Изобретение касается усовершенствования преобразователей с вибрирующими элементами и может быть использовано в измерительной технике при измерении силы, давления, ускорения и т.п.
При изменении температуры окружающей среды изменяется температура датчика, что сказывается на изменении выходного сигнала, следовательно, появляется дополнительная погрешность измерения. Влияние на изменение собственной частоты колебаний вибрирующего элемента оказывает как изменение геометрических размеров первичного преобразователя вследствие наличия у любого материала коэффициента линейного расширения, так и модуля упругости из-за присущего любому материалу температурного коэффициента модуля упругости. Изменение первого приводит к появлению аддитивной температурной погрешности, а изменение модуля упругости приводит к возникновению мультипликативной температурной погрешности.
Проведенное моделирование с использованием метода конечных элементов начальной частоты собственных колебаний и девиации частоты собственных колебаний вибрирующего элемента от воздействия измеряемого параметра в зависимости от воздействия температуры для конструкции вибрирующего элемента, представленного в патенте США №4813271 от 21.03.1989 г., показало следующие результаты:
- при температуре минус 60°С начальная частота собственных колебаний f-60 составила 53019 Гц;
- при температуре +60°С начальная частота собственных колебаний f+60 составила 52095 Гц;
- девиация начальной частоты собственных колебаний Δf в диапазоне температур ΔT=120°C составила 924 Гц;
- при температуре минус 60°С девиация частоты собственных колебаний Δfp-60 в диапазоне измеряемого давления ΔP=3 атм составила 2355 Гц;
- при температуре +60°С девиация частоты собственных колебаний Δfp+60 в диапазоне измеряемого давления ΔР=3 атм составила 2502 Гц;
- изменение девиации частоты собственных колебаний Δfp диапазоне температур ΔT=120°C составило 147 Гц.
Если принять девиацию частоты собственных колебаний вибрирующего элемента от измеряемого параметра (например, давления величиной 3 атм) ΔfH=2500 Гц, то приведенная дополнительная аддитивная температурная погрешность составит

