Область техники
Изобретение относится к способам и устройствам обеспечения безопасности эксплуатации летательных аппаратов, в частности к способам предупреждения и/или предотвращения нештатных ситуаций, связанных с возможным попаданием летательного аппарата в опасную зону возмущенного воздушного потока от другого объекта, так называемого вихревого следа, генерируемого объектом, в том числе, при обтекании объекта воздушным потоком.
Предшествующий уровень техники
Проблема обеспечения безопасности полетов летательных аппаратов является весьма актуальной и включает в себя целый ряд как научно-технических, так и организационно-методических проблем. Одной из таких проблем является обеспечение безопасности полетов в условиях, когда фактором, определяющим уровень безопасности полетов, является воздействие на летательный аппарат аэродинамических струй высокой степени турбулентности, образующихся как при движении в окрестности летательного аппарата объекта, генерирующего струи, так и при наличии в окрестности летательного аппарата объектов, обтекаемых воздушными потоками, имеющими высокую степень турбулентности и завихренности.
Известно, что при движении летательного аппарата в воздушном пространстве образуется так называемый «вихревой след», формируемый обтекающим его воздушным потоком.
Попадание летательного аппарата в вихревой след другого объекта, например, другого летательного аппарата, приводит к значительному изменению углов атаки и скольжения. На летательный аппарат при этом воздействуют аэродинамические силы и моменты, которые могут, например, отбросить его в сторону от следа и при малых высотах, например, при посадке или взлете летательного аппарата, привести к нештатным ситуациям из-за невозможности компенсации такого воздействия органами управления летательного аппарата.
Появление в авиации летательных аппаратов, имеющих крылья малых удлинений с большой удельной нагрузкой, приводит к увеличению интенсивности вихревого следа, что соответственно увеличивает опасность попадания в него летательного аппарата.
Многочисленные исследования перемещения и затухания вихрей показали, что такие атмосферные факторы, как ветер, сдвиг ветра, стратификация и турбулентность, играют важную роль в этих процессах.
Существует потенциальная возможность оптимизации безопасных расстояний между летательными аппаратами в процессе посадки, взлета и полета на основе достоверного прогнозирования динамики вихревого следа с учетом текущего и краткосрочного прогноза соответствующих метеорологических условий, влияния атмосферных условий и близости земли на динамику вихревого следа.
Одним из основных направлений решения проблемы обеспечения безопасности полета летательного аппарата в условиях, когда определяющим фактором является вихревой аэродинамический след, является выбор режимов полета, обеспечивающих заданный уровень безопасности.
Способствовать решению этой задачи может создание бортовых вычислительных систем, работающих в реальном масштабе времени, определяющих степень опасности аэродинамических возмущений, действующих на летательный аппарат, позволяющих выбрать способ последующей коррекции управления летательным аппаратом с целью наиболее эффективной компенсации этих возмущений.
Другой задачей, которую можно отнести к информационным задачам, является задача предоставления пилоту информации о положении вихревого следа и положении летательного аппарата относительно него в прогнозируемый момент времени.
Известен способ и устройство создания визуальных отображений вихревых следов путем математического моделирования их на основе характеристик летательного аппарата, генерирующего вихревой след, с учетом влияния атмосферных условий на состояние вихревого следа. При этом согласно техническому решению в устройстве использован быстрореагирующий дисплей, на котором осуществляют визуализацию смоделированных вихревых следов от каждого летательного аппарата, находящегося вблизи указанного летательного аппарата (US, 5845874, А). Однако при наличии в окружении летательного аппарата большого количества других летательных аппаратов, например, вблизи аэродрома, дисплей будет показывать большое количество смоделированных вихревых следов, что приведет к трудности определения, какие из вихревых следов представляют для летательного аппарата реальную опасность и какие можно игнорировать.
Одним из наиболее перспективных путей повышения безопасности полета является предоставление пилоту в реальном масштабе времени прогнозируемого положения вихревых следов, попадание в которые может привести к летному происшествию.
Известна система предупреждения о турбулентности следа, предназначенная для размещения на борту летательных аппаратов, предусматривающая информирование экипажа летательного аппарата о потенциальном входе в вихревой след другого летательного аппарата только тогда, когда система определит, что вход указанного летательного аппарата в вихревой след другого летательного аппарата произойдет через определенный заданный промежуток времени (US, 6177888, А). При этом система предусматривает взаимодействие этих летательных аппаратов между собой, обмен предупреждающими сигналами и информацией о высоте полета, дистанции и пеленге, отслеживание траектории полета объема вихревого следа с учетом местной скорости ветра и имеет возможность определять расстояние или время до входа летательного аппарата в объем вихревого следа другого летательного аппарата. Система обеспечивает индикацию о близости к объему вихревого следа, когда расстояние или время до такого входа становится меньше заданного порога. При этом ширину и высоту объема вихревого следа вычисляют в каждой точке из множества точек вдоль траектории вихревого следа в виде функции расстояния от указанной точки до соседнего летательного аппарата.
Однако такая система не решает задачи информирования пилота о степени опасности попадания в выявленные вихревые следы и о рациональном маневре летательного аппарата для исключения попадания в вихревой след.
Кроме того, многообразие условий эксплуатации летательных аппаратов требует уменьшения дистанций между летательными аппаратами, например, при последовательном взлете или посадке летательных аппаратов на аэродромах, что является важным для увеличения пропускной способности аэродромов.
Достоверное знание положения и структуры вихревого следа и особенностей его воздействия на летательный аппарат в прогнозируемый момент времени будет способствовать удовлетворению противоречивых требований повышения эффективности выполнения летных задач и повышения безопасности полетов.
Известна система предупреждения столкновений с вихревым следом, устанавливаемая на каждом летательном аппарате для предупреждения пилота летательного аппарата о прогнозируемой опасности присутствия в окружающем летательный аппарат пространстве другого летательного аппарата (US, 6211808, B1), представляющая собой сферическую антенну, выполненную из диэлектрического материала, имеющую восемь секторов с установленными в них приемными устройствами для получения микроволновых сигналов, отраженных от других летательных аппаратов, находящихся в его окрестности. Однако такая система является дорогой и не предоставляет пилоту информацию о наличии опасных воздушных возмущений.
Известно техническое решение, касающееся схемы и способа предупреждения пересечения пути самолета с вихревым следом другого самолета (WO 00/71985), заключающееся в определении положения, конфигурации и вида вихревых возмущений, вызванных другим самолетом, присутствие которого обнаруживается с помощью информации от бортовых систем первого самолета, информации от другого самолета или информации с аэродрома, определение его высоты, предсказанного положения генерируемого им вихревого следа с учетом атмосферных условий, в частности, скорости и направления ветра, температуры воздуха, выверка полученных данных со справочной таблицей или моделирование вихревого следа с визуализацией положения и его траектории относительно первого самолета, предсказание точки пересечения траектории вихревого следа и пути движения первого самолета с вырабатыванием сигнала опасности в случае такого пересечения. В основном способ используется для обеспечения безопасности движения двух самолетов в зоне аэропорта и реализация его может приводить к увеличению высоты полета первого самолета над вторым самолетом. При этом используются система Traffic Collision Avoidance System. Однако при этом пилоту первого самолета визуализируется информация обо всех областях завихренности, предполагаемых в районе движения первого самолета из-за присутствия второго самолета, что не дает пилоту картины истинной опасности этих завихренностей для его полета.
