Изобретение относится к нефтегазовой отрасли и может быть использовано для точного измерения глубины погружения рабочего инструмента в процессе проведения ремонтных и профилактических работ на нефтяных и газовых скважинах.
Известен «Способ измерения глубины при географических исследованиях нефтяных и газовых скважин (варианты)» (Патент РФ №2375568, опубл. 10.12.2009, Бюл. №34), при котором в зависимости от задачи исследований и вида скважины геофизический прибор спускают на кабеле либо на колонне труб или колтюбинге. С учетом скорости пробега импульса колебаний среды по гидравлическому каналу скважины или трубе и текущего времени его излучения и приема вычисляют глубину скважины. В процессе работы с геофизическим прибором на кабеле импульсы колебаний среды, принятые по гидравлическому каналу скважины от источника на устье, преобразуют посредством приемников и передают по каротажному кабелю к наземной системе регистрации. Однако совместное размещение на насосно-компрессорных трубах (НКТ) рабочего инструмента и геофизического прибора практически невозможно.
Известен «Способ определения глубины скважины с применением цилиндрической мерной базы» (Заявка на изобретение №2014119047/03 от 12.05.2014, опубл. 20.11.2015, Бюл. №32), основанный на применении цилиндрической мерной базы, в качестве которой используют непосредственно барабан лебедки с учетом намотанного на него количества слоев каротажного кабеля, и измеряют количество участков каротажного кабеля, прошедших через мерную базу в процессе опускания колонны НКТ в скважину.
Общими для перечисленных способов недостатками являются:
- ошибки измерения длины кабеля (каната) при спуске длинномерных тел (типа НКТ), соединяемых в колонну, связанные с непрерывностью процесса подсчета числа оборотов мерных роликов и невозможностью исключения из процесса измерения обязательных возвратно-поступательных движений НКТ при формировании трубной колонны;
- ошибки измерения, связанные с проскальзыванием кабеля на мерных базах из-за загрязнения его поверхности в процессе эксплуатации;
- ошибки измерения длины колонны, возникающие из-за увеличения длины колонны НКТ под воздействием собственного значительного веса и возможного температурного расширения (например, температура на рабочей площадке хранения НКТ зимой - 30 градусов Цельсия, а в глубине скважины до +50 градусов Цельсия).
Эти недостатки приводят к существенному ухудшению точности измерения длины колонны при спуске ее в скважину и в конечном счете не позволяют точно доставить закрепленное на нижнем конце колонны устройство (насос, нагреватель и т.п.) на заданную глубину.
Известен «Способ измерения длины колонны длинномерных тел, соединяемых между собой и спускаемых в скважину канатной лебедкой, снабженной измерителем веса», (Патент РФ №2187638, опубл. 20.08.2002, Бюл. №23).
Предложенный способ заключается в измерении длины колонны длинномерных тел по косвенному измерению линейного перемещения каната лебедки, фрикционно связанного с тремя мерными роликами, с последующим подсчетом циклов перемещений. Учет весового изменения длины колонны длинномерных тел осуществляется по данным дополнительного устройства измерения веса колонны. Недостатками данного способа являются следующие:
- измерение длины колонны НКТ осуществляется не непосредственно для объекта, а косвенно, по перемещению каната, на котором подвешивается и перемещается колонна, при этом невозможно полностью исключить влияние на величину измерения скольжение каната по мерным роликам, особенно в зимних условиях, растяжение каната под весом колонны;
- не учитывается температурное расширение колонны НКТ, которое при глубине погружения до 5000 м и перепаде температур порядка 80 градусов Цельсия может быть значительным;
- погрешность измерения веса колонны НКТ дополнительным устройством войдет в общую погрешность измерения.
Известны неконтактные способы измерения линейного размера длинномерных объектов с использованием оптических методов и устройств, например, «Способ измерения длины горячего проката» (Патент РФ №2362117, опубл. 20.07.2009, Бюл. №20), при котором измеряемую длину разбивают на ряд базовых участков и определяют положение конца проката с помощью фотоприемников, оптические оси которых проходят по границам базовых участков. Измерение внутри базовых участков производят посредством датчика импульсов с привода перемещения проката, при этом учитывают погрешность измерения, обусловленную проскальзыванием заготовки, и организуют процедуру диагностики работы измерителя.
Недостатком способа является необходимость наблюдения начала и конца объекта, что невозможно для соединенных в колонну НКТ и опущенных в скважину.
Известен «Способ растрового оптического измерения скорости объекта» (Патент РФ №2482499, опубл. 20.05.2013, Бюл. №14). Способ основан на формировании пространственной амплитудной модуляции света, отраженного от объекта, с помощью растра, расположенного между оптической системой и фотоприемниками, и детектировании модулированного света с помощью минимум четырех фотоприемников и минимум трех дифференциальных усилителей, по частоте результирующего выходного электрического сигнала с которых судят о скорости объекта. Способ требует установки измерительных элементов на движущемся объекте, что в случае колонны НКТ, невозможно. Тем не менее, измерение скорости движения объекта, в принципе, позволяет рассчитать величину линейного перемещения за известный промежуток времени.
