Изобретение касается усовершенствования преобразователей с вибрирующими элементами и может быть использовано в измерительной технике при измерении силы, давления, ускорения и т.п.
При изменении температуры окружающей среды изменяется температура датчика, что сказывается на изменении выходного сигнала, следовательно, появляется дополнительная погрешность измерения. Влияние на изменение собственной частоты колебаний резонатора оказывает как изменение геометрических размеров первичного преобразователя вследствие наличия у любого материала коэффициента линейного расширения, так и модуля упругости из-за присущего любому материалу температурного коэффициента модуля упругости. Изменение первого приводит к появлению аддитивной температурной погрешности, а изменение модуля упругости приводит к возникновению мультипликативной температурной погрешности.
Проведенное моделирование с использованием метода конечных элементов девиации собственной частоты колебаний резонатора от воздействия измеряемого параметра в зависимости от воздействия температуры для конструкции резонатора, представленного в патенте США №4813271 от 21.03.1989 г., показало следующие результаты:
- при температуре минус 60°С девиация собственной частоты колебаний Δf-60 в диапазоне измеряемого давления ΔР=3 атм составила 2355 Гц;
- при температуре +60°С девиация собственной частоты колебаний Δf+60 в диапазоне измеряемого давления ΔР=3 атм составила 2502 Гц.
Тогда приведенная дополнительная мультипликативная температурная погрешность составит 
или, переходя к мультипликативной температурной чувствительности 
Полученные количественные оценки дополнительной мультипликативной температурной погрешности и чувствительности не позволяют использовать подобные конструкции без применения специальных методов компенсации температурной погрешности, в особенности в высокоточных датчиках.
В настоящее время наибольшее распространение получил способ компенсации температурной погрешности, заключающийся во введении в конструкцию датчика термозависимого элемента (например, терморезистора), с которого снимается информация о температуре, с последующей ее обработкой и корректировкой информационного сигнала (например, патент США №4724707 от 20.08.1986 г.). Однако использование данного способа компенсации имеет ряд недостатков.
1. Вводится дополнительный канал измерения температуры.
2. Требуется математическая обработка сигнала с дополнительного канала и корректировка информационного сигнала с учетом дополнительного сигнала.
3. Отсутствует раздельная компенсация аддитивной и мультипликативной температурной погрешности и как результат не обеспечивается заданная точность измерения температуры для компенсации температурной погрешности.
Наибольшим недостатком данного метода является обеспечение заданной точности компенсации температурной погрешности. Так для высокоточных датчиков класса не более δ≤0,05% мультипликативная температурная чувствительность должна быть Skt≤0,5·10-5 1/°С, что на порядок меньше полученной количественной оценки суммарной температурной погрешности датчиков с монокристаллическим резонатором. Тогда для обеспечения заданной точности канал для измерения температуры должен иметь погрешность не более 0.06°С (для рассмотренного ранее случая изменения температуры в диапазоне 120°С), что при существующих методах измерения температуры является проблематичным.
По режиму работы преобразователи с частотным выходом классифицируются следующим образом. Работающие в режиме свободных колебаний, автоколебаний и вынужденных колебаний. Преобразователи с частотным выходом, работающие в режиме вынужденных колебаний, включают в себя резонатор, приемник сигналов для регистрации колебаний резонатора, схему настройки генератора, генератор гармонических колебаний и систему возбуждения (например, см. Боднер В.