Область техники, к которой относится изобретение
Изобретение относится к системной функции, которая обеспечивает отображение курса и пространственного положения на дисплеях в самолете, например отображение их на лобовом стекле (ОЛС), в случае отказов оборудования для стандартного отображения пространственного положения. Системная функция, которая по-английски называется Attitude and Heading Reference System, сокращенно AHRS, (опорная система пространственного положения и курса) дополняет стандартное отображение курса и пространственное положение самолета. Указанное отображение предназначено для того, чтобы помочь пилоту выйти из сложных пространственных положений и затем облегчить возвращение на базу/посадку.
Уровень техники
Для того чтобы не потерять отображение пространственного положения и курса на самолете в случае отказа стандартно используемой инерциальной навигационной системы (ИНС), требуется резервная система. При хорошей видимости пилот может выполнять полет, используя в качестве системы отсчета пространственного положения линию горизонта, но при этом остается большая неопределенность для определения курса. При плохой погоде, облачности и ночью, когда линия горизонта не видна, пилот может легко потерять ориентиры, в результате чего его самолет и он сам окажутся в опасной ситуации.
Системы AHRS независимо от стандартных систем вычисляют углы пространственного положения (тангажа и крена) и курс. Такая система непрерывно отображает пилоту положение самолета на дисплее в кабине экипажа. Необходимость в резервной системе для пространственного положения может быть столь велика, что самолету при ее отсутствии не дают разрешение на полет.
В настоящее время резервные системы существуют в виде блока AHRS. Такой блок содержит, среди прочего, гироскопы, которые измеряют изменения углового положения самолета (тангаж, крен и рыскание). Блок также содержит акселерометры и магнитный датчик. Акселерометры используются для того, чтобы установить горизонтальную плоскость. Магнитные датчики используются для нахождения северного магнитного полюса. Такой тип системы AHRS, реализованный в виде аппаратных средств, дорог и связан с установкой тяжелого и громоздкого оборудования на самолете. Для преодоления этих недостатков в данном описании предлагается комплексная система AHRS, в которой вместо датчиков тех типов, которые содержатся в блоке AHRS, используются датчики, уже имеющиеся на самолете, причем они при стандартном использовании не предназначены для вычислений AHRS и, следовательно, отчасти имеют значительно худшие рабочие характеристики.
Указанные углы вычисляются с помощью имеющихся на самолете датчиков. Задачей является использование сигналов существующих гироскопов угловых скоростей и поддержка вычислений на основе других имеющихся на самолете первичных данных. Гироскопы угловых скоростей обычно используются в системах управления и в общем случае имеют существенно больший дрейф, чем гироскопы для навигации.
Сущность изобретения
Согласно одному аспекту изобретения предлагается способ для комплексного вычисления резервного пространственного положения и резервного курса с помощью имеющихся на самолете данных, как определено в формуле изобретения.
Разработаны различные варианты осуществления изобретения. В одном варианте курс самолета считается известным, а в другом курс вычисляется на основе данных от датчика магнитного курса. Когда курс известен, объем вычислений может быть существенно уменьшен.