Наиболее близким техническим решением к предлагаемому способу является «Способ измерения длины и скорости перемещения колонны труб при спускоподъемных операциях» (Патент РФ №2324812, опубл. 20.05.2008 бюл. №14), в котором колонну труб, соединяемых между собой, спускают в скважину канатной лебедкой, снабженной измерителем веса на талевом блоке, определяют холостые пробеги талевого блока по показаниям измерителя веса, определяют перемещения колонны во времени и пространстве с помощью видеокамеры по перемещению мишени, закрепленной на талевом блоке канатной лебедки, с возможностью одновременного обзора верхнего и нижнего положения мишени при перемещении колонны труб. Мишень поочередно располагают в нижнем и верхнем положениях, эти положения фиксируют видеокамерой, произведенное перемещение измеряют в единицах длины, находят координаты положения центра мишени в нижнем и верхнем положениях, определяют числовой масштаб между размерами на экране и в реальности, дальнейшее измерение перемещения колонны труб производят по измерению перемещения центра мишени талевого блока по экрану с учетом числового масштаба, после каждого перемещения суммируют линейные перемещения с учетом холостых пробегов, и по линейному перемещению мишени в единицу времени рассчитывают текущую скорость перемещения.
Недостатками данного способа являются следующие:
- измерение перемещения колонны труб осуществляется косвенно по перемещениям связанных с ней элементов спускоподъемного механизма, а именно мишени, закрепленной на талевом блоке, перемещения которой относительно колонны труб в пространстве вносят дополнительные ошибки в результат измерения при каждой спускоподъемной операции;
- измерительный блок, включающий видеокамеру, устанавливается на выносном штативе на значительном расстоянии L от платформы, обеспечивающем устойчивое наблюдение камерой мишени, закрепленной на талевом блоке как в самом верхнем ее положении, так и в самом нижнем, реально данное расстояние может составлять несколько десятков метров. При этом реализация измерений известным способом подвержена значительному влиянию возможных помех факторами внешней среды (дождь, снег, пыль, туман, плохая видимость в ночное время), положение штатива с устройством видеонаблюдения не должно находиться в зоне движения транспортных средств и персонала рабочей бригады;
- требуется точное предварительное измерение положения видеокамеры на штативе относительно верхнего и нижнего положений мишени, осуществляемое с помощью лазерной рулетки, что усложняет реализацию способа в реальных условиях эксплуатации
Перечисленные недостатки либо приводят к увеличению погрешности измерения, либо к срыву видеонаблюдения мишени, то есть к невозможности реализации операции измерения.
Известно «Устройство определения длины» (Патент РФ №2148789, опубл. 10.05.2000, Бюл. №13). Устройство содержит фотодатчик, блок обработки сигналов, оперативно-запоминающий блок, телевизионную камеру, коммутатор, постоянное запоминающее устройство, блок поиска, схему совпадений, счетно-решающий блок, индикатор, два RS-триггера, два элемента «И» и элемент «ИЛИ». Изобретение позволяет уменьшить энергопотребление, повысить чувствительность вплоть до работы в режиме счета отдельных фотонов, а также повысить точность измерений, но обладает рядом недостатков: - требуется горизонтальное положение измеряемого объекта; - нулевой датчик срабатывает от собственного излучения нагретой трубной заготовки. Эти недостатки делают невозможным применение устройства для измерения длинны вертикальной холодной колонны труб.
Известен «Оптический измеритель скорости, длины и направления движения» (Патент №2160450, опубл. 10.12.2000, Бюл. №34).
Устройство содержит оптический датчик и электронный блок. Датчик содержит передающий оптический канал, приемный оптический канал, оптический растр, образованный входными торцами волоконных световодов, и три фотоприемника. Электронный блок содержит два сумматора, измеритель фазы, измеритель частоты и вычислительное устройство.
Устройство работает следующим образом: передающий канал фокусирует излучение на поверхности контролируемого объекта, рассеянное отраженное излучение принимается приемным каналом и оптической системой, фокусируется на оптическом растре, с которого излучение передается на фотоприемник. Знак фазового сдвига, определяемый измерителем фазы, определяет направление движения объекта, а сигнал с фотоприемника, частота которого пропорциональна скорости движения объекта, подается на вход измерителя частоты. Вычислительное устройство по результатам измерения частоты и фазового сдвига определяет текущее значение скорости, длины и направление движения объекта.
Недостаток: Устройство требует закрытого помещения, поскольку воздействие природных факторов (дождь, снег, пыль и т.д.) существенно влияет на рассеивание отраженного сигнала, меняя фазовый сдвиг, что не позволяет применять его на открытых площадках.
Наиболее близким к предлагаемому устройству является устройство для осуществления способа измерения длины и скорости перемещения колонны труб при спускоподъемных операциях, (Патент №2324812, опубл. 20.05.2008, Бюл. №14). Устройство содержит блок видеонаблюдения и канатную лебедку, снабженную измерителем веса, на талевом блоке которой установлена мишень.
Недостатками данного устройства являются следующие:
измерение значительного углового перемещения мишени, закрепленной на талевом блоке, является сложной технической задачей, требует применения сложного устройства трансфокатора объектива и специального управления видеокамерой по углу наблюдения, что вносит дополнительные ошибки в результат измерения при каждой спускоподъемной операции;
- появление помех на линии наблюдения мишени (осадки, пыль, рабочий персонал и техника) может сорвать процесс измерения или внести дополнительные ошибки в результат измерения;
- наблюдение мишени в темное время суток требует ее подсветки.
Указанные недостатки либо приводят к увеличению погрешности измерения, либо к срыву видеонаблюдения мишени, то есть к невозможности реализации операции измерения.
Перечисленные неконтактные способы и устройства измерения линейного размера длинномерных объектов с использованием оптических устройств, несмотря на их недостатки, показывают принципиальную возможность их применения для высокоточного измерения длины колонны НКТ.