Известно, что Национальная администрация по аэронавтике и космонавтике США (NASA) уделяет большое внимание повышению эффективности зоны аэродрома, в частности, при взлете и посадке летательных аппаратов, и одним из направлений разработок являются работы по созданию Системы определения вихревого интервала (AVOSS), которая будет объединять выходы различных систем и вырабатывать зависящие от погодных условий динамические критерии величин интервалов вихревых следов (37th Aerospace Sciences Meeting & Exhibit, January 11-14, 1999, Reno, NV, NASA Langly Research Center, Hampton, VA). Эти системы представляют текущие и прогнозируемые погодные условия, модели перемещения вихревого следа и его затухания в этих погодных условиях от поверхности земли до высоты посадочной или взлетной глиссады, а также осуществляют обратную связь поведения вихревых следов в реальном времени. Поведение следа сравнивают с определенными заранее размерами коридора безопасности и определением умирания следа, в результате чего находят искомые интервалы разделения для самолетов. Если следы продолжают существовать дольше, чем ожидалось, то уменьшение интервалов между взлетом самолетов или их посадкой запрещают. При этом поведение следа вычисляют на множестве «окон» захода на посадку от высоты глиссады до торца взлетно-посадочной полосы.
Однако в этой системе имеется ряд ограничений, таких, как отсутствие учета вертикального сдвига ветра, который может препятствовать опусканию следа или привести к его подъему, отсутствие учета конкретного масштаба турбулентности, необходимого для моделирования затухания следа и другие, которые могут привести к нештатной ситуации вследствие несоответствия заранее предоставленных диспетчеру вычисленных параметров следа фактическим параметрам следа.
Кроме того, применение системы AVOSS приведет к увеличению нагрузки на диспетчеров полетов, которые и в настоящих условиях испытывают значительные эмоционально-стрессовые нагрузки на фоне значительной интенсификации их труда, что является нежелательным, так как увеличивает возможность принятия диспетчером неадекватных решений.
Следует иметь в виду, что зарубежные системы безопасности в основном ориентированы на применение так называемых инструментальных правил полета, когда управление летательным аппаратом осуществляется на основе команд диспетчера полета, реализуемых в директорном или автоматическом режиме.
Однако известно, что в операторской деятельности наиболее сложным является принятие решения в экстремальной ситуации. Оно состоит из двух этапов: опознания ситуации и определения порядка действий по ее ликвидации. Перед выполнением каждого следующего действия оператор должен предвидеть свои последующие шаги. Восприятие визуальных или речевых сигналов в словесной форме из долговременной памяти, со средств отображения или на слух требует определенного времени в условиях дефицита времени. Время восприятия графических символов значительно меньше, опознание ситуации при индикации выделенных зон изображения позволяет также повысить адекватность принятия решения.
Кроме того, воздействие такого физического фактора, как ускорение, вызывает снижение мозгового кровообращения у пилота, что в условиях нервно-эмоционального перенапряжения может вызвать даже кратковременное отключение сознания. Поэтому предоставление пилоту или диспетчеру полета информации, необходимой для принятия решения, до наступления момента принятия решения и в графических символах является предпочтительным.
Раскрытие изобретения
Целью создания изобретения является разработка системы обеспечения безопасности полета летательного аппарата в условиях опасности попадания в зоны вихревых следов, генерируемых другими летательными, наземными, морскими подвижными и неподвижными объектами, находящимися в окрестности летящего летательного аппарата, в том числе, при его взлете или посадке.
При создании изобретения была поставлена задача разработки комплексной системы вихревой безопасности, включающей информирование пользователя о наличии в окрестности летательного аппарата генерируемых различными объектами вихревых следов, которые могут представлять опасность для летательного аппарата по критерию опасности, задаваемому пользователем системы, и геометрических параметрах их опасных зон, попадание в которые летательного аппарата по истечении некоторого времени после такого информирования может привести к летному происшествию, и побуждения пилота или других пользователей, имеющих возможность влияния на режимы полета летательного аппарата, к формированию управляющего сигнала, обеспечивающего выполнение летательным аппаратом маневра уклонения от попадания в опасные зоны вихревых следов.
Поставленная задача была решена разработкой интегрированной системы вихревой безопасности летательного аппарата, включающей:
- подсистему информации о летательном аппарате, способную фиксировать, сохранять и предоставлять пользователям информацию о летательном аппарате в пространстве;
- подсистему информации о генераторах вихревого следа, способную фиксировать, сохранять и предоставлять пользователям информацию о генераторах вихрей в области нахождения летательного аппарата;
- подсистему информации об окружающей среде, способную фиксировать, сохранять и предоставлять пользователям информацию о состоянии окружающей среды в области нахождения летательного аппарата в текущий момент времени и в прогнозируемый момент времени;
- подсистему предупреждения пользователей о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей в прогнозируемый момент выбранного пользователем времени упреждения;
- подсистему пользователя, способную, по меньшей мере, принимать, сохранять и отображать для пользователя информацию, поступающую от других подсистем, и формировать сигнал, предписывающий выполнение летательным аппаратом маневра, обеспечивающего уклонение летательного аппарата от опасной зоны вихревых следов генераторов вихрей в течение выбранного пользователем времени упреждения после получения пользователем предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей в прогнозируемый момент времени;
- коммуникационную подсистему, обеспечивающую интеграцию подсистем в единый комплекс.