При известном курсе (резервный курс) пространственное положение вычисляется путем взвешивания вместе сигналов от гироскопов угловых скоростей в системе управления полетом самолета, информации, содержащейся в аэродинамических данных (высота, скорость, угол атаки) и информации о курсе (резервный курс).
Когда курс не известен, пространственное положение и курс вычисляются согласно одному варианту осуществления изобретения с помощью фильтров Калмана путем взвешивания вместе сигналов от гироскопов угловых скоростей в системе управления самолетом, информации, содержащейся в аэродинамических данных (высота, скорость, угол атаки и угол бокового скольжения), а также информации, поступающей от имеющегося на самолете датчика магнитного курса.
Одним из преимуществ комплексной AHRS согласно данному аспекту изобретения является то, что она существенно дешевле известной системы AHRS, базирующейся на своих собственных датчиках, если можно использовать датчики, уже существующие на самолете. Это также улучшает массогабаритные характеристики самолета.
Описание чертежей
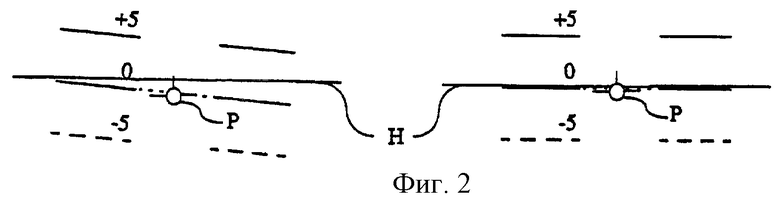
Фиг.1 - функциональная схема AHRS при известном курсе,
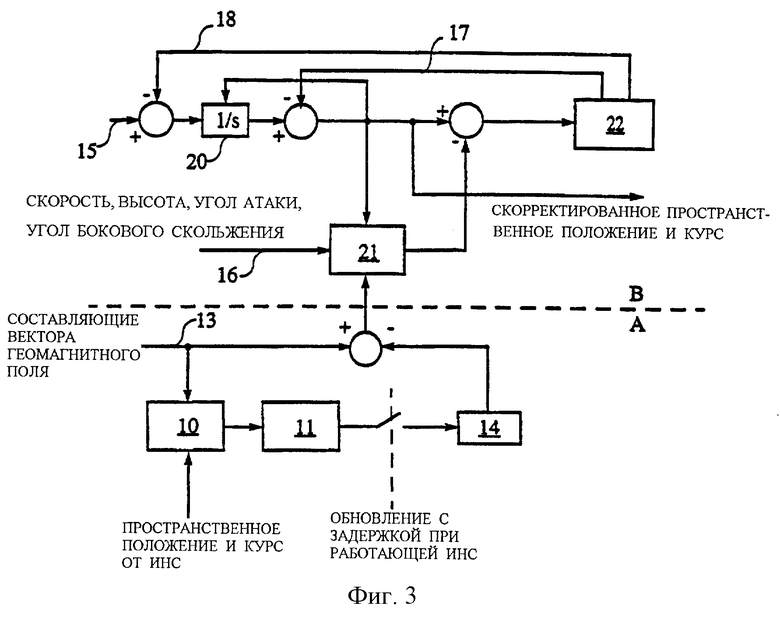
фиг.2 - схема, иллюстрирующая принцип выравнивания пространственного положения самолета при его отображении на лобовом стекле: слева - без выравнивания, а справа - с выравниванием,
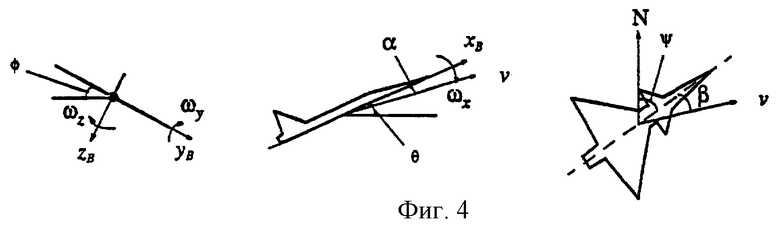
фиг.3 - блок-схема резервной системы для пространственного положения и курса,
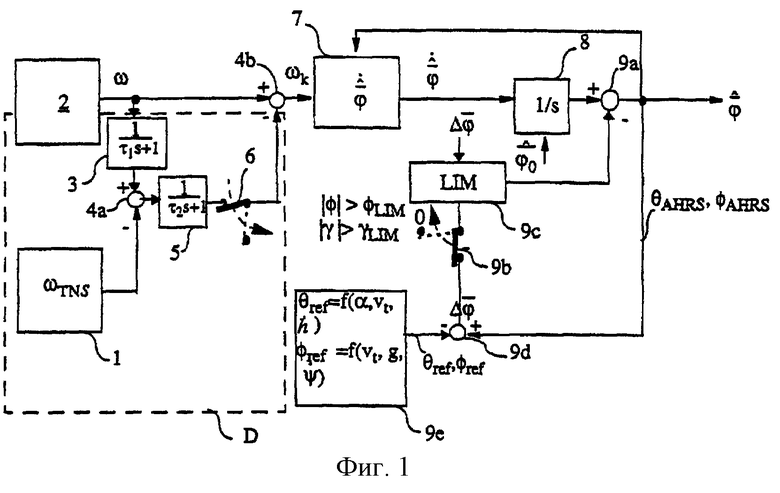
фиг.4 - три изображения пространственного положения и курса самолета с осями в координатной системе отсчета, связанной с корпусом, а также угол атаки и угол бокового скольжения,
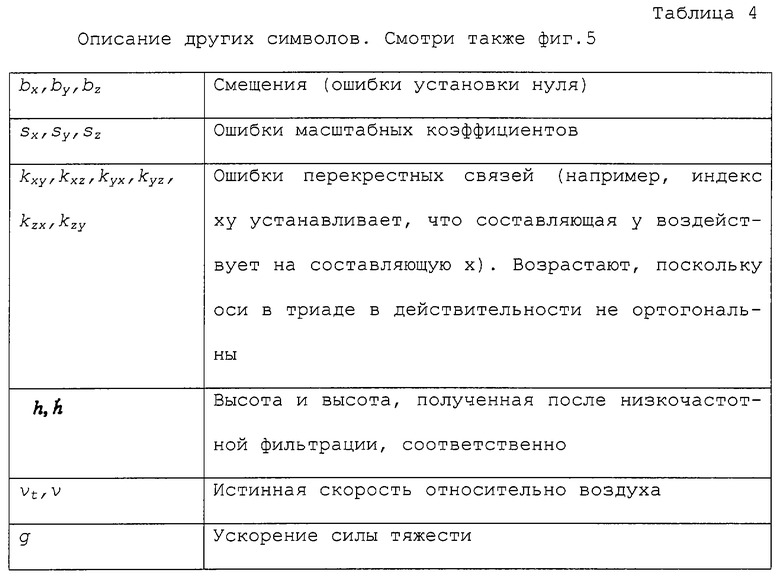
фиг.5 - график, иллюстрирующий влияние ошибок установки нуля и ошибок масштабных коэффициентов на измеряемую величину.
Описание вариантов осуществления изобретения
Ниже со ссылками на указанные чертежи описывается несколько вариантов осуществления изобретения. Согласно изобретению предлагаются способы для комплексного вычисления пространственного положения и курса с помощью имеющихся на самолете данных, как это определено в формуле изобретения.
В более простом варианте курс самолета считается известным. В другом варианте курс вычисляется, в данном случае на основе информации от датчика магнитного курса.
Вычисление AHRS при известном курсе
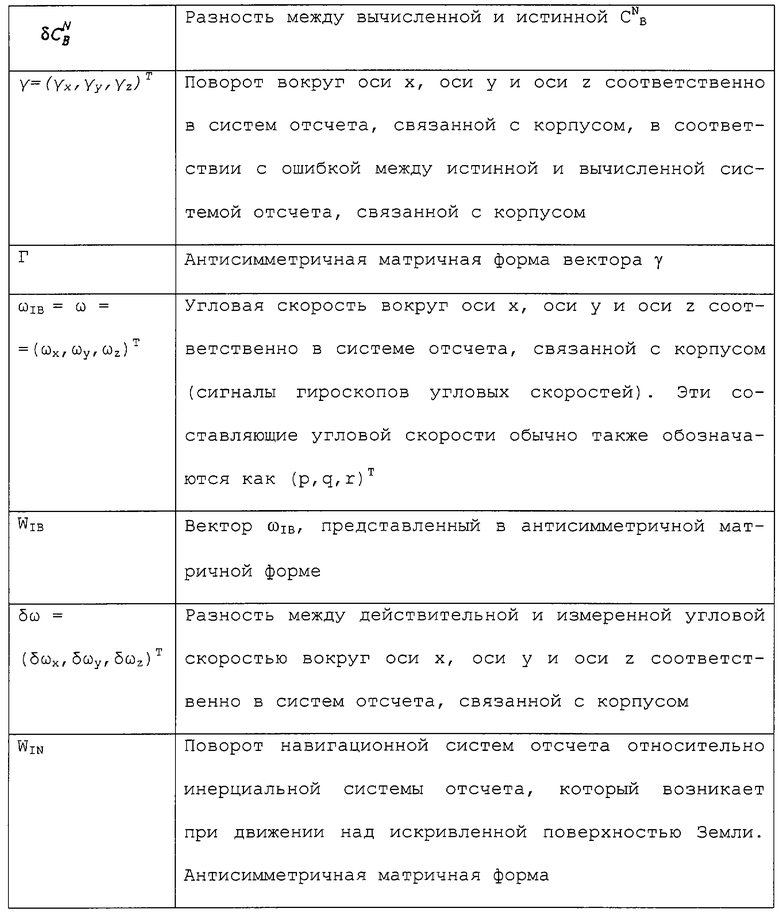
Сигналы от трех гироскопов 2 угловых скоростей, жестко смонтированных на корпусе, используются для определения ориентации самолета относительно системы N координат (навигационная система отсчета). Гироскопы 2 угловых скоростей измеряют угловые скорости вокруг трех координатных осей (х, у, z) относительно корпуса. Угловые скорости обычно обозначаются как ω х или р (вращение вокруг оси х), ω у или q (вращение вокруг оси у) и ω z или r (вращение вокруг оси z). Ориентация между системой В координат относительно корпуса и системой N задается эйлеровыми углами θ , φ ψ . Однако, поскольку курс известен, интерес представляют только углы θ и φ . Если предположить, что система N является инерциальной системой, которая ориентирована так, что ось z параллельна гравитационному вектору Земли, можно показать, что