Задачей изобретения является создание бесконтактного устойчивого способа измерения технологических параметров колонны длинномерных тел и устройства для его осуществления.
Техническим результатом является повышение точности измерения текущей глубины погружения рабочего инструмента, измерение скорости и ускорения перемещения колонны труб при проведении спускоподъемных операций, количества труб в колонне.
Технический результат достигается тем, в способе измерения технологических параметров колонны труб спускаемой в скважину, содержащий спуск колонны труб в скважину канатной лебедкой, установленной с возможностью возвратно-поступательного движения и снабженной измерителем веса на талевом блоке, предварительно устанавливают блок видеоизмерения в непосредственной близости от колонны труб и закрепляют на платформе таким образом, чтобы объект был в зоне визуального контроля (на линии визирования объектива), формируют последовательность видеокадров наблюдаемых фрагментов движущейся колонны через равные промежутки времени, выделяют на видеокадрах рельефные контрастные точки, определяют величины перемещения этих точек через равные промежутки времени формирования видеокадров, по линейному перемещению которых от видеокадра к видеокадру рассчитывают скорость, ускорение движения колонны труб и величину ее вертикального перемещения, фиксируют число соединений труб и определяют их количество в колонне, уменьшение погрешности измерения осуществляют усреднением перемещения нескольких независимых наборов рельефных контрастных точек, измеряют вес колонны труб и корректируют ее конечную длину на величину линейного растяжения труб.
Введение в способ новых существенных признаков позволяет достигнуть технического результата за счет возможности формировать последовательную серию фотоизображений фрагментов (кадров) движущегося объекта, выделять на них рельефные контрастные точки, определять величины перемещения этих точек через равные промежутки времени формирования видеокадров, уменьшать погрешность измерения путем усреднения перемещения по контролируемым точкам на интервале времени измерения, суммировать измеренные усредненные перемещения на интервале времени от начала перемещения объекта до его конечной остановки.
Технический результат достигается тем, что в устройство для измерения технических параметров колонны труб, спускаемой в скважину, содержащее канатную лебедку, снабженную измерителем веса, на которой установлен талевый блок с элеватором для захвата и подъема труб, соединяемых в колонну, внешний ноутбук и радиочастотный канал дополнительно введены блок видеоизмерения, внешний индикатор с пультом управления и внешний источник питания, причем блок видеоизмерения содержит последовательно соединенные варифокальный объектив, цифровую видеокамеру, вычислительное устройство и устройство ввода-вывода, первый выход которого соединен со вторым входом вычислительного устройства, второй выход которого через плату синхронизации и управления соединен с варифокальным объективом; схему защиты по питанию, выход которой соединен со входом высокостабильного источника питания DC-DC, второй выход которого соединен со вторым входом схемы защиты по питанию, первый выход источника питания DC-DC соединен соответственно со входами по питанию варифокального объектива, видеокамеры, вычислительного устройства, устройства ввода-вывода, платы синхронизации и управления, входом устройства подогрева, выход которого соединен с обогревателем стекла, выход внешнего индикатора и пульта управления соединен с третьим входом устройства ввода-вывода, а второй выход устройства ввода-вывода соединен со входом внешнего индикатора и пульта управления; выход внешнего источника питания соединен с первым входом схемы защиты, причем выход измерителя веса соединен со входом устройства ввода-вывода, а внешний индикатор и пульт управления по радиочастотному каналу соединены с внешним ноутбуком.
Существенными отличиями по отношению к прототипу в устройстве для измерения длины и скорости, ускорения перемещения колонны труб при спускоподъемных операциях является новое выполнение блока видеоизмерения и дополнительное введение новых блоков и их связей,
Предлагаемая конструкция блока видеоизмерения позволяет разместить его непосредственно на платформе рядом с колонной труб и измерять ее технологические параметры непосредственно по самим фрагментам труб, а не косвенно связанной с ней мишени. Кроме того исключается влияние посторонних факторов на процесс измерения (меторологические осадки, пыль, движение технических средств рядом со скважиной и т.д.).
