Изобретение относится к измерительной технике, применяемой в области бурения и эксплуатации скважин, и может быть использовано при измерении длины и скорости перемещения колонны труб при спускоподъемных операциях, в частности для определения скорости бурения и положения геофизического оборудования, доставляемого в интервал исследования колонной труб.
Известен способ исследования горизонтальных скважин, описанный в патенте РФ №2244824, МПК Е21В 47/00. Способ включает спуск в скважину до участка интенсивного искривления ствола скважины защитного контейнера, закрепленного на конце бурильных труб, спуск в защитный контейнер на нижнем отрезке каротажного кабеля геофизического прибора, доставку защитного контейнера с геофизическим прибором на забой скважины путем последовательного наращивания колонны бурильных труб, спуск через закрепленный на отводе вертлюга дистанционно-управляемый уплотнитель каротажного кабеля внутрь бурильных труб верхнего отрезка каротажного кабеля до электрического соединения со свободным концом нижнего отрезка каротажного кабеля посредством соединительной муфты, геофизические исследования ствола скважины при подъеме геофизического прибора вместе с бурильными трубами с соответствующим разъединением/соединением стыковочных концов нижнего и верхнего отрезков каротажного кабеля при отвинчивании каждой очередной свечи. В силу того, что к геофизическому прибору, расположенному в защитном контейнере, прикреплен каротажный кабель, контроль положения геофизического прибора и, соответственно, скорость перемещения колонны труб определяются по скорости перемещения каротажного кабеля на поверхности. Недостатком способа является высокая трудоемкость, связанная с необходимостью каждый раз при свинчивании/отвинчивании очередной свечи проводить разъединение и соединение стыковочных концов нижнего и верхнего отрезков каротажного кабеля.
Известен способ измерения глубины скважины в процессе бурения, описанный в патенте РФ №2272130, МПК Е21В 47/04, в котором на забое размещают источник импульсов колебаний среды, которым является управляемый клапан, посредством которого перекрывают проходное сечение бурильных труб и генерируют импульсы давления буровой жидкости, являющейся средой распространения колебаний. В качестве приемника импульсов колебаний среды используют два идентичных датчика давления, размещенных на устье скважины и разнесенных вдоль оси трубопровода не менее чем на 10-20 м. Определяют время распространения импульсов давления до каждого датчика давления. Расстояние до источника импульсов колебаний определяют по математическому выражению, учитывая время распространения импульса давления от управляемого клапана до каждого из датчиков давления, расстояние между датчиками давления, расстояние от первого датчика давления до стола ротора. Очевидно, что, располагая на конце бурильных труб необходимое оборудование, в том числе геофизическое, и зная расстояние, на котором это оборудование расположено от управляемого клапана, измеряя во времени расстояние от стола ротора до управляемого клапана, можно вычислить текущее положение оборудования в скважине. Недостатком способа является необходимость поддержания в бурильных трубах потока бурового раствора, перекрытие которого управляемым клапаном и генерирует импульс давления буровой жидкости. Кроме этого для реализации способа необходимо присутствие в компоновке труб управляемого клапана, имеющего ограниченный ресурс работы и требующего для поддержания своей работоспособности внешней энергии.
Известно устройство для измерения скорости бурения, описанное в патенте РФ 2190763, МПК Е21В 45/00. Устройство содержит первичный преобразователь поступательного движения во вращательное, состоящий из колеса, прижатого к тросу крепления гирлянды, и диска с чередующимися металлическими и неметаллическими секторами, два индуктивных выключателя положения, вычислительный блок прерывания измерений и блок индикации. При движении троса, связанного с буровым инструментом, происходит вращение колеса и диска, металлические сектора диска попадают в зоны действия индуктивных выключателей положения, сигналы о срабатывании которых поступают в вычислительный блок, выполняющий подсчет сигналов и вычисление текущего значения глубины.
Недостатком устройства является отсутствие информации о «холостых», не связанных с буровым инструментом перемещениях троса. Например, перемещения талевого блока, подвешенного на тросе, за следующей свечой не отличаются от «полезных» перемещений. Применение подобной системы при геофизических исследованиях накладывает отпечаток мобильности монтажа при достаточном многообразии буровых. Очевидно неудобство монтажа предложенного устройства - расположение на рабочей площадке буровой бригады мешает последней проведению работ, монтаж наверху связан с проведением высотных работ и с соответствующими трудностями.
Известно устройство для измерения длины колонны труб, описанное в патенте РФ 2215140, МПК Е21В 47/04. Устройство содержит кронблок, талевый блок и электромагнитную муфту, установленную с возможностью передачи вращательного движения на счетчик. «Мертвый» конец талевого блока связан с индикатором веса. Электромагнитная муфта установлена на валу кронблока с возможностью вращения. Средство передачи крутящего момента электромагнитной муфты на счетчик выполнено в виде герконов, по меньшей мере, трех, установленных с возможностью взаимодействия с постоянным магнитом, размещенным на корпусе электромагнитной муфты. Счетчик выполнен на электронной основе с выводом показаний длины колонны в метрах. Электромагнитная муфта может быть заключена в кожух, герконы могут быть установлены на кожухе. Недостатком устройства является большая трудоемкость его монтажа на валу кронблока и «мертвом» конце талевого блока ввиду большой разнообразности буровых установок и необходимости проведения монтажных работ на высоте.
Наиболее близким техническим решением к предлагаемому является способ, описанный в патенте РФ №2187638, МПК Е21В 47/04.
В этом способе измерение длины колонны длинномерных тел, соединяемых между собой и спускаемых в скважину канатной лебедкой, снабженной измерителем веса, производят с учетом ее удлинения под собственным весом, а в процессе измерения длины осуществляют циклический подсчет оборотов, фрикционно связанных с канатом лебедки мерных роликов, начиная с первого длинномерного тела, спускаемого в скважину без учета его веса, последующий счет циклов ведут при наличии нагрузки на канате лебедки, равной весу не менее чем двух длинномерных тел, соединяемых в колонну, а съем показаний осуществляют, по крайней мере, с двух мерных роликов, причем в каждом цикле засчитывают показания мерного ролика, завершившего оборот первым.
Наиболее близким к предлагаемому устройству является устройство, описанное в патенте РФ №2187638, МПК Е21В 47/04. Это устройство включает канатную лебедку, снабженную измерителем веса, фрикционно связанным с канатом лебедки мерных роликов.
Недостатком способа и устройства, описанного в прототипе, является то, что при фрикционной передаче перемещения кабеля по мерным роликам возникает проскальзывание (особенно в зимнее время), что существенно влияет на точность измерений. Кроме того, установка мерных роликов на оборудовании и прокладка отходящих от них кабелей является трудоемкой операцией, требующей больших затрат времени.
Задачей предлагаемого способа и устройства для его осуществления является снижение трудоемкости при измерении длины и скорости перемещения колонны труб при проведении спускоподъемных операций.
Техническим результатом реализации способа и устройства для его осуществления является ускорение процесса измерения длины и скорости перемещения колонны труб при проведении спускоподъемных операций.
Технический результат в способе достигается за счет того, что колонну труб, соединяемых между собой, спускают в скважину канатной лебедкой, снабженной измерителем веса на талевом блоке, определяют холостые пробеги талевого блока по показаниям измерителя веса, и при этом по новому определяют перемещения колонны во времени и пространстве. Перемещения колонны фиксируют по перемещению мишени с помощью видеокамеры, закрепленной на талевом блоке канатной лебедки, с возможностью одновременного обзора верхнего и нижнего положения мишени при перемещении колонны труб, мишень поочередно располагают в нижнем и верхнем положениях, эти положения фиксируют видеокамерой, произведенное перемещение измеряют в единицах длины, находят координаты положения центра мишени в нижнем и верхнем положениях, определяют числовой масштаб между размерами на экране и в реальности, дальнейшее измерение перемещения колонны труб производят по измерению перемещения центра мишени талевого блока по экрану с учетом числового масштаба, после каждого перемещения суммируют линейные перемещения с учетом холостых пробегов, и по линейному перемещению мишени в единицу времени рассчитывают текущую скорость перемещения.
Технический результат в устройстве, содержащем устройство видеонаблюдения и канатную лебедку, снабженную измерителем веса, на талевом блоке которой установлена мишень, дополнительно выход измерителя веса соединен с входом подсистемы ввода/вывода, выход которой соединен с первым входом процессора, второй вход которого соединен с выходом подсистемы ввода видеоизображения, вход-выход соединен через стандартный интерфейс связи с входом-выходом блока передачи данных, а выход соединен со входом подсистемы управления и синхронизации, выход которой соединен с входом устройства видеонаблюдения, выход которого соединен с входом видеоинтерфейса, выход которого соединен с первым входом интерфейса связи, а выход соединен с входом подсистемы ввода изображения.
Новым по отношению к прототипу в способе является то, что колонна труб, соединяемых между собой, спускается в скважину канатной лебедкой, снабженной измерителем веса на талевом блоке, определяются холостые пробеги талевого блока по показаниям измерителя веса, при этом вводят новые действия: перемещение колонны во времени и пространстве фиксируют видеокамерой по перемещению мишени, закрепленной на талевом блоке канатной лебедки, с возможностью одновременного обзора верхнего и нижнего положения мишени при перемещении колонны труб, мишень поочередно располагают в нижнем и верхнем положениях, эти положения фиксируют видеокамерой, произведенное перемещение измеряют в единицах длины, находят координаты положения центра мишени в нижнем и верхнем положениях, определяют числовой масштаб между размерами на экране и в реальности, дальнейшее измерение перемещения колонны труб производят по измерению перемещения центра мишени талевого блока по экрану с учетом числового масштаба, после каждого перемещения суммируют линейные перемещения с учетом холостых пробегов, и по линейному перемещению мишени в единицу времени рассчитывают текущую скорость перемещения колонны длинномерных тел.
Новым по отношению к прототипу в устройстве для измерения длины и скорости перемещения колонны труб при спускоподъемных операциях, содержащем устройство видеонаблюдения и канатную лебедку, снабженную измерителем веса, на талевом блоке которой установлена мишень, является то, что выход измерителя веса соединен с входом подсистемы ввода/вывода, выход которой соединен с первым входом процессора, второй вход которого соединен с выходом подсистемы ввода видеоизображения, вход-выход соединен через стандартный интерфейс связи со входом-выходом блока передачи данных, а выход соединен со входом подсистемы управления и синхронизации, выход которой соединен со входом устройства видеонаблюдения, выход которого соединен со входом видеоинтерфейса, выход которого соединен с первым входом интерфейса связи, а выход соединен со входом подсистемы ввода изображения.
Проведенные исследования известных в науке и технике решений показали, что идентичных решений нет.
Все вышесказанное свидетельствует о том, что заявленное изобретение является новым, соответствует критерию изобретательский уровень и применимо при исследованиях скважин.
Техническая сущность изобретения поясняется чертежами, где:
на фигуре 1 изображено устройство, реализующее способ измерения длины и скорости перемещения колонны труб, спускаемых в скважину;
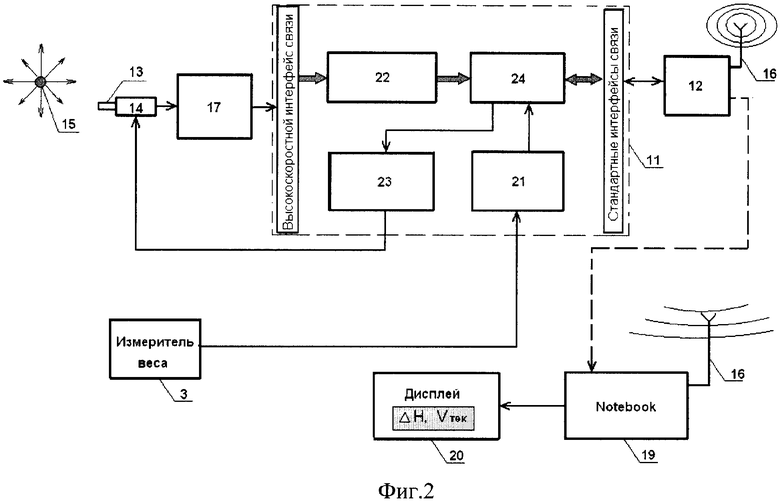
на фигуре 2 изображена блок-схема устройства.
Скважина оборудована канатной лебедкой 1, на канате 2 которой имеется измеритель веса 3, а на талевом блоке 4 имеется мишень 15. На талевом блоке 4 с помощью элеватора 5 с клиновым захватом спайдера 6, через стол ротора 7 или любым другим способом в скважину 9 опускается и поднимается колонна труб 8. На расстоянии L от мишени 15 на штативе 10 установлено устройство видеонаблюдения, видеокамера 14, с трансфокатором 13, интерфейсом и блоком обработки видеоинформации 11, информация с которых попадает на антенну 16, ноутбук 19 и далее на дисплей 20 пульта буровика-оператора. Видеокамера 14 имеет максимальный угол фиксации 18 перемещения колонны труб 8, который обеспечивает видеонаблюдение за перемещениями колонны труб 8 из положения с минимальным расстоянием от стола ротора 7 Hmin до мишени 14, до положения с максимальным расстоянием от стола ротора 7 Hmax до мишени 14 и обратно. Выход измерителя веса 3 соединен с входом подсистемы ввода/вывода 21, выход которой соединен с первым входом процессора 24, второй вход которого соединен с выходом подсистемы ввода видеоизображения 22, вход-выход соединен через стандартный интерфейс связи с входом-выходом блока передачи данных 12, а выход соединен со входом подсистемы управления и синхронизации 23, выход которой соединен со входом устройства видеонаблюдения, видеокамерой 14, выход которой соединен со входом видеоинтерфейса 17, выход которого соединен со входом интерфейса связи, а выход соединен со входом подсистемы ввода изображения 22.
Перед началом проведения измерений видеокамеру 14 устанавливают на штативе 10 на расстоянии L под таким углом  чтобы перемещение мишени от максимального верхнего до минимального нижнего положения полностью отображалась в пределах экранной области, одновременно с установкой видеокамеры трансфокатором 13 настраивают максимально возможную яркость и контрастность изображения мишени, при этом определяют числовой масштаб измерений, для этого лазерной рулеткой, типа DISTO plus5, имеющей точность измерения (±1,5 мм на 100 м), калибруется положение мишени 15 на талевом блоке 4 в точках: Hmax и Hmin, эти положения соотносятся с образами положения мишени 4 на экране видеокамеры 14, таким образом рассчитывается числовой масштаб.
чтобы перемещение мишени от максимального верхнего до минимального нижнего положения полностью отображалась в пределах экранной области, одновременно с установкой видеокамеры трансфокатором 13 настраивают максимально возможную яркость и контрастность изображения мишени, при этом определяют числовой масштаб измерений, для этого лазерной рулеткой, типа DISTO plus5, имеющей точность измерения (±1,5 мм на 100 м), калибруется положение мишени 15 на талевом блоке 4 в точках: Hmax и Hmin, эти положения соотносятся с образами положения мишени 4 на экране видеокамеры 14, таким образом рассчитывается числовой масштаб.
где  - максимальный угол, фиксируемый видеокамерой;
- максимальный угол, фиксируемый видеокамерой;
L - расстояние по горизонтали от мишени до видеокамеры.
где Kν - числовой масштаб преобразования из физического перемещения мишени в единицах длины в экранное представление (в пикселях),
Nmax, Nmin - номер строки на экране видеокамеры (в пикселях), соответственно в верхнем и нижнем положениях мишени.
Измерение длины и скорости перемещения колонны труб 8 производится следующим образом. Колонна труб 8, соединяемых между собой и спускаемых в скважину 9 канатной лебедкой 1, снабженной измерителем веса 3 на канате 2 талевого блока 4, с помощью элеватора 5 с клиновым захватом спайдера 6, через стол ротора 7 или любым другим способом спускается в скважину 9 и поднимается из нее. Холостые пробеги талевого блока 4 определяются по показаниям измерителя веса 3. Перемещение колонны 8 во времени и пространстве фиксируют видеокамерой 14, по перемещению мишени 15, закрепленной на талевом блоке 4 канатной лебедки 1. Видеокамера 14 установлена на расстоянии L от мишени 15, на штативе 10, и имеет возможность одновременного обзора верхнего и нижнего положения мишени 15, при максимальном угле фиксации перемещения колонны труб 8. Видеокамера 14 фиксирует положение мишени 15 на талевом блоке 4 и с высокой скоростью по интерфейсу 17, например IEEE-1394, передает полученное изображение в блок обработки информации 11. В зависимости от величины сигнала измерителя веса 3, поступающего в блок обработки видеоинформации 11 через подсистему ввода/вывода 21 на вход процессора обработки 24, если измеренный вес не превышает веса ненагруженного талевого блока, текущее перемещение мишени 15 считается холостым пробегом, при этом процессор видеообработки 24 посылает сигнал управления через подсистему управления и синхронизации 23 на видеокамеру 14 и информация не фиксируется видеокамерой 14. При появлении сигнала веса, превышающего вес ненагруженного талевого блока 4, подается сигнал управления на продолжение измерений, поступающий от подсистемы ввода видеоизображения 22. Видеоинформация программным образом фильтруется и корректируется процессором видеообработки 24, преобразованная таким образом информация блоком передачи данных 12 по стандартному интерфейсу RS-232, USB 2.0 или/и по радиоканалу 16 передается в компьютер 19, где в реальном масштабе времени программой распознавания образов выделяется центр мишени 15, рассчитываются ее координаты и скорость перемещения, а данные, перемещение - ΔН и текущая скорость V отображаются на дисплее 20.
где
ΔН - текущее перемещение мишени талевого блока относительно стола ротора;
Hmin - минимальное расстояние положения мишени талевого блока относительно стола ротора;
Hmax - максимальное расстояние положения мишени талевого блока относительно стола ротора;
x - координата положения мишени талевого блока по оси абсцисс экранной области;
y - координата положения мишени талевого блока по оси ординат экранной области;
x1, y1 - координата положения мишени талевого блока в экранной области на минимальном расстоянии расположения мишени талевого блока относительно стола ротора;
x2, y2 - координата положения мишени талевого блока в экранной области на максимальном расстоянии расположения мишени талевого блока относительно стола ротора;
ΔН - текущее перемещение мишени талевого блока относительно стола ротора;
Δx - текущее изменение координаты мишени талевого блока по оси абсцисс в экранной области;
Δy - текущее изменение координаты мишени талевого блока по оси ординат в экранной области.
После каждого перемещения суммируют линейные перемещения с учетом холостых пробегов.
По линейному перемещению мишени в единицу времени рассчитывают текущую скорость перемещения колонны труб по следующей зависимости.
Vтек=ΔH×τ,
где ΔVтек - текущая скорость перемещения колонны труб;
τ - время.
Использование предлагаемого изобретения позволяет полностью исключить дополнительные операции, связанные с работой с мерными роликами, за счет чего снижается трудоемкость и повышается надежность определения длины и скорости при проведении спускоподъемных операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ КОЛОННЫ ТРУБ, СПУСКАЕМОЙ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714167C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ И ИХ ИДЕНТИФИКАЦИИ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2015 |
|
RU2593609C1 |
| Устройство определения длины и скорости колонны труб при проведении спускоподъемных операций на скважине | 2019 |
|
RU2692330C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ, СПУСКАЕМЫХ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2753907C1 |
| Устройство для контроля глубины спуска труб в скважину | 2001 |
|
RU2217590C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ДЛИННОМЕРНЫХ ТЕЛ, СОЕДИНЯЕМЫХ МЕЖДУ СОБОЙ И СПУСКАЕМЫХ В СКВАЖИНУ КАНАТНОЙ ЛЕБЕДКОЙ, СНАБЖЕННОЙ ИЗМЕРИТЕЛЕМ ВЕСА | 2000 |
|
RU2187638C2 |
| Способ определения глубины погружения скважинного оборудования на трубах | 2018 |
|
RU2699095C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВИДЕОНАБЛЮДЕНИЯ СКВАЖИНЫ | 2008 |
|
RU2375566C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ, СПУСКАЕМЫХ В СКВАЖИНУ | 2022 |
|
RU2801020C1 |
| Устройство для измерения длины колонны труб,спускаемых в скважину | 1984 |
|
SU1186790A2 |
Изобретение относится к измерительной технике, применяемой в области бурения и эксплуатации скважин, и может быть использовано при измерении длины и скорости перемещения колонны труб при спускоподъемных операциях, в частности для определения скорости бурения и положения геофизического оборудования, доставляемого в интервал исследования колонной труб. Техническим результатом является ускорение процесса измерения длины и скорости перемещения колонны труб при проведении спускоподъемных операций. Для этого колонну труб, соединяемых между собой, спускают в скважину канатной лебедкой, снабженной измерителем веса на талевом блоке, определяют холостые пробеги талевого блока по показаниям измерителя веса. При этом перемещения колонны во времени и пространстве фиксируют видеокамерой по перемещению мишени, закрепленной на талевом блоке канатной лебедки, с возможностью одновременного обзора верхнего и нижнего положения мишени при перемещении колонны, мишень поочередно располагают в нижнем и верхнем положениях. Эти положения фиксируют видеокамерой, произведенное перемещение измеряют в единицах длины. Затем находят координаты положения центра мишени в нижнем и верхнем положениях, определяют числовой масштаб между размерами на экране и в реальности. Дальнейшее измерение перемещения колонны труб производят по измерению перемещения центра мишени талевого блока по экрану с учетом числового масштаба, после каждого перемещения суммируют линейные перемещения с учетом холостых пробегов, и по линейному перемещению мишени в единицу времени рассчитывают текущую скорость перемещения. 2 н.п. ф-лы, 2 ил.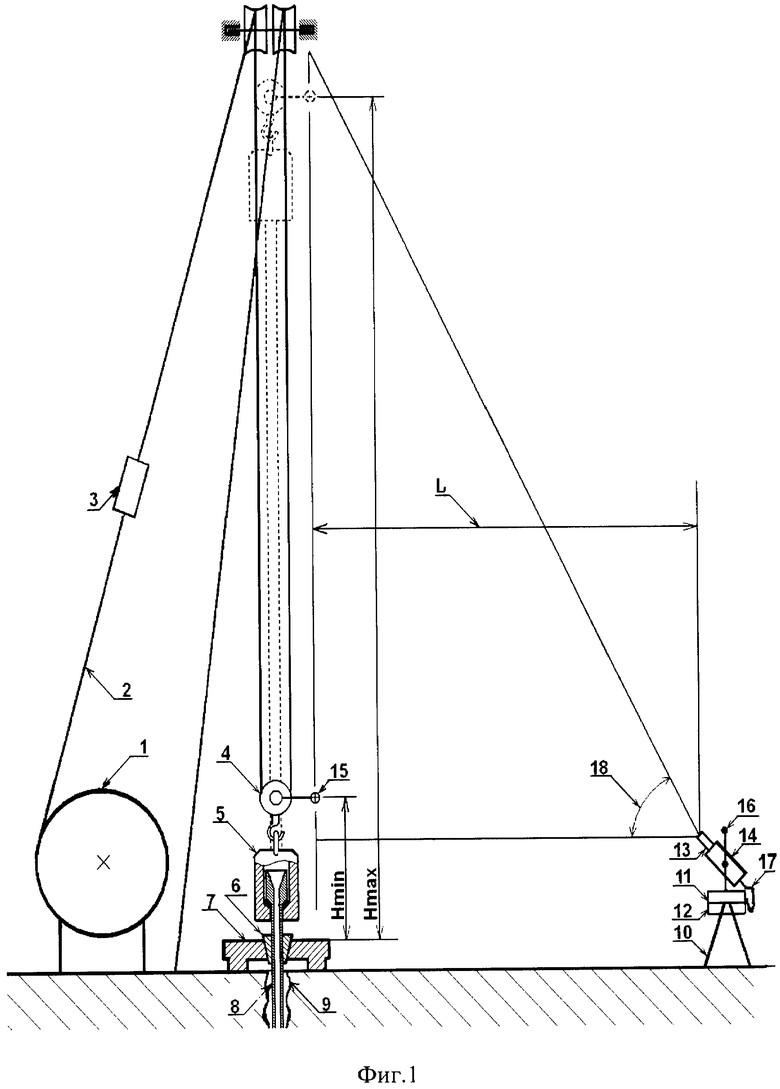
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ДЛИННОМЕРНЫХ ТЕЛ, СОЕДИНЯЕМЫХ МЕЖДУ СОБОЙ И СПУСКАЕМЫХ В СКВАЖИНУ КАНАТНОЙ ЛЕБЕДКОЙ, СНАБЖЕННОЙ ИЗМЕРИТЕЛЕМ ВЕСА | 2000 |
|
RU2187638C2 |
| Устройство оптимизации спуско-подъемных операций в бурении | 1987 |
|
SU1492030A1 |
| Устройство для измерения длины колонны труб,спускаемых в скважину | 1986 |
|
SU1382930A2 |
| Устройство для контроля глубины спуска труб в скважину | 2001 |
|
RU2217590C2 |
| US 4156467 A, 29.05.1979 | |||
| US 5019978 A, 28.05.1991. | |||