Если гироскопы 2 были бы идеальными, начальные значения θ 0 и φ 0 были бы абсолютно точными, и если используемый метод интегрирования был бы точным, углы пространственного положения можно бы было получить, решив уравнение (1). Однако на практике ни одно из этих предварительных условий не выполняется; наоборот, ошибки датчиков и тому подобное вызывают расходимость решения, что относительно быстро приводит к неприемлемым результатам.
Первопричиной, предопределяющей рост ошибок, являются ошибки датчиков в виде, среди прочих, ошибок установки нуля, ошибок масштабных коэффициентов, ошибок из-за монтажа, выполненного с перекосом, и дрейфа из-за ускорений. При горизонтальном полете ошибка установки нуля является доминирующим фактором возрастания ошибки.
Из-за несовершенства датчиков и неточности начальных значений уравнение (1) дает оценку производных углов крена и тангажа согласно выражению
Разность между ожидаемым  AHRS (вычисляемым в соответствии с функцией AHRS) и "действительным"
AHRS (вычисляемым в соответствии с функцией AHRS) и "действительным"  ref (вычисляемым из аэродинамических данных, первичных данных) углов пространственного положения составляет оценку ошибки пространственного положения
ref (вычисляемым из аэродинамических данных, первичных данных) углов пространственного положения составляет оценку ошибки пространственного положения