Сущность изобретения поясняется чертежами, где:
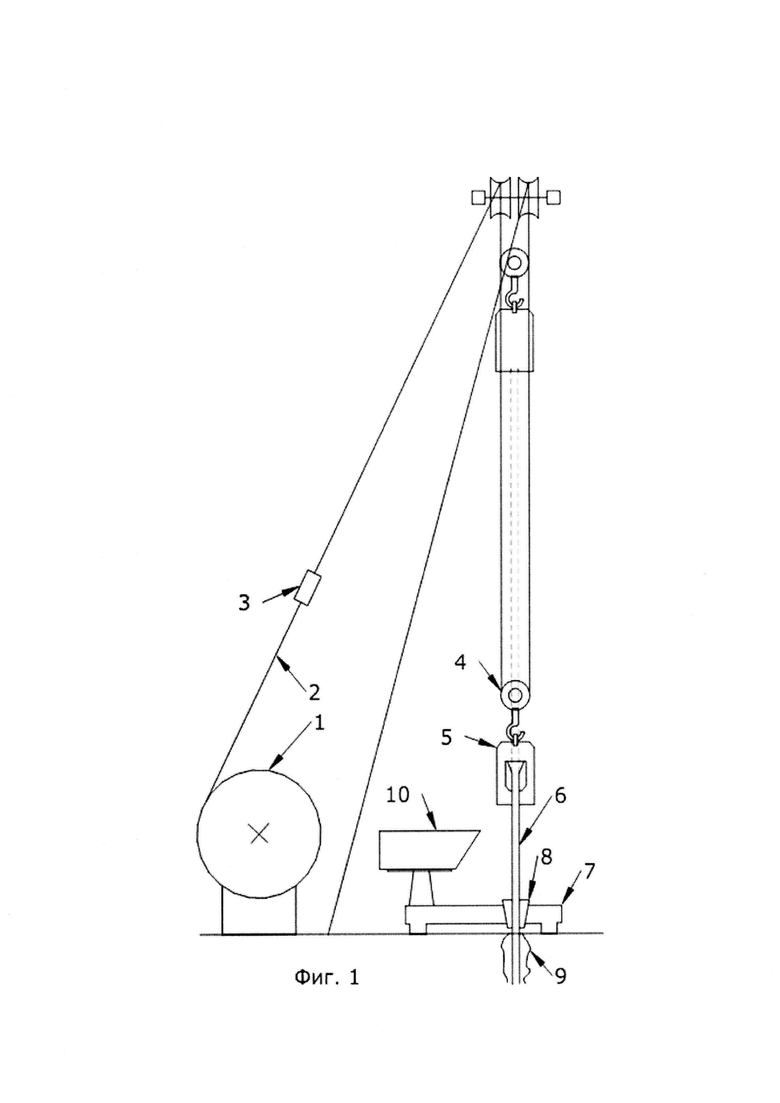
на фиг. 1 схематично представлен чертеж конструкции, реализующей спуск колонны длинномерных тел в скважину, и показано положение блока видеоизмерения;
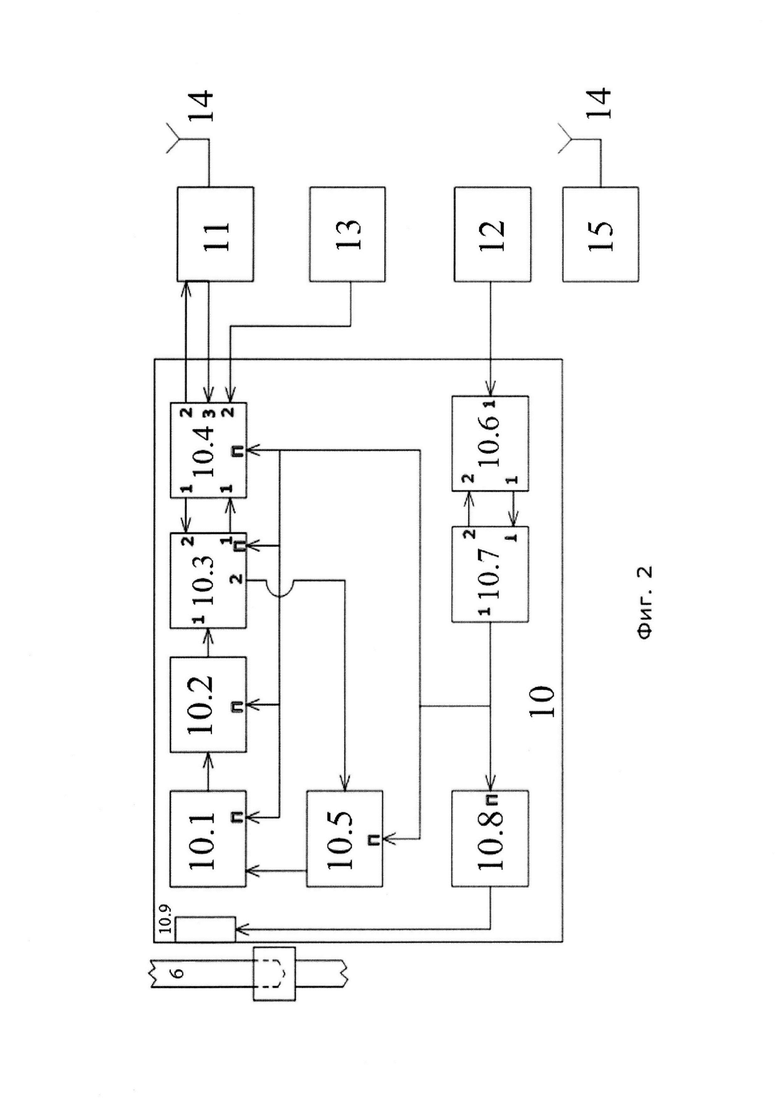
на фиг. 2 - представлена схема блока видеоизмерения и введены следующие обозначения:
1. канатная лебедка
2. канат
3. датчик веса
4. талевый блок
5. элеватор
6. колонна труб
7. платформа
8. клиновый захват спайдера
9. обсадная труба скважин
10. блок видеоизмерения
10.1 - варифакальный объектив
10.2 - цифровая видеокамера
10.3 - вычислительное устройство
10.4 - устройство ввода-вывода
10.5 - плата синхронизации и управления
10.6 - схема защиты по питанию
10.7 - источник питания DC-DC
10.8 - устройство подогрева
10.9 - обогреватель стекла
11. внешний индикатор и пульт управления
12. внешнего источника питания
13. измеритель веса
14. радиочастотный канал
15. внешний ноутбук
Способ осуществляется следующим образом: при спуске колонны труб в скважину канатной лебедкой, установленной с возможностью возвратно-поступательного движения и снабженной измерителем веса, устанавливают блок видеоизмерения, закрепляют его на платформе таким образом, чтобы последний фрагмент колонны труб постоянно был в зоне визуального контроля, формируют последовательность видеокадров наблюдаемых фрагментов движущейся колонны через равные промежутки времени, выделяют на видеокадрах рельефные контрастные точки, по линейному перемещению которых от видеокадра к видеокадру рассчитывают скорость и ускорение движения колонны труб, величину ее вертикального перемещения, а по числу зафиксированных соединений труб определяют их количество в колонне, уменьшение погрешности измерения осуществляют усреднением перемещения нескольких независимых наборов рельефных контрастных точек, по весу колонны труб корректируют ее конечную длину на величину линейного растяжения труб. Частота формирования кадров, определяющая промежутки времени измерения, и их размер подбирают в зависимости от скорости движения колонны труб при спуске таким образом, чтобы перемещение рельефных контрастных точек происходило в пределах линейного размера одного кадра на промежутке времени измерения, соответствующего длительности не менее трех - четырех смежных кадров, что исключает потерю этих точек при измерении. Обработка видеоизображений и расчеты выполняют на специализированном вычислительном устройстве с помощью специального программного обеспечения. Определение скорости погружения рассчитывают как величину перемещения рельефных контрастных точек на соседних V(n и n+1) кадрах, определение ускорения погружения как разницы скоростей между кадрами А=V(n и n+1) - V(n+1 и n+2), определении глубины погружения как суммы скоростей между парами кадров во всей последовательности кадров: L(k)=V(1 и 2) + V(n и n+1) +…+ V(k-1 и k). Корректировка измеренного значения глубины погружения рабочего инструмента в скважину с учетом удлинения колонны труб под собственным весом осуществляют по данным измерителя веса, а температурное расширение элементов колонны рассчитывают по справочным данным. Количество труб в колонне определяют по числу зафиксированных в изображениях соединений с использованием муфт большего диаметра, чем диаметр предыдущей трубы колонны.
