Изобретение относится к области электротехники, а точнее к линейному электроприводу, и предназначено для использования в робототехнике и приводе станков.
Известен линейный асинхронный электропривод (ЛАЭП) / патент РФ №2067350; кл. Н02К 41/025, Н02Р 7/62, 1996 г., содержащий индуктор, состоящий из отдельных сердечников с обмотками. Ограниченные функциональные возможности - недостаток данного электропривода.
Наиболее близким по своей технической сущности к заявляемому является линейный асинхронный электропривод /см. патент РФ №2259001, кл. Н02К 41/025, Н02Р 7/62, 2003 г./, содержащий индуктор, состоящий из n сердечников с катушками многофазной обмотки и электропроводящий якорь. Катушки каждого из сердечников имеют до середины ряда прямой, а после середины - противоположный порядок следования фаз.
Этот электропривод имеет сложную конструкцию. Это недостаток прототипа.
Технической задачей настоящего изобретения является устранение отмеченного недостатка.
Решение технической задачи достигается тем, что в линейном асинхронном электроприводе, содержащем индуктор, состоящий из n параллельно расположенных сердечников с катушками многофазной (трехфазной) обмотки, каждая из которых охватывает по одному зубцу сердечника, при этом катушки обмотки каждого из n сердечников имеют до середины ряда прямой, а после середины - противоположный порядок следования фаз и электропроводящий якорь, расположенный поверх активной стороны индуктора, согласно изобретению n - четное число, причем  из n сердечников снабжены зубчатыми рейками, закрепленными на тыльной их стороне (стороне, противоположной активной) и находящимися в зацеплении с зубчатыми колесами, ось которых связана с приводом их поворота.
из n сердечников снабжены зубчатыми рейками, закрепленными на тыльной их стороне (стороне, противоположной активной) и находящимися в зацеплении с зубчатыми колесами, ось которых связана с приводом их поворота.
В дальнейшем изобретение поясняется примером его конкретного выполнения со ссылками на фиг.1-4:
фиг.1 изображает общий вид линейного асинхронного электропривода (вид спереди);
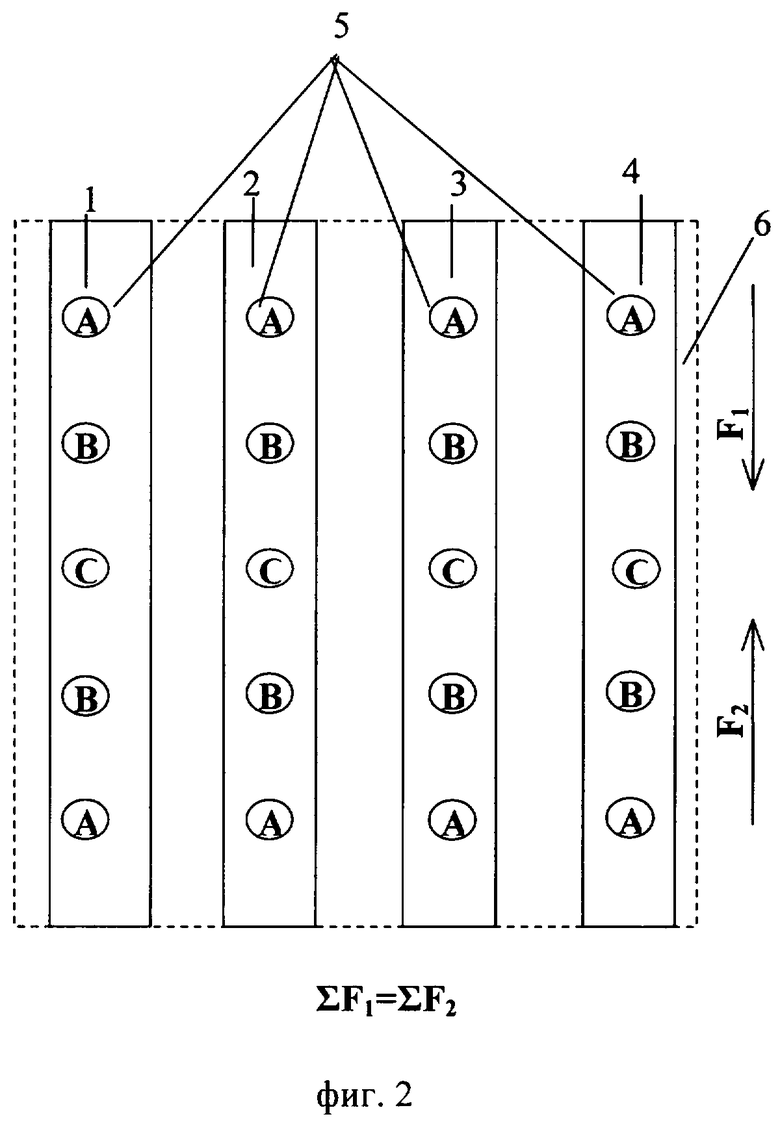
фиг.2 - порядок подключения катушек обмоток всех сердечников к источнику трехфазного напряжения;
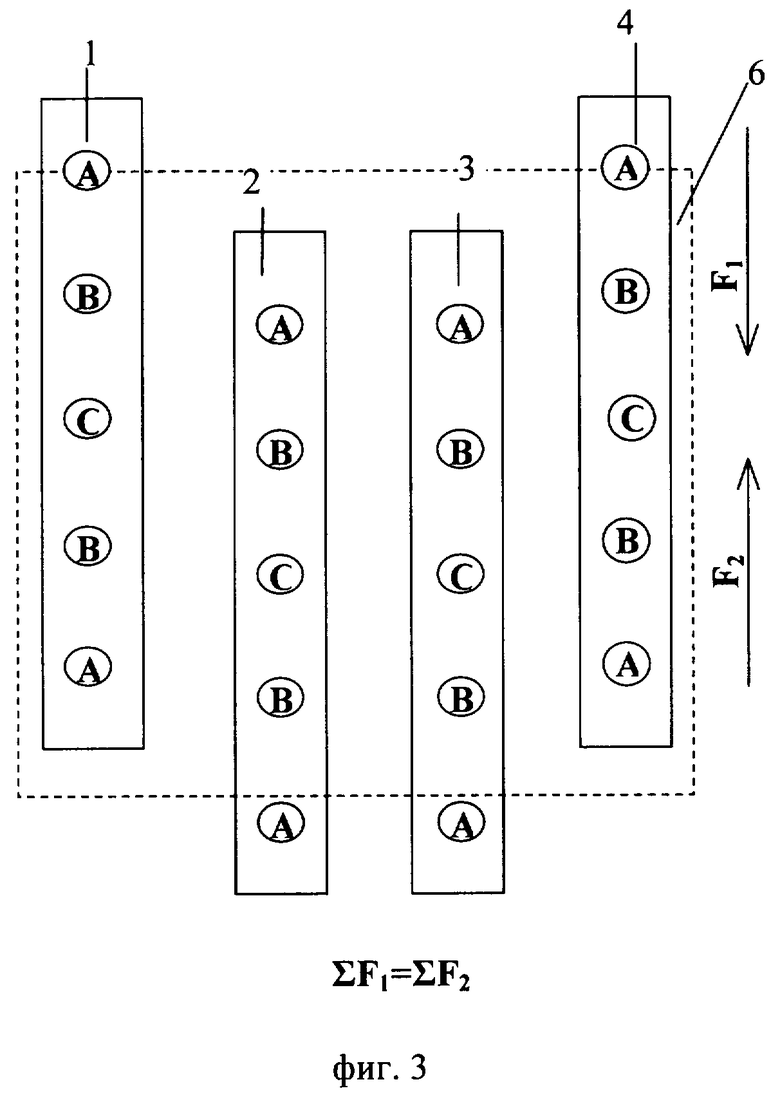
фиг.3 - то же, но при смещении второго и третьего сердечников сверху вниз на одно зубцовое деление для совершения шага электропроводящего якоря в продольном направлении;
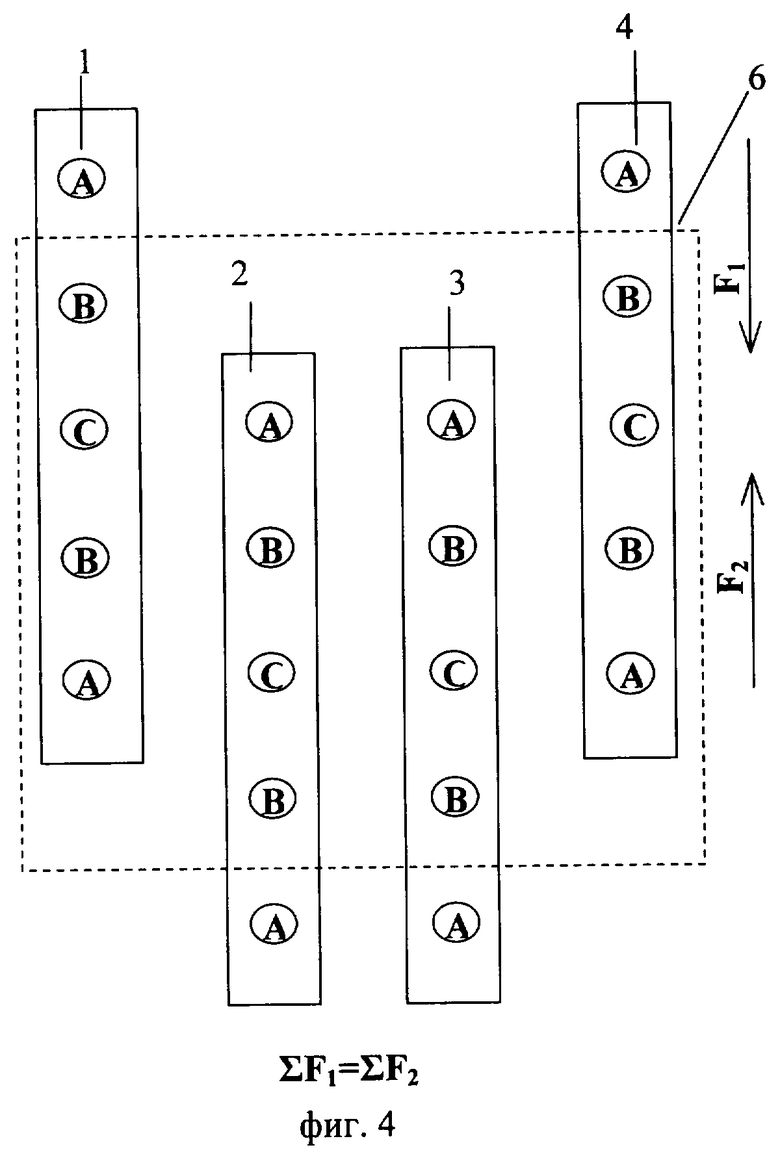
фиг.4 - то же, но при смещении второго и третьего сердечников сверху вниз на два зубцовых деления для совершения шага электропроводящего якоря в продольном направлении.
Линейный асинхронный электропривод (фиг.1) содержит индуктор, состоящий из сердечников 1, 2, 3, 4 с катушками 5, электропроводящий якорь 6, опирающийся на шаровые опоры 7. Второй 2 и третий 3 сердечники снабжены зубчатыми рейками 8, находящимися в зацеплении с зубчатыми колесами 9, ось 10 которых связана с приводом их поворота 11 и блоком управления 12. Ось 10 зубчатых колес 9 расположена в подшипниках 13.
На фиг.2 показан схематически фрагмент индуктора ЛАЭП (вид сверху), состоящего из четырех сердечников 1, 2, 3, 4 с катушками 5 обмотки. Электропроводящий якорь 6 изображен на фиг.2 штриховой линией. На этой фигуре показан порядок подключения катушек 5 сердечников 1, 2, 3, 4 к фазам источника трехфазного напряжения (А, В и С). Видно, что в продольном направлении (сверху вниз) подключенные катушки обмоток сердечников образуют до середины прямой (А, В, С; А, В, С; А, В, С) порядок следования фаз, а после середины - противоположный (С, В, А; С, В, А; С, В, А) порядок следования фаз. Усилия F1 и F2, действующие на электропроводящий якорь 6, обозначены стрелками.
Фиг.3 - то же, но при смещении второго и третьего сердечников на одно зубцовое деление в продольном направлении (сверху вниз) для совершения шага электропроводящего якоря на 1/2 зубцового деления в продольном направлении.
Фиг.4 - то же, но при смещении второго и третьего сердечников на два зубцовых деления в продольном направлении (сверху вниз) для совершения шага электропроводящего якоря на одно зубцовое деление в продольном направлении.
Рассмотрим работу данного ЛАЭП. До совершения первого шага электропроводящего якоря в продольном направлении (сверху вниз) на 1/2 зубцового деления (фиг.2) к источнику напряжения подключены катушки обмоток индуктора электропривода, состоящего из четырех сердечников. В продольном направлении (сверху вниз) подключенные катушки обмоток образуют ряды, имеющие до середины прямой (А, В, С; А, В, С; А, В, С) порядок следования фаз, а после середины - противоположный (С, В, А; С, В, А; С, В, А) порядок следования фаз. Создаются симметричные встречно бегущие магнитные поля в продольном направлении, возбуждаемые токами, протекающими по системам катушек 5 всех сердечников: А, В, С; А, В, С; А, В, С; и С, В, А; С, В, А; С, В, А. Бегущие навстречу друг другу магнитные поля пересекают электропроводящий якорь 6 и наводят в нем электродвижущие силы, вызывающие протекание вихревых токов. При взаимодействии бегущих магнитных полей с вихревыми токами создаются механические встречно направленные усилия F1 и F2, действующие на электропроводящий якорь 6 (фиг.2). Эти усилия уравновешивают друг друга и удерживают электропроводящий якорь 6 в первоначальном положении  .
.
Для совершения шага электропроводящего якоря 6, например, на 1/2 зубцового деления (фиг.3) смещаем второй и третий сердечники путем поворота зубчатых колес 9 на одно зубцовое деление сверху вниз в продольном направлении. В продольном направлении (сверху вниз) (фиг.3) бегущие магнитные поля возбуждаются токами, протекающими по системам катушек обмоток 5 индуктора: первого сердечника - (А, В, С); второго сердечника - (А, В, С); третьего сердечника - (А, В, С); четвертого сердечника - (А, В, С), имеющим до середины прямой порядок следования фаз, а магнитные поля, бегущие навстречу направленным снизу вверх, создаются токами, протекающими по системе катушек 5 обмоток индуктора: первого сердечника - (А, В, С); второго сердечника - (1/2А, В, С); третьего сердечника - (1/2А, В, С); четвертого сердечника - (А, В, С) имеющих такой же порядок следования фаз. Таким образом, магнитное поле во втором и третьем сердечниках, бегущее снизу вверх, является несимметричным («эллиптическим») и более слабым по сравнению с полем, бегущим сверху вниз. Бегущие навстречу друг другу магнитные поля пересекают электропроводящий якорь 6 и наводят в нем электродвижущие силы, вызывающие протекание вихревых токов в электропроводящем якоре 6. При взаимодействии бегущих магнитных полей с вихревыми токами создаются встречно направленные усилия F1 и F2 в каждом ряду обмоток сердечников. При этом усилия F2 будут меньше усилий F1 из-за слабого симметричного магнитного поля во втором и третьем сердечниках. Электропроводящий якорь 6 под действием разности этих сил (F=F1-F2) начнет двигаться сверху вниз. Это движение будет продолжаться до тех пор, пока встречно направленные усилия не станут равными по величине F1: (1/2A+A+A+1/2A); (B+B+B+B); (C+C+C+C);  и F2: (A+1/2A+1/2А+А); (В+В+В+В); (С+С+С+С);
и F2: (A+1/2A+1/2А+А); (В+В+В+В); (С+С+С+С);  .
.
Равновесие усилий  наступает по завершению шага электропроводящего якоря на 1/2 зубцового деления (фиг.3). Эти усилия фиксируют электропроводящий якорь 6 в новом положении (фиг.3). В этот момент на якорь будут действовать усилия продольной стабилизации, позволяющие обеспечить его фиксацию.
наступает по завершению шага электропроводящего якоря на 1/2 зубцового деления (фиг.3). Эти усилия фиксируют электропроводящий якорь 6 в новом положении (фиг.3). В этот момент на якорь будут действовать усилия продольной стабилизации, позволяющие обеспечить его фиксацию.
Для совершения шага электропроводящего якоря на одно зубцовое деление (фиг.4) смещаем второй и третий сердечники поворотом зубчатых колес 9 на два зубцовых деления сверху вниз в продольном направлении. В продольном направлении (сверху вниз) (фиг.4) бегущие магнитные поля возбуждаются токами, протекающими по системам катушек обмоток 5 индуктора: первого сердечника - (1/2А, В); второго сердечника - (А, В, С); третьего сердечника -(А, В, С); четвертого сердечника - (1/2А, В, С) имеющими до середины прямой порядок следования фаз, а магнитные поля, бегущие навстречу направленным снизу вверх, создаются токами, протекающими по системе катушек 5 обмоток индукторов первого сердечника - (А, В, С); второго сердечника - (В, С); третьего сердечника - (В, С); четвертого сердечника - (А, В, С). Таким образом, магнитное поле во втором и третьем сердечниках, бегущее снизу вверх, является несимметричным и имеет «эллиптический» характер. Бегущие навстречу друг другу магнитные поля пересекают электропроводящий якорь 6 и наводят в нем электродвижущие силы, вызывающие протекание вихревых токов в электропроводящем якоре 6. При взаимодействии бегущих магнитных полей с вихревыми токами создаются встречно направленные усилия F1 и F2 в каждом ряду обмоток сердечников. При этом усилия F2 будут меньше усилий F1 из-за несимметричности магнитного поля во втором и третьем сердечниках. Электропроводящий якорь 6 под действием разности этих сил (F=F1-F2) начнет двигаться сверху вниз. Это движение будет продолжаться до тех пор, пока встречно направленные усилия не станут равными по величине F1: (0+A+A+0); (B+B+B+B); (C+C+C+C);  и F2:(А+0+А); (В+В+В+В); (С+С+С+С);
и F2:(А+0+А); (В+В+В+В); (С+С+С+С);  .
.
Равновесие усилий  наступает по завершению шага электропроводящего якоря 6 на одно зубцовое деление (фиг.4). Эти усилия фиксируют электропроводящий якорь 6 в новом положении (фиг.4). В этот момент на якорь будут действовать усилия продольной стабилизации, позволяющие обеспечить его фиксацию.
наступает по завершению шага электропроводящего якоря 6 на одно зубцовое деление (фиг.4). Эти усилия фиксируют электропроводящий якорь 6 в новом положении (фиг.4). В этот момент на якорь будут действовать усилия продольной стабилизации, позволяющие обеспечить его фиксацию.
При четном числе индукторов перемещение половины из них на любой шаг приводит к перемещению электропроводящего якоря на 1/2 этого шага. Число продольных шагов ЛАЭП может быть сколь угодно большим. По сравнению с прототипом упрощена конструкция ЛАЭП и расширен диапазон регулирования шага электропроводящего якоря, обеспечивающий более плавное его перемещение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2005 |
|
RU2279752C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2259001C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2377707C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2389125C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2461114C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2472275C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2494522C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2393617C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2358373C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2357349C1 |
Изобретение относится к электротехнике, к линейным асинхронным шаговым электроприводам для использования в робототехнике и приводе станков. Технический результат состоит в упрощении конструкции. Линейный асинхронный электропривод содержит индуктор, состоящий из сердечников с катушками, электропроводящий якорь, опирающийся на шаровые опоры. Второй и третий сердечники снабжены зубчатыми рейками, закрепленными на тыльной их стороне, то есть стороне, противоположной активной. Зубчатые рейки находятся в зацеплении с зубчатым колесом, ось 10 которого связана с приводом их поворота. К источнику напряжения подключены пять катушек обмотки каждого сердечника, образующих вдоль продольной оси индуктора ряды, в которых до середины - прямой, а после середины - противоположный порядок следования фаз. Для совершения шага электропроводящего якоря на зубцовое деление второй и третий сердечники смещают вниз на одно зубцовое деление. 4 ил.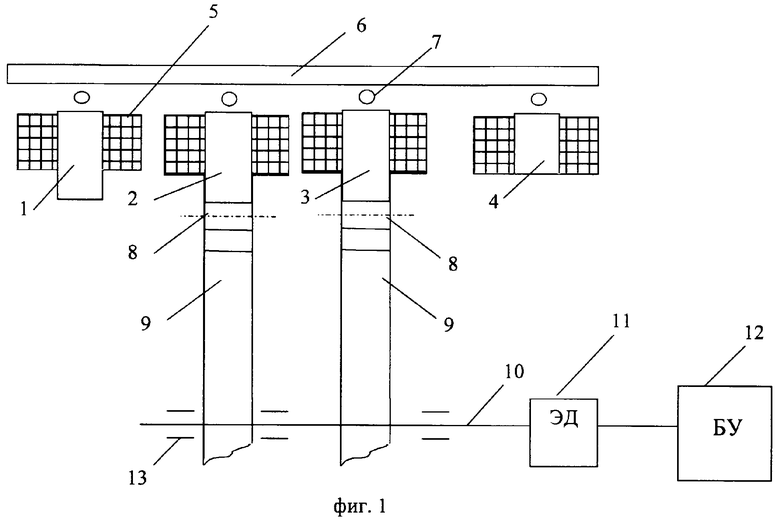
Линейный асинхронный электропривод, содержащий индуктор, состоящий из «n» параллельно расположенных сердечников, на зубцах которых размещены катушки многофазных (трехфазных) обмоток, причем катушки каждого из сердечников имеют до середины ряда прямой, а после середины - противоположный порядок следования фаз, и электропроводящий якорь, расположенный поверх активной стороны индуктора, отличающийся тем, что «n» - четное число, причем  из сердечников снабжены зубчатыми рейками, закрепленными на тыльной их стороне (стороне, противоположной активной), и находящимися в зацеплении с зубчатыми колесами, ось которых связана с приводом их поворота.
из сердечников снабжены зубчатыми рейками, закрепленными на тыльной их стороне (стороне, противоположной активной), и находящимися в зацеплении с зубчатыми колесами, ось которых связана с приводом их поворота.
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2067350C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2269193C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1991 |
|
RU2024168C1 |
| АППАРАТ ДЛЯ ХЕРЕСОВАНИЯ ВИНА В ПОТОКЕ | 0 |
|
SU161677A1 |
| US 6703806 А, 09.03.2004. | |||