или, переводя в аддитивную температурную чувствительность,

Приведенная дополнительная мультипликативная температурная погрешность составит

или, переходя к мультипликативной температурной чувствительности,

Полученные количественные оценки дополнительной аддитивной температурной погрешности и чувствительности не позволяют использовать подобные конструкции без применения специальных методов компенсации температурной погрешности, в особенности в высокоточных датчиках.
В настоящее время наибольшее распространение получил способ компенсации температурной погрешности, заключающийся во введении в конструкцию датчика термозависимого элемента (например, терморезистора), с которого снимается информация о температуре, с последующей ее обработкой и корректировкой информационного сигнала (например, патент США №4724707 от 20.08.1986 г.). Однако использование данного способа компенсации имеет ряд недостатков:
1. Вводится дополнительный канал измерения температуры.
2. Требуется математическая обработка сигнала с дополнительного канала и корректировка информационного сигнала с учетом дополнительного сигнала.
3. Отсутствует раздельная компенсация аддитивной и мультипликативной температурной погрешности и как результат не обеспечивается заданная точность измерения температуры для компенсации температурной погрешности.
Наибольшим недостатком данного метода является обеспечение заданной точности компенсации температурной погрешности. Так для высокоточных датчиков класса не более δ≤0.05% мультипликативная температурная чувствительность должна быть Sot≤0.5·10-5 1/°С, что на порядок меньше полученной количественной оценки суммарной температурной погрешности датчиков с монокристаллическим вибрирующим элементом. Тогда для обеспечения заданной точности канал для измерения температуры должен иметь погрешность не более 0.06°С (для рассмотренного ранее случая изменения температуры в диапазоне 120°С), что при существующих методах измерения температуры является проблематичным.
По режиму работы преобразователи с частотным выходом классифицируются следующим образом: работающие в режиме свободных колебаний, автоколебаний и вынужденных колебаний. В предлагаемом способе рассматриваются преобразователи с частотным выходом, работающие в режиме автоколебаний, которые включают в себя вибрирующий элемент (резонатор) и схему поддержания колебаний вибрирующего элемента, которая состоит из приемника сигналов для регистрации колебаний вибрирующего элемента, схемы настройки генератора, генератора гармонических колебаний и системы возбуждения (например, см. Боднер В.А. Приборы первичной информации: Учебник для авиационных вузов. - М.: Машиностроение, 1981). Схема работы таких преобразователей следующая: сигнал с генератора гармонических колебаний подается на систему возбуждения колебаний. Поскольку частота сигнала возбуждения близка к частоте собственных колебаний резонатора, то резонатор начинает колебаться на одной из гармоник, при этом амплитуда колебаний соответствует резонансной кривой этого резонатора. Максимальная амплитуда колебаний резонатора достигается при равенстве частоты сигнала возбуждения и частоты собственных колебаний резонатора. Колебания резонатора воспринимаются приемником сигналов, далее снятый сигнал преобразуется нормирующим усилителем. Сигнал с выхода нормирующего усилителя представляет собой гармонический сигнал требуемой амплитуды, частота которого соответствует частоте собственных колебаний резонатора. Кроме того, нормирующий усилитель можно рассматривать как часть схемы настройки генератора гармонических колебаний. С выхода нормирующего усилителя сигнал, предварительно преобразованный в сигнал постоянного напряжения, подается на генератор, а частота генератора определяется величиной подаваемого сигнала. При воздействии внешних факторов (давление, сила, температура и пр.) изменяется частота собственных колебаний резонатора, соответственно изменяется величина сигнала обратной связи (управляющего сигнала), подаваемого на генератор гармонических колебаний, частота генератора изменяется пропорционально изменению величины управляющего сигнала. Поскольку частота генератора становится равной измененной частоте собственных колебаний резонатора, то колебания резонатора опять происходят с максимальной амплитудой в резонансе. Таким образом, режим генерации обусловлен подачей сигнала положительной обратной связи с резонатора после усиления вновь на резонансный контур, при этом обратная связь включает в себя схему настройки генератора и генератор гармонических колебаний, управляемый напряжением.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа компенсации температурной погрешности датчика с вибрирующим элементом с выходным сигналом в виде девиации частоты, который позволил бы повысить точность минимизации температурной погрешности в условиях стационарных температурных режимов.
Технический результат заключается в повышении точности минимизации температурной погрешности датчика с вибрирующим элементом в условиях стационарных температурных режимов.
Указанный технический результат достигается следующим образом:
- в обратную связь включается инвертирующий сумматор, который производит сложение двух сигналов: постоянное напряжение для обеспечения начальной частоты собственных колебаний резонатора и выходной сигнал с детектора, преобразующего синусоидальное напряжение, поступающее с нормирующего усилителя, в постоянное напряжение, величина которого пропорциональна амплитуде синусоидального напряжения;
- аддитивная составляющая температурной погрешности компенсируется путем введения в схему инвертирующего сумматора термозависимого сопротивления Rβ, который изменяет начальный уровень частоты генератора с изменением температуры таким образом, что частота сигнала с генератора не зависит от температуры измерительного преобразователя, где расположено термозависимое сопротивление, при отсутствии измеряемого параметра;
- мультипликативная составляющая температурной погрешности компенсируется путем введения в инвертирующий сумматор термозависимого сопротивления Rα, который изменяет сигнал с детектора таким образом, что при изменении температуры девиация амплитуды сигнала от измеряемого параметра (например, давления), подаваемого на генератор, управляемый напряжением, не изменяется.