Устройство для погружения колонны длинномерных тел в скважину содержит канатную лебедку 1, на канате 2 которой установлен датчик веса 3, а на талевом блоке 4 установлен элеватор 5, захватывающий каждую трубу колонны 6. Через платформу 7 установлен клиновый захват спайдера 8 для удержания трубы в процессе ее соединения со следующей трубой колонны, которая закреплена в элеваторе 5. Под платформой 7 расположена обсадная труба скважин 9, в которую опускается и поднимается колонна труб 6. На платформе 7 жестко закреплен блок видеоизмерения 10 на расстоянии 1.0... 1.5 метра от спайдера 8 и на высоте, при которой в зоне видеоконтроля постоянно находится последний элемент формируемой колонны труб 6.
Блок видеоизмерения 10 содержит последовательно соединенные варифакальный объектив 10.1, цифровую видеокамеру 10.2, вычислительное устройство 10.3 и устройство ввода-вывода 10.4, первый выход которого соединен со вторым входом вычислительного устройства 10.3, второй выход которого через плату синхронизации и управления 10.5 соединен со входом варифакального объектива 10.1; схему защиты по питанию 10.6, выход которой соединен с входом источника питания DC-DC 10.7, второй выход которого соединен со вторым входом схемы защиты по питанию 10.6., первый выход источника питания DC-DC 10.7 соединен соответственно со входами по питанию варифакального объектива 10.1, цифровой видеокамеры 10.2, вычислительного устройства 10.3, устройства ввода-вывода 10.4, платы синхронизации и управления 10.5, входом устройства подогрева 10.8, выход которого соединен с обогревателем стекла 10.9; выход внешнего индикатора и пульта управления 11 соединен с третьим входом устройства ввода-вывода 10.4, а второй выход устройства ввода-вывода 10.4 соединен со входом внешнего индикатора и пульта управления 10.11; выход внешнего источника питания 12 соединен с первым входом схемы защиты по питанию 10.6, выход измерителя веса 13 соединен со вторым входом устройства ввода-вывода 10.4, а внешний индикатор и пульт управления 11 по радиочастотному каналу 14 соединены с внешним ноутбуком 15. В качестве вычислительного устройства 10.3 использован микрокомпьютер.
Устройство работает следующим образом: первую из колонны труб 6 с помощью элеватора 5 и лебедки 2 подают в скважину 9 и закрепляют в спайдере 8. Установленный на платформе блок видеоизмерения 10 таким образом, чтобы первый элемент колонны труб оказался на линии визирования варифокальным объективом 10.1 и с помощью внешнего индикатора и пульта управления 11 настраивают варифокальный объектив 10.1 на максимальную контрастность и яркость изображения. В дальнейшем подстройка этих параметров обеспечивается автоматически сигналом управления с вычислительного устройства (микрокомпьютера) 10.3 через плату синхронизации и управления 10.5. На цифровую видеокамеру 10.2 через стекло в корпусе 10.9 и варифокальный объектив 10.1 поступает серия фотоизображений фрагментов (кадров) неподвижной или движущейся колонны труб 6. В цифровой видеокамере 10.2 с заданной частотой формируется серия изображений фрагментов (кадров) неподвижной или движущейся колонны труб 6. В вычислительном устройстве 10.3 с помощью специального программного обеспечения на каждом кадре выделяется совокупность рельефных контрастных точек, определяется величина перемещения этих точек через равные промежутки времени формирования видеокадров.