А. Приборы первичной информации: Учебник для авиационных вузов. - М.: Машиностроение, 1981). Схема работы таких преобразователей следующая: сигнал с генератора гармонических колебаний подается на систему возбуждения колебаний. Поскольку частота сигнала возбуждения близка к частоте собственных колебаний резонатора, то резонатор начинает колебаться на одной из гармоник, при этом амплитуда колебаний соответствует резонансной кривой этого резонатора. Максимальная амплитуда колебаний резонатора достигается при равенстве частоты сигнала возбуждения и собственной частоты колебаний резонатора. Колебания резонатора воспринимаются приемником сигналов, далее снятый сигнал преобразуется нормирующим усилителем. Сигнал с выхода нормирующего усилителя представляет собой гармонический сигнал требуемой амплитуды, частота которого соответствует частоте собственных колебаний резонатора. Кроме того, нормирующий усилитель можно рассматривать как часть схемы настройки генератора гармонических колебаний, с выхода нормирующего усилителя сигнал подается на генератор, предварительно преобразованный в сигнал постоянного напряжения, а частота генератора определяется величиной подаваемого сигнала. При воздействии внешних факторов (давление, сила, температура и пр.) изменяется частота собственных колебаний резонатора, соответственно изменяется величина сигнала обратной связи (управляющего сигнала), подаваемого на генератор гармонических колебаний, частота генератора изменяется пропорционально изменению величины управляющего сигнала. Поскольку частота генератора становится равной измененной частоте собственных колебаний резонатора, то колебания резонатора опять происходят с максимальной амплитудой в резонансе. Таким образом, режим генерации обусловлен подачей сигнала положительной обратной связи, включающей в себя схему настройки генератора и генератор гармонических колебаний, управляемый напряжением, с выхода резонатора после усиления на резонансный контур.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа компенсации мультипликативной температурной погрешности датчика с вибрирующим элементом с выходным сигналом в виде девиации частоты, который позволил бы повысить точность минимизации мультипликативной температурной погрешности в условиях стационарных температурных режимов.
Технический результат заключается в повышении точности минимизации мультипликативной температурной погрешности датчика с вибрирующим элементом при воздействии стационарных температурных режимов.
Указанный технический результат достигается тем, что в нормирующий усилитель с регулируемым коэффициентом усиления вводится термозависимое сопротивление, которое изменяет коэффициент усиления таким образом, что при изменении температуры амплитуда сигнала, подаваемого на детектор, который преобразует синусоидальный сигнал в постоянное напряжение, не изменяется. Следовательно, и управляющее напряжение с детектора, подаваемое на генератор гармонических колебаний, не изменяется при изменении температуры, частота генератора также остается постоянной. В результате этого девиация частоты генератора, следовательно, и девиация частоты выходного сигнала от измеряемого параметра при изменении температуры остается постоянной.
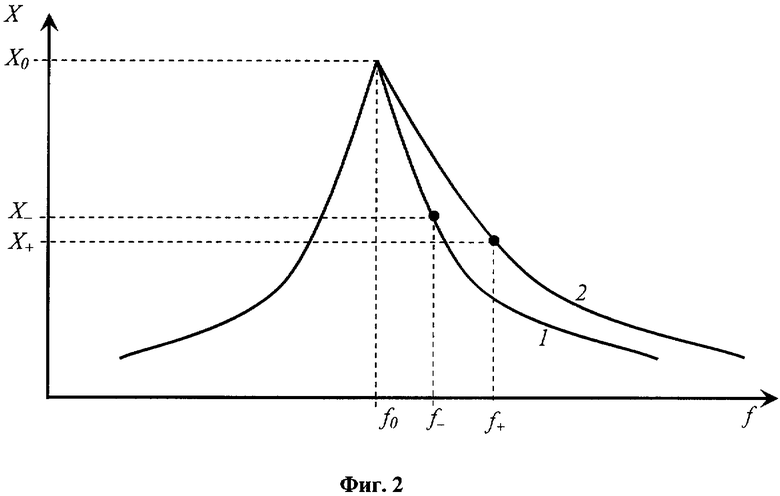
На фиг.1 приведена структурная схема преобразователя: 1 - генератор гармонических колебаний, управляемый напряжением, 2 - резонатор, 3 - нормирующий усилитель с регулируемым коэффициентом усиления, 4 - детектор, преобразующий синусоидальный сигнал в постоянное напряжение, 5 - термозависимое сопротивление, Т - внешний воздействующий фактор - температура, Р - измеряемый параметр, например давление. Выход преобразователя представляет собой синусоидальный сигнал, девиация частоты которого соответствует девиации частоты колебаний вибрирующего элемента 2 от измеряемого параметра Р.
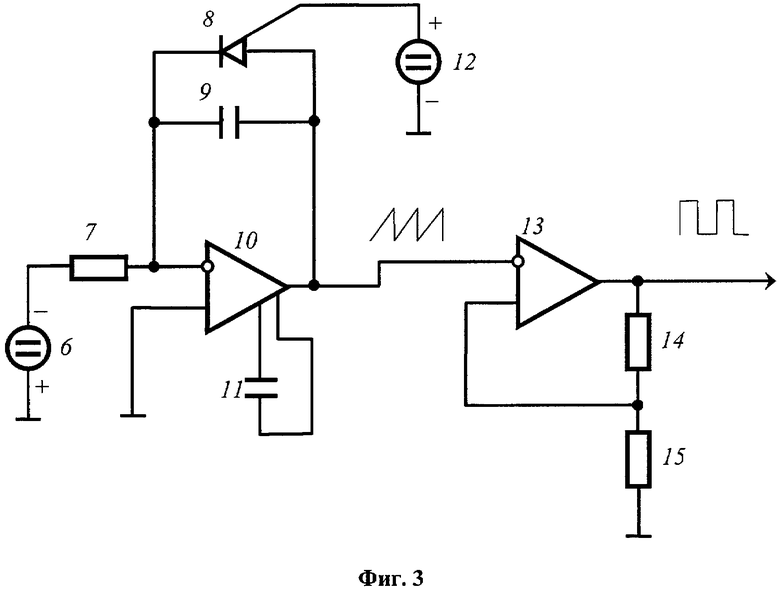
На фиг.2 приведена зависимость амплитуды колебаний вибрирующего элемента от частоты сигнала возбуждения (в рассматриваемом случае - частоты генератора гармонических колебаний). Частота f0 равна частоте собственных колебаний вибрирующего элемента, что соответствует резонансу. Предполагая, что правая ветвь резонансной кривой относительно частоты f0 является рабочей, кривая 1 соответствует минимальной рабочей температуре, а кривая 2 соответствует максимальной рабочей температуре. Девиация амплитуды колебаний вибрирующего элемента при минимальной рабочей температуре составляет Х- - Х0, что соответствует изменению частоты колебаний вибрирующего элемента от f0 до f-, для максимальной рабочей температуры девиация амплитуды колебаний вибрирующего элемента составляет X+-Х0, а изменение частоты колебаний составляет от f0 до f+. Резонансные кривые приведены без учета температурной аддитивной составляющей изменения амплитуды колебаний вибрирующего элемента от температуры. Вид резонансных кривых зависит от характеристик используемого материала, в частности коэффициента внутреннего трения (демпфирования).