На фиг.1 приведена структурная схема преобразователя: 1 - генератор гармонических колебаний, управляемый напряжением, 2 - вибрирующий элемент (резонатор), 3 - нормирующий усилитель, 4 - детектор, преобразующий синусоидальный сигнал в постоянное напряжение, 5 - термозависимое сопротивление Rα для компенсации мультипликативной температурной погрешности, 6 - термозависимое сопротивление Rβ для компенсации аддитивной температурной погрешности, 7 - инвертирующий сумматор, Т - внешний воздействующий фактор - температура, Р - измеряемый параметр, например давление. Выход преобразователя представляет собой синусоидальный сигнал, девиация частоты которого соответствует девиации частоты колебаний вибрирующего элемента 2 от измеряемого параметра Р.
На фиг.2 представлена резонансная кривая, которая описывает зависимость амплитуды колебаний X вибрирующего элемента от частоты возбуждения f (в рассматриваемом случае - частоты генератора).
На фиг.3 приведена зависимость амплитуды колебаний вибрирующего элемента от частоты сигнала возбуждения при воздействии температуры. Резонансные кривые приведены без учета температурной аддитивной составляющей изменения амплитуды колебаний вибрирующего элемента от температуры. Вид резонансных кривых зависит от характеристик используемого материала, в частности коэффициента внутреннего трения (демпфирования).
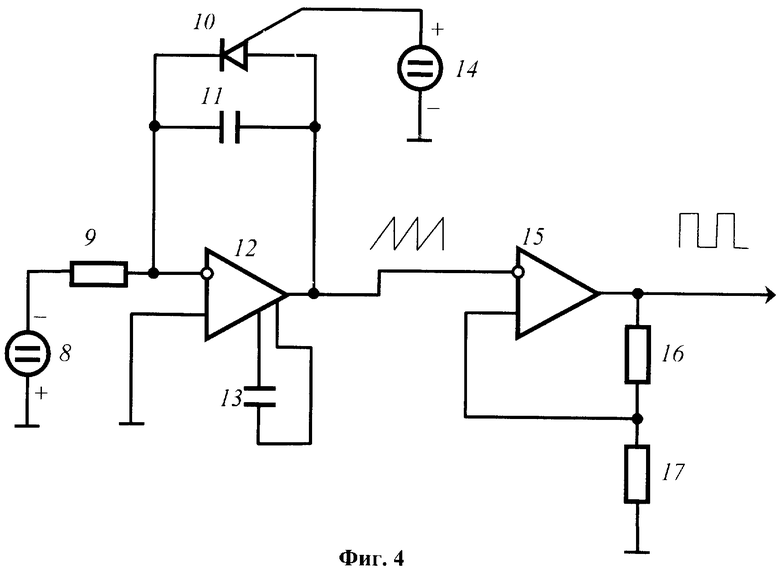
На фиг.4 представлен вариант генератора прямоугольных импульсов, управляемого напряжением, который реализован на двух операционных усилителях типа LM301: 8 - источник управляющего напряжения (в дальнейшем «E1»), 9 - сопротивление (в дальнейшем «R1Г»), 10 - тиристор (например, 2N6087), 11 - емкость (в дальнейшем «С1Г»), 12, 15 - операционный усилитель LM301, 13 - емкость, 14 - источник опорного напряжения (в дальнейшем «Е2»), 16 - сопротивление величиной 100 кОм, 17 - сопротивление величиной 35 кОм.
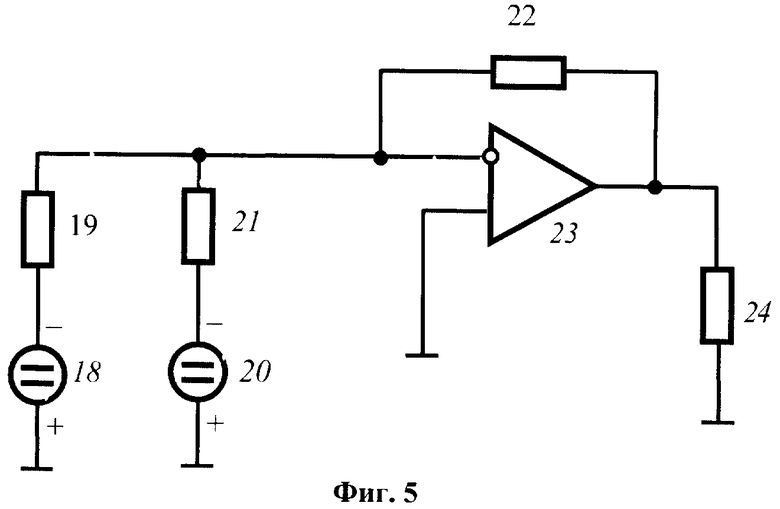
На фиг.5 приведен пример инвертирующего сумматора: 18 - напряжение Е0, соответствующее начальному уровню частоты генератора, 19 - сопротивление R1, 20 - напряжение ЕΔ, пропорциональное амплитуде колебаний вибрирующего элемента, 21 - сопротивление R2, 22 - сопротивление обратной связи RОС, 23 - операционный усилитель, 24 - сопротивление нагрузки RH.
Рассмотрим способ компенсации аддитивной температурной погрешности на примере резонансной кривой, представленной на фиг.2. При номинальной температуре и отсутствии измеряемого параметра амплитуда колебаний Х0 вибрирующего элемента усиливается при помощи усилителя и преобразуется в постоянное напряжение детектором такой величины, чтобы частота генератора f0 была равна частоте собственных колебаний вибрирующего элемента, т.е. колебания вибрирующего элемента происходят в резонансе. При увеличении измеряемого параметра (например, давления) вследствие несоответствия частоты генератора f0 частоте собственных колебаний вибрирующего элемента, которая увеличивается при увеличении измеряемого параметра и становится равной некоторой частоте f1 (для которой амплитуда колебаний вибрирующего элемента уменьшается до X1 без учета влияния обратной связи). Уменьшается и напряжение, подаваемое на вход управляемого напряжением генератора. Частота генератора в соответствии с изменением управляющего напряжения также изменится на величину, определяемую функциональной зависимостью частоты генератора от управляющего напряжения, и становится равной частоте собственных колебаний f1 вибрирующего элемента. Работа преобразователя при номинальной температуре всегда соответствует колебаниям вибрирующего элемента в резонансе (поскольку частота собственных колебаний вибрирующего элемента совпадает с частотой возбуждения генератора, управляемого напряжением), соблюдается постоянство амплитуды колебаний вибрирующего элемента. Диапазон работы преобразователя составляет от начальной частоты собственных колебаний f0 вибрирующего элемента (при отсутствии измеряемого параметра) до максимального значения частоты собственных колебаний fmax вибрирующего элемента (при действии максимально допустимого значения измеряемого параметра).
С другой стороны, изменение температуры измерительного преобразователя при отсутствии измеряемого параметра ведет к изменению частоты собственных колебаний вибрирующего элемента, появляется несоответствие между частотой генератора и частотой собственных колебаний вибрирующего элемента, т.е. колебания вибрирующего элемента происходят не в резонансе, значит, амплитуда колебаний вибрирующего элемента уменьшается в соответствии с резонансной кривой, и обратная связь отработает изменение частоты сигнала генератора. Это приводит к появлению дополнительной аддитивной температурной погрешности. Для уменьшения этой погрешности уменьшение амплитуды колебаний вибрирующего элемента при изменении температуры не должно отразиться на частоте сигнала на выходе управляемого напряжением генератора, т.е. частота генератора должна остаться прежней. Это может быть достигнуто путем введения в управляющую цепь генератора термозависимого элемента и выбора функциональной связи изменения величины термозависимого элемента от температуры преобразователя таким образом, чтобы напряжение, подаваемое на вход управляемого напряжением генератора, оставалось постоянным при изменении температуры.
Следовательно, колебания вибрирующего элемента происходят в резонансе при любом значении измеряемого параметра, но только при номинальной температуре. При изменении температуры начальная частота генератора будет оставаться постоянной и уже не будет соответствовать частоте собственных колебаний вибрирующего элемента. Это приводит к уменьшению амплитуды колебаний вибрирующего элемента без воздействия измеряемого параметра (см. точки А, которая соответствует резонансу, и А′, которые соответствуют случаю рассогласования частоты генератора и частоты собственных колебаний вибрирующего элемента при изменении температуры). А так как выходным сигналом является частота, то изменение амплитуды не сказывается на точности измерения.