Для уменьшения погрешности измерения усредняют перемещения контролируемых точек на интервале времени измерения, затем суммируют измеренные величины перемещений на интервале времени от начала перемещения объекта до его конечной остановки. Частоту формирования кадров, определяющую промежутки времени измерения и их размер, подбирают в зависимости от скорости движения колонны труб при спуске таким образом, чтобы перемещение рельефных контрастных точек происходило в пределах линейного размера одного кадра на промежутке времени измерения, соответствующего длительности не менее трех -четырех смежных кадров, что исключает потерю этих точек при измерении. В вычислительном устройстве 10.3 определение скорости погружения колонны труб рассчитывается как величина перемещения опорных контрастных точек на соседних V(n и n+1) кадрах, определение ускорения погружения как разницы скоростей между кадрами А=V(n и n+1) - V(n+1 и n+2), определении глубины погружения как суммы скоростей между парами кадров во всей последовательности кадров: L(k)=V(1 и 2) + V(n и n+1) +…+ V(k-1 и k). Корректировка измеренного значения глубины погружения рабочего инструмента в скважину с учетом удлинения колонны труб под собственным весом осуществляется по данным измерителя веса 3.
Количество труб в колонне подсчитывается по числу зафиксированных элементов их соединения, имеющий диаметр больший, чем диаметр труб.
Вычисленные значения текущей длинны колонны труб, скорости и ускорения ее движения, количества труб в колонне через устройство ввода-вывода 10.4 передают на внешний индикатор и пульт управления 11, расположенный на рабочем месте оператора управления работой спуско-подъемного механизма.
Собственная схема защиты по питанию 10.6 и источник питания DC-DC 10.7, содержащий резервный аккумулятор, обеспечивают работоспособность устройства при отказе или сбоях в работе внешнего источника питания 12.
Устройство подогрева 10.8 обеспечивает отсутствие запотевания стекла герметичного корпуса и поддерживает рабочую температуру в зимний период эксплуатации внутри блока видеоизмерения 10. При необходимости измеренные технологические параметры по радиочастотному каналу 14 передаются на внешний ноутбук 15 бригады для анализа и дальнейшего использования.
На основании вышеизложенного достигается реализация заявленного технического результата. Дополнительным техническим результатом является сокращение времени на спускоподъемные операции рабочего инструмента.
Предлагаемое изобретение отличается от прототипа тем, что во-первых, в процессе измерения длины колонны труб измеряется перемещение непосредственно элементов, входящих в ее состав (НКТ), а не косвенно связанных с ней элементов спускоподъемного механизма, а именно мишени, закрепленной на талевом блоке, перемещения которой в пространстве вносят дополнительные ошибки в результат измерения при каждой спускоподъемной операции. Во-вторых, тем, что блок видеоизмерения, устанавливается и жестко закрепляется на платформе спускоподъемного механизма на минимальном расстоянии от колонны труб, а не на выносном штативе на значительном расстоянии L от платформы, обеспечивающем устойчивое наблюдение камерой мишени, закрепленной на талевом блоке как в самом верхнем ее положении, так и в самом нижнем. При этом реализация измерений способом прототипа подвержена значительному влиянию возможных помех факторами внешней среды (дождь, снег, пыль, туман, плохая видимость в ночное время), положение штатива с устройством видеонаблюдения не должно находиться в зоне движения транспортных средств и персонала рабочей бригады. Перечисленные факторы либо приводят к увеличению погрешности измерения, либо к срыву видеонаблюдения мишени, то есть к невозможности реализации операции измерения. В предлагаемом способе измерение осуществляется дистанционным бесконтактным оптическим формированием последовательности видеокадров на колонне труб, выделением на них рельефных контрастных точек, определением величины перемещения этих точек через равные промежутки времени формирования кадров, снижения погрешности измерения путем усреднения перемещения по контролируемым точкам на интервале времени измерения, суммированием измеренных усредненных перемещений на интервале времени от начала перемещения объекта до его конечной остановки, то есть на общем интервале времени измерения. Это позволит сократить время выполнения вспомогательных и подготовительных спускоподъемных операций, контроль за скоростью и ускорением движения колонны труб позволит уменьшить вероятность ее повреждения за счет динамических ударов об обсадную трубу (стенки скважины) и динамических нагрузок на разрыв при торможении колонны.
Из доступных источников патентной и научно-технической литературы нам неизвестна заявленная совокупность отличительных признаков. Следовательно, предлагаемый способ и устройство, его реализующее, отвечает критерию "существенные отличия".
Экспериментальное измерение длины, скорости и ускорения движения длинномерных тел, соединяемых в колонну, было выполнено с помощью экспериментального образца измерительного устройства при реальном спуске в нефтегазовую скважину колонны насосно-компрессорных труб (НКТ) в процессе проведения подземного ремонта.
