контрольный груз 116, обнаруживаются отрицательно, т.е. противоположными в фазе. Поэтому сигналы вибрации от датчиков совпадают по амплитуде, но имеют различные знаки. В данном случае, сигналы от двух датчиков 110, 111 сочетают путем сложения 118, а не вычитания, для создания значительно уменьшенного отклика на движение сейсмоприемной косы и одновременное увеличение коэффициента усиления отклика акустической волны. В качестве альтернативы может использоваться другой консольный контрольный груз в первом корпусе 114. Однако, из-за того, что сигнал первого датчика будет также иметь обратную полярность, его необходимо соединить с сигналом второго датчика путем вычитания, а не сложения.
Как изображено на фиг.17, часть сейсмической системы 19, содержащая датчик, может быть установлена внутри кабеля 120 сейсмоприемной косы или внутри устройства для позиционирования кабеля, такого как гондола 122 для выравнивания кабеля или для направления кабеля, прикрепленного с возможностью вращения к сейсмоприемной косе с помощью хомутов 124. Как изображено на фиг.18, устройство 126 позиционирования кабелей, присоединенное на одной линии между передней и задней секцией 128, 129 сейсмоприемной косы, может вмещать часть сейсмической системы 19, содержащую датчик. Разумеется, датчики могут быть установлены на других устройствах, которые могут быть присоединены внутри или снаружи сейсмоприемной косы, донного кабеля или автономного узла.
Трехосный акселерометр с откликом на постоянный ток, подобным датчику VectorSeis, который производится компанией ION Geophysical Corporation из г.Хьюстон, Техас, США, подходит для многих вариантов осуществления изобретения. Поскольку в сейсмическом импульсе нет компонента постоянной составляющей тока, отклик датчика движения на постоянный ток используется для определения направленности датчика относительно силы тяжести. Одна ось датчика спроектирована таким образом, чтобы находиться в известном направлении относительно оси сейсмоприемной косы. Поскольку направление оси сейсмоприемной косы является известным, а вектор силы тяжести можно измерить, направленность датчика и, следовательно, поступающий определяемый сейсмический импульс могут обладать электронным вращением относительно силы тяжести, так что направленные вверх сейсмические импульсы могут быть приняты, а направленные вниз сейсмические импульсы могут быть режектированы.
Могут использоваться любые датчики, определяющие движение. Датчики могут быть любыми датчиками движения, чувствительными к расположению, скорости или ускорению. Например, первый геофон на карданном подвесе, как описано Tenghamn et al. в патенте США №. 7,239,577, может сочетаться со вторым геофоном, укомплектованным таким образом, что он обладает небольшим или нулевым откликом на акустическую волну и таким же откликом на движение сейсмоприемной косы, для достижения желаемого результата.
Могут использоваться пьезоэлектрические акселерометры, при условии, что они обладают подходящими техническими характеристиками датчиков.
Если датчик не может определить собственную направленность, в систему датчиков могут быть включены отдельные датчики направленности. В качестве альтернативы, механические средства, такие как карданная система, могут использоваться для закрепления датчиков в известном направлении. Устройства, снабженные крыльями и присоединенные к сейсмоприемной косе, которые иногда называют гондолами, также могут использоваться для придания датчику желаемой направленности.
Использование изобретения не должно ограничиваться использованием буксируемых морских сейсмоприемных кос. Описанные методики также могут быть использованы на других платформах, таких как донные кабели и системы автономных узлов. Дополнительно, описанные системы датчиков могут применяться для индивидуального сбора сейсмических данных; или они могут быть связаны вместе и использоваться совместно, при этом их данные будут соединены для снижения воздействия местной картине течений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКИЙ ДАТЧИК С ДАТЧИКАМИ ПЕРЕМЕЩЕНИЯ СНИЖЕНИЯ ШУМА | 2014 |
|
RU2678261C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК АКУСТИЧЕСКИХ ВОЛН И СПОСОБЫ | 2011 |
|
RU2562711C2 |
| СИСТЕМА ШУМОПОДАВЛЕНИЯ СО СДВОЕННЫМ ДАТЧИКОМ ДЛЯ ПОДВОДНОЙ СЕЙСМОПРИЕМНОЙ КОСЫ | 2011 |
|
RU2569414C2 |
| ОСЛАБЛЕНИЕ ВОЛН-СПУТНИКОВ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2005 |
|
RU2418308C2 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ ДЛЯ ПОДАВЛЕНИЯ МНОГОКРАТНЫХ ПЕРЕОТРАЖЕНИЙ | 1994 |
|
RU2116657C1 |
| УСТРОЙСТВО И СПОСОБ ПОДАВЛЕНИЯ ДИНАМИЧЕСКОГО ПОВЕДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2705512C2 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2003 |
|
RU2334999C2 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714519C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2616650C2 |












Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Заявлена подводная сейсмическая система для снижения шума в сейсмических сигналах, вызванного отраженными волнами-спутниками или движением сквозь толщу воды. Система содержит два датчика движения. Один датчик обладает первым откликом и чувствителен к шуму, вызванному движением платформы, а также к акустическим волнам. Второй датчик обладает другой конструкцией, которая изолирует его от акустических волн, так что его отклик связан в основном с шумом, вызванным движением. Выходные данные откликов двух датчиков соединяют для того, чтобы устранить воздействия шума, вызванного движением. При дальнейшем соединении с сигналом гидрофона, шум, вызванный отраженными волнами-спутниками, сокращается. Технический результат - повышение точности разведочных данных. 13 з.п. ф-лы, 19 ил.