При этом согласно изобретению в интегрированной системе:
- подсистема информации о летательном аппарате обеспечивает прием, обработку, хранение и передачу подсистеме предупреждения пользователей, по меньшей мере, информации о конфигурации, координатах и ориентации летательного аппарата в инерциальной системе координат, о проекциях скорости летательного аппарата и проекциях угловой скорости в связанной с летательным аппаратом системе координат;
- подсистема информации о генераторах вихревых следов обеспечивает прием, обработку, хранение и передачу пользователю, по меньшей мере, информации о типах генераторов вихрей, их координатах и ориентации, проекциям скорости и угловой скорости в инерциальной системе координат;
- подсистема информации об окружающей среде обеспечивает прием, обработку, хранение и передачу пользователю, по меньшей мере, информации о проекциях скорости ветра в инерциальной системе координат на различных высотах в области локализации вихревых следов, степени турбулентности атмосферы;
- подсистема предупреждения пользователя о возможности попадания летательного аппарата в опасные зоны вихревых следов генераторов вихрей осуществляет, по меньшей мере, расчет положения, интенсивности и опасных зон вихревых следов генераторов вихрей, области прогнозируемых положений летательного аппарата в прогнозируемый момент времени и направляет подсистеме пользователя информацию о возможном попадании летательного аппарата в опасные зоны вихревых следов генераторов вихрей в прогнозируемый момент времени;
- подсистема пользователя осуществляет прием, обработку, хранение и отображение с помощью средств индикации и визуализации информации от подсистемы предупреждения, по меньшей мере, о наступлении в прогнозируемый момент времени события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей и формирует предписывающий сигнал изменения положения летательного аппарата, обеспечивающего увеличение указанного расстояния;
Кроме того, согласно изобретению в интегрированной системе целесообразно, чтобы:
- подсистема информации о летательном аппарате была реализована на основе штатного бортового оборудования летательного аппарата и/или оборудования наземного, морского и/или авиационно-космического навигационных комплексов;
- подсистема информации о генераторах вихревого следа была реализована на основе штатного бортового оборудования летательного аппарата и/или штатного оборудования генератора вихрей, и/или оборудования системы управления воздушным движением наземного, морского и/или авиационно-космического навигационных комплексов;
- подсистема информации об окружающей среде была реализована на основе штатного бортового оборудования летательного аппарата и/или на основе штатного оборудования метеорологического обеспечения системы управления воздушным движением или оборудования в составе наземного, морского и/или авиационно-космического навигационных комплексов;
- подсистема предупреждения пользователя о возможности попадания летательного аппарата в опасные зоны вихревых следов генераторов вихрей была реализована на основе программного обеспечения вычислительных систем пользователя и/или бортовых систем единой индикации и/или систем индикации диспетчерских служб управления воздушным движением или оборудования в составе наземного, морского и/или авиационно-космического навигационных комплексов в месте размещения диспетчера полета;
- подсистема пользователя была реализована на основе программного обеспечения вычислительных систем пользователя и устройств визуализации и индикации в составе штатного бортового оборудования летательного аппарата и/или наземного или морского навигационного комплекса в месте размещения диспетчера полета;
- коммутационная подсистема была реализована на основе систем телекодовой связи и/или бортовых мультиплексных каналов информационного обмена.
При этом, согласно изобретению в интегрированной системе пользователем может быть летательный аппарат, и реализация предписывающего сигнала может быть осуществлена экипажем или системой автоматического управления летательного аппарата.
Кроме того, согласно изобретению в интегрированной системе пользователем может быть диспетчерская служба управления воздушным движением, предписывающий сигнал передают экипажу летательного аппарата, и реализация сигнала может бить осуществлена экипажем или системой автоматического управления летательным аппаратом.
При этом, согласно изобретению, целесообразно, чтобы интегрированная система в качестве подсистемы предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей в прогнозируемый момент времени содержала подсистему, включающую:
- устройство слежения за параметрами летательного аппарата, способное принимать информацию о конфигурации, положении, координатах и ориентации летательного аппарата относительно инерциальной системы координат в текущий момент времени;
- устройство слежения за генератором вихрей, способное принимать информацию о положении, геометрических и массовых характеристиках генератора вихрей относительно той же системы координат в текущий момент времени, и о параметрах его движения;
- запоминающее устройство, способное сохранять информацию о положении и параметрах движения генератора вихрей в инерциальной системе координат;
- детектор параметров среды, способный принимать информацию о параметрах окружающей среды в области совместного размещения летательного аппарата и генератора вихрей в текущий момент времени;
- устройство слежения за вихревым следом, способное определять траекторию и интенсивность вихревого следа генератора вихрей как совокупности траекторий центров областей завихренности, в инерциальной системе координат;
- запоминающее устройство, способное сохранять информацию о координатах точек траектории и интенсивности следа генератора вихрей как совокупности траекторий центров областей завихренности, в инерциальной системе координат;
- устройство выбора времени упреждения, в течение которого, по меньшей мере, возможно выполнение маневра изменения траектории полета летательного аппарата, обеспечивающего уклонение летательного аппарата от вихревого следа генератора вихрей после предупреждения о возможности попадания в него;
- устройство моделирования контрольной плоскости, способное вычислять упреждающее расстояние, равное расстоянию, преодолеваемому летательным аппаратом за время упреждения, формировать контрольную плоскость, расположенную в пространстве перед летательным аппаратом перпендикулярно направлению его движения на упреждающем расстоянии от него, и определять прогнозируемый момент времени пролета летательного аппарата через контрольную плоскость в инерциальной системе координат;
- устройство определения параметров опасной зоны, способное определять геометрические характеристики опасной зоны вихревого следа генератора вихрей как совокупности опасных зон областей завихренности, генерируемых генератором вихрей, в прогнозируемый момент времени;
- устройство прогнозирования, способное определять траекторию вихревого следа генератора вихрей как совокупность траекторий центров областей завихренности, генерируемых генератором, и интенсивность вихревого следа относительно инерциальной системы координат в прогнозируемый момент времени;
- устройство вычисления точек пересечения, способное определять координаты точек пересечения траектории вихревого следа генератора вихрей с контрольной плоскостью в прогнозируемый момент времени пересечения летательным аппаратом указанной контрольной плоскости;
- устройство формирования зон и областей, обеспечивающее: формирование вокруг точки пересечения траектории вихревого следа с контрольной плоскостью опасной зоны вихревого следа, как совокупности опасных зон областей завихренности, генерируемых генератором, при попадании в которую у летательного аппарата параметры движения могут превысить допустимые пределы; формирование в указанной контрольной плоскости области прогнозируемых с учетом установленных нормативов производства полета положений летательного аппарата в прогнозируемый момент пересечения летательным аппаратом контрольной плоскости; формирование вокруг области прогнозируемых положений область повышенного внимания, информация о попадании в которую опасной зоны вихревого следа должна быть предоставлена пользователю;
- блок перехода, способный вычислять координаты области прогнозируемых положений летательного аппарата, области повышенного внимания и опасной зоны вихревого следа в системе координат, связанной с летательным аппаратом;
- первый блок проверки условия пересечения, способный определять расстояние от области повышенного внимания до опасной зоны вихревого следа и фиксировать момент его равенства нулю;
- второй блок проверки условия пересечения, способный определять расстояние от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа и фиксировать момент его равенства нулю;
- первое сигнальное устройство, обеспечивающее формирование и передачу подсистеме пользователя сигнала о наступлении события равенства нулю расстояния от области повышенного внимания до опасной зоны вихревого следа генератора вихрей;
- второе сигнальное устройство, обеспечивающее формирование и передачу подсистеме пользователя аварийного сигнала о наступлении события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей.