Недостатком данного способа является возникновение неопределенности при изменении температуры при отсутствии измеряемого параметра, заключающейся в том, что амплитуда колебаний вибрирующего элемента изменяется при изменении температуры в соответствии с резонансной кривой, см. точки А', т.е. уменьшается как при уменьшении, так и при увеличении температуры. Тогда направление изменения частоты собственных колебаний вибрирующего элемента невозможно определить по знаку изменения амплитуды колебаний, а значит, и по знаку изменения управляющего напряжения. В этом случае необходимо использовать только одну ветвь резонансной кривой: левую - от частоты fmin до частоты f0 либо правую - от частоты f0 до частоты fmax. В случае использования левой ветви резонансной кривой частота fmin соответствует минимальной начальной рабочей частоте резонатора, т.е. при максимальной температуре преобразователя и при отсутствии измеряемого параметра, а частота f0 соответствует максимальной рабочей частоте преобразователя, т.е. при минимальной температуре преобразователя и при номинальном значении измеряемого параметра. В случае использования правой ветви резонансной кривой частота f0 соответствует минимальной начальной частоте генератора, т.е. при максимальной температуре преобразователя и при отсутствии измеряемого параметра, а частота fmax соответствует максимальной рабочей частоте преобразователя при номинальном значении измеряемого параметра. Выбор ветви резонансной кривой, по которой в дальнейшем работает преобразователь, зависит от функции преобразования генератора гармонических колебаний.
Рассмотрим способ компенсации мультипликативной погрешности. На фиг.3 приведена зависимость амплитуды колебаний вибрирующего элемента от частоты сигнала возбуждения при воздействии температуры без учета влияния аддитивной составляющей температурной погрешности и без учета влияния обратной связи. Частота f0 равна частоте собственных колебаний вибрирующего элемента, что соответствует резонансу. Поскольку при изменении температуры изменяется крутизна резонансной кривой от изменения модуля упругости и предполагая, что правая ветвь резонансной кривой относительно частоты f0 является рабочей, кривая 1 соответствует минимальной рабочей температуре, а кривая 2 соответствует максимальной рабочей температуре. Девиация амплитуды колебаний вибрирующего элемента при минимальной рабочей температуре составляет Х0-X-, что соответствует девиации частоты собственных колебаний вибрирующего элемента от f0 (при отсутствии измеряемого параметра) до f- (при воздействии номинального значения измеряемого параметра), для максимальной рабочей температуры девиация амплитуды колебаний вибрирующего элемента составляет Х0-X+, а девиация частоты собственных колебаний составляет от f0 (при отсутствии измеряемого параметра) до f+ (при воздействии номинального значения измеряемого параметра).
При максимальной рабочей температуре и отсутствии измеряемого параметра амплитуда колебаний Х0 вибрирующего элемента усиливается при помощи нормирующего усилителя и преобразуется в постоянное напряжение детектором такой величины, чтобы частота генератора f0 была равна частоте собственных колебаний вибрирующего элемента, т.е. колебания вибрирующего элемента происходят в резонансе. При увеличении измеряемого параметра (например, давления) и максимальной рабочей температуре вследствие несоответствия частоты генератора f0 частоте собственных колебаний вибрирующего элемента, которая увеличивается при увеличении измеряемого параметра и становится равной некоторой частоте f+, уменьшается и амплитуда колебаний вибрирующего элемента до величины Х+ (без учета влияния обратной связи), уменьшается напряжение, подаваемое на вход управляемого напряжением генератора. Частота генератора в соответствии с изменением управляющего напряжения также изменится на величину, определяемую функциональной зависимостью частоты генератора от управляющего напряжения, и становится равной частоте собственных колебаний f+ вибрирующего элемента. Таким образом, поддерживаются колебания вибрирующего элемента в резонансе при любом значении измеряемого параметра. При минимальной рабочей температуре изменению величины измеряемого параметра от минимального до номинального соответствует изменение частоты собственных колебаний вибрирующего элемента от f0 до f-, а амплитуда колебаний уменьшается от Х0 до Х- (без учета обратной связи). Поскольку благодаря обратной связи колебания вибрирующего элемента поддерживаются в резонансе, то частота генератора также изменяется от f0 до f- при изменении величины измеряемого параметра от минимального до номинального. Разница между значениями девиации частоты генератора от измеряемого параметра при максимальной и минимальной рабочих температурах и отражает величину мультипликативной температурной чувствительности, которая может быть скомпенсирована путем введения в схему управления генератором термозависимого элемента, тогда колебания вибрирующего элемента происходят в резонансе при любом значении измеряемого параметра, но только при той температуре, при которой производилась настройка схемы поддержания колебаний вибрирующего элемента. Изменение температуры приводит к изменению величины термозависимого элемента, следовательно, и величины управляющего напряжения, подаваемого на генератор. Это означает, что изменяется функциональная зависимость между изменением амплитуды колебаний вибрирующего элемента и требуемым изменением частоты генератора гармонических колебаний, поэтому колебания вибрирующего элемента происходят не в резонансе при изменении температуры и измеряемого параметра. При этом функциональная зависимость между изменением амплитуды колебаний вибрирующего элемента и требуемым изменением частоты генератора гармонических колебаний должна быть такой, чтобы девиация частоты выходного сигнала от измеряемого параметра оставалась постоянной при любом изменении температуры преобразователя.
Пример генератора прямоугольных импульсов, управляемого напряжением, приведен на фиг.4, который реализован на двух операционных усилителях типа LM301. Функция преобразования этого генератора, дающая связь частоты генерации f с управляющим напряжением E1, имеет вид:

Инвертирующий сумматор имеет следующую функцию преобразования:

где U - выходное напряжение;
ROC - сопротивление в обратной связи операционного усилителя;
Е0 - входное напряжение, соответствующее начальному уровню частоты генерации генератора;
R1 - сопротивление в цепи Е0,
ЕΔ - входное напряжение, пропорциональное амплитуде колебаний вибрирующего элемента;
R2 - сопротивление в цепи ЕΔ.
Как видно из выражения (2), путем изменения номиналов сопротивлений R1, R2 и ROC можно регулировать выходное напряжение сумматора, а значит, и частоту генератора. При этом выходное напряжение инвертирующего сумматора U является управляющим напряжением Е1 генератора прямоугольных импульсов.
Рассмотрим случай, когда термозависимыми элементами выступают сопротивление R1 и сопротивление ROC инвертирующего сумматора. Однако при одновременной компенсации погрешностей указанные сопротивления влияют друг на друга. Сопротивление ROC изменяет наклон градуировочной характеристики, а сопротивление R1 изменяет начальный уровень частоты собственных колебаний и девиацию частоты колебаний от измеряемого параметра. Поскольку изменение величины каждого из термозависимых сопротивлений влияет на статическую характеристику преобразователя, которая описывает зависимость частоты выходного сигнала от измеряемого параметра, то необходимо рассматривать одновременную компенсацию как аддитивной температурной погрешности, так и мультипликативной температурной погрешности с учетом взаимного влияния сопротивлений ROC и R1.
В соответствии с функцией преобразования генератора (1) частота f увеличивается при увеличении управляющего напряжения Е1, поэтому в цепь управляемого генератора необходимо ввести инвертирующий сумматор, который позволяет увеличивать управляющее напряжение E1 с уменьшением амплитуды колебаний вибрирующего элемента, что соответствует увеличению частоты собственных колебаний. В этом случае диапазоном работы преобразователя будет являться правая ветвь резонансной кривой. При этом генератор настраивается в резонанс с вибрирующим элементом при максимальной рабочей температуре и отсутствии измеряемого параметра, поскольку при максимальной рабочей температуре частота собственных колебаний вибрирующего элемента минимальна. Тогда с увеличением измеряемого параметра увеличивается частота собственных колебаний вибрирующего элемента, что приводит к уменьшению амплитуды колебаний в соответствии с резонансной кривой. Это изменение амплитуды колебаний вибрирующего элемента отрабатывается положительной обратной связью и частота генератора вновь становится равной частоте собственных колебаний вибрирующего элемента. Таким образом, колебания вибрирующего элемента происходят в резонансе, но только для той температуры, при которой производилась настройка схемы поддержания колебаний, т.е. для максимальной рабочей температуры. При изменении температуры колебания вибрирующего элемента происходят не в резонансе, но поскольку выходной сигнал преобразователя представляет собой зависимость девиации частоты от измеряемого параметра, то изменение амплитуды колебаний вибрирующего элемента не сказывается на точности измерения.
Введем следующие обозначения:
- начальная частота генератора f0+ при максимальной рабочей температуре:

где E1+ - управляющее напряжение, подаваемое на генератор при максимальной рабочей температуре и отсутствии измеряемого параметра;
- начальная частота генератора f0- при минимальной рабочей температуре:

где E1- - управляющее напряжение, подаваемое на генератор при минимальной рабочей температуре и отсутствии измеряемого параметра;
- частота генератора fp+ при максимальной рабочей температуре и номинальном значении измеряемого параметра:

где Е1р+ - управляющее напряжение, подаваемое на генератор при максимальной рабочей температуре и номинальном значении измеряемого параметра;
- частота генератора fp- при минимальной рабочей температуре и номинальном значении измеряемого параметра:

где E1p- - управляющее напряжение, подаваемое на генератор при минимальной рабочей температуре и отсутствии измеряемого параметра;
- девиация частоты генератора Δf+ от измеряемого параметра при максимальной рабочей температуре:

- девиация частоты генератора Δf- от измеряемого параметра при минимальной рабочей температуре:

- управляющее напряжение E1+, подаваемое на генератор при максимальной рабочей температуре и отсутствии измеряемого параметра, определяется по следующей формуле в соответствии с (2):