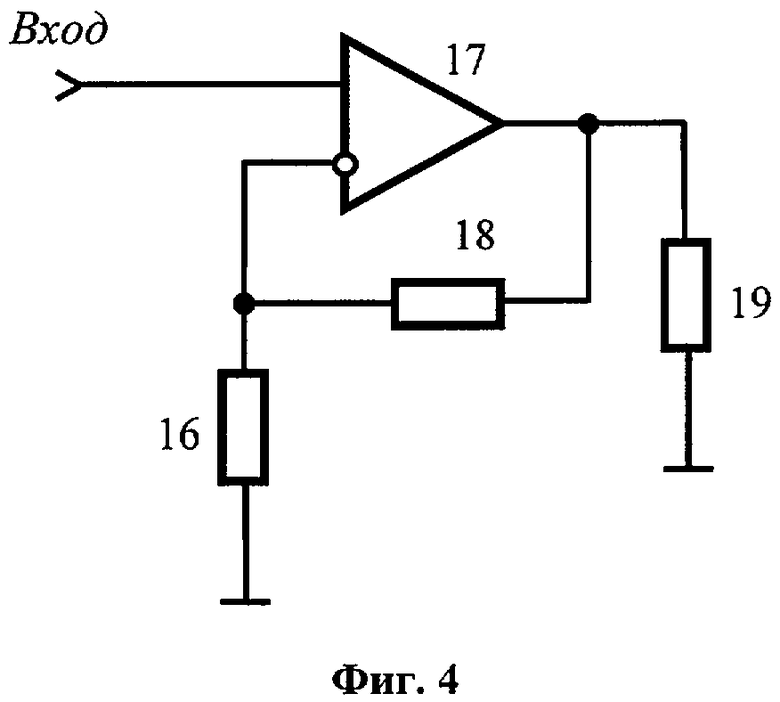
На фиг.3 представлен вариант генератора прямоугольных импульсов, управляемого напряжением, который реализован на двух операционных усилителях типа LM301: 6 - источник управляющего напряжения (в дальнейшем «E1»), 7 - сопротивление (в дальнейшем «R1Г»), 8 - тиристор (например, 2N6087), 9 - емкость (в дальнейшем «С1»), 10, 13 - операционный усилитель LM301, 11 - емкость, 12 - источник опорного напряжения (в дальнейшем «E2»), 14 - сопротивление величиной 100 кОм, 15 - сопротивление величиной 35 кОм.
На фиг.4 приведен пример нормирующего усилителя с регулируемым коэффициентом усиления: 16 - опорное сопротивление (в дальнейшем «R1»), 17 - операционный усилитель, 18 - сопротивление в обратной связи нормирующего усилителя (в дальнейшем «R2»), 19 - сопротивление нагрузки RH.
При максимальной температуре и отсутствии измеряемого параметра амплитуда колебаний Х0 вибрирующего элемента усиливается при помощи нормирующего усилителя и преобразуется в постоянное напряжение детектором такой величины, чтобы частота генератора f0 была равна частоте собственных колебаний вибрирующего элемента, т.е. колебания вибрирующего элемента происходят в резонансе. При увеличении измеряемого параметра (например, давления) вследствие несоответствия частоты генератора f0 частоте собственных колебаний вибрирующего элемента, которая увеличивается при увеличении измеряемого параметра и становится равной некоторой частоте f+ (для которой амплитуда колебаний вибрирующего элемента уменьшается до Х+ без учета влияния обратной связи), см. фиг.2, уменьшается и напряжение, подаваемого на вход управляемого напряжением генератора. Частота генератора в соответствии с изменением управляющим напряжением также изменится на величину, определяемой функциональной зависимостью частоты генератора от управляющего напряжения, и становится равной частоте собственных колебаний f+ вибрирующего элемента. Таким образом, поддерживаются колебания вибрирующего элемента в резонансе при любом значении измеряемого параметра и любом значении температуры. При минимальной рабочей температуре изменению величины измеряемого параметра от минимального до номинального соответствует изменение частоты собственных колебаний вибрирующего элемента от f0 до f-, а амплитуда колебаний уменьшается от Х0 до Х- (без учета обратной связи). Поскольку благодаря обратной связи колебания вибрирующего элемента поддерживаются в резонансе, то частота генератора также изменяется от f0 до f- при изменении величины измеряемого параметра от минимального до номинального.
При введении в нормирующий усилитель с регулируемым коэффициентом усиления термозависимого сопротивления колебания вибрирующего элемента происходят в резонансе при любом значении измеряемого параметра, но только при той температуре, при которой производилась настройка схемы поддержания колебаний вибрирующего элемента. Изменение температуры приводит к изменению величины термозависимого сопротивления, следовательно, и коэффициента усиления нормирующего усилителя. Это означает, что изменяется функциональная зависимость между изменением амплитуды колебаний вибрирующего элемента и требуемым изменением частоты генератора гармонических колебаний, поэтому колебания вибрирующего элемента происходят не в резонансе при изменении температуры. Амплитуда колебаний вибрирующего элемента в этом случае меньше, чем в случае, когда колебания вибрирующего элемента происходят в резонансе, но выходной сигнал является зависимостью частоты колебаний от измеряемого параметра, поэтому изменение амплитуды колебаний вибрирующего элемента не влияет на точность измерения. Измененная функциональная зависимость между изменением амплитуды колебаний вибрирующего элемента и требуемым изменением частоты генератора гармонических колебаний должна быть такой, чтобы девиация частоты выходного сигнала от измеряемого параметра оставалась постоянной при любом изменении температуры.