При этом, согласно изобретению целесообразно, чтобы в интегрированной системе:
- устройство слежения за параметрами летательного аппарата было способно принимать информацию, по меньшей мере, о конфигурации, координатах, скорости перемещения, углах тангажа, рыскания и крена летательного аппарата;
- устройство слежения за генератором вихрей было способно принимать информацию, по меньшей мере, о типе генератора вихрей, скорости его перемещения, угловой скорости и координатах точек его траектории;
- детектор параметров среды был способен принимать информацию, по меньшей мере, о величине и направлении локальной скорости ветра, профиле ветра по высоте, степени турбулентности, типе подстилающей поверхности;
- устройство слежения за вихревым следом было способно определять траекторию и интенсивность вихревого следа генератора вихрей как совокупности траекторий центров областей завихренности на основе сохраненной информации о типе генератора вихрей, координатах точек его траектории, скорости перемещения и угловой скорости;
- устройство моделирования контрольной плоскости было способно моделировать контрольную плоскость на основе информации о местонахождении, ориентации и скорости перемещения летательного аппарата и величине времени упреждения;
- устройство определения параметров опасной зоны было способно определять геометрические характеристики опасной зоны вихревого следа генератора вихрей на основе сохраненной информации о координатах точек траектории и интенсивности следа генератора вихрей, информации о конфигурации, положении, скорости перемещения и угловой скорости летательного аппарата в инерциальной системе координат;
- устройство прогнозирования было способно определять траекторию вихревого следа генератора вихрей и интенсивность вихревого следа на основе информации о траектории и интенсивности вихревого следа как совокупности траекторий центров областей завихренности, генерируемых генератором вихрей, в инерциальной системе координат;
- устройство вычисления точек пересечения было способно определять координаты точек пересечения траектории вихревого следа генератора вихрей с контрольной плоскостью на основе информации о координатах контрольной плоскости, траектории вихревого следа в инерциальной системе координат в прогнозируемый момент времени;
- устройство формирования зон и областей было способно формировать опасную зону вихревого следа, область прогнозируемых положений летательного аппарата, область повышенного внимания на основе информации о координатах точек пересечения вихревого следа генератора вихрей в прогнозируемый момент времени, информации о геометрических характеристиках опасной зоны как совокупности опасных зон областей завихренности, генерируемых генератором вихрей, информации о конфигурации, положении, ориентации, скорости перемещения и угловой скорости летательного аппарата с учетом установленных нормативов производства полета в инерциальной системе координат;
- блок перехода способен вычислять координаты области прогнозируемых положений летательного аппарата, области повышенного внимания и опасной зоны вихревого следа в системе координат, связанной с летательным аппаратом, на основе информации о координатах области повышенного внимания, области прогнозируемых положений и опасной зоны вихревого следа в прогнозируемый момент времени в инерциальной системе координат и информации о конфигурации, координатах летательного аппарата и его положении, предпочтительно, углах тангажа, рыскания и крена, в инерциальной системе координат в текущий момент времени.
Кроме того, разумно, чтобы в интегрированной системе согласно изобретению подсистема предупреждения содержала устройство слежения за генератором вихрей, запоминающие устройства, устройство слежения за вихревым следом, устройство определения параметров опасной зоны, устройство прогнозирования, устройство вычисления точек пересечения, устройство формирования зон и областей, блок перехода, первый и второй блоки проверки условия пересечения и сигнальные устройства, способные одновременно обеспечить выполнение своих функций в отношении каждого из генераторов вихрей, находящихся в окрестности летательного аппарата.
При этом желательно, чтобы в интегрированной системе согласно изобретению в подсистеме предупреждения устройство выбора времени упреждения было выполнено с возможностью осуществления текущей коррекции времени упреждения.
Кроме того, желательно, чтобы в подсистеме предупреждения интегрированной системы согласно изобретению устройство формирования зон и областей было выполнено с возможностью осуществления текущей коррекции координат области прогнозируемых положений летательного аппарата.
Кроме того, согласно изобретению, желательно, чтобы в подсистеме предупреждения интегрированной системы устройство формирования зон и областей было выполнено с возможностью осуществления текущей коррекции координат области повышенного внимания.
При этом, согласно изобретению желательно, чтобы текущая коррекция времени упреждения, текущая коррекция координат области прогнозируемых положений и текущая коррекция области повышенного внимания могла быть осуществлена в режиме ручного регулирования.
Кроме того, согласно изобретению целесообразно, чтобы указанная коррекция могла быть осуществлена в полуавтоматическом или автоматическом режиме.
Кроме того, целесообразно, чтобы в интегрированной системе безопасности подсистема пользователя содержала устройство визуализации для пользователя информации о расположении в контрольной плоскости области прогнозируемых положений летательного аппарата и опасных зон вихревых следов генераторов вихрей.
Кроме того, желательно, чтобы в интегрированной системе подсистема пользователя содержала устройство индикации и устройство аварийной индикации, выбранные из группы, включающей устройства визуальной, аудио- и тактильной индикации.
При этом, согласно изобретению, целесообразно, чтобы в интегрированной системе подсистема предупреждения в качестве устройства определения параметров опасной зоны вихревого следа генератора вихрей содержала устройство, включающее:
- блок схематизации летательного аппарата, способный вычислять совокупность геометрических характеристик летательного аппарата, необходимых для расчета действующих на него дополнительных аэродинамических сил и моментов, индуцированных вихревым следом генератора вихрей;
- блок определения дополнительных действующих на летательный аппарат в заданной точке пространства аэродинамических сил и моментов, индуцированных вихревым следом генератора вихрей, способный вычислять их на основе сохраненной информации о координатах точек траекторий центров завихренности и интенсивности следа генератора вихрей как совокупности траекторий центров областей завихренности в инерциальной системе координат, информации о конфигурации, положении, скорости перемещения и угловой скорости летательного аппарата в инерциальной системе координат и геометрических характеристиках летательного аппарата;
- блок определения опасности аэродинамических возмущений в заданной точке пространства, способный производить оценку опасности возмущений по критерию опасности, установленному пользователем;
- блок определения множества точек пространства, в которых дополнительные аэродинамические силы и моменты, индуцированные вихревым следом генератора вихрей, являются опасными, способный определять координаты точек пространства, принадлежащих опасной зоне, на основе отбора их по критерию опасности, установленному пользователем;
- блок определения геометрических характеристик опасной зоны вихревого следа, способный вычислять их на основе информации о координатах точек, принадлежащих опасной зоне.
При этом, согласно изобретению в подсистеме предупреждения в устройстве определения параметров опасной зоны блок определения геометрических характеристик опасной зоны вихревого следа способен аппроксимировать границу опасной зоны.
При этом, согласно изобретению целесообразно, чтобы в интегрированной системе в качестве критерия опасности вихревого следа генератора вихрей была выбрана допустимая величина крена летательного аппарата.
Кроме того, согласно изобретению в интегрированной системе безопасности в качестве критерия опасности вихревого следа генератора вихрей может быть выбран момент крена, индуцируемый вихревым следом генератора вихрей на летательном аппарате.
При этом, согласно изобретению целесообразно, чтобы в интегрированной системе в подсистеме предупреждения устройство слежения за вихревым следом и устройство прогнозирования содержали программируемый компонент, а устройство определения параметров опасной зоны было реализовано в программном обеспечении программируемого компонента.
При этом, согласно изобретению в интегрированной системе устройства и блоки подсистемы предупреждения и подсистемы пользователя могут иметь различную локализацию.
Кроме того, согласно изобретению интегрированная система в подсистеме пользователя может содержать систему сохранения информации, по меньшей мере, о величине времени упреждения, координатах контрольной плоскости, области прогнозируемых положений летательного аппарата и опасных зон генераторов вихрей системы предупреждения, по меньшей мере, в течение времени аварийной индикации события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей.