1. Подводная сейсмическая система, содержащая:
первый датчик движения, который используется на подводной платформе и обладает первым акустическим импедансом или первым эффективным сечением рассеяния акустических волн для создания сигнала первого датчика, представляющего движение платформы и движение частиц, вызванное акустическими волнами;
второй датчик движения, расположенный вблизи от первого датчика движения и обладающий вторым акустическим импедансом или вторым эффективным сечением рассеяния акустических волн, при этом второй акустический импеданс отличается от первого акустического импеданса, или второе эффективное сечение рассеяния акустических волн отличается от первого эффективного сечения рассеяния акустических волн, для создания сигнала второго датчика, представляющего движение платформы и представляющего ослабленное движение частиц, вызванное акустическими волнами;
средство объединения сигнала первого датчика и сигнала второго датчика для ослабления шума, вызванного движением платформы, и создания отклика на движение частиц, вызванное акустическими волнами.
2. Подводная сейсмическая система по п.1, дополнительно содержащая разделитель, расположенный между первым и вторым датчиками движения для звуковой изоляции первого датчика движения от второго датчика движения.
3. Подводная сейсмическая система по п.1, дополнительно содержащая:
твердое тело, соединенное с подводной платформой и подверженное воздействию движения платформы;
множество первых датчиков движения, соединенных с твердым телом, и множество вторых датчиков движения, соединенных с твердым телом.
4. Подводная сейсмическая система по п.1, содержащая:
твердое тело, соединенное с подводной платформой и подверженное воздействию движения платформы;
звукопроницаемую внешнюю часть, окружающую первый датчик движения, второй датчик движения и твердое тело и находящуюся в контакте с морской водой;
первый контрольный груз и второй контрольный груз;
где твердое тело делит сейсмическую систему на внешнюю область, вмещающую первый контрольный груз, и внутреннюю область, вмещающую второй контрольный груз; и
где первый датчик движения соединяет первый контрольный груз со звукопроницаемой внешней частью, а второй датчик движения соединяет второй контрольный груз с твердым телом.
5. Подводная сейсмическая система по п.4, в которой первый датчик движения также соединяет первый контрольный груз с твердым телом.
6. Подводная сейсмическая система по п.1, дополнительно содержащая:
первый жесткий корпус, жестко присоединенный к первому датчику движения;
второй жесткий корпус, жестко присоединенный ко второму датчику движения;
разделитель, расположенный между первым и вторым жестким корпусом для звуковой изоляции первого и второго датчиков движения в отдельных первой и второй областях;
где первый и второй корпусы обладают различными эффективными сечениями рассеяния акустических волн по отношению к падающим акустическим волнам.
7. Подводная сейсмическая система по п.6, содержащая:
внешнюю часть, окружающую первую и вторую области;
первое соединение между первым жестким корпусом и внешней частью и
второе соединение между вторым жестким корпусом и внешней частью.
8. Подводная сейсмическая система по п.7, где первое и второе соединения содержат материал из поропласта с открытыми порами.
9. Подводная сейсмическая система по п.1, дополнительно содержащая:
первый жесткий корпус, жестко присоединенный к первому датчику движения;
второй жесткий корпус для второго датчика движения;
контрольный груз, расположенный внутри второго жесткого корпуса и эластично присоединенный ко второму жесткому корпусу с помощью второго датчика движения;
где первый и второй датчики движения производят отклики, совпадающие в фазе для акустических волн и противоположные в фазе для движения платформы.
10. Подводная сейсмическая система по п.1, дополнительно содержащая гидрофон, отправляющий сигнал гидрофона для сочетания с откликом со сниженным шумом для устранения кратных волн или ослабления отклика на волны-спутники.
11. Подводная сейсмическая система по п.10, где гидрофон и первый и второй датчики движения расположены вблизи друг от друга.
12. Подводная сейсмическая система по п.1, где первый акустический импеданс равен акустическому импедансу морской воды.
13. Подводная сейсмическая система по п.1, содержащая кабель с размещенными на нем датчиками, который служит в качестве подводной платформы, где множество первых и вторых датчиков движения расположено вдоль кабеля с размещенными на нем датчиками в удаленных друг от друга местах.
14. Подводная сейсмическая система по п.1, содержащая устройство позиционирования кабелей или автономный узел, служащие в качестве подводной платформы, где первый и второй датчики движения установлены в устройстве позиционирования кабелей или автономном узле.
| US 6512980 B1, 28.01.2003 | |||
| US 20090122641 A1, 14.05.2009 | |||
| US 2007297287 A1, 27.12.2007 | |||
| US 2009040872 A1, 12.02.2009 | |||
| US 2009161487 A1, 25.06.2009 | |||
| US 2006239117 A1, 26.10.2006 |