Пример генератора прямоугольных импульсов, управляемого напряжением, приведен на фиг.3, который реализован на двух операционных усилителях типа LM301. Функция преобразования этого генератора, дающая связь частоты генерации f с управляющим напряжением E1, имеет вид:
где Е2 - опорное напряжение, получаемое от основного источника питания генератора.
Пример усилителя с регулируемым коэффициентом усиления по напряжению, реализованный на операционном усилителе (например, К140УД8), приведен на фиг.4. Коэффициент усиления Кy такого усилителя равен:
Коэффициент усиления может регулироваться как сопротивлением R1, так и сопротивлением R2. Данный усилитель имеет очень высокое входное сопротивление, поэтому его влияние на регистрирующий колебания элемент будет минимально.
1. Рассмотрим случай, когда термозависимым сопротивлением выступает сопротивление R2 в обратной связи нормирующего усилителя. Допустим, что при настройке в резонанс генератора с вибрирующим элементом при максимальной рабочей температуре амплитуда колебаний вибрирующего элемента равна Х0, амплитуда входного напряжения на нормирующий усилитель равна UBX 0, начальный уровень выходного сигнала имеет амплитуду UВЫХ 0 и частоту f0. При воздействии измеряемого параметра величиной, равной номинальному значению, и при максимальной рабочей температуре входное напряжение на нормирующий усилитель изменяется до UВХ 2, а выходной сигнал изменяется до значения UВЫХ 2 и частота выходного сигнала равна f+. Примем, что при воздействии измеряемого параметра величиной, равной номинальному значению, изменяется входное напряжение на нормирующий усилитель до значения UВХ 1, а выходной сигнал изменяется до значения UВЫХ 1 с частотой f-.
Обозначим девиацию выходного сигнала при максимальной рабочей температуре ΔU+=UВЫХ 2-UВЫХ 0, девиацию выходного сигнала при минимальной рабочей температуре ΔU-=UВЫХ 1-UВЫХ 0, девиацию входного сигнала на нормирующий усилитель при максимальной рабочей температуре ΔUВХ+=UВХ 2-UВХ 0, девиацию входного сигнала на нормирующий усилитель при минимальной рабочей температуре ΔUBX-=UВХ 1-UВХ 0, девиацию частоты выходного сигнала при максимальной рабочей температуре Δf+=f+-f0, девиацию частоты выходного сигнала при минимальной рабочей температуре Δf-=f- - f0. Сравнивая девиации частоты выходного сигнала Δf+ и Δf-, определяют знак изменения коэффициента усиления нормирующего усилителя Kу, по которому определяется требуемый знак температурного коэффициента сопротивления (ТКС) термозависимого сопротивления Rα. Например, если требуемая девиация частоты выходного сигнала при любом изменении температуры равна Δf+, то:
- если Δf+>Δf-, то коэффициент усиления нормирующего усилителя Кy должен увеличиваться с уменьшением температуры, что приводит в результате к увеличению девиации управляющего напряжения Е1 (1) и увеличению девиации частоты генератора; в соответствии с (2) коэффициент усиления нормирующего усилителя может быть увеличен при уменьшении температуры путем уменьшения R1, что соответствует положительному ТКС термозависимого сопротивления R1, или путем увеличения R2, что соответствует отрицательному ТКС термозависимого сопротивления R2;
- если Δf->Δf+, то коэффициент усиления нормирующего усилителя Кy должен уменьшаться с уменьшением температуры, что в результате приводит к уменьшению значения управляющего напряжения E1 (1) и уменьшению девиации частоты генератора; в соответствии с (2) коэффициент усиления нормирующего усилителя может быть уменьшен при уменьшении температуры путем увеличения R1, что соответствует отрицательному ТКС термозависимого сопротивления R1, или путем уменьшения R2, что соответствует положительному ТКС термозависимого сопротивления R2.
Аналогично выбирается ТКС термозависимого сопротивления Rα для случая, когда требуемая девиация частоты выходного сигнала соответствует величине Δf- при любом изменении температуры.
Начальная частота генератора равна:

где Е10 - начальный уровень управляющего напряжения при отсутствии измеряемого параметра.
Частота генератора при номинальном значении измеряемого параметра и максимальной рабочей температуре равна:
где E1+ - величина управляющего напряжения при номинальном значении измеряемого параметра и максимальной рабочей температуре.
Частота генератора при номинальном значении измеряемого параметра и минимальной рабочей температуре равна:
где E1- - величина управляющего напряжения при номинальном значении измеряемого параметра и минимальной рабочей температуре.
Тогда девиация частоты выходного сигнала от измеряемого параметра при максимальной рабочей температуре равна:

Девиация частоты выходного сигнала от измеряемого параметра при минимальной рабочей температуре равна:

Обозначим девиацию управляющего напряжения E1 от измеряемого параметра при максимальной температуре:

а девиацию управляющего напряжения E1 от измеряемого параметра при минимальной температуре:

Предполагая единичный коэффициент преобразования детектора, т.е. величина выходного постоянного напряжения равна амплитуде входного синусоидального напряжения, с учетом коэффициента усиления нормирующего усилителя Ky, можно записать следующее:


где Кy - значение коэффициента усиления нормирующего усилителя при максимальной рабочей температуре;
Kyt - значение коэффициента усиления нормирующего усилителя при минимальной рабочей температуре.
Условие компенсации мультипликативной температурной компенсации заключается в том, что девиация частоты выходного сигнала от измеряемого параметра остается постоянной при любом значении воздействующей температуры, т.е. Δf+=Δf- или ΔE+=ΔE- в соответствии с выражениями (6)-(9). Тогда приравнивая выражения (10) и (11), получаем следующее выражение:

Для получения требуемой начальной величины сопротивления R2 и изменения сопротивления от температуры термозависимое сопротивление R2 включает в себя последовательно соединенные термонезависимое сопротивление R2H и термозависимое сопротивление Rα, величина которого изменяется от температуры по зависимости Rα=R0(1+α·ΔT), где R0 - начальная величина термозависимого сопротивления, соответствующее нормальной температуре, α - ТКС Rα, ΔT - диапазон изменения температуры:

Тогда подставляя выражение (2) в выражение (12), заменяя R2 в соответствии с (13), вводя обозначения Rα-=R0(1+α·ΔT2) и Rα+=R0(1+α·ΔT1), которые соответствуют величинам термозависимого сопротивления Rα при минимальной и максимальной рабочих температурах, изменение температуры ΔT1 соответствует диапазону изменения температуры от нормальной до максимальной рабочей, а ΔТ2 - диапазон изменения температуры от нормальной до минимальной рабочей, получаем:

Решая последнее выражение относительно Rα, получаем требуемую величину термозависимого сопротивления Rα при нормальной температуре:

В соответствии с выражениями (10) и (11) девиация входного напряжения на нормирующий усилитель ΔUBX пропорциональна девиации управляющего напряжения ΔЕ, а девиация управляющего напряжения ΔЕ пропорциональна девиации частоты генератора Δf соответствии с выражениями (6)-(9), то выражение (15) с учетом вышеприведенных зависимостей преобразуется к следующему виду:

Колебания вибрирующего элемента происходят с частотой сигнала возбуждения на выходе генератора, поэтому девиация частоты выходного сигнала Δf в выражении (16) соответствует девиации частоты выходного сигнала. Поэтому при определении величины термозависимого сопротивления Rα по зависимости (16) используется девиация частоты выходного сигнала.
Решая систему уравнений (16) и (13) относительно неизвестных Rα и R2H (поскольку настройка производится при максимальной температуре, то в выражении (13) Rα соответствует Rα+=R0(1+α·ΔT1)), получаем требуемые величины термонезависимого сопротивления R2H и термозависимого сопротивления Rα, величина которого соответствует нормальной температуре. ТКС α термозависимого сопротивления Rα берется равным ТКС термозависимого сопротивления, полученному при изготовлении в конструкции датчика термозависимого сопротивления Rα.
Например, по результатам моделирования с использованием метода конечных элементов девиация частоты выходного сигнала при максимальной рабочей температуре Δf+ составила 2502 Гц, при минимальной рабочей температуре девиация частоты выходного сигнала Δf- составила 2355 Гц. Коэффициент усиления нормирующего усилителя Кy равен 50 при предварительной настройке, величина сопротивления R2=4,9 кОм, a R1=0,1 кОм. Поскольку коэффициент усиления нормирующего усилителя КУ должен увеличиваться с уменьшением температуры пропорционально уменьшению девиации частоты выходного сигнала, то соответственно и величина термозависимого сопротивления R2 должна также увеличиваться при уменьшении температуры, поэтому термозависимое сопротивление R2 должно иметь отрицательный ТКС α. Для полупроводниковых материалов может быть получен отрицательный температурный коэффициент сопротивления, абсолютная величина которого лежит в пределах 0,003÷0,2 1/К.
Выбирая в качестве материала для термозависимого сопротивления Rα полупроводниковый материал с температурным коэффициентом сопротивления α, равным минус 0,003 1/°С, принимая диапазон изменения рабочих температур от +60°С (максимальная рабочая температура) до минус 60°С (минимальная рабочая температура), решая систему уравнений (16) и (13), получаем величину термозависимого сопротивления Rα=0,867 кОм для нормальной температуры (0.763 кОм при максимальной рабочей температуре), а термонезависимое сопротивление R2H должно быть равно 4,137 кОм. При выполнении этих условий коэффициент усиления нормирующего усилителя КУ изменяется в соответствии с выражением (2) от 
что соответствует максимальной рабочей температуре, до 
что соответствует минимальной рабочей температуре. Увеличение коэффициента усиления нормирующего усилителя при уменьшении температуры КУt/КУ=53,1/50=1,062, тогда увеличение девиации частоты выходного сигнала при минимальной температуре Δf-·1,062=2355 Гц · 1,062=2501 Гц. Таким образом, при выполнении указанных условий обеспечивается постоянство девиации частоты выходного сигнала от измеряемого параметра при изменении температуры.
2. Рассмотрим случай, когда термозависимым сопротивлением выступает сопротивление R1.
Для получения требуемой начальной величины сопротивления R1 и изменения сопротивления от температуры термозависимое сопротивление R1 включает в себя последовательно соединенные термонезависимое сопротивление R1H и термозависимое сопротивление Rα, величина которого изменяется от температуры по зависимости Rα=R0(1+α·ΔT), где R0 - начальная величина термозависимого сопротивления, соответствующее нормальной температуре, α - ТКС Rα, ΔT - диапазон изменения температуры:

Подставляя выражение (2) в выражение (12), заменяя R2 в соответствии с (17), вводя обозначения Rα-=R0(1+α·ΔT2) и Rα+=R0(1+α·ΔT1), которые соответствуют величинам термозависимого сопротивления Rα при минимальной и максимальной рабочих температурах, изменение температуры ΔT1 соответствует диапазону изменения температуры от нормальной до максимальной рабочей, а ΔТ2 - диапазон изменения температуры от нормальной до минимальной рабочей, получаем:

Решая последнее выражение относительно Rα, получаем следующее квадратное уравнение:

где a=(1+α·ΔT1)·(1+α·ΔT2)·(ΔUВХ+-ΔUВХ-);
b=R1H·(ΔUВХ+-ΔUВХ-)·(2+α·(ΔT2+ΔT1))+R2·((1+α·ΔT2)·ΔUВХ+-(1+αΔT1)·ΔUВХ-);
с=R1H·(ΔU+-ΔU-)·(R1H+R2).
Или, аналогично выводу выражения (16), получаем значения коэффициентов квадратного уравнения (19), выраженные через девиацию частоты выходного сигнала:
a=(1+α·ΔT1)·(1+α·ΔT2)·(Δf+-Δf-);
b=R1H·(Δf+-Δf-)·(2+α·(ΔT2+ΔT1))+R2·((1+α·ΔT2)·Δf+-(1+α·ΔT1)·Δf-);
с=R1H·(Δf+-Δf-)·(R1H+R2).
Решением уравнения (19) является:

Решая систему уравнений (17) и (20) относительно неизвестных Rα и R1H (поскольку настройка производится при максимальной температуре, то в выражении (17) Rα соответствует Rα+=R0(1+α·ΔT1)), получаем требуемые величины термонезависимого сопротивления R1H и термозависимого сопротивления Rα, величина которого соответствует нормальной температуре. ТКС α термозависимого сопротивления Rα берется равным ТКС термозависимого сопротивления, полученному при изготовлении в конструкции датчика термозависимого сопротивления Rα.
Например, как и в рассматриваемом ранее случае, девиация частоты выходного сигнала при максимальной рабочей температуре Δf+ составила 2502 Гц, при минимальной рабочей температуре девиация частоты выходного сигнала Δf- составила 2355 Гц. Коэффициент усиления нормирующего усилителя КУ равен 50 при предварительной настройке, сопротивление R2=4,9 кОм, a R1=0,1 кОм. Поскольку коэффициент усиления нормирующего усилителя КУ должен увеличиваться с уменьшением температуры, то и величина термозависимого сопротивления R1 должна уменьшаться при уменьшении температуры, поэтому термозависимое сопротивление R1 должно иметь положительный ТКС α.
Для нихрома Х20Н80, используемого при формировании напыляемых сопротивлений, ТКС не превышает 1·10-3 1/°С, для сплава Х20Н75Ю ТКС не превышает 5·10-4 1/°С, а для сплава на основе силицидов П65ХС ТКС не превышает 1·10-4 1/°С.
Выбирая в качестве материала для термозависимого сопротивления Rα сплав Х20Н80 с ТКС α=1·10-3 1/°С, принимая диапазон изменения рабочих температур от +60°С (максимальная рабочая температура) до минус 60°С (минимальная рабочая температура), решая систему уравнений (17) и (20), получаем величину термозависимого сопротивления Rα=0,0499 кОм для нормальной температуры (0,0519 кОм для максимальной рабочей температуры), а термонезависимое сопротивление R1H=0,0481 кОм. При выполнении этих условий коэффициент усиления нормирующего усилителя КУ изменяется в соответствии с выражением (1) от