Краткое описание чертежей
В дальнейшем изобретение поясняется примером его осуществления и прилагаемыми чертежами, на которых:
фиг.1 - схема информационных потоков интегрированной системы вихревой безопасности летательного аппарата согласно изобретению, вариант;
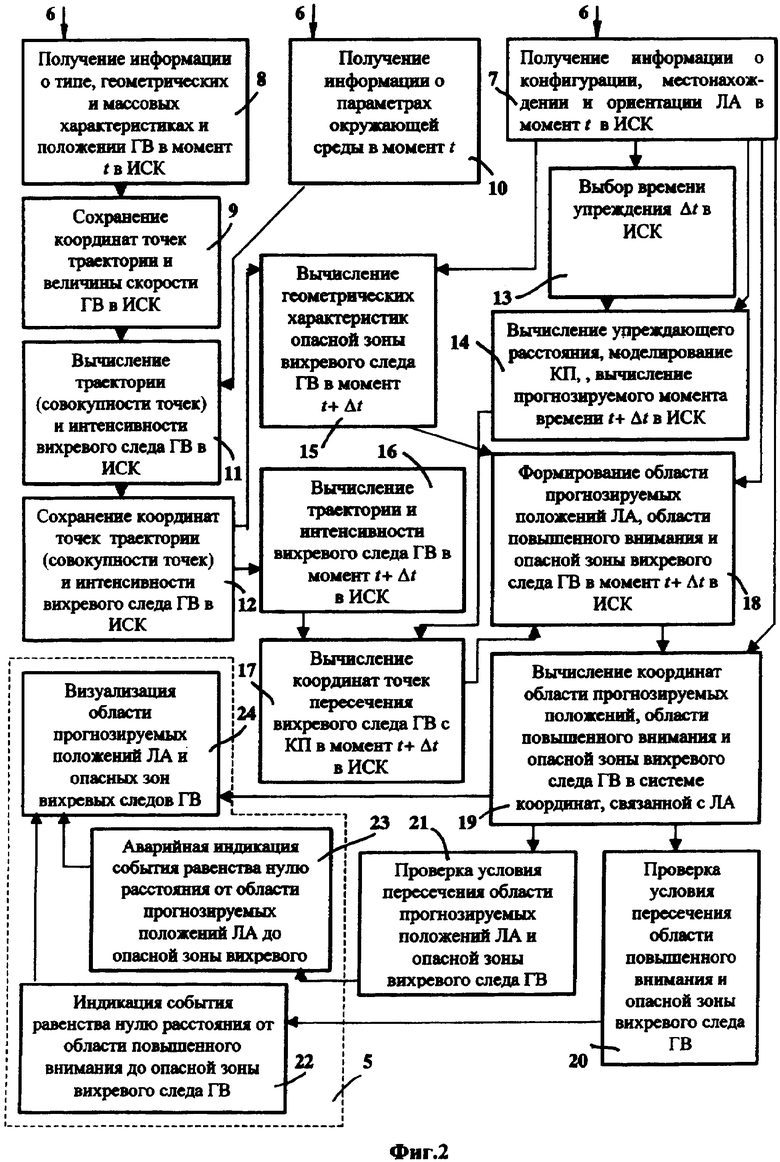
фиг.2 - схема реализации подсистемы предупреждения пользователей о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей во взаимодействии с частью подсистемы пользователя согласно изобретению, вариант;
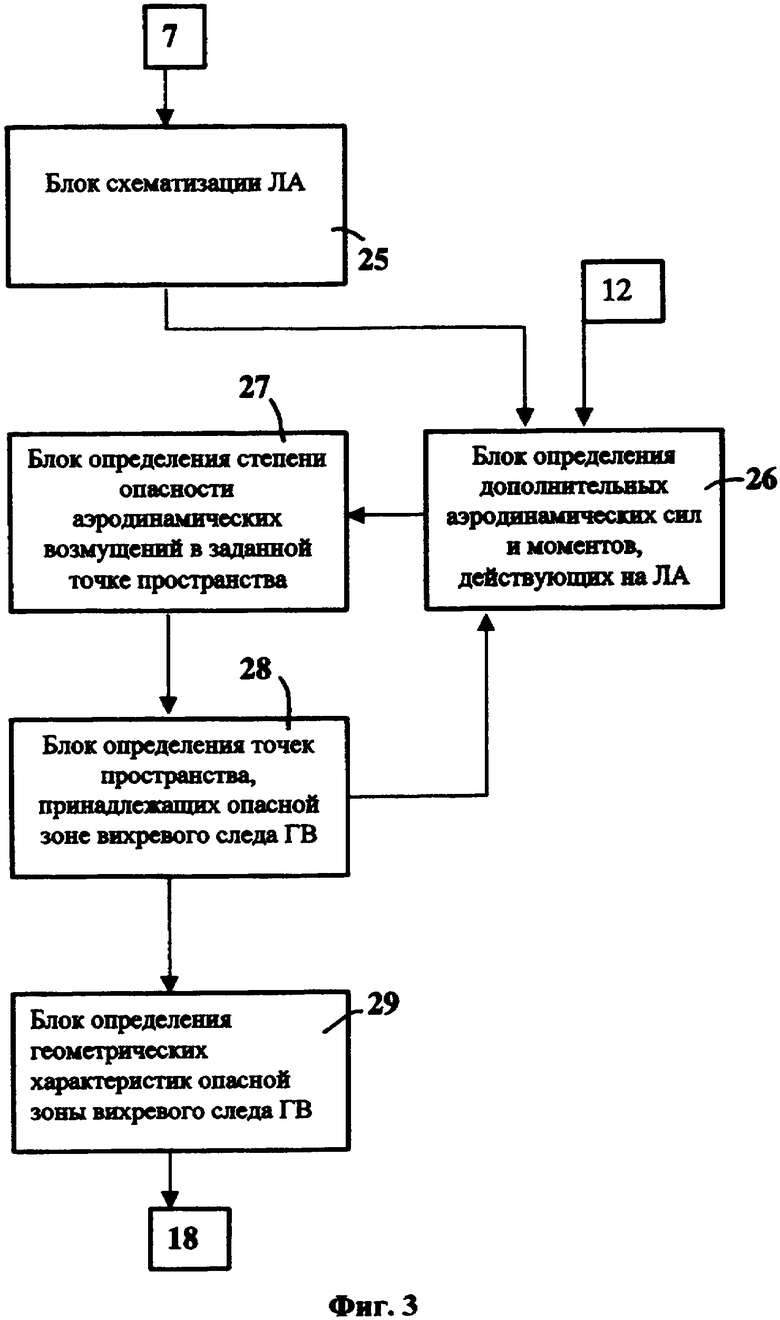
фиг.3 - схема выполнения устройства определения геометрических характеристик опасной зоны вихревого следа согласно изобретению, вариант;
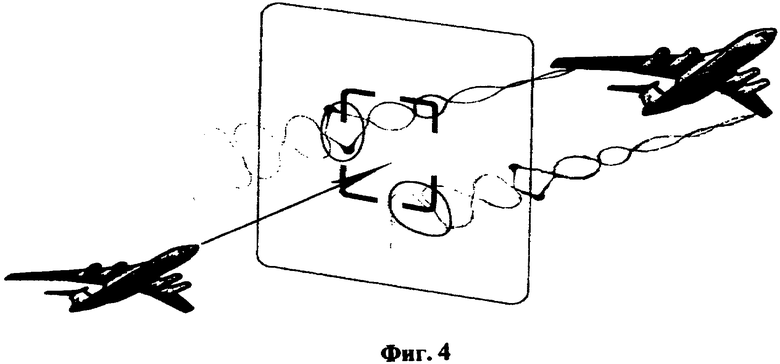
фиг.4 - схема реализации интегрированной системы вихревой безопасности согласно изобретению, вариант;
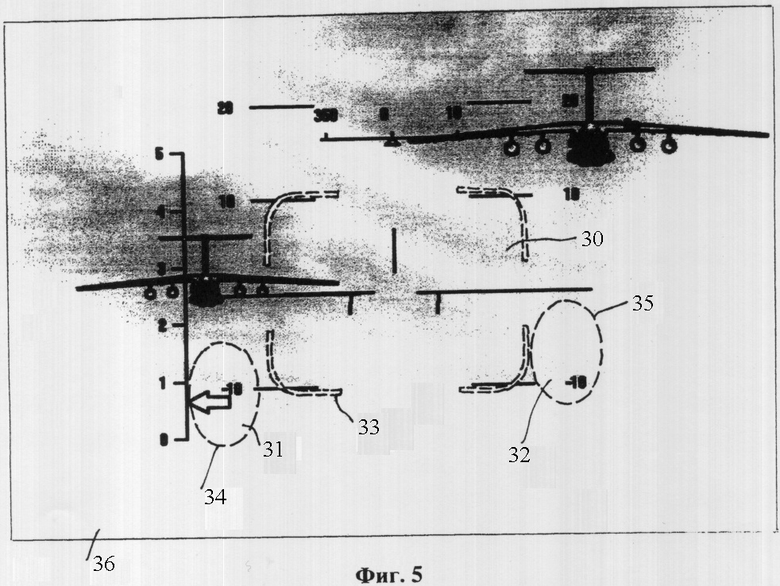
фиг.5 - схематичное изображение информации, визуализированной в подсистеме пользователя согласно изобретению, вариант.
Лучший вариант осуществления изобретения
Изобретение может быть проиллюстрировано не ограничивающим его применение вариантом реализации, схема которого представлена на Фиг.1 для случая, когда пользователем является летательный аппарат (далее - ЛА) в режиме полета по маршруту в окрестности аэродрома, и его окрестности в полете находится другой ЛА, являющийся генератором вихрей (далее - ГВ). При этом ЛА оборудован бортовым пилотажно-навигационным комплексом, который обеспечивает измерение навигационно-пилотажных параметров собственного ЛА и других объектов и объединяет подсистемы, которые дополняют и корректируют друг друга: радиосистемы ближней и дальней навигации, радиомаячную систему, спутниковую систему навигации, доплеровскую систему измерения путевой скорости и угла сноса, инерционную систему, радиолокационную систему, оптоэлектронную систему и лазерный дальномер, радиовысотомер, систему воздушных сигналов, датчики углов атаки и скольжения, перегрузок, угловых скоростей, гировертикаль, систему межсамолетной навигации, бортовую систему единой индикации ЛА и содержит вычислительный комплекс, устройства индикации, сигнализации и визуализации информации, например, индикатор на лобовом стекле и/или дисплей.
Навигационное оборудование аэродрома представляет собой, например, комплекс, содержащий международную радиотехническую систему ближней навигации типа VOR/DME (VOR - радиомаяк измерения азимута, DME - радиомаяк измерения дальности), являющуюся стандартной для обеспечения полетов на зарубежных международных трассах и предназначенной для непрерывного автоматического определения местоположения ЛА (установленные нормы системы: дальность действия системы до 370 км, зона действия 0-40°), автоматического радиопеленгатора для индикации азимута ЛА, например, типа АРП-7С, и приводной радиостанции, например, типа АПР-8, предназначенной для обеспечения полетов ЛА, оборудованных автоматическими радиокомпасами.