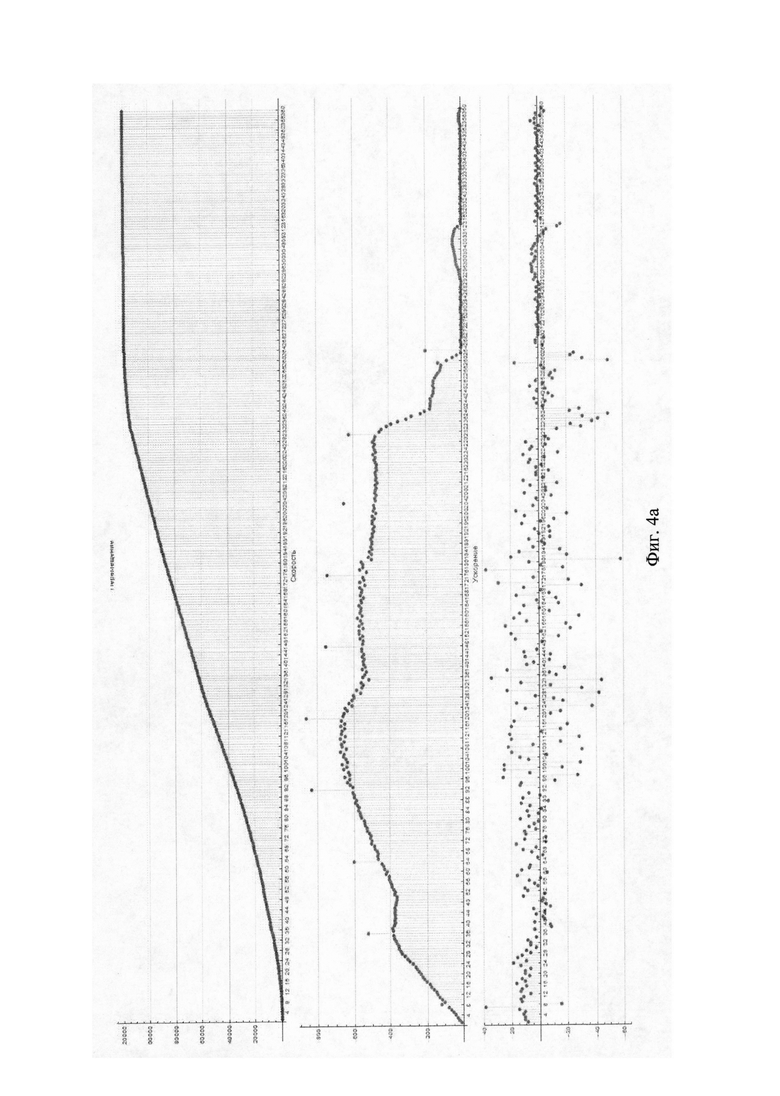
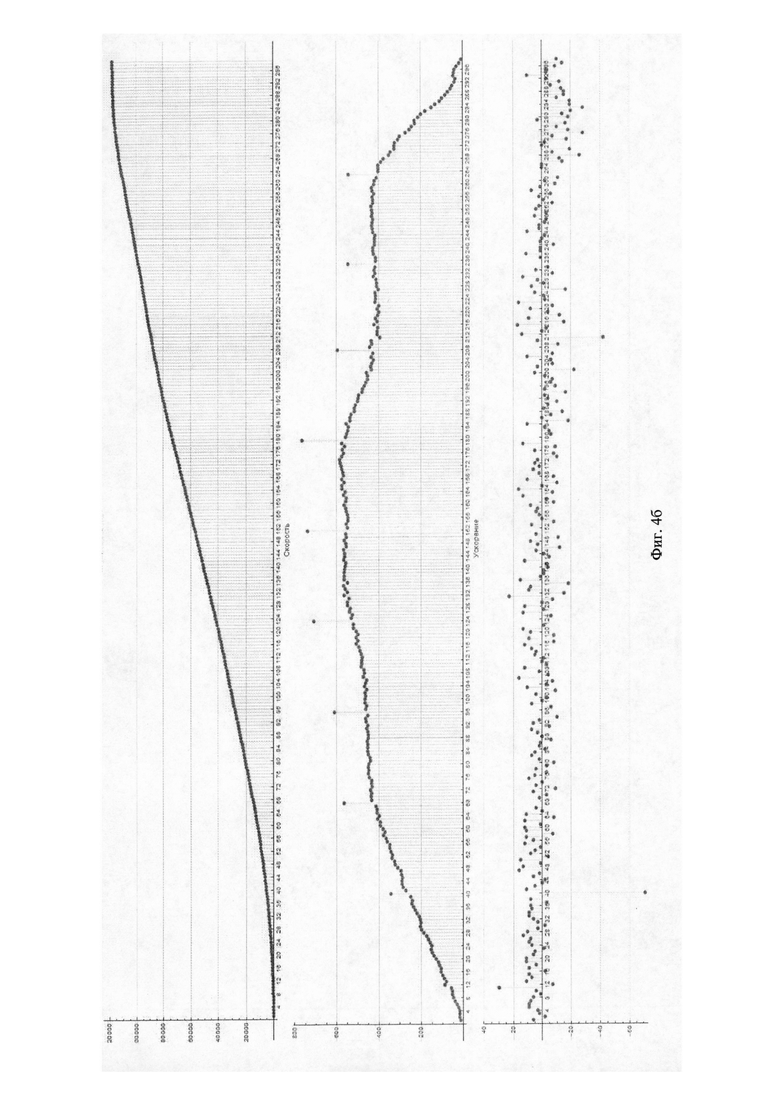
С помощью элеватора 5, подвешенного на крюке талевого блока 4, с мостков снимали первую трубу колонны 6, опускали ее в обсадную трубу 9 скважины, фиксировали клиновым захватом спайдера 8, установленного на фланце обсадной трубы 9 скважины. Затем, таким же образом, с мостков снимали вторую трубу 6 и соединяли с первой с помощью резьбового соединения. Колонну из двух соединенных труб приподнимали лебедкой с целью освобождения клинового захвата спайдера 8, затем опускали в скважину и фиксировали клиновым захватом спайдера 8. Далее с мостков снимали очередную трубу и весь цикл, включающий в себя соединение труб, приподъем (реверсивное движение колонны) их с целью освобождения клинового захвата спайдера, опускание в эксплуатационную колонну очередной трубы и фиксацию ее клиновым захватом спайдера повторяли до завершения спуска всей колонны труб. Полученный видеоряд измерительных кадров приведен на фиг. 3. Эксперимент подтвердил работоспособность измерительного устройства и расчет линейного перемещения колонны НКТ с погрешностью, не хуже заданной. Кроме того, имеется возможность расчета и анализа скорости и ускорения движения колонны НКТ при спуске (см. фиг. 4), количества труб в колонне. В экспериментальном блоке измерения в качестве варифокального объектива был использован 3-х мегапиксельный E5Z2518C-MP, в качестве цифровой видеокамеры BRZ-2352HM-GE, в качестве вычислительного устройства использован микрокомпьютер CEM310PG-E3950+4GB(Ind) с операционной системой Win 10.