что соответствует максимальной рабочей температуре, до

что соответствует минимальной рабочей температуре. Увеличение коэффициента усиления нормирующего усилителя при уменьшении температуры KУt/КУ=53,1/50=1,062, тогда увеличение девиации частоты выходного сигнала при минимальной температуре Δf-·1,062=2355 Гц · 1,062=2501 Гц. Таким образом, при последовательном включении термозависимого сопротивления Rα и термонезависимого сопротивления R1Н в цепь нормирующего усилителя обеспечивается постоянство девиации амплитуды выходного сигнала от измеряемого параметра при изменении температуры путем изменения коэффициента усиления нормирующего усилителя.
Изобретение может быть использовано в измерительной технике при измерении силы, давления, ускорения и т.п. Технический результат заключается в повышении точности. Способ заключается в изменении коэффициента усиления нормирующего усилителя путем включения в обратную связь термозависимого сопротивления. Производят предварительную настройку преобразователя при положительной температуре и определяют величину сопротивления обратной связи нормирующего усилителя R2. Определяют начальную частоту выходного сигнала и частоту выходного сигнала при крайних значениях рабочего температурного диапазона, для каждого значения температуры рассчитывают девиацию частоты выходного сигнала от номинального значения измеряемого параметра. Для датчика ТКС термозависимого сопротивления находят величины термозависимого сопротивления Rα и термонезависимого сопротивления R2Н. Устанавливают термозависимое сопротивление расчетной величины Rα в обратную связь нормирующего усилителя последовательно с термонезависимым сопротивлением R2H. Аналогично выполняют способ, где определяют величину опорного сопротивления R1. Находят величины термозависимого сопротивления Rα и термонезависимого сопротивления R1H. Устанавливают термозависимое сопротивление расчетной величины Rα последовательно с термонезависимым сопротивлением R1H. 2 н.п. ф-лы, 4 ил.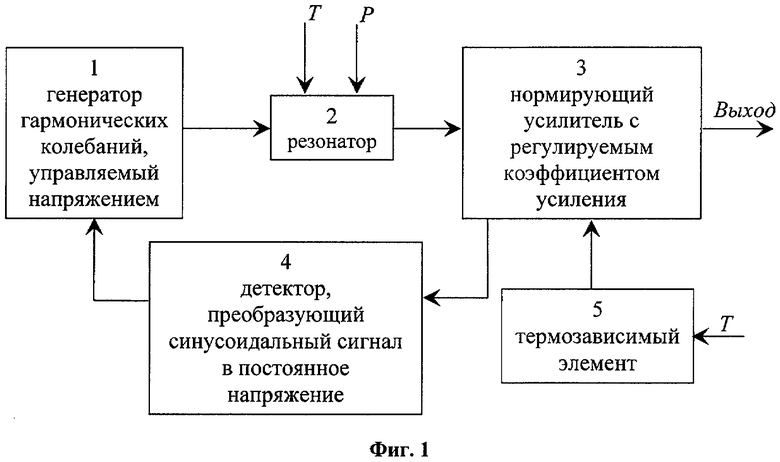
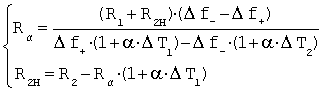
где R1 - опорное сопротивление;
Δf- - девиация частоты выходного сигнала при минимальной рабочей температуре;
Δf+ - девиация частоты выходного сигнала при максимальной рабочей температуре;
α - ТКС термозависимого сопротивления;
ΔT1 - диапазон изменения температуры от нормальной до максимальной рабочей;
ΔТ2 - диапазон изменения температуры от нормальной до минимальной рабочей,
устанавливают термозависимое сопротивление расчетной величины Rα в обратную связь нормирующего усилителя последовательно с термонезависимым сопротивлением R2H.
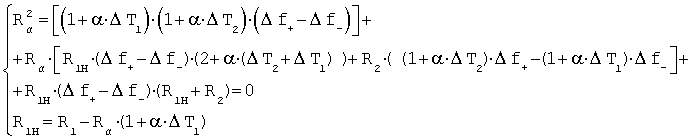
где R2 - сопротивление в обратной связи нормирующего усилителя;
Δf- - девиация частоты выходного сигнала при минимальной рабочей температуре;
Δf+ - девиация частоты выходного сигнала при максимальной рабочей температуре;
α - ТКС термозависимого сопротивления;
ΔT1 - диапазон изменения температуры от нормальной до максимальной рабочей;
ΔТ2 - диапазон изменения температуры от нормальной до минимальной рабочей,
устанавливают термозависимое сопротивление расчетной величины Rα последовательно с термонезависимым сопротивлением R1H.
| US 4724707, 16.02.1988 | |||
| Способ балансировки и температурной компенсации мостовых схем тонкопленочных тензорезисторных датчиков | 1983 |
|
SU1174738A1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ИНДУКТИВНОГО ПЕРВИЧНОГО ПРЕОБРАЗОВАТЕЛЯ | 2001 |
|
RU2215985C2 |
| Способ измерения силы с компенсацией температурной погрешности | 1989 |
|
SU1622781A1 |
| WO 2005107057, 10.11.2005. | |||