На Фиг.1 показана схема информационных потоков интегрированной системы вихревой безопасности летательного аппарата согласно изобретению вариант, когда подсистема 1 информации об ЛА, подсистема 2 информации о генераторе вихрей (далее ГВ) и подсистема 3 информации об окружающей среде реализованы в указанном пилотажно-навигационном комплексе и, частично, на основе оборудования аэродрома, и фиксируют, сохраняют и предоставляют другим подсистемам интегрированной системы вихревой безопасности согласно изобретению информацию об углах атаки и скольжения, угловых скоростях вращения ЛА вокруг связанных осей координат, отклонения управляющих органов, режиме работы двигателей, перегрузках вдоль связанных осей координат, углах ориентации ЛА в связанной системе координат, информацию о конфигурации ЛА, приборной скорости, ускорении, углах ориентации вектора скорости в инерциальной системе координат, координатах положения ЛА в пространстве, радиолокационную информацию о метеорологической обстановке, типе подстилающей поверхности, положении ГВ в пространстве, а также полученную от наземных пунктов аэродрома по радиолиниям информацию, например, о положении других ГВ в пространстве, их форме и габаритах, скоростях и ориентации, профиле скорости ветра по высоте, типе ГВ, координатах точек его траектории, его геометрических и массовых характеристиках.
Подсистема 4 предупреждения пользователя о возможности попадания летательного аппарата в опасную зону вихревого следа ГВ реализована на основе пилотажно-навигационного комплекса и вычислительной системы ЛА, подсистема 5 пользователя реализована на основе вычислительной системы ЛА, устройств индикации и визуализации информации, например индикатора на лобовом стекле и/или дисплея, а коммутационная подсистема 6 реализована на основе бортовых мультиплексных каналов информационного обмена.
Согласно изобретению подсистема 4 предупреждения пользователя и часть подсистемы 5 пользователя, включающая систему визуализации, выполнены согласно схеме, изображенной на Фиг.2. Подсистема 4 предупреждения на основе полученной информации от подсистем 1, 2 и 3 вычисляет траектории вихревых следов, находящихся в окрестности ЛА, как совокупность точек траектории центров областей завихренности в пространстве, определяет геометрические характеристики зон вихревого следа ГВ, удовлетворяющих критерию опасности, установленному пользователем, например, величиной угла крена ЛА под прогнозируемым воздействием вихревого следа на ЛА в прогнозируемый момент времени пересечения ЛА некоторой моделированной контрольной плоскости, расположенной в пространстве впереди ЛА перпендикулярно направлению его движения на упреждающем расстоянии от ЛА, формирует в контрольной плоскости информацию о взаимном прогнозируемом расположении ЛА и опасных зон вихревых следов, определяет степень их опасности для ЛА и отслеживает в текущем режиме расстояние между опасной зоной и ЛА.