где R1+ и ROC+ - сопротивления R1 и ROC соответственно при максимальной рабочей температуре;
Е0 - величина напряжения, соответствующая начальному уровню частоты генератора при максимальной рабочей температуре, т.е. которое получается при настройке схемы в резонанс, это напряжение является постоянным для всех режимов работы;
EΔ+ - величина напряжения, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и отсутствии измеряемого параметра;
- управляющее напряжение E1-, подаваемое на генератор при минимальной рабочей температуре и отсутствии измеряемого параметра, определяется по следующей формуле:

где R1- и ROC- - сопротивления R1 и ROC соответственно при минимальной рабочей температуре;
ЕΔ- - величина напряжения, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и отсутствии измеряемого параметра;
- управляющее напряжение E1p+, подаваемое на генератор при максимальной рабочей температуре и номинальном значении измеряемого параметра, определяется по следующей формуле:

где ЕΔр+- величина напряжения, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и номинальном значении измеряемого параметра;
- управляющее напряжение E1p-, подаваемое на генератор при минимальной рабочей температуре и номинальном значении измеряемого параметра, определяется по следующей формуле:

где ЕΔр- - величина напряжения, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и номинальном значении измеряемого параметра.
Условие компенсации аддитивной температурной погрешности заключается в том, что частота генератора остается постоянной при изменении температуры, т.е. f0+=f0-, что равнозначно сохранению величины управляющего напряжения, подаваемого на генератор, с изменением температуры Е1+=Е1:

Условие компенсации мультипликативной температурной погрешности заключается в сохранении постоянной девиации частоты генератора при изменении температуры, т.е. Δf+=Δf-, что равнозначно сохранению постоянной девиации управляющего напряжения, подаваемого на генератор, (E1p+-Е1+)=(E1p--Е1-):

Для получения требуемого номинала компенсационного элемента и требуемой величины изменения номинала компенсационного элемента при изменении температуры в большинстве случаев используют последовательное (или параллельное) соединение термонезависимого элемента и термозависимого элемента. Поэтому сопротивление ROC состоит из термонезависимого сопротивления RH и термозависимого сопротивления Rα для компенсации мультипликативной температурной погрешности, соединенных последовательно, а общее сопротивление определяется как ROC=RH+Rα. При этом величина термозависимого сопротивления Rα изменяется от температуры по зависимости Rαt=Rα·(1+αα·ΔT), где Rα - начальное значение термозависимого сопротивления, т.е. величина сопротивления при нормальной температуре, αα - температурный коэффициент сопротивления (ТКС) термозависимого сопротивления Rα, ΔT - диапазон изменения температуры.
Аналогично сопротивлению ROC сопротивление R1 состоит из термонезависимого сопротивления R1H и термозависимого сопротивления Rβ для компенсации аддитивной температурной погрешности, соединенных последовательно, а общее сопротивление определяется как R1=R1H+Rβ. При этом величина термозависимого сопротивления Rβ изменяется от температуры по зависимости Rβt=Rβ·(1+αβ·ΔT), где Rβ - начальное значение термозависимого сопротивления, т.е. величина сопротивления при нормальной температуре, αβ - ТКС термозависимого сопротивления Rβ, ΔT - диапазон изменения температуры.
Введем следующие обозначения: величина термозависимого сопротивления Rα при максимальной рабочей температуре Rα+=Rα(1+αα·ΔT1), где ΔТ1 - диапазон изменения температуры от нормальной до максимальной рабочей температуры; величина термозависимого сопротивления Rα при минимальной рабочей температуре Rα-=Rα(1+αα·ΔT2), где ΔT2 - диапазон изменения температуры от нормальной до минимальной рабочей температуры; величина термозависимого сопротивления Rβ при максимальной рабочей температуре Rβ+=Rβ(1+αβ·ΔT1); величина термозависимого сопротивления Rβ при минимальной рабочей температуре Rβ-=Rβ(1+αβ·ΔT2).
Поскольку настройка рассматриваемой схемы производится при максимальной рабочей температуре, то величина сопротивления ROC, полученная при предварительной настройке, равна ROC+=RH+Rα+, а сопротивление R1 равно R1+=R1H+Rβ+.
Выражение (13) преобразуем к следующему виду:

или

где

b=(RH+Rα·(1+αα·ΔT2))·E0·(1+αβ·ΔT1)-(RH+Rα·(1+αα·ΔT1))·E0·(1+αβ·ΔT2)+
+((RH+Rα·(1+αα·ΔT2)·EΔ--(RH+Rα·(1+αα·ΔT1))·EΔ+)·R1H·(2+αβ·(ΔT2+ΔT1)),


- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и отсутствии измеряемого параметра,

- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и отсутствии измеряемого параметра.
Перепишем также выражение (14) в следующем виде:

или

где

- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и номинальном значении измеряемого параметра.

- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и номинальном значении измеряемого параметра.
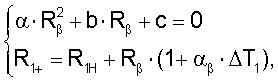
Решая следующие системы уравнений

и

находят требуемые значения термозависимых сопротивлений Rα и Rβ. Для полупроводниковых материалов может быть получен отрицательный ТКС, абсолютная величина которого лежит в пределах 0.003÷0.2 1/°С, для нихрома Х20Н80, используемого при формировании напыляемых сопротивлений, ТКС не превышает 1·10-3 1/°С, для сплава Х20Н75Ю ТКС не превышает 5·10-4 1/°С, для сплава на основе силицидов П65ХС ТКС не превышает 1·10-4 1/°С. Поскольку требуемые номиналы термозависимых сопротивлений Rα и Rβ всегда отличаются от номиналов реально напыленных сопротивлений, то последние изготавливаются заведомо меньшей величины с последующей их подгонкой номиналов до расчетных значений, например, с использованием методов электроэрозионной или лазерной подгонки.
Пример.
Для получения частоты генератора 52095 Гц, что соответствует начальному уровню частоты при максимальной рабочей температуре рассматриваемого преобразователя, выбираем следующие номиналы элементов генератора в соответствии с функцией преобразования (1): сопротивление R1Г=1 кОм, емкость C1Г=7.678 нФ, опорное напряжение Е2=6 В, управляющее напряжение Е1=2 В. Тогда в соответтвии с выражением (2)

Пусть величины сопротивлений ROC+=R1+=R2=1 кОм. Предположим, что выходное напряжение с детектора составляет EΔ+=0.5 В (величина выходного напряжения зависит от схемной реализации детектора, выходное напряжение которого пропорционально амплитуде входного напряжения). Тогда требуемое значение напряжения E0 в соответствии с последним выражением равно минус 2.5 В для получения управляющего напряжения E1=2 В. Для получения частоты генератора 53019 Гц при минимальной рабочей температуре величина выходного напряжения с детектора должна быть равна

Кроме того, при номинальном значении измеряемого параметра и максимальной рабочей температуре выходной сигнал с детектора 
что соответствует девиации частоты от измеряемого параметра при максимальной температуре Δf+60=2502 Гц. Выходной сигнал с детектора при минимальной рабочей температуре

что соответствует девиации частоты от измеряемого параметра при минимальной температуре Δf-60=2355 Гц.
Для рассматриваемого случая системы уравнений (17) и (18) имеют решение при отрицательном ТКС αα и отрицательном ТКС αβ. Предположим, что при изготовлении ТКС αα получился равным минус 0.001 1/К, а ТКС αβ равным минус 0.003 1/К. Тогда требуемые значения сопротивлений в соответствии с системами уравнений (18) и (19) Rα=520.17 Ом (при нормальной температуре), RH=500.637 Ом, Rβ=180.46 Ом (при нормальной температуре), R1Н=841.196 Ом.
Подставляя найденные значения сопротивлений в выражения (9) и (10):
видим, что управляющее напряжение E1 при максимальной и минимальной рабочих температурах равно 2 В, что при выбранных номиналах элементов генератора соответствует частоте 52095 Гц (см. выражение (1)), т.е. начальный уровень частоты генератора не зависит от температуры, что означает компенсацию аддитивной температурной погрешности при максимальной и минимальной рабочих температурах.
Подставляя найденные значения сопротивлений в выражения (11) и (12):
видим, что девиация управляющего напряжения E1 (Е1p+-E1+ и E1p--E1-) при максимальной и минимальной рабочих температурах равна 0.096 В, что в соответствии с выражениями (7) и (8) дает девиацию частоты генератора 2501 Гц, т.е. девиация частоты от измеряемого параметра не зависит от температуры, что означает компенсацию мультипликативной температурной погрешности при максимальной и минимальной рабочих температурах.
Таким образом, производится одновременная компенсация аддитивной и мультипликативной температурной погрешности рассматриваемого преобразователя с вибрирующим элементом.