Использование  описано ниже.
описано ниже.
Окончательно углы пространственного положения задаются выражением
где  составляет расчетные начальные значения.
составляет расчетные начальные значения.
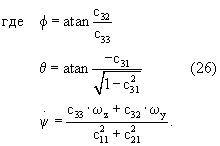
Вычисление  ref
ref
Формула  используется при вычислении θ ref.
используется при вычислении θ ref.  представляет собой сигнал высоты после высокочастотной фильтрации. vt - истинная воздушная скорость.
представляет собой сигнал высоты после высокочастотной фильтрации. vt - истинная воздушная скорость.
Формула φ ref=arctan(vt·( )/g) используется при вычислении φ ref.
)/g) используется при вычислении φ ref. представляет собой сигнал курса (резервный курс) после высокочастотной фильтрации.
представляет собой сигнал курса (резервный курс) после высокочастотной фильтрации.
Нуль-коррекция гироскопов угловых скоростей
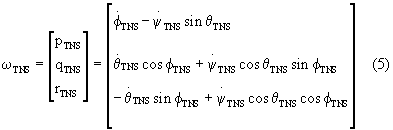
Ошибки установки нуля в гироскопах угловых скоростей сильно зависят от температуры. Для достижения рабочей температуры для гироскопов может понадобиться от 20 до 30 минут. Это означает, что отказ ИНС сразу после взлета может привести к ошибкам установки нуля, если полет затем продолжался. Однако с момента подачи напряжения на гироскопы 2 до момента взлета самолета уходит некоторое время, а это значит, что к началу полета температурная стабилизация частично выполнена. Также предположим, что в течение короткого интервала времени возможно приземление самолета в случае отказа ИНС при взлете. Для минимизации ошибок установки нуля из-за гироскопов 2 угловых скоростей выполняется нуль-коррекция гироскопов угловой скорости с помощью программных средств. Эта коррекция включает сравнение сигналов со (р, q и r) от гироскопов 2 угловых скоростей с соответствующим сигналом от ИНС, смотри уравнение (5), путем создания разности в блоке 4а. Разность пропускается через фильтр 5 низких частот и добавляется к сигналом гироскопов угловых скоростей в генераторе 4b разности, где вместо ω при вычислениях AHRS используется сигнал ω k, который обозначает сигналы гироскопов после нуль-коррекции. Этот процесс выполняется непрерывно, пока работает ИНС. В случае отказа ИНС для остальной части полета используются результаты самой последней нуль-коррекции.
Блок-схема реализации функции AHRS с нуль-коррекцией гироскопов угловых скоростей показана на фиг.1. Фиг.1 схематически иллюстрирует функции AHRS. Нуль-коррекция гироскопов угловых скоростей выполняется блоками, показанными внутри области D, ограниченной пунктирными линиями.
ψ tns, θ tns и φ tns пропускают через фильтр высоких частот для получения  . Они используются в уравнении (5), которое дает ω TNS, (pTNS, qTNS, rTNS) в первом блоке 1. ω (р, q, r), которые получают в виде сигналов от гироскопов, обозначенных как 2, подвергают низкочастотной фильтрации, пропуская их через фильтр 3 низких частот прежде, чем в блоке 4а создается соответствующая разность.
. Они используются в уравнении (5), которое дает ω TNS, (pTNS, qTNS, rTNS) в первом блоке 1. ω (р, q, r), которые получают в виде сигналов от гироскопов, обозначенных как 2, подвергают низкочастотной фильтрации, пропуская их через фильтр 3 низких частот прежде, чем в блоке 4а создается соответствующая разность.
Сигнал разности между сигналами ω TNS, (pTNS, qTNS, rTNS) и сигналами ω (р, q, r) подвергается низкочастотной фильтрации с большой постоянной времени в фильтре 5 низких частот, т.е. среднее значение разности создается на большом временном интервале. Фильтр 5 инициализируется с меньшей постоянной времени при отрыве переднего колеса на взлете. После отказа электропитания фильтр 5 мгновенно инициализируется.
В блоке 7 вычисляется  , после чего в средстве 8 интегрирования выполняется интегрирование согласно уравнению (4), и к результату добавляются начальные условия
, после чего в средстве 8 интегрирования выполняется интегрирование согласно уравнению (4), и к результату добавляются начальные условия  . В генераторе 9а к разности добавляется сигнал
. В генераторе 9а к разности добавляется сигнал  , но при этом он при некоторых условиях переключения, например, когда
, но при этом он при некоторых условиях переключения, например, когда  и модуль
и модуль  отключается с помощью переключателя 9b. Сигнал
отключается с помощью переключателя 9b. Сигнал  проходит через ограничитель 9с. Величина выходного сигнала из ограничителя 9с зависит от величины сигнала
проходит через ограничитель 9с. Величина выходного сигнала из ограничителя 9с зависит от величины сигнала  (т.е. входного сигнала в ограничитель 9с). Сигнал
(т.е. входного сигнала в ограничитель 9с). Сигнал  создается согласно уравнению (3) в генераторе разности 9d, на который подают вычисленные углы пространственного положения
создается согласно уравнению (3) в генераторе разности 9d, на который подают вычисленные углы пространственного положения  AHRS и "действительные" углы пространственного положения
AHRS и "действительные" углы пространственного положения  ref от датчиков (первичные данные), обозначенные как 9е.
ref от датчиков (первичные данные), обозначенные как 9е.
Несмотря на компенсацию, вычисленные на основе AHRS углы содержат незначительные ошибки установки нуля. Поскольку выходные сигналы используются для отображения на лобовом стекле, они корректируются путем использования Δ ϕ при крене и Δ ϕ при тангаже, чтобы выровнять изображение SI, пока не будет получено стабилизированное положение. Обратимся к фиг.2, где линия Н имитирует действительную линию горизонта, а самолет обозначен символом Р. Заметим, что такое выравнивание ОЛС (отображение на лобовом стекле) имеет место, когда изображение самолета находится в рамках описанных выше ограничений.
Вычисление AHRS, когда курс также подлежит вычислению
На фиг.3 схематически показаны модули, образующие стандартные блоки для другого варианта комплексной AHRS, а также показано, как эти модули связаны друг с другом для создания резервного пространственного положения и резервного курса.
На фиг.3 показан принцип действия резервной системы согласно данному аспекту изобретения. Система состоит из двух подсистем А и В; первая подсистема А выполняет оценку ошибок при измерениях геомагнитного поля, а другая подсистема В выполняет вычисление резервных пространственного положения и курса. Всего получается пять стандартных блоков, где первое средство 10 измерения и первый фильтр 11 Калмана образуют стандартные блоки в первой подсистеме А, а средство (1/s) 20 интегрирования, средство 21 измерения и второй фильтр 22 Калмана образуют стандартные блоки во второй подсистеме В.
Измеренные средством 10 измерения составляющие вектора поля в системе координат относительно системы отсчета, соединенной с корпусом, преобразуются в систему координат с ориентацией на север, восток и вертикально, которая называется навигационной системой отсчета. Такое преобразование выполняют, используя пространственное положение и курс, полученные от инерциальной навигационной системы самолета (ИНС) через проводное соединение 12. Составляющие вектора геомагнитного поля получают от датчика магнитного курса, имеющегося на самолете, при этом эти составляющие поступают через проводное соединение 13. Затем в первом фильтре 11 Калмана на основе знания номинального характера составляющих вектора поля оцениваются ошибки в этих составляющих, после чего значения оценок запоминаются в памяти 14.
Подсистема А (средство 10 измерения и фильтр 11 Калмана) используется только тогда, когда ИНС работает правильно. В случае отказа ИНС используется самая последняя из возможных оценок ошибок в составляющих вектора поля, т.е. та, которая была записана в памяти 14. Поскольку во многих случаях может оказаться трудным решить, работает ли ИНС должным образом, самая последняя оценка не должна использоваться. Для того чтобы разрешить эту ситуацию, в качестве оценок ошибок измеренного геомагнитного поля берутся оценки, полученные по меньшей мере за один полет до данного полета, т.е. оценки, которые были записаны в память при предыдущем полете или ранее.
Средство 20 интегрирования получает информацию об угловых скоростях, в данном случае для трех координатных осей х, у и z в системе отсчета относительно корпуса. Они обычно обозначаются как ω х или р (вращение вокруг оси х), ω y или q (вращение вокруг оси у) и ω z или г (вращение вокруг оси z). Эту информацию получают от гироскопов угловых скоростей системы управления и подают по проводному соединению 15 в средство 20 интегрирования, где пространственное положение и курс интегрируются посредством матрицы преобразования.
Второе средство 21 измерения представляет собой усовершенствованное первое средство 10 измерения, при этом во втором средстве используются составляющие вектора поля из первого средства 11 измерения. Вдобавок с помощью данных, имеющихся в существующих аэродинамических данных, данных от существующих датчиков силы скольжения и данных, которые поступают в средство 21 измерения через проводное соединение 16, вычисляются углы крена и тангажа. С помощью второго фильтра 22 Калмана в первую очередь вычисляются ошибки пространственного положения и курса, которые возрастают в процессе интегрирования сигналов гироскопов угловых скоростей системы управления. Во вторых, фильтр 22 Калмана используется для оценки смещений в гироскопах угловых скоростей, т.е. смещений в р, q и r.
Первое средство 10 измерения
Теоретически геомагнитное поле можно вычислить в любом месте на Земле. Чтобы сделать это, используется, например, IGRF (Международное эталонное геомагнитное поле).
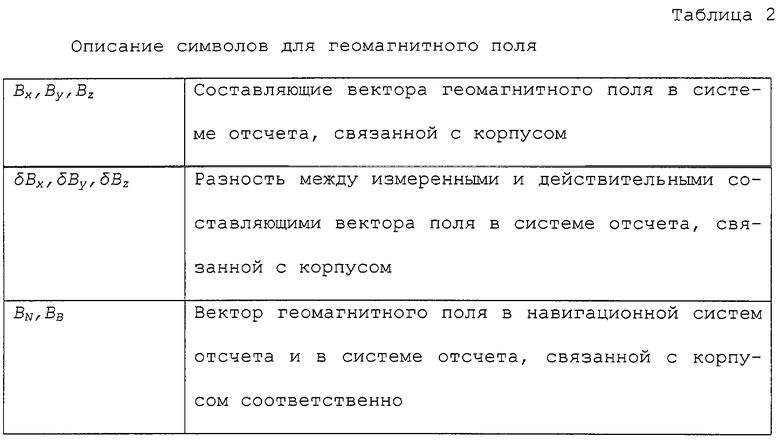
Вектор поля в системе отсчета относительно корпуса обозначен здесь как ВB, а вектор поля в навигационной системе отсчета - как ВN. Кроме того, три составляющие вектора поля обозначены в соответствии с выражением