Подсистема 5 пользователя информирует пилота о прогнозируемом событии попадания в опасную зону с помощью звуковой, тактильной или визуальной индикации и обеспечивает визуализацию этой информации для пользователя, формируя предписывающий сигнал, например, звуковой. В случае размещения подсистемы 5 пользователя также и в месте размещения диспетчера полетов, эта информация может быть продублирована, что позволяет диспетчеру сконцентрировать свое внимание на разрешении создавшейся полетной ситуации.
Согласно схеме Фиг.2, в описываемой подсистеме 4 предупреждения устройство 7 слежения за параметрами ЛА принимает через коммуникационную подсистему 6 информацию от подсистемы 1 информации об ЛА, в частности, согласно изобретению информацию о конфигурации, координатах, скорости перемещения, угловой скорости ЛА, углах тангажа, рыскания и крена в текущий момент времени t в инерциальной системе координат (далее ИСК).
Устройство 8 слежения за ГВ принимает через коммуникационную подсистему 6 от подсистемы 2 информации о генераторах вихревого следа, а запоминающее устройство 9 сохраняет информацию о типе ГВ, скорости его перемещения, угловой скорости и координатах точек его траектории в ИСК.
Детектор 10 параметров среды принимает через коммуникационную подсистему 6 от подсистемы 3 информации об окружающей среде, например, от системы воздушных сигналов СВС или от диспетчера полета, информацию о величине и направлении локальной скорости ветра, профиле ветра по высоте, степени турбулентности, типе подстилающей поверхности в области совместного размещения ЛА и ГВ, относительно ИСК в текущий момент времени t.
Устройство 11 слежения за вихревым следом на основе информации от запоминающего устройства 9 вычисляет траекторию и интенсивность вихревого следа ГВ как совокупность траекторий центров областей завихренности в ИСК, например, с помощью алгоритмов, таких, как алгоритм, являющийся объектом «know-how» авторов изобретения, или, например, с использованием известного алгоритма вычисления траектории и интенсивности вихревого следа (Northwest Research Associates, Inc., Aircraft Vortex Spacing System (AVOSS), Algorithm Version 3.1.1), обеспечивающего вычисление координат центров областей завихренности на основе интегрирования дифференциального уравнения, описывающего эволюцию областей завихренности в пространстве и времени, или других алгоритмов, обеспечивающих указанные вычисления. Запоминающее устройство 12 сохраняет эти данные. Параметры координат областей завихренности также могут быть определены с помощью инструментальных измерений, например, с помощью лазерных радиолокационных устройств типа лидар, измерений и оценкой величины тангенциальных скоростей воздушного потока с последующим вычислением траектории и интенсивности вихревого следа. Устройство 13 осуществляет выбор времени упреждения, необходимого для выполнения маневра по изменению траектории ЛА. Это время упреждения согласно изобретению может быть откорректировано в текущем режиме с помощью ручного регулирования, полуавтоматического или автоматического регулирования с учетом, например, квалификации пилота или особенностей поставленной полетной задачи. Устройство 14 моделирования контрольной плоскости (далее - КП) на основе информации от устройства 7 о координатах, скорости перемещения, углах тангажа, рыскания и крена ЛА и информации от устройства 13 о выбранной величине времени упреждения Δt моделирует КП, расположенную в пространстве перед ЛА перпендикулярно направлению его движения на расчетном упреждающем расстоянии от ЛА, например, в виде коэффициентов уравнения плоскости КП в ИСК, и определяет прогнозируемый момент времени t+Δt пролета ЛА через КП в ИСК. В качестве устройства 14 может быть использовано любое вычислительное устройство, позволяющее производить такие вычисления, например компьютер на борту ЛА. Устройство 15 прогнозирования на основе информации о траектории и интенсивности вихревого следа ГВ, сохраненной в устройстве 12, и прогнозируемом моменте времени от устройства 14 моделирования вычисляет координаты траектории и интенсивность вихревого следа ГВ как совокупности траекторий центров областей завихренности в прогнозируемый момент времени в ИСК. Устройство 16 определения параметров опасной зоны на основе информации от устройства 7 о координатах, скорости перемещения и угловой скорости ЛА и от запоминающего устройства 12 о координатах точек траектории и интенсивности вихревого следа как совокупности траекторий центров областей завихренности, генерируемых ГВ, определяет в соответствии с выбранным критерием опасности геометрические характеристики опасной зоны вихревого следа ГВ как совокупности опасных зон областей завихренности, генерируемых ГВ, в прогнозируемый момент времени t+Δt. При этом в качестве критерия опасности согласно изобретению может быть выбрана допустимая величина угла крена ЛА или, например, допустимая величина момента крена, индуцируемого вихревым следом ГВ.
При этом согласно изобретению устройство 11 слежения за вихревым следом и устройство 15 прогнозирования могут содержать программируемый компонент, например траекторию и интенсивность вихревого следа ГВ, а устройство 16 может быть реализовано в программном обеспечении этого компонента - базе данных о рассчитанных геометрических характеристиках опасных зон вихревых следов различных типов ГВ в зависимости от различных условий окружающей среды и параметров движения ГВ, аэродинамических сил и моментов, индуцированных на ЛА вихревыми следами различной интенсивности, например моментов крена.
Устройство 17 (Фиг.2), реализованное, например, в компьютере бортовой пилотажно-навигационной системы, на основе информации о координатах КП вычисляет координаты точек пересечения траектории вихревого следа ГВ с КП в прогнозируемый момент времени t+Δt на основе информации о координатах КП от устройства 14 и информации от устройства 15 о траектории вихревого следа, например, путем выбора точек траектории вихревого следа, расположенных по разные стороны КП, с интерполяцией расстояния между ними.
Устройство 18 формирования зон и областей, например, в составе компьютера бортовой инерциальной навигационной системы ЛА, формирует вокруг точки пересечения траектории вихревого следа ГВ с КП опасную зону вихревого следа, область прогнозируемых с учетом установленных нормативов производства полета положений летательного аппарата (далее ОПП ЛА) в прогнозируемый момент времени t+Δt и область повышенного внимания (далее ОПВ), как совокупность множества точек на контрольной плоскости. Согласно изобретению устройство 12 позволяет осуществлять текущую коррекцию координат ОПП ЛА и ОПВ, что является важным для пилота при координировании маневра уклонения с ситуацией выполнения полетного задания.
Блок перехода 19 вычисляет координаты ОПП ЛА опасной зоны вихревого следа ГВ и ОПВ в связанной с ЛА системе координат.
Затем первый блок 20 проверки условия пересечения вычисляет расстояние от ОПВ до опасной зоны вихревого следа, отслеживая событие равенства его нулю, а второй блок 21 проверки условия пересечения вычисляет расстояние от ОПП до опасной зоны вихревого следа ГВ, отслеживая событие равенства его нулю.
