Текст описания приведен в факсимильном виде.


| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромотор-барабан лебедки | 1986 |
|
SU1463711A2 |
| Синхронная совмещенная электрическая машина | 1979 |
|
SU871283A1 |
| Трехфазная обмотка для электрической машины совмещенного типа | 1987 |
|
SU1495919A1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2002 |
|
RU2250340C2 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА РЕЛЬЕФА МЕСТНОСТИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2014 |
|
RU2571845C1 |
| ДВУХОБМОТОЧНЫЙ СТАТОР С m=3-ФАЗНЫМИ 2p=4·k- и 2р=6·k-ПОЛЮСНЫМИ ПЕТЛЕВЫМИ ОБМОТКАМИ В z=72·k ПАЗАХ | 2008 |
|
RU2355098C1 |
| ДВУХОБМОТОЧНЫЙ СТАТОР С m=3-ФАЗНЫМИ 2p=8·k- И 2р=10·k-ПОЛЮСНЫМИ ПЕТЛЕВЫМИ ОБМОТКАМИ В z=120·k ПАЗАХ | 2008 |
|
RU2362254C1 |
| ДВУХОБМОТОЧНЫЙ СТАТОР С m=3-ФАЗНЫМИ 2p=10- И 2р=12-ПОЛЮСНЫМИ ПЕТЛЕВЫМИ ОБМОТКАМИ В z=180 ПАЗАХ | 2008 |
|
RU2362251C1 |
| ДВУХОБМОТОЧНЫЙ СТАТОР С m=3-ФАЗНЫМИ 2p=14- и 2p=16-ПОЛЮСНЫМИ ПЕТЛЕВЫМИ ОБМОТКАМИ В z=168 ПАЗАХ | 2008 |
|
RU2355099C1 |
| ДВУХОБМОТОЧНЫЙ СТАТОР С m=3-ФАЗНЫМИ 2p=12- И 2p=14-ПОЛЮСНЫМИ ПЕТЛЕВЫМИ ОБМОТКАМИ В z=144 ПАЗАХ | 2008 |
|
RU2362257C1 |
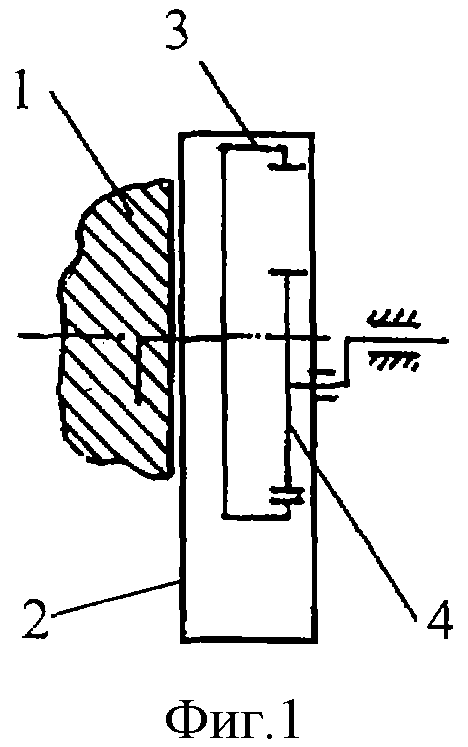

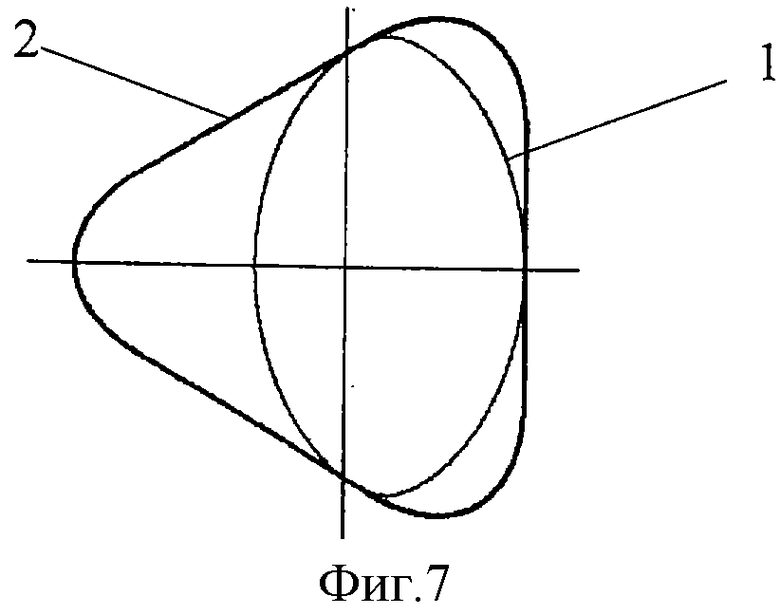

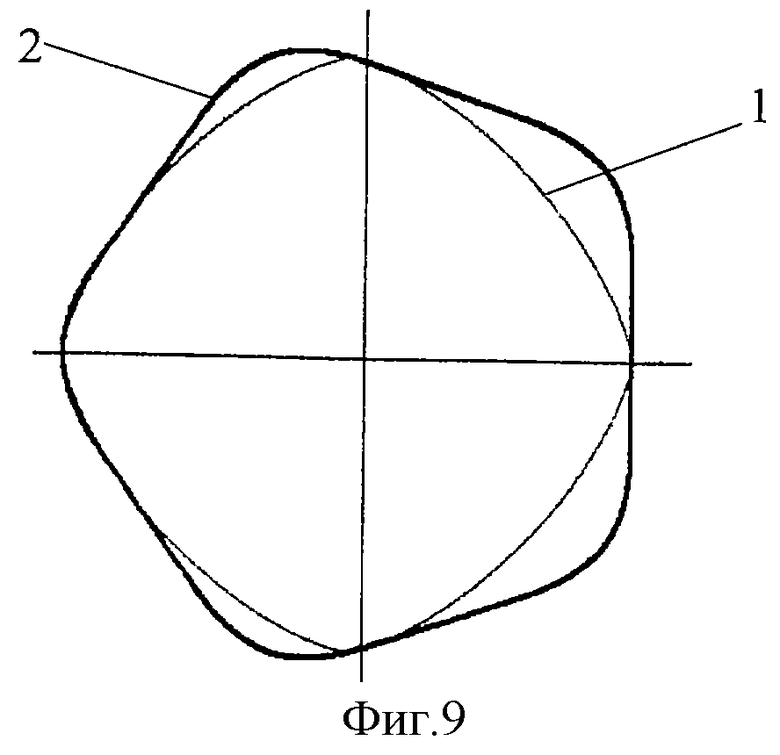
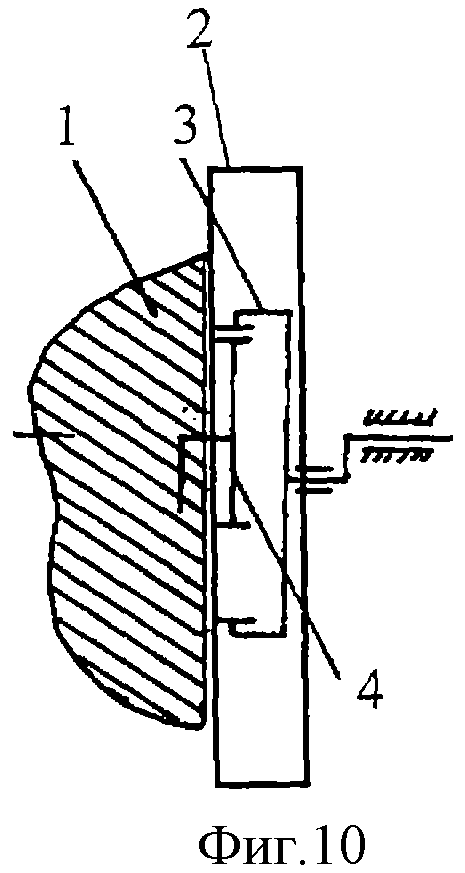