С помощью матрицы преобразования С

где С
Матрица преобразования С
Разность между измеренным вектором поля и вычисленным в соответствии с данной моделью вектором поля составит

где δ обозначает разность между измеренной и вычисленной величинами. Левая часть уравнения (9) становится выходным сигналом из первого средства 10 измерения, а, значит, входным сигналом для фильтра 11 Калмана. Кроме того, правая часть уравнения (9) используется в фильтре 11 Калмана, что видно из приведенного ниже описания первого фильтра 11 Калмана.
Первый фильтр 11 Калмана
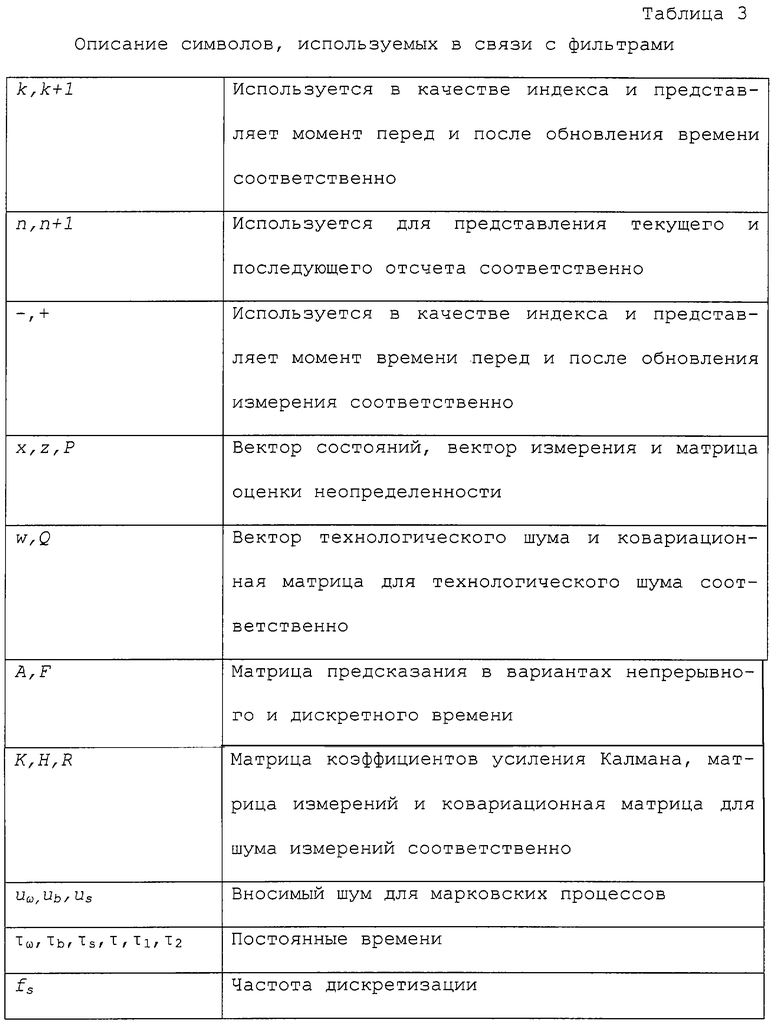
При заданной модели состояний

zk=Hkxk+ek,
фильтр Калмана функционирует следующим образом.
Обновление времени
где P
Обновление измерения:
где Р
Ошибки в составляющих вектора поля моделируются согласно выражению
где b - смещения, s - ошибки масштабных коэффициентов, а k - перекрестная связь одной составляющей с другой (например, индекс ху указывает, что составляющая у действует на составляющую х). Эти 12 ошибок могут представлять состояния в первом фильтре 11 Калмана согласно выражению

а каждое из уравнений состояния выглядит как

где индекс k отражает дискретный прямой отсчет во времени.
В уравнении (15) wk обозначает технологический шум с понедельным дискретным изменением для моделирования определенного дрейфа в ошибках.
Уравнение (15) означает, что матрица предсказания становится единичной матрицей, а ковариационная матрица для технологического шума будет представлять собой единичную матрицу, умноженную на σ
Применительно к обновлению измерения для фильтра 11 Калмана используется уравнение (9), и матрица измерений выглядит следующим образом:

Из-за помех, не учтенных при моделировании, измеренный вектор геомагнитного поля будет отклоняться от рассчитанного по модели как по направлению, так и по модулю. Простейший вариант моделирования этих помех - введение в модель постоянного белого шума измерений с помощью ковариационной матрицы Rk шума измерений. Каждое из стандартных отклонений для шума измерений для измерений трех составляющих вектора поля устанавливается равным одной десятой (безразмерная величина, поскольку перед использованием составляющие вектора поля нормируются к 1).
Чтобы избежать влияния некачественных измерений, используется тест Chi2. Вдобавок, измерения составляющих вектора поля не используются, если угловые скорости слишком велики. Причина этого состоит в том, что при высоких угловых скоростях сказываются различные временные задержки.
Средство 20 интегрирования
Можно показать, что производная по времени матрицы С

В уравнении (17) WIB и WIN представляют собой соответственно вращение В (система отсчета относительно корпуса) относительно I (инерциальная система отсчета) и вращение N (навигационная система отсчета) относительно I. Обе системы записаны в матричной форме. Поскольку нас интересует резервное пространственное положение и резервный курс, где требования к ошибкам пространственного положения составляют величину порядка степени 2, пока элементы в WIN имеют порядок 0,01, WIN можно пренебречь. Тогда выражение (17) будет иметь вид

где WIB - сигналы гироскопов угловых скоростей, поступающие от гироскопов угловых скоростей системы управления. В принципе, уравнение (18) подразумевает наличие девяти дифференциальных уравнений. В силу ортогональности необходимо интегрировать только шесть из них, а три других могут быть решены с использованием векторного произведения.
Второе средство 21 измерения
Второе средство 21 измерения представляет собой усовершенствованное первое средство 11 измерения, при этом дополнительное отличие состоит в вычислении углов крена и тангажа с помощью данных, содержащихся в аэродинамических данных (высота и скорость), и информации от датчиков силы скольжения (угол атаки и угол бокового скольжения).
В первом средстве 11 измерения предполагается, что неточными являются только составляющие вектора поля, а пространственное положение и курс определены точно. Это предположение является резонным, поскольку составляющие вектора поля определяются с помощью пространственного положения и курса, полученных от ИНС. Во втором средстве 21 измерения это условие не удовлетворяется, и необходимо учитывать ошибки пространственного положения и курса. Оцененные в подсистеме А ошибки вектора поля, которые используются во втором средстве измерения, компенсируются.
Ошибки в векторе поля и матрице преобразования означают, что

где  устанавливается для вычисленной матрицы преобразования и означает, что
устанавливается для вычисленной матрицы преобразования и означает, что


При использовании уравнения (20), формировании разности между измеренным и вычисленным вектором поля и пренебрежении произведениями ошибок получим

Во втором средстве 21 измерения углы крена и тангажа вычисляются с помощью высоты, скорости, угла атаки и угла бокового скольжения. Угол тангажа может быть вычислен согласно выражению

Чтобы иметь возможность вычисления угла тангажа согласно выражению (22), необходимо иметь производную высоты. Эту производную высоты непосредственно получить невозможно и поэтому ее необходимо вычислить на основе имеющейся высоты, полученной из аэродинамических данных. Вычисление производится согласно формуле

т.е. выполняется высокочастотная фильтрация высоты. Символы τ и fs в уравнении (23) представляют собой соответственно постоянную времени фильтрации и частоту дискретизации. Скорость v, используемая в уравнении (22), примерно равна vt (истинная скорость относительно воздуха). Здесь подразумевается, что при вычислении vt измеренная температура не используется, что является стандартным случаем, а вместо этого используется так называемое стандартное распределение температуры.
Затем может быть вычислен угол крена согласно выражению
Выражение (24) применимо только для малых углов крена и тангажа, малых угловых скоростей, и, кроме того, когда малы углы атаки и бокового скольжения.
Производятся вычисления по двум выше приведенным выражениям, и выполняется сравнение с пространственным положением, вычисленным средством интегрирования, путем формирования разности согласно выражению
Второй фильтр 22 Калмана
Можно сказать, что второй фильтр 22 Калмана является сердцем системы. В нем оцениваются ошибки пространственного положения и курса, которые возрастают в процессе интегрирования сигналов гироскопов угловых скоростей, поступающих из системы управления полетом. Также оцениваются ошибки установки нуля в составляющих вектора поля сигналов гироскопов угловых скоростей. Кроме того, здесь оцениваются возможные остаточные ошибки в составляющих вектора поля, т.е. ошибки, на которые первый фильтр 11 Калмана не может повлиять. Все вместе это означает, что имеется девять состояний: три для ошибок пространственного положения и курса, три - для ошибок установки нуля в сигналах гироскопов угловых скоростей и три - для остаточных ошибок составляющих вектора поля (три ошибки установки нуля). Ошибки пространственного положения и курса представляются путем поворота системы отсчета относительно корпуса от вычисленной системы координат к истинной системе координат.
Ошибка в  может быть записана в виде
может быть записана в виде

Можно убедиться, что
где Г - матричная форма γ =[γ х, γ у, γ z]T, a I - единичная матрица (Т обозначает транспонирование). Элементы вектора γ описывают малый поворот вокруг соответствующей оси между действительной (истинной) и вычисленной системой отсчета, связанной с корпусом. Соответствующие дифференциальные уравнения для элементов γ могут быть получены в виде
где δ ω - ошибки в угловых скоростях от гироскопов угловых скоростей.
Ошибки в угловых скоростях моделируются в виде трех марковских процессов первого порядка согласно выражению
где постоянная времени τ ω обычно устанавливается равной нескольким часам, а значения для трех uω обычно устанавливают меньшими одного градуса в секунду.
Остаточные ошибки в составляющих вектора поля (ошибки установки нуля) моделируются аналогичным образом
где τ b обычно устанавливают равной нескольким часам, а значение ub обычно устанавливают равным нескольким сотым (безразмерная величина, поскольку перед использованием составляющие вектора поля нормируются к 1).
Это дает вектор состояния согласно выражению