Изобретение относится к области приборостроения и может быть использовано при измерении силы, давления, ускорения и т.п. Технический результат - повышение точности минимизации температурной погрешности датчика с вибрирующим элементом в условиях стационарных температурных режимов. Для достижения данного результата в конструкцию датчика введено термозависимое сопротивление с отрицательным знаком температурного коэффициента сопротивления (ТКС). Одно из термозависимых сопротивлений Rα предназначено для компенсации мультипликативной температурной погрешности, а другое термозависимое сопротивление Rβ предназначено для компенсации аддитивной температурной погрешности. Производят предварительную настройку схемы поддержания колебаний вибрирующего элемента при максимальной рабочей температуре. Фиксируют начальную частоту генератора гармонических колебаний и девиацию частоты генератора от номинального значения измеряемого параметра при минимальной и максимальной рабочих температурах, а также значения сопротивлений R1+ и Rос+ в цепи инвертирующего сумматора при максимальной рабочей температуре. Определяют значения ТКС αα и αβ термозависимых сопротивлений Rα и Rβ соответственно. Находят требуемые значения термозависимых сопротивлений Rβ и Rα и термонезависимых сопротивлений RH и R2H, решая описанные в изобретении системы уравнений. Производят подгонку номиналов установленных в датчике термозависимых сопротивлений Rβ и Rα до расчетного значения. Подключают термозависимое сопротивление Rβ последовательно с термонезависимым сопротивлением RH и термозависимое сопротивление Rα последовательно с термонезависимым сопротивлением R2H в цепь инвертирующего сумматора. 5 ил.
Способ компенсации температурной погрешности датчика с вибрирующим элементом, включающий в себя генератор гармонических колебаний, управляемый напряжением, нормирующий усилитель, детектор и инвертирующий сумматор в цепи положительной обратной связи и термозависимое сопротивление с отрицательным температурным коэффициентом сопротивления (ТКС), установленное непосредственно в зоне вибрирующего элемента, и частотным выходным сигналом, отличающийся тем, что в конструкцию датчика непосредственно в зоне вибрирующего элемента вводят дополнительное термозависимое сопротивление с отрицательным знаком ТКС, при этом одно из термозависимых сопротивлений Rα предназначено для компенсации мультипликативной температурной погрешности, а другое термозависимое сопротивление Rβ предназначено для компенсации аддитивной температурной погрешности, а их номиналы должны быть заведомо меньше номиналов термозависимых сопротивлений, необходимых для компенсации температурных погрешностей, производят предварительную настройку схемы поддержания колебаний вибрирующего элемента при максимальной рабочей температуре, фиксируют начальную частоту генератора гармонических колебаний и девиацию частоты генератора от номинального значения измеряемого параметра при минимальной и максимальной рабочих температурах, а также значения сопротивлений R1+ и ROC+ в цепи инвертирующего сумматора при максимальной рабочей температуре, определяют значения ТКС αα и αβ термозависимых сопротивлений Rα и Rβ соответственно, находят требуемые значения термозависимых сопротивлений Rβ и Rα и термонезависимых сопротивлений RH и R1H, решая системы уравнений
 и
и
где

b=(RH+Rα·(1+αα·ΔT2))·E0·(1+αβ·ΔT1)-(RH+Rα·(1+αα·ΔT1))·E0·(1+αβ·ΔT2)+
+((RH+Rα·(1+αα·ΔT2)·EΔ--(RH+Rα·(1+αα·ΔT1))·EΔ+)·R1H·(2+αβ·(ΔT2+ΔT1)),

 - величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и отсутствии измеряемого параметра,
- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и отсутствии измеряемого параметра,
 - величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и отсутствии измеряемого параметра,
- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и отсутствии измеряемого параметра,
 - величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и номинальном значении измеряемого параметра,
- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при минимальной рабочей температуре и номинальном значении измеряемого параметра,
 - величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и номинальном значении измеряемого параметра,
- величина напряжения с детектора, пропорциональная амплитуде колебаний вибрирующего элемента при максимальной рабочей температуре и номинальном значении измеряемого параметра,
E0 - входное напряжение инвертирующего сумматора, соответствующее начальному уровню частоты генерации генератора;
R1Н - термонезависимое сопротивление, включаемое последовательно с термозависимым сопротивлением Rβ, в цепи инвертирующего сумматора;
ΔT1 - диапазон изменения температуры от нормальной до максимальной рабочей температуры;
R1Г - сопротивление в цепи генератора гармонических колебаний;
С1Г - емкость в цепи генератора гармонических колебаний;
Е2 - опорное напряжение генератора гармонических колебаний;
f0+- начальный уровень частоты генератора гармонических колебаний при максимальной рабочей температуре;
RH - термонезависимое сопротивление, включаемое последовательно с термозависимым сопротивлением Rα, в цепи инвертирующего сумматора;
ΔT2 - диапазон изменения температуры от нормальной до максимальной рабочей температуры;
f0 - начальный уровень частоты генератора гармонических колебаний при минимальной рабочей температуре;
fр+ - частота генератора гармонических колебаний при максимальной рабочей температуре и номинальном значении измеряемого параметра;
fp- - частота генератора гармонических колебаний при минимальной рабочей температуре и номинальном значении измеряемого параметра;
Δf+ - девиация частоты генератора от измеряемого параметра при максимальной температуре;
Δf- - девиация частоты генератора от измеряемого параметра при минимальной температуре,
находят требуемые значения термозависимых сопротивлений Rβ и Rα и термонезависимых сопротивлений R1H и RH, производят доводку номиналов термозависимых сопротивлений Rβ и Rα до расчетного значения, подключают термозависимое сопротивление Rβ последовательно с термонезависимым сопротивлением R1Н и термозависимое сопротивление Rα последовательно с термонезависимым сопротивлением R2Н в цепь инвертирующего сумматора.
| US 4724707 А, 16.02.1988 | |||
| СПОСОБ КОМПЕНСАЦИИ АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2005 |
|
RU2282162C1 |
| US 4813271 А, 21.03.1989 | |||
| СГИБОВ А.П., ТЕМПЕРАТУРНАЯ КОМПЕНСАЦИЯ УХОДА НУЛЯ МОСТОВОГО ПРЕОБРАЗОВАТЕЛЯ, ПРИБОРЫ И СИСТЕМЫ УПРАВЛЕНИЯ, 1975, N11 | |||
| Способ балансировки и температурной компенсации мостовых схем тонкопленочных тензорезисторных датчиков | 1983 |
|
SU1174738A1 |
| Способ настройки тензометрических мостов | 1990 |
|
SU1758563A1 |