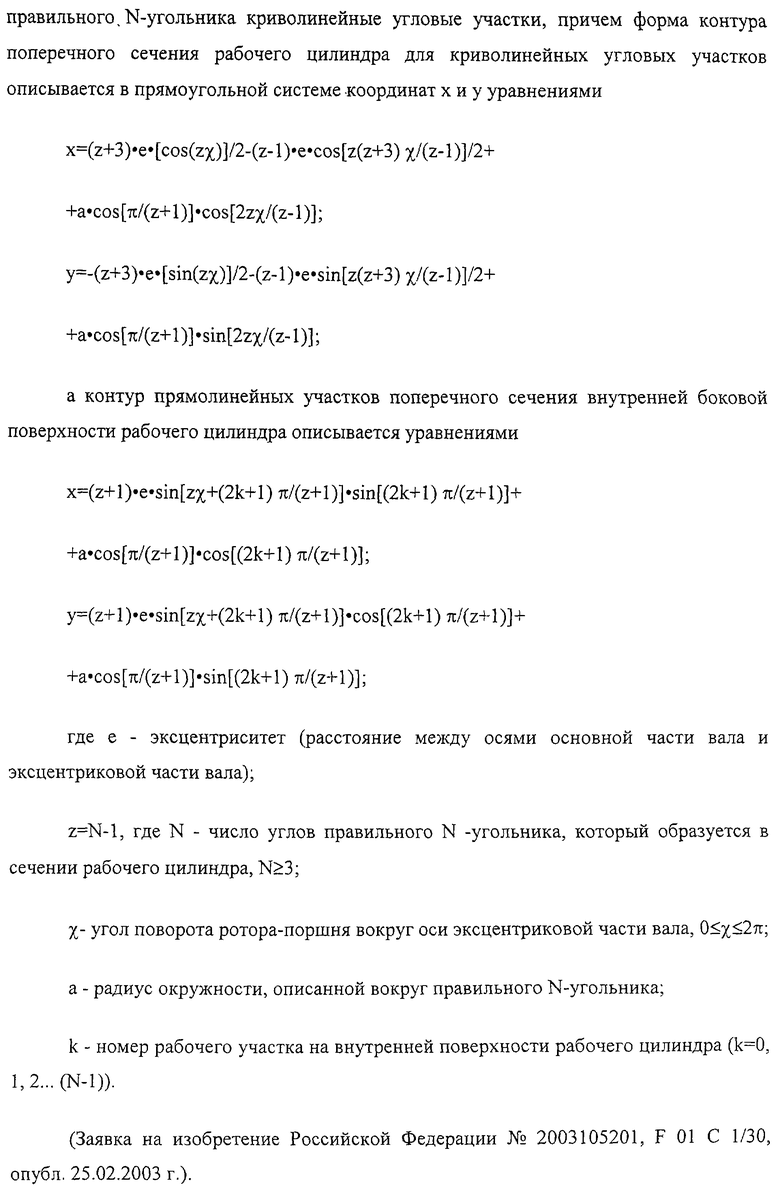
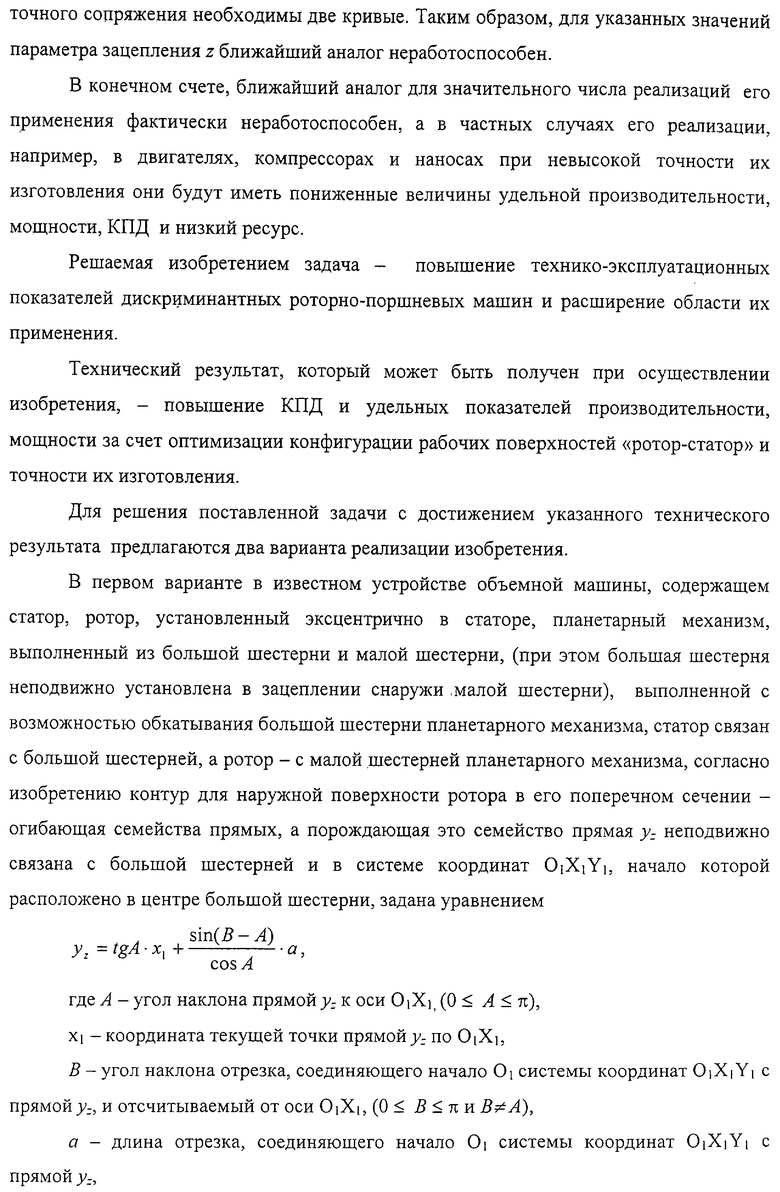
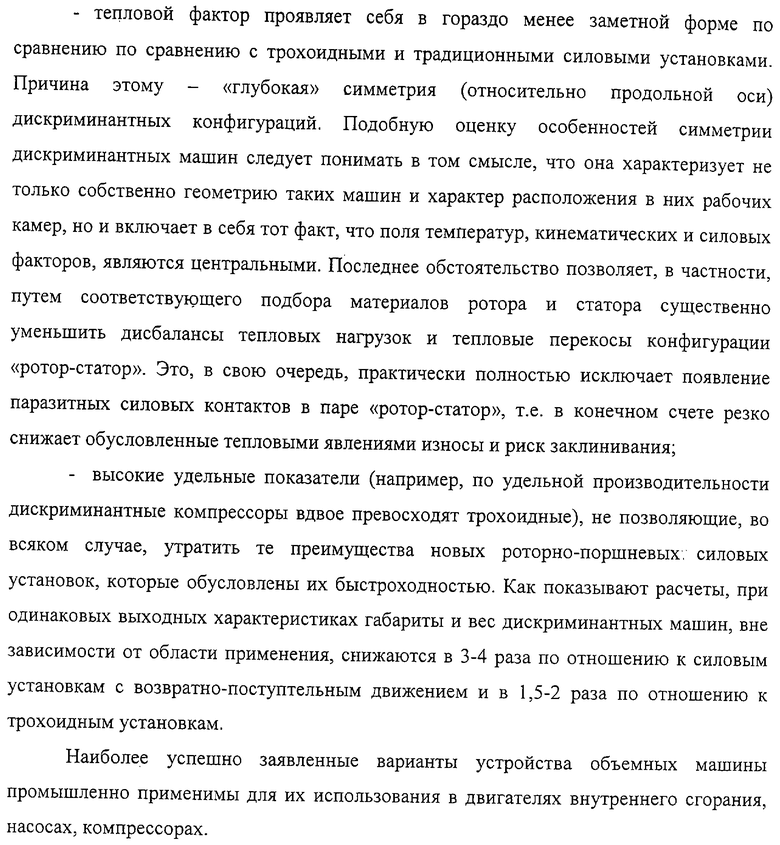
Изобретение относится к объемным роторно-поршневым машинам вытеснительного типа и может быть использовано в насосах, компрессорах, двигателях. В первом варианте устройство содержит статор, ротор, установленный эксцентрично в статоре. Планетарный механизм выполнен из большой шестерни и малой шестерни. Большая шестерня неподвижно установлена в зацеплении снаружи малой шестерни, выполненной с возможностью обкатывания большой шестерни планетарного механизма. Статор связан с большой шестерней, а ротор - с малой шестерней. Приведены уравнения, описывающие контуры ротора и статора. Во втором варианте устройство содержит статор и ротор. Малая шестерня установлена неподвижно, а большая шестерня выполнена с возможностью обкатывания малой шестерни планетарного механизма. Статор связан с малой шестерней, а ротор - с большой шестерней. Приведены уравнения, описывающие контуры ротора и статора. Повышаются КПД и удельные показатели производительности, мощности. 2 н.п. ф-лы, 18 ил.