и матрицу предсказания согласно выражению

где А(τ ) - матрица, описанная уравнениями с непрерывными состояниями, приведенными выше. Ковариационная матрица для технологического шума Qk устанавливается равной диагональной матрице. Среди прочих в качестве диагональных элементов используются uω и ub. Что касается диагональных элементов, связанных с состояниями для ошибок пространственного положения и курса (первые три состояния), то в них включены воздействия ошибок масштабных коэффициентов в гироскопах угловых скоростей. Эти ошибки масштабных коэффициентов составляют обычно порядка 2% и могут вызвать большие ошибки в интегральных значениях пространственного положения и курса при больших угловых скоростях.
Выполняется пять измерений: три для получаемых составляющих вектора поля, а также для углов крена и тангажа, вычисляемых из аэродинамических данных. Результаты этих измерений получают с использованием соотношений (21) и (25).
Что касается матрицы Нk измерений, то соотношение (21) используется для заполнения трех верхних строк. В результате три верхних строки этой матрицы будут выглядеть следующим образом:

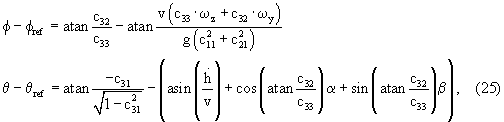
Для последних двух строк Hk используется уравнение (25) путем дифференцирования двух правых частей применительно ко всем состояниям второго фильтра Калмана. В результате в последних двух строках получаются следующие элементы (индекс обозначает строку и столбец в указанном порядке):
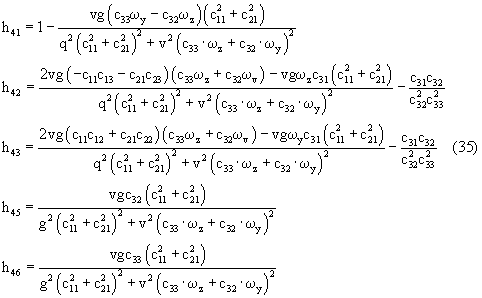
и
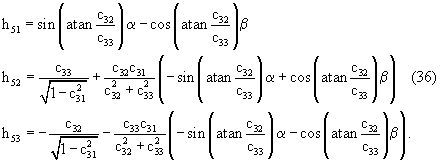
Остальные элементы в четвертой и пятой строках равны нулю.
Простейшим вариантом ковариационной матрицы для шума Rk измерений является диагональная матрица. Первые четыре элемента шума измерений имеют стандартное отклонение, которое обычно устанавливается равным одной десятой. С другой стороны, пятый элемент шума измерений имеет стандартное отклонение, которое устанавливают как функцию от производной высоты и скорости. Эта функция представляет собой просто масштабированную сумму из выражения для вычисления угла тангажа и в соответствии с уравнением (25) продифференцированную применительно к производной высоты и скорости. Эта функция устанавливается в виде

и определяет меру чувствительности вычисления угла тангажа к ошибкам в производной высоты и скорости.
Поскольку ошибки в пространственном положении и курсе, вычисляемые с помощью процедуры интегрирования, быстро возрастают, расчетные ошибки пространственного положения и курса необходимо подать обратно в процедуру интегрирования, что выполняется через проводное соединение 17. Если этого не сделать, то уравнения ошибок во втором фильтре Калмана скоро станут недействительными по той причине, что они являются существенно нелинейными. Вдобавок, через проводное соединение 18 подаются обратно оценки ошибок установки нуля в гироскопах угловых скоростей. Это приводит к лучшей линеаризации второго фильтра 22 Калмана и, кроме того, появляется возможность не повышать частоту дискретизации.
В некоторых ситуациях, возникающих в полете, точность вычислений, выполняемых во втором средстве 21 измерения, оказывается очень низкой либо в силу того, что уравнения измерений недостаточно согласованы, либо из-за того, что данные измерений по своей сути мало информационны. Вычисление угла крена на основе аэродинамических данных используется только при горизонтальном полете. Измерение не используется, если угловые скорости недостаточно малы - обычно около двух градусов в секунду. Также проверяется вычеты измерений; не допускается, чтобы эти вычеты превышали соответствующую оценку неопределенности, обычно в один - два раза.
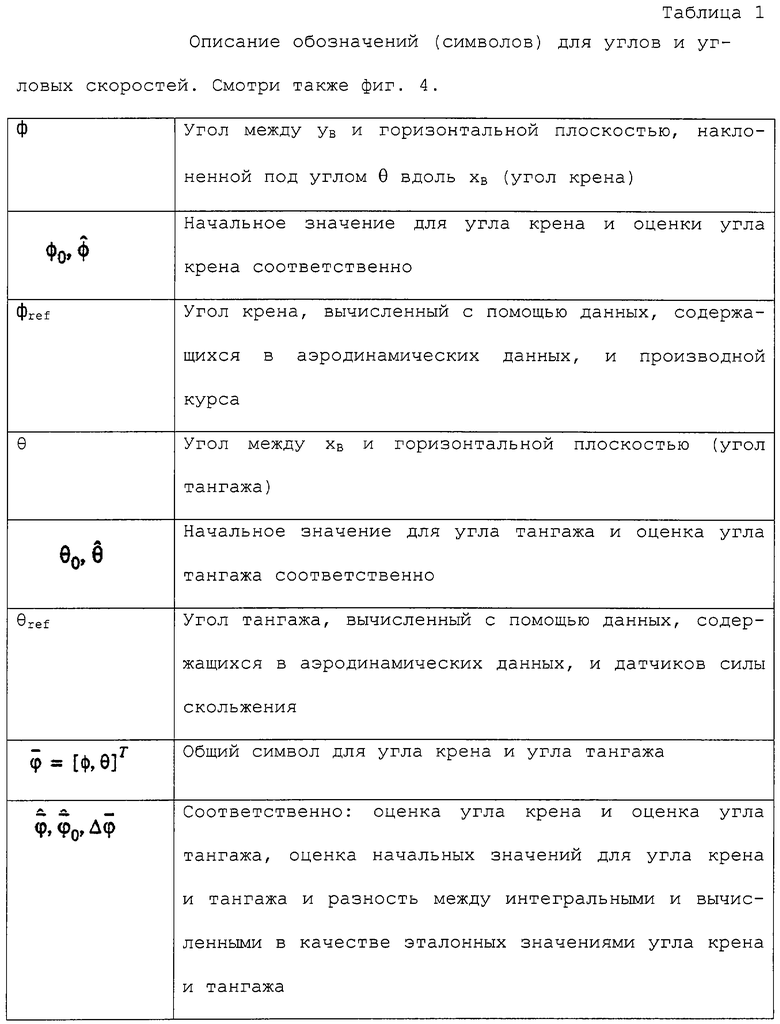
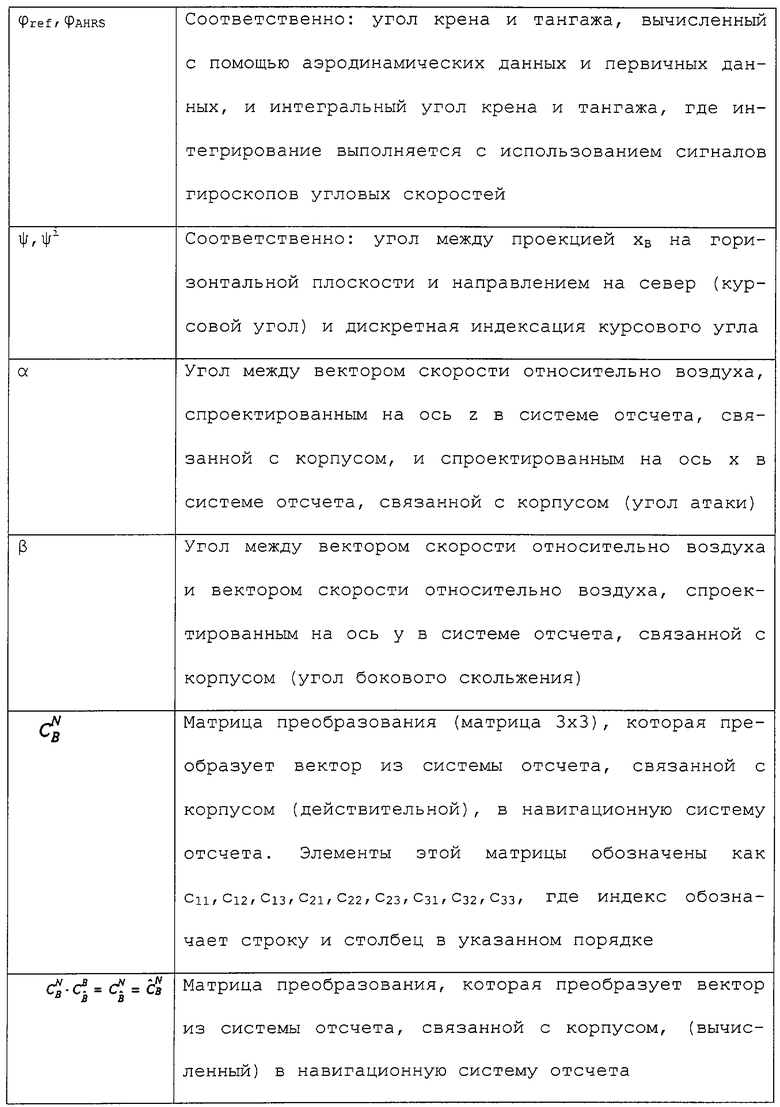
Символы
Системы координат
I (Инерциальная система отсчета): система относительно инерциального пространства.
При полете над поверхностью Земли центр этой системы обычно совпадает с центром Земли. В действительности это является некоторым приближением, поскольку система, зафиксированная в инерциальном пространстве, не должна поворачиваться. Поскольку Земля вращается вокруг Cолнца, I-система также будет поворачиваться. Однако возникающие при этом ошибки незначительны. С этой системой связаны ускорения и угловые скорости, измеряемые датчиками в инерциальной навигационной системе.
N (Навигационная система отсчета): система с центром на самолете, причем плоскость ху этой системы всегда параллельна поверхности Земли.
Ось х указывает на север, ось у на восток, а ось z направлена вертикально вниз к поверхности Земли.
В (Система отсчета, связанная с корпусом): система на самолете, закрепленная на системе отсчета, связанной с корпусом.
Эта система координат поворачивается вместе с самолетом. Ось х выходит через нос самолета, ось у проходит через правое крыло, а ось z идет относительно самолета вертикально вниз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЕТНОГО ЭКСПЕРИМЕНТА | 2022 |
|
RU2790358C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА И УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ФУНКЦИОНИРОВАНИЯ В ПОЛЯРНОЙ ОБЛАСТИ | 2018 |
|
RU2762143C2 |
| СПОСОБ ОБНОВЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, ОСНОВАННЫЙ НА ДЕВЯТИОСЕВОМ ДАТЧИКЕ НА ОСНОВЕ МЭМС | 2016 |
|
RU2662460C1 |
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |

Изобретение относится к области управления движением самолетов и предназначено для комплексного вычисления резервного пространственного положения и резервного курса с помощью имеющихся на самолете данных. Технический результат заключается в сокращении аппаратуры при создании резервной системы, отображающей пространственное положение самолета. В одном варианте изобретения курс самолета известен, а в другом варианте курс самолета вычисляется на основе данных от датчика магнитного курса. Когда курс известен (резервный курс), пространственное положение вычисляется путем взвешивания вместе сигналов от гироскопов угловых скоростей, входящих в систему управления полетом самолета, информации, содержащейся в аэродинамических данных, а также информации о курсе (резервный курс). Когда курс не известен, пространственное положение и курс вычисляются в одном варианте с помощью фильтров Калмана путем взвешивания вместе сигналов от гороскопов угловых скоростей, входящих в систему управления полетом самолета, информации, содержащейся в аэродинамических данных (высота, скорость, угол атаки и угол бокового скольжения), а также информации от датчика магнитного курса, имеющегося на самолете. 4 н. и 19 з.п.ф-лы, 5 ил., 4 табл.
| US 4914598 А, 03.04.1990 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО МАГНИТНОМУ ПОЛЮ ЗЕМЛИ | 1991 |
|
RU2020111C1 |
| US 5841537 А, 24.11.1998 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