На фиг. 3 в качестве примера представлена одна из полученных последовательностей видеокадров фрагмента движущейся колонны труб, сформированной видеокамерой в ходе эксперимента.
На фиг. 4а и фиг. 4б представлены графики измерения текущего линейного перемещения колонны труб, скорости и ускорения движения колонны труб, полученные по результатам обработки первичной видеоинформации в микрокомпьютере.
Эксперимент подтвердил работоспособность заявленного способа и устройства, его реализующего.

Изобретение относится к нефтегазовой отрасли и может быть использовано для точного измерения глубины погружения рабочего инструмента, закрепленного на первом элементе колонны длинномерных тел, в частности насосно-компрессорных труб (НКТ), спускаемых в нефтегазовую скважину при проведении в ней подземных ремонтных или профилактических работ. Техническим результатом является повышение точности измерения текущей глубины погружения рабочего инструмента и дополнительно измерение скорости и ускорения перемещения колонны труб при проведении спускоподъемных операций. Способ включает формирование с помощью блока видеоизмерения, расположенного на некотором расстоянии от НКТ и закрепленного на платформе таким образом, чтобы объект был в зоне визуального контроля, последовательной серии фотоизображений фрагментов движущегося объекта, выделения на них контрастных рельефных точек, определения величины перемещения этих точек через равные промежутки времени, снижения погрешности измерения путем усреднения перемещения по контролируемым точкам на интервале времени измерения, суммирования измеренных усредненных перемещений на интервале времени от начала перемещения объекта до его конечной остановки. В устройство для измерения технических параметров колонны труб, спускаемой в скважину, содержащее канатную лебедку, снабженную измерителем веса, на которой установлен талевый блок с элеватором для захвата и подъема труб, соединяемых в колонну, внешний ноутбук и радиочастотный канал, дополнительно введены блок видеоизмерения, внешний индикатор с пультом управления и внешний источник питания. 2 н.п. ф-лы, 4 ил.
1. Способ измерения технологических параметров колонны труб спускаемой в скважину, содержащий спуск колонны труб в скважину канатной лебедкой, установленной с возможностью возвратно-поступательного движения и снабженной измерителем веса на талевом блоке, отличающийся тем, что предварительно устанавливают блок видеоизмерения в непосредственной близости от колонны труб и закрепляют на платформе таким образом, чтобы объект был в зоне визуального контроля, формируют последовательность видеокадров наблюдаемых фрагментов движущейся колонны через равные промежутки времени, выделяют на видеокадрах рельефные контрастные точки, определяют величины перемещения этих точек через равные промежутки времени формирования видеокадров, по линейному перемещению которых от видеокадра к видеокадру рассчитывают скорость, ускорение движения колонны труб и величину ее вертикального перемещения, фиксируют число соединений труб и определяют их количество в колонне, причем уменьшение погрешности измерения осуществляют усреднением перемещения нескольких независимых наборов рельефных контрастных точек, затем измеряют вес колонны труб и корректируют ее конечную длину на величину линейного растяжения труб.
2. Устройство для измерения технических параметров колонны труб, спускаемой в скважину, содержащее канатную лебедку, снабженную измерителем веса, на которой установлен талевый блок с элеватором для захвата и подъема труб, соединяемых в колонну, внешний ноутбук и радиочастотный канал, отличающееся тем, что в устройство дополнительно введены блок видеоизмерения, внешний индикатор с пультом управления и внешний источник питания, причем блок видеоизмерения содержит последовательно соединенные варифокальный объектив, цифровую видеокамеру, вычислительное устройство и устройство ввода-вывода, первый выход которого соединен со вторым входом вычислительного устройства, второй выход которого через плату синхронизации и управления соединен с варифокальным объективом; схему защиты по питанию, выход которой соединен с входом высокостабильного источника питания DC-DC, второй выход которого соединен со вторым входом схемы защиты по питанию, первый выход источника питания DC-DC соединен соответственно со входами по питанию варифокального объектива, цифровой видеокамеры, вычислительного устройства, устройства ввода-вывода, платы синхронизации и управления, входом устройства подогрева, выход которого соединен с обогревателем стекла; выход внешнего индикатора и пульта управления соединен с третьим входом устройства ввода-вывода, а второй выход устройства ввода-вывода соединен с входом внешнего индикатора и пульта управления; выход внешнего источника питания соединен с первым входом схемы защиты по питанию, причем выход измерителя веса соединен с входом устройства ввода-вывода, а внешний индикатор и пульт управления по радиочастотному каналу соединены с внешним ноутбуком.
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ И ИХ ИДЕНТИФИКАЦИИ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2015 |
|
RU2593609C1 |
| Устройство для измерения длины колонны труб, спускаемых в скважину | 1978 |
|
SU750046A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ БУРОВОГО ДОЛОТА ДО ЗАБОЯ СКВАЖИНЫ | 2015 |
|
RU2673244C1 |
| WO 2014007790 A1, 09.01.2014. | |||