Информация о равенстве нулю в прогнозируемый момент времени указанных расстояний поступает в подсистему 5 пользователя в устройства индикации 22 и 23, например, в устройство 22 аудио-индикации в случае равенства нулю расстояния между областью ОПВ и опасной зоной вихревого следа, а затем, например, в устройство 23 аварийной тактильной индикации для пилота в случае равенства нулю расстояния между ОПП ЛА и опасной зоной вихревого следа. Тактильная индикация призвана побудить пилота к принятию срочных мер для выполнения маневра уклонения ЛА от опасной зоны. При этом в распоряжении пилота есть время для маневра, вычисляемое устройством 14 моделирования КП с учетом скорости перемещения ЛА и упреждающего расстояния. В зависимости от складывающейся ситуации после получения сигнала первой индикации от устройства 22 величина времени упреждения может быть пилотом скорректирована, например, с помощью ручного регулирования установлением дискретного значения, полуавтоматического регулирования с переходом на другое значение или автоматического регулирования в случае установления критерия - условия изменения этого времени в сторону увеличения или уменьшения.
С увеличением указанных расстояний индикация прекращается.
Целесообразно, согласно изобретению визуализировать для пользователя информацию о взаимном расположении ОПП ЛА и опасной зоны в КП в прогнозируемый момент времени в устройстве 24 визуализации, например, на дисплее, индикаторе лобового стекла или навигационной карте ЛА, а также для ограничения объема информации, не являющейся актуальной для пилота, визуализировать положение опасных зон только после пересечения их с ОПВ.
Согласно изобретению устройство 16 определения параметров опасной зоны может быть выполнено согласно изобретению и содержать, как показано на схеме Фиг.3, блок 25 схематизации ЛА, принимающий информацию от устройства 7 подсистемы 4 предупреждения, выполненный любым известным образом и вычисляющий совокупность геометрических характеристик ЛА с учетом его конфигурации, блок 26, принимающий информацию от блока 25 и информацию от устройства 12 подсистемы 4 предупреждения и определяющий дополнительные аэродинамические силы и моменты, индуцированные вихревым следом ГВ в точке пространства. Затем блок 27 определяет на основе заданного критерия опасности степень опасности аэродинамических возмущений в заданной точке пространства, блок 28 определяет точки пространства, принадлежащие опасной зоне вихревого следа, а блок 29 определяет геометрические характеристики опасной зоны как совокупности точек и осуществляет аппроксимацию границ опасной зоны для упрощения визуализации опасной зоны на дисплее. Информация о параметрах опасной зоны вихревого следа ГВ затем поступает в устройство 18 системы предупреждения и визуализируется в случае опасности попадания в нее ЛА.
На Фиг.4 показано схематично расположение контрольной плоскости, смоделированной в подсистеме 4 предупреждения пользователей, размещенной, например, на ЛА, и вихревых следов ГВ. Однако подсистема 4 может быть расположена и в месте расположения диспетчера полета, например, на аэродроме или корабле, а пилоту может быть только предоставлена только информация, визуализированная на бортовых устройствах визуализации.
На Фиг.5 схематично показана информация, визуализируемая на дисплее навигационной карты, который обычно применяется в ЛА для индикации курса ЛА и для изображения символов, генерируемых бортовой инерпиальной навигационной системой например, системой Airborne Inertial Navigation System (AINS), с изображением области 30 прогнозируемых положений ЛА (ОПП ЛА) и опасных зон 31, 32 вихревых следов ГВ в пространстве в прогнозируемый момент времени. Область 30 ОПП ЛА может иметь вид, например, прямоугольника, размеры которого пропорциональны габаритам области возможного положения корпуса ЛА в пространстве. Границы области 33 повышенного внимания на дисплее не показаны, так как, согласно изобретению, целесообразно, чтобы изображение опасных зон вихревых следов проецировалось на дисплее только в том случае, если опасные зоны 31, 32 пересекаются с областью повышенного внимания 33, одновременно с индикацией, например, звуковой, этого события. Опасные зоны 31, 32 вихревых следа могут иметь вид, например, круга или другой удобной для зрительного восприятия геометрической фигуры. При этом изображение может сопровождаться визуальной индикацией, например, световой или цветной, самих областей или границ 33, 34, 35 соответственно, области 30 ОПП ЛА и опасных зон 31, 32 вихревых следов.
Согласно изобретению целесообразно сохранять текущую информацию о величине выбранного времени упреждения, координатах контрольной плоскости, области прогнозируемых положений летательного аппарата и опасных зон вихревых следов генераторов вихрей в течение времени аварийной индикации события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей. Это сохранение может быть обеспечено с помощью, например, отдельного устройства сохранения информации (не показано), размещенного как на борту, например, в системе записи информации так называемого «черного ящика», так и в составе наземных, надводных, космических средств контроля за воздушным движением. Наличие такой информации позволит осуществлять мероприятия по установлению причин авиакатастроф для целей оценки действий пилота ЛА в ситуации наличия в окружающем его пространстве вихревых следов, попадание в опасные зоны которых могли привести, например, к изменению конфигурации ЛА или изменению его траектории.
Разумеется, хотя в описанном примере представлен лишь один из генераторов вихрей и визуализируется и индуцируется поведение лишь одной опасной зоны вихревого следа одного ГВ, вычисления по слежению за вихревым следом ГВ осуществляются в отношении всех ГВ, находящихся в окрестности ЛА, а отображаются на дисплее только зоны вихревых следов ГВ, попадания в которые следует избежать по причине их опасности для ЛА. При этом на основе оценки пилотом схемы расположения потенциально опасных зон на дисплее может быть принято адекватное решение о характере маневра ЛА, который приведет к выходу ЛА из области опасных зон вихревых следов.
Подсистема 4 предупреждения о возможности попадания ЛА в опасную зону вихревого следа ГВ согласно изобретению может быть реализована с использованием штатного бортового и наземного оборудования, например бортовой инерциальной навигационной системы ЛА (Airborne Inertial Navigation System (AINS), системы воздушных сигналов (Air Data Computer System (ADC), доплеровского измерителя скорости сноса ЛА (Doppler System (DS), радиолокатора переднего обзора ЛА (Forward View Radar (FVR) и использованием информации, поступающей от управления воздушным движением (Air Traffic Control (ATC), системы единой индикации (United Indication System (UIS), мультиплексного канала информационного обмена (Information Exchange Multiplex Channel (IEMC), а также от совместимых с указанными системами информационных систем, применяемых на ЛА других стран, например системы предотвращения столкновений Collision Avoidance System (TCAS), системы предупреждения об опасности движения Traffic Alert, США.
Кроме того, устройства интегрированной системы согласно изобретению могут быть локализованы раздельно на различных объектах системы управления движением или различных ЛА и ГВ с обеспечением информирования пользователя о результатах осуществления операционных вычислений с помощью индикации и визуализации их. При этом пользователями такой информации могут быть как экипажи ЛА, так и диспетчерские службы аэродромов, кораблей, консультирующих экипажи ЛА при производстве полетов о рекомендуемой траектории полета или о необходимости маневра ЛА для исключения опасной полетной ситуации, что особенно важно в условиях плохой видимости и сложных метеоусловиях.
Специалистам в области авиации должно быть понятно, что интегрированная система вихревой безопасности согласно изобретению является воплощением комплексного подхода к проблеме обеспечения безопасности летательных аппаратов, и применима как в условиях полета по маршруту, так и в условиях посадки или взлета летательных аппаратов.
При этом подсