Изобретение относится к нефтегазодобывающей промышленности, а именно к устройствам контроля глубины спуска в скважину колонны труб с буровым инструментом или геофизических модулей на трубах для каротажных исследований в процессе бурения, а также при капитальном ремонте скважин.
При добыче углеводородов, а также проведении геофизических исследований в процессе бурения является целесообразным ведение учета глубины местонахождения бурового инструмента или скважинного устройства посредством учета текущей длины спускаемых труб буровой колонны и того, какие компоненты расположены в скважине. Глубина нахождения бурового инструмента в скважине определяется суммарной чистой длиной труб, которые прошли через пол буровой установки с момента спуска бурильной колонны и высотой подъема (спуска) талевого блока (ТБ) относительно стола ротора.
Как правило, искомая глубина местонахождения бурового инструмента или устройства на трубах определяется измерительной системой буровой установки, принцип действия которой основан на преобразовании датчиком числа оборотов углового перемещения вала буровой лебедки пропорционального высоте подъема/спуска талевого блока относительно стола ротора в последовательность импульсов. Импульсы с выхода датчика поступают на вход электронного модуля. Подсчет числа импульсов и вычисление значений искомой глубины осуществляется электронным модулем с помощью встроенного программного обеспечения.
При этом достоверность измерений определяется параметром перемещения талевого блока, значение которого зависит от растяжения талевого каната в зависимости от веса на крюке.
Известные методики и устройства для обеспечения точности определения глубин погружения бурового оборудования на трубах направлены, как правило, на модернизацию конструкции измерительной системы углового перемещения вала буровой лебедки или на усовершенствование программного обеспечения.
Известно устройство для определения глубины местонахождения бурового инструмента или скважинного прибора, точность которого обеспечивается за счет конструкции датчика измерения углового перемещения вала буровой лебедки (Датчик положения талевого блока "ДОЛ-5" ООО НПП "Геосфера". Каталожный номер UPEG 01.01.21. Ссылка на устройство, http://geosferatver.ru/datchiki/dol-5/dol-5.php).
Известны система и способ учета буровых труб (патент РФ №261824 Е21В 47/04; Е21В 47/09; Е21В 19/10, 2013 г.) согласно которой состояние спуско-подъемных операций осуществляется устройством запроса беспроводной метки посредством мониторинга движения буровой лебедки, поддерживающей буровое долото и длины буровой трубы. Беспроводные метки в зависимости от поставленной задачи измерений наносятся на каждую из труб, на клиновые захваты либо на долоте или части буровой колонны. При этом само устройство запроса метки (например, антенна для РЧИ), располагается около подроторной воронки, связанной с дном стола ротора либо (в случае отсутствия стола ротора) крепится к конструкциям, расположенным ниже пола буровой установки таким образом, что беспроводная метка, проходящая через пол буровой установки в процессе спуско-подъемных операций могла определиться устройством запроса метки.
Принцип действия известных систем основан на преобразовании угловых перемещений вала буровой лебедки в двухфазный электрический сигнал, пропорциональный числу оборотов вала и зависящий от направления движения талевого блока. Задача повышения точности измерений известными способами и системами решается, как правило, за счет усовершенствования конструкции мерной базы буровой лебедки либо электронных систем измерительного блока или преобразования и обработки получаемых сигналов.
Недостатками известных способов и систем является то, что конечный результат измерений глубины погружения бурового оборудования в скважину в любом случае зависит от точности мониторинга движения буровой лебедки, поддерживающей буровое долото, и длины буровой трубы. Для чего на предварительном этапе подготовки канала измерения к работе необходима градуировка канала измерений, определяющая зависимость высоты подъема (спуска) талевого блока относительно стола ротора от количества оборотов барабана буровой лебедки, изменением диаметра навивки талевого каната на барабан. При этом в процессе работы на скважине возникают изменения параметров талевой системы (растяжение кабеля, вес на крюке), которые вносят свою погрешность в точность измерений. Кроме того, погрешность накапливается также в связи с проскальзыванием ременной передачи буровой лебедки под тяжестью буровой колонны, например, при больших глубинах.
Задачей настоящего изобретения является обеспечение точности определения глубины погружения бурового оборудования на трубах в скважину независимо от параметров мерной базы буровой лебедки.
Поставленная задача решается следующим образом
Согласно способе определения глубины погружения скважинного оборудования на трубах, включающему мониторинг перемещения талевого блока буровой мачты относительно стола ротора, буровую мачту дополнительно оснащают первым ультразвуковым излучателем, устанавливаемым на ее вершине, вторым ультразвуковым излучателем, устанавливаемым на уровне стола ротора, и бесконтактным приемником-передатчиком, устанавливаемым на талевом блоке, а в процессе спуско - подъемных операций посредством регистрации времени пробега импульсов от первого и второго ультразвуковых излучателей до бесконтактного приемника-передатчика определяют текущее положение талевого блока в реальном режиме времени, которое рассчитывают по формуле
L0=Vзв (t1i+t2i), где:
L0 - текущее положение талевого блока,
Vзв - скорость звука в воздухе,
t1i - текущее время пробега от первого излучателя до приемника-передатчика,
t2i - текущее время пробега от второго излучателя до приемника-передатчика.
Предложенный способ имеет следующие преимущества по сравнению с известными аналогами:
Высокая точность определения искомого параметра достигается за счет применения бесконтактной мерной базы (ультразвуковых излучателей и бесконтактного приемопередатчика), устанавливаемой непосредственно на талевой системе, в результате чего:
- обеспечивается возможность мониторинга движения талевого блока независимо от параметров буровой лебедки, чем достигается высокая точность определения глубины погружения колонны труб и/или бурового оборудования в скважину;
- обеспечивается возможность мониторинга искомого параметра в реальном режиме времени, при этом наличие двух ультразвуковых излучателей позволяют в процессе расчета глубины погружения бурового оборудования на трубах исключить зависимость конечного результата измерений от параметров окружающей среды - то есть погрешность параметра скорости звука в воздухе, зависящая от окружающей среды, не влияет на конечный результат измерений, получаемых предложенным способом;
- применение ультразвуковых излучателей обеспечивает высокую точность измерений, так как низкочастотные звуки от динамических воздействий на буровое оборудование в процессе работы на скважине (например, звуки от удара колонны о стол ротора и прочее) не воспринимаются приемником-передатчиком и не влияют на достоверность измерений.
Для реализации предложенного способа определения глубины погружения скважинного оборудования на трубах на практике не требуется специальных материалов и оборудования. При этом в качестве источников ультразвука могут быть использованы промышленно выпускаемые ультразвуковые излучатели, а бесконтактный приемник-передатчик представляет собой электронный блок в виде небольшой платы, монтируемой непосредственно на талевом блоке.
На фиг. представлена схема расположения ультразвуковых излучателей и бесконтактного приемо-передатчика на талевой системе буровой мачты.
Для реализации предложенного способа определения глубины погружения скважинного оборудования на трубах на вершине буровой мачты устанавливается ультразвуковой излучатель 1, на уровне стола ротора устанавливается ультразвуковой излучатель 2. Непосредственно на талевом блоке крепится бесконтактный приемник -передатчик 3, сигналы от которого обрабатываются наземным измерительным модулем (компьютером).
В процессе спуско-подъемных операций ультразвуковыми излучателями 1 и 2 с частотой (30-40 кГц) излучаются сигналы, которые в реальном режиме времени поочередно принимаются приемником-передатчиком 3 и передаются по заданному радиосигналу в наземный измерительный модуль 4 как информация о времени пробега первого и второго излученных сигналов до приемника-передатчика 3 на талевом блоке. При поступлении с приемника-передатчика 3 импульсного сигнала в наземный измерительный модуль, канал измерения последнего преобразует получаемую информацию в двоичный код, по заданному алгоритму производит расчет текущего положения талевого блока относительно стола ротора и результаты расчета выводит на регистрирующее или показывающее устройство.
Таким образом в процессе спуско-подъемных операций посредством регистрации времени пробега излучаемых импульсов от ультразвукового излучателя 1 и ультразвукового излучателя 2 до приемника - передатчика 3 глубина погружения бурового оборудования в скважину определяется как функция текущего положения талевого блока, которую рассчитывают по формуле
L0=Vзв (t1i+t2i), где:
L0 - текущее положение талевого блока,
Vзв - скорость звука в воздухе,
t1i - текущее время пробега от излучателя 1 до приемо-передатчика 3,
t2i - текущее время пробега от излучателя 2 до приемо-передатчика 3.
В воздухе скорость звука зависит от параметров окружающей среды (влажность, температура), которые ведут к погрешности измерений величины L0. Однако наличие двух излучателей в данном случае, длина пробега от каждого из которых до приемопередатчика определяется по одной и той же формуле l1i=Vзв t1i и l2i=Vзв t2i соответственно, в совокупности позволяют исключить влияние этой погрешности на конечный результат измерения.
А именно, исходя из того, что текущее положение талевого блока определяется как
L0=l1i+l2i=Vзв (t1i+t2i), отсюда
Vзв=L0/(t1i+t2i), соответственно l1i=t1i L0 / (t1i+t2i) и l2i=t2i L0 / (t1i+t2i), то есть расчетная длина пробега от каждого из излучателей 1 и 2 до приемника-передатчика 3 не зависит от скорости звука и не влияет на конечный результат измерений предложенным способом.
На практике в процессе измерений предложенным способом при Vзв=350 м/сек и L0=40 м время пробега составило tnax = 0,1 с., а при L0 = 4 м время пробега составило tmin = 0, 01с.
Буровая лебедка в данном случае используется только для поддерживания спускаемой трубы или колонны труб с буровым оборудованием в скважину. В процессе работ на скважине буровая колонна может периодически подвешиваться на столе ротора посредством использования клиновых захватов, которые захватывают буровую колонну и удерживают ее со стороны пола стола ротора. В этом случае буровая колонна не поддерживается буровой лебедкой и в течение этих периодов буровая лебедка может быть использована для других целей (например, для спуска измерительных геофизических модулей или ремонтного оборудования).
На основании изложенного считаем, что поставленная задача изобретения решена в полном объеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ, СПУСКАЕМЫХ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2753907C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ КОЛОННЫ ТРУБ, СПУСКАЕМОЙ В СКВАЖИНУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714167C1 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| Буровая установка | 1979 |
|
SU819299A1 |
| Устройство для испытания гидроакустической системы позиционирования плавучей буровой установки | 1987 |
|
SU1477835A1 |
| Способ контроля за наработкой элементов бурильной колонны | 1989 |
|
SU1714107A1 |
| Способ оптимизации скорости спуска-подъема бурильной колонны | 1989 |
|
SU1765350A1 |
| Установка для глубоководного бурения и способ глубоководного бурения | 2018 |
|
RU2694669C1 |

Изобретение относится к нефтегазодобывающей промышленности и может быть использовано для контроля глубины спуска в скважину колонны труб. Техническим результатом является повышение точности определения глубины погружения бурового оборудования независимо от параметров буровой лебедки. Предложен способ определения глубины погружения скважинного оборудования на трубах посредством мониторинга перемещения талевого блока буровой мачты относительно стола ротора, в котором буровую мачту дополнительно оснащают ультразвуковым излучателем 1, устанавливаемым на ее вершине, ультразвуковым излучателем 2, устанавливаемым на уровне стола ротора, и бесконтактным приемником- передатчиком 3, устанавливаемым на талевом блоке 4. В процессе спуско-подъемных операций регистрируют время пробега импульсов от ультразвуковых излучателей 1 и 2 до приемника-передатчика 3 и регистрируют текущее положение талевого блока 4 в реальном режиме времени. 1 ил.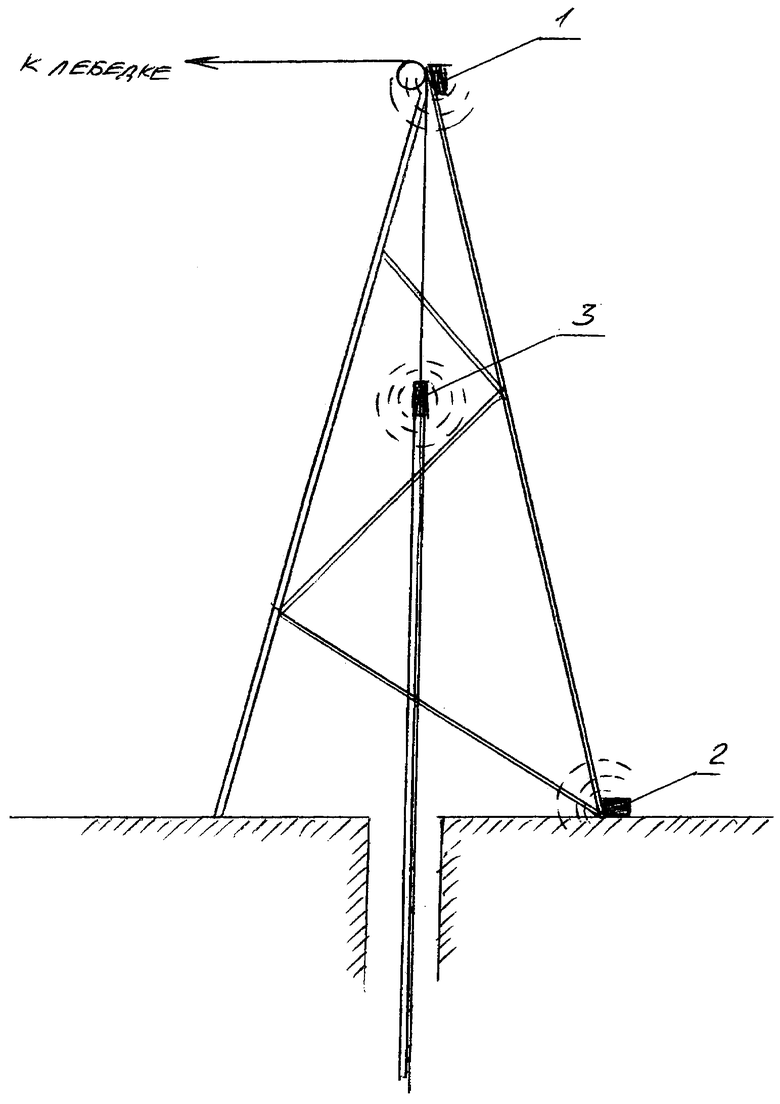
Способ определения глубины погружения скважинного оборудования на трубах посредством мониторинга перемещения талевого блока буровой мачты относительно стола ротора, отличающийся тем, что буровую мачту дополнительно оснащают первым ультразвуковым излучателем, устанавливаемым на ее вершине, вторым ультразвуковым излучателем, устанавливаемым на уровне стола ротора, и бесконтактным приемником-передатчиком, устанавливаемым на талевом блоке, а в процессе спуско-подъемных операций посредством регистрации времени пробега импульсов от первого и второго ультразвуковых излучателей до бесконтактного приемника-передатчика в реальном режиме времени определяют текущее положение талевого блока, которое рассчитывают по формуле
L0 = Vзв (t1i + t2i),
где L0 - текущее положение талевого блока,
Vзв - скорость звука в воздухе,
t1i - текущее время пробега от первого ультразвукового излучателя до приемника-передатчика,
t2i - текущее время пробега от второго ультразвукового излучателя до приемника-передатчика.
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| Устройство для измерения глубины погружения бурильного инструмента в скважину | 1977 |
|
SU724708A2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПРИ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЯХ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН (ВАРИАНТЫ) | 2008 |
|
RU2375568C1 |
| US 2003234119 A1, 25.12.2003. | |||