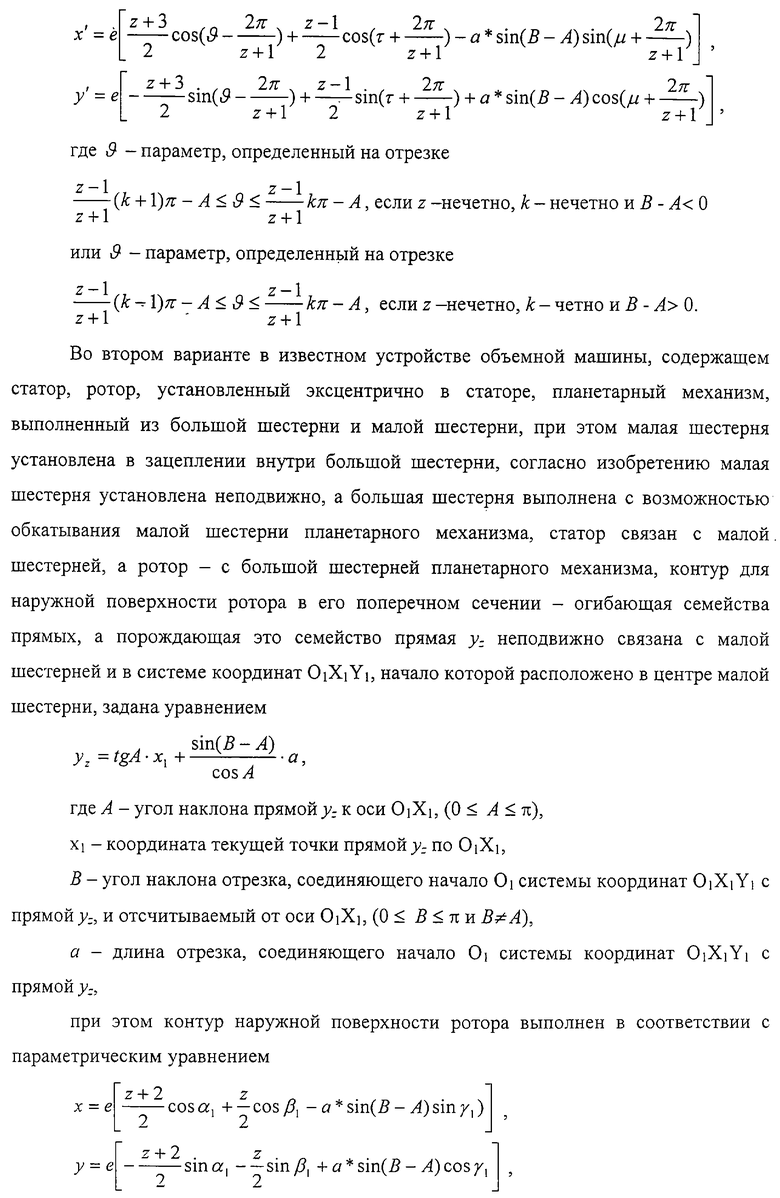
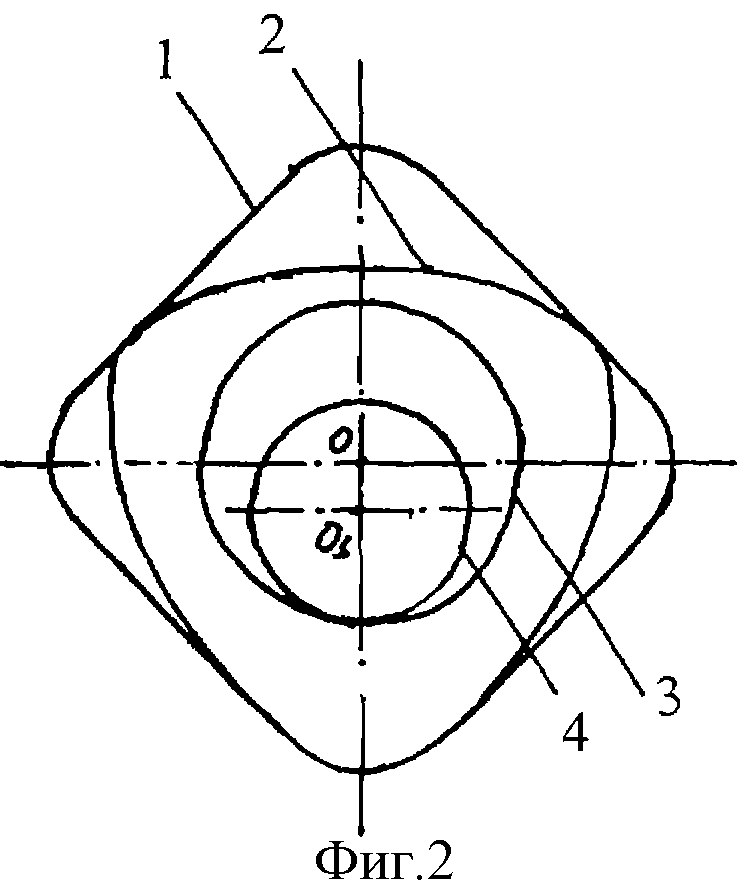
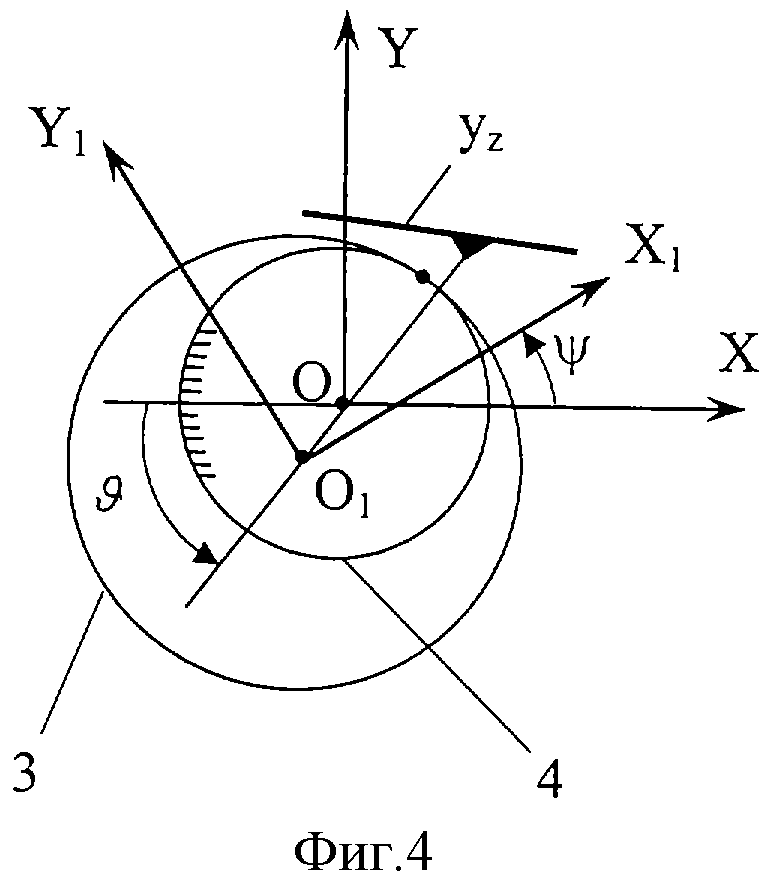
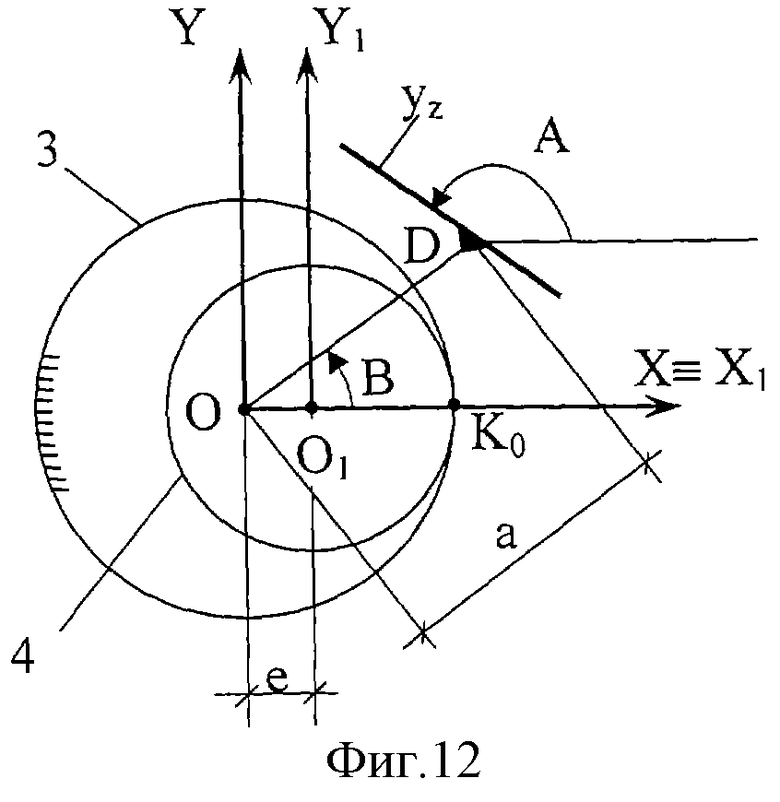
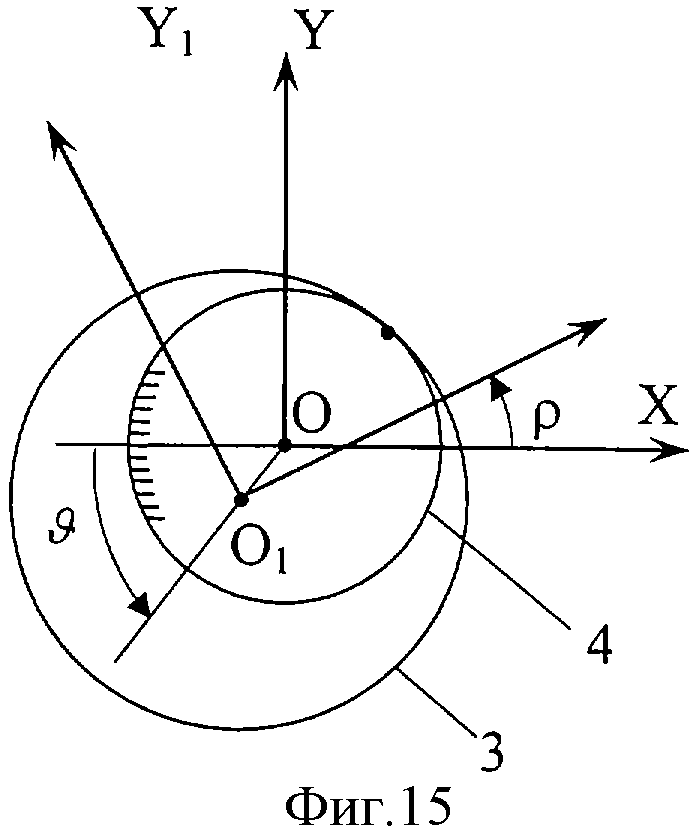
где А - угол наклона прямой yz к оси O1X1, (0≤A≤π);
x1 - координата текущей точки прямой yz по O1X1;
В - угол наклона отрезка, соединяющего начало O1 системы координат O1X1Y1 с прямой yz, и отсчитываемый от оси O1X1, (0≤В≤π и В≠А);
а - длина отрезка, соединяющего начало O1 системы координат O1X1Y1 с прямой yz,
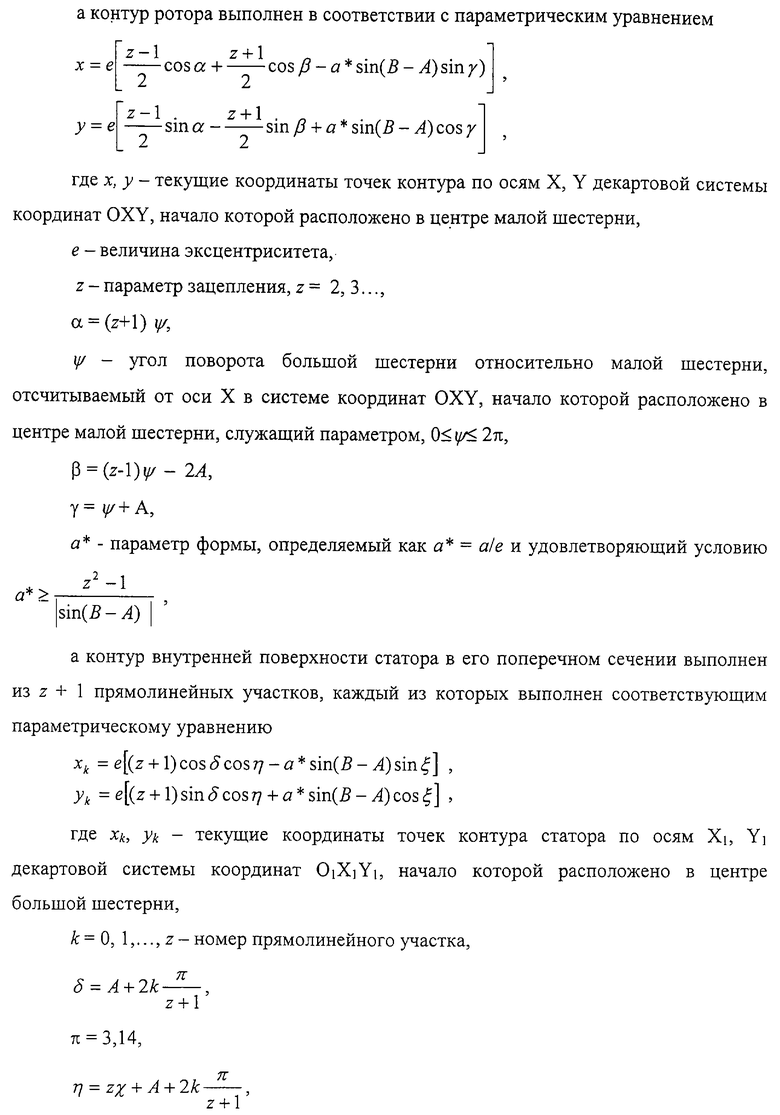
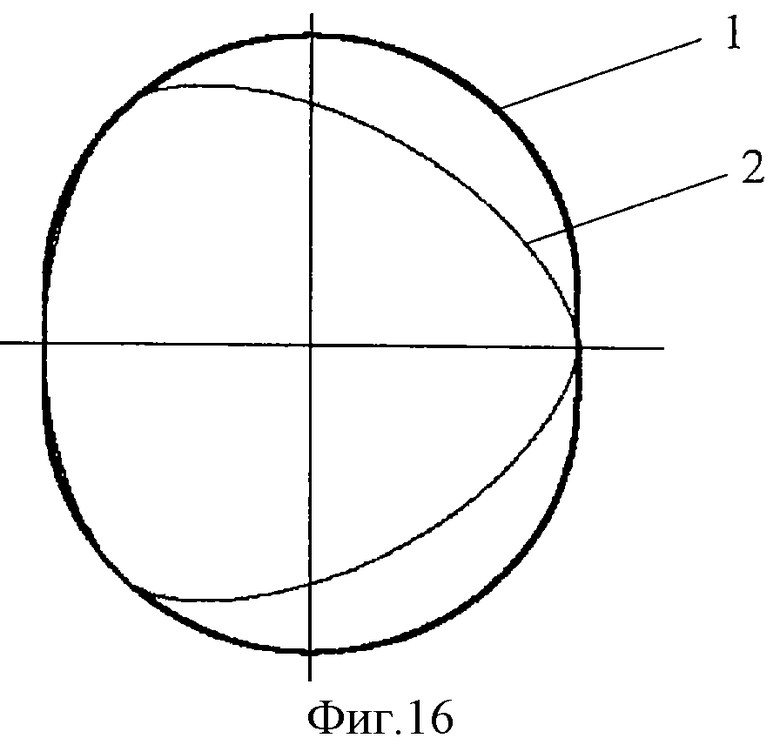
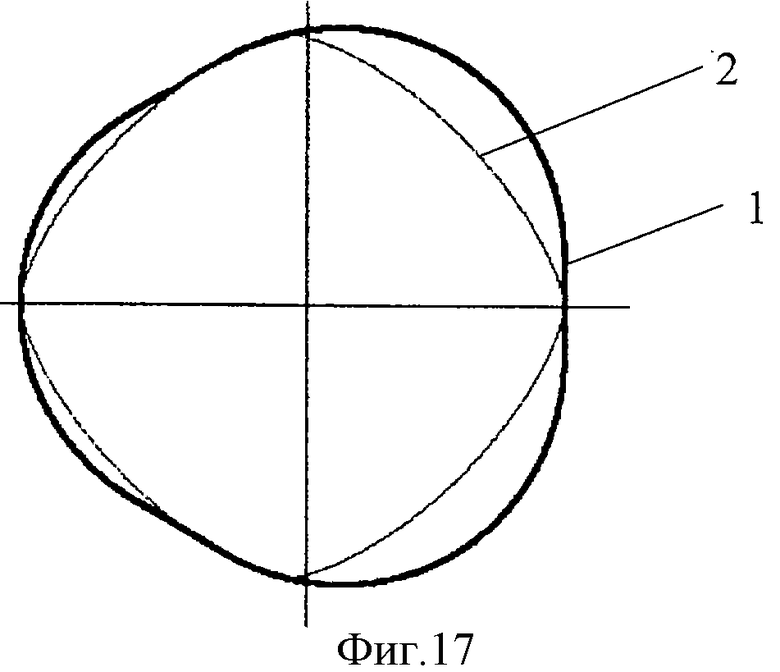
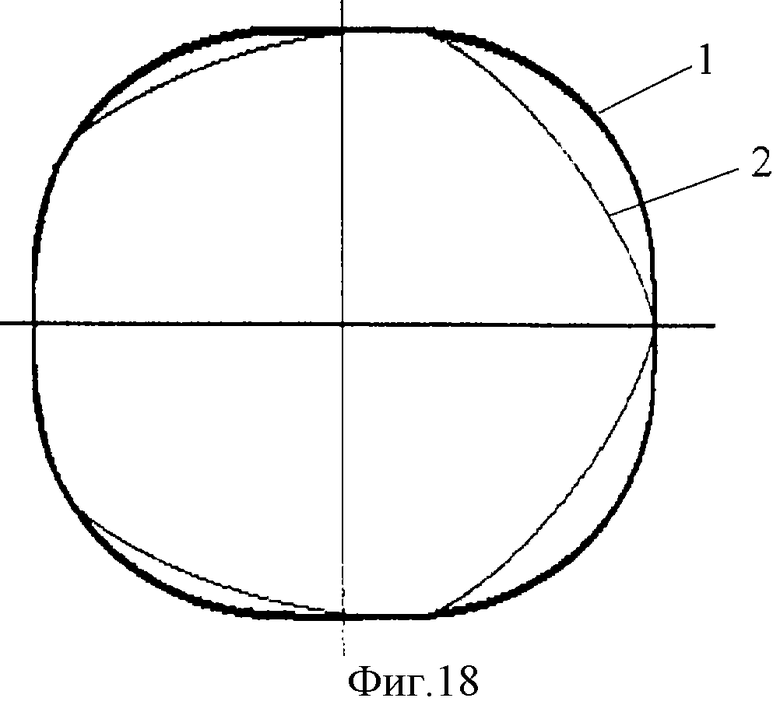
а контур выполнен в соответствии с параметрическим уравнением


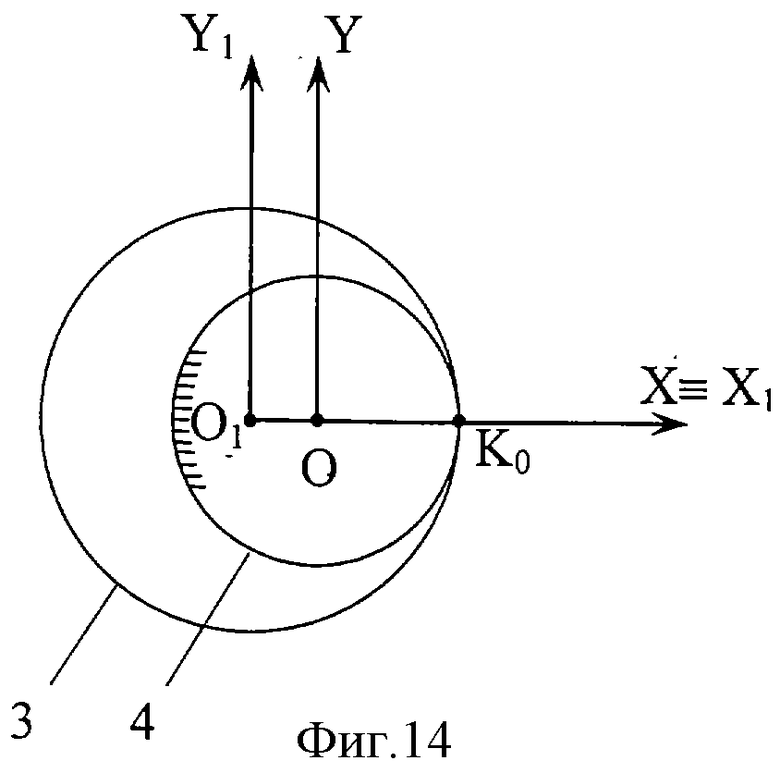
где х, у - текущие координаты точек контура по осям X, Y декартовой системы координат OXY, начало которой расположено в центре малой шестерни;
е - величина эксцентриситета;
z - параметр зацепления, z=2, 3...;
α=(z+1)ψ;
ψ - угол поворота большой шестерни относительно малой шестерни, отсчитываемый от оси Х в системе координат OXY, начало которой расположено в центре малой шестерни, служащий параметром, 0≤ψ≤2π;
β=(z-1)ψ-2A,
γ=ψ+A,
а* - параметр формы, определяемый как а*=а/е и удовлетворяющий условию  ,
,
а контур внутренней поверхности статора в его поперечном сечении выполнен из z+1 прямолинейных участков, каждый из которых выполнен соответствующим параметрическому уравнению
xk=e[(z+1)cosδcosη-a*sin(B-A)sinξ],
yk=e[(z+1)sinδcosη+a*sin(B-A)cosξ],
где xk, yk - текущие координаты точек контура статора по осям X1, Y1 декартовой системы координат O1X1Y1, начало которой расположено в центре большой шестерни;
k=0, 1,..., z - номер прямолинейного участка;
π=3,14,
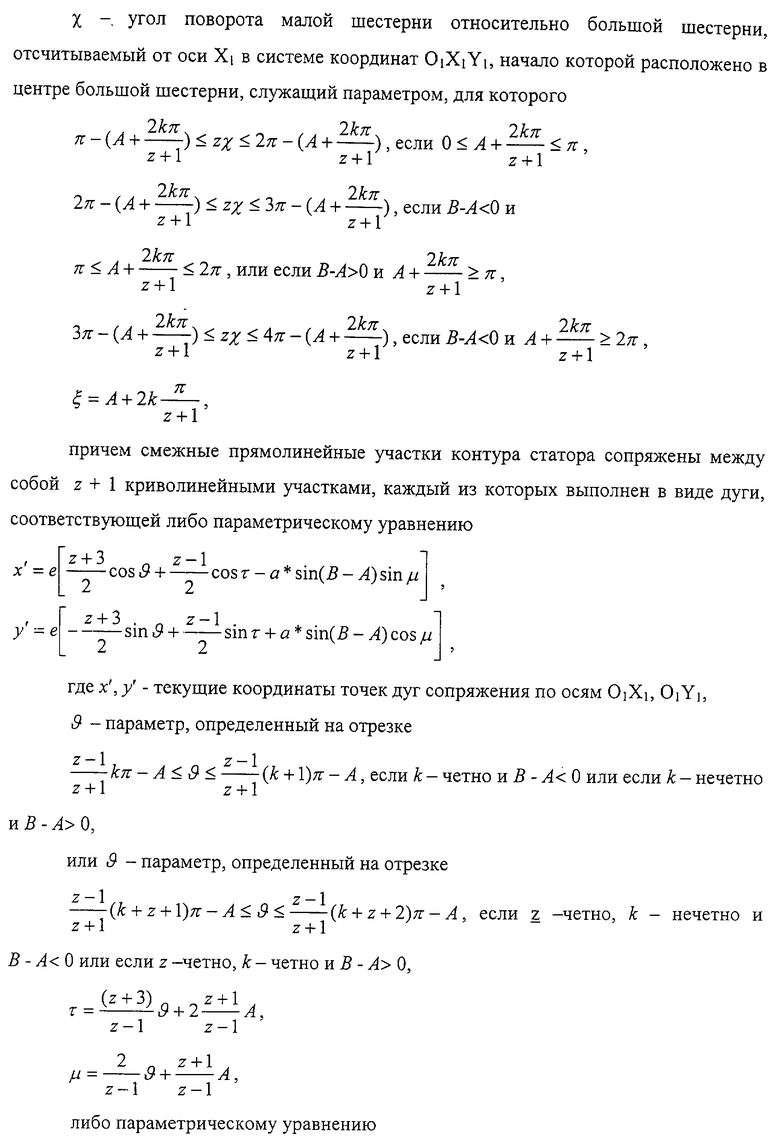
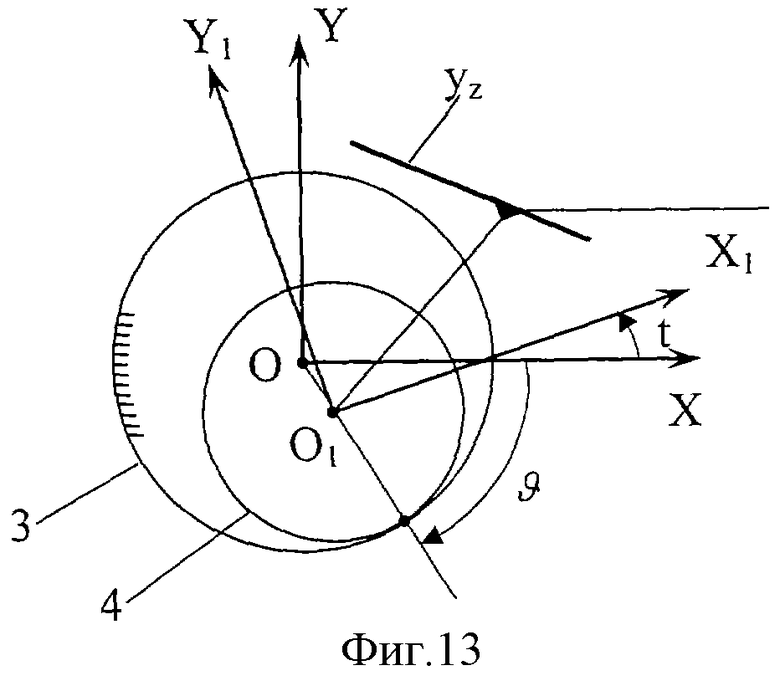
χ - угол поворота малой шестерни относительно большой шестерни, отсчитываемый от оси X1 в системе координат O1X1Y1, начало которой расположено в центре большой шестерни, служащий параметром, для которого
 , если
, если  ,
,
 , если B-A<0 и
, если B-A<0 и
 , или если В-А>0 и
, или если В-А>0 и  ,
,
 , если B-A<0 и
, если B-A<0 и  ,
,

 ,
,
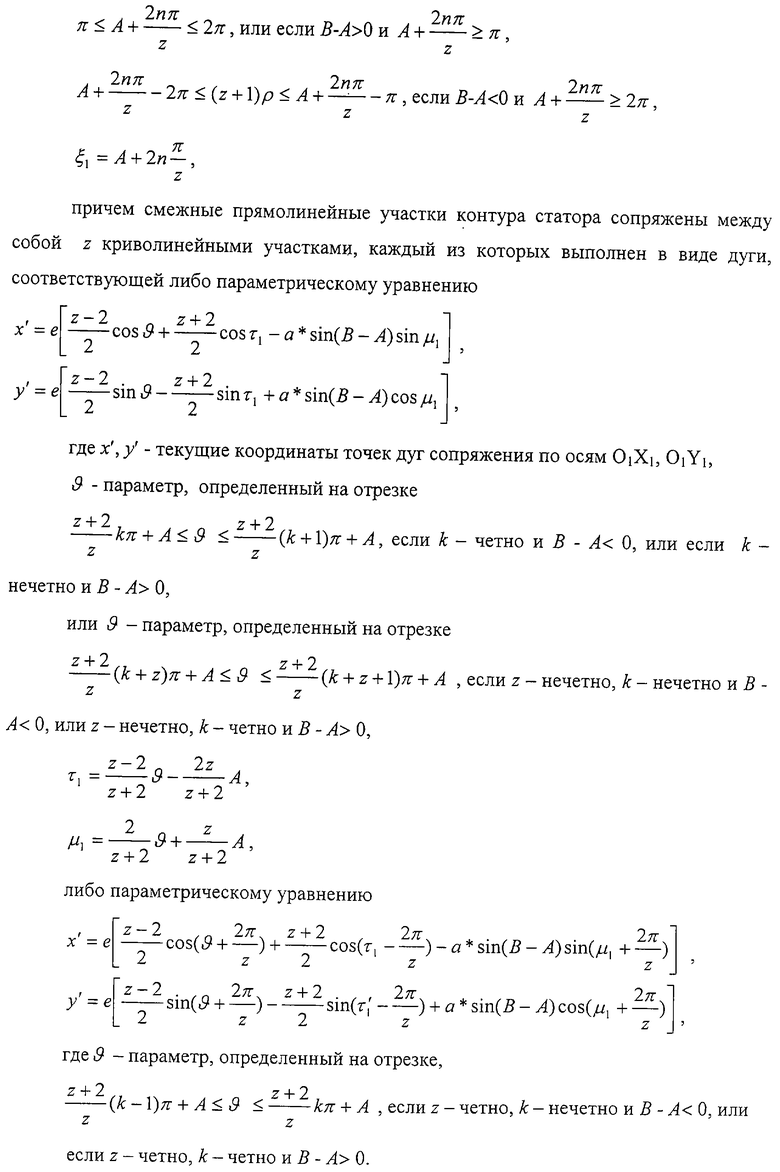
причем смежные прямолинейные участки контура статора сопряжены между собой z+1 криволинейными участками, каждый из которых выполнен в виде дуги, соответствующей либо параметрическому уравнению


где х', у' - текущие координаты точек дуг сопряжения по осям O1X1, O1Y1;
ϑ - параметр, определенный на отрезке
 , если k - четно и В-А<0 или если k - нечетно и В-А>0,
, если k - четно и В-А<0 или если k - нечетно и В-А>0,
или ϑ - параметр, определенный на отрезке
 , если z - четно, k - нечетно и B-A<0 или если z - четно, k - четно и В-А>0,
, если z - четно, k - нечетно и B-A<0 или если z - четно, k - четно и В-А>0,

либо параметрическому уравнению


где ϑ - параметр, определенный на отрезке
 , если z - нечетно, k - нечетно и В-А<0
, если z - нечетно, k - нечетно и В-А<0
или ϑ - параметр, определенный на отрезке
 , если z - нечетно, k - четно и В-А>0.
, если z - нечетно, k - четно и В-А>0.

где А - угол наклона прямой yz к оси O1X1, (0≤A≤π);
x1 - координата текущей точки прямой yz no O1X1;
В - угол наклона отрезка, соединяющего начало O1 системы координат O1X1Y1 с прямой yz, и отсчитываемый от оси O1X1, (0≤В≤π и В≠А);
а - длина отрезка, соединяющего начало O1 системы координат O1X1Y1 с прямой yz,
при этом контур наружной поверхности ротора выполнен в соответствии с параметрическим уравнением


где х, y - текущие координаты точек контура по осям X, Y декартовой системы координат OXY, начало которой расположено в центре большой шестерни,
е - величина эксцентриситета;
z - параметр зацепления, z=2, 3...;
а* - параметр формы, определяемый как а*=а/е и удовлетворяющий условию 
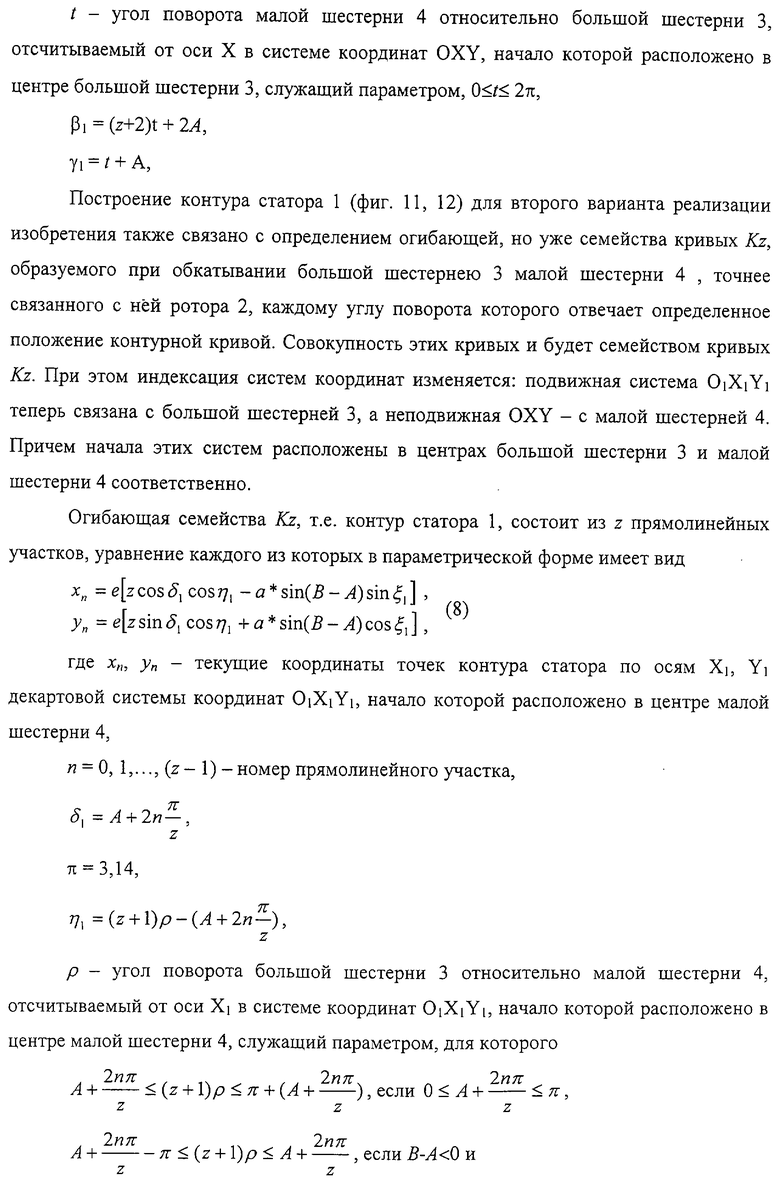
α1=zt;
t - угол поворота малой шестерни относительно большой шестерни, отсчитываемый от оси Х в системе координат OXY, начало которой расположено в центре большой шестерни, служащий параметром, 0≤t≤2π;
β1=(z+2)t+2A,
γ1=t+A,
а контур внутренней поверхности статора в его поперечном сечении выполнен из z прямолинейных участков, каждый из которых выполнен соответствующим параметрическому уравнению
xn=e[zcosδ1cosη1-a*sin(B-A)sinξ1],
yn=e[zsinδ1cosη1+a*sin(B-A)coξ1],
где xn, yn - текущие координаты точек контура статора по осям X1, Y1 декартовой системы координат O1X1Y1, начало которой расположено в центре малой шестерни;
n=0, 1,..., (z-1) - номер прямолинейного участка;
 ,
,
π=3,14,
 ,
,
ρ - угол поворота большой шестерни относительно малой шестерни, отсчитываемый от оси X1 в системе координат O1X1Y1, начало которой расположено в центре малой шестерни, служащий параметром, для которого
 , если
, если  ,
,
 , если B-A<0 и
, если B-A<0 и
 , или если В-А>0 и
, или если В-А>0 и  ,
,
 , если B-A<0 и
, если B-A<0 и  ,
,
 ,
,
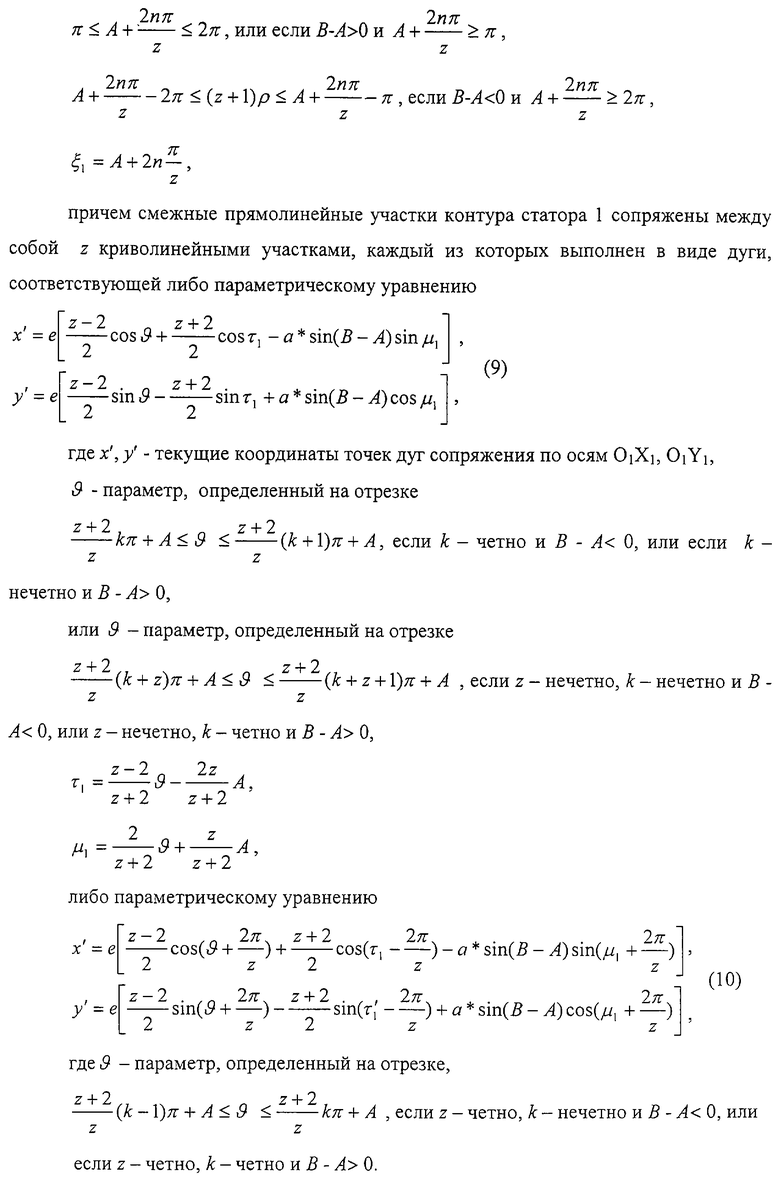
причем смежные прямолинейные участки контура статора сопряжены между собой z криволинейными участками, каждый из которых выполнен в виде дуги, соответствующей либо параметрическому уравнению


где х', у' - текущие координаты точек дуг сопряжения по осям O1X1, O1Y1;
ϑ - параметр, определенный на отрезке
 , если k - четно и В - А<0, или если k - нечетно и В-А>0,
, если k - четно и В - А<0, или если k - нечетно и В-А>0,
или ϑ - параметр, определенный на отрезке
 , если z - нечетно, k - нечетно и В - А<0, или z - нечетно, k - четно и В-А>0,
, если z - нечетно, k - нечетно и В - А<0, или z - нечетно, k - четно и В-А>0,

либо параметрическому уравнению


где ϑ - параметр, определенный на отрезке,
 , если z - четно, k - нечетно и В - А<0, или
, если z - четно, k - нечетно и В - А<0, или
если z - четно, k - четно и В-А>0.
| RU 2003105201 А, 20.10.2004 | |||
| СИЛОВАЯ УСТАНОВКА (ВАРИАНТЫ) | 1994 |
|
RU2056712C1 |
| ОБЪЕМНАЯ МАШИНА | 2001 |
|
RU2199668C1 |
| US 5380177 А, 10.01.1995 | |||
| US 4111617 А, 05.09.1978. | |||

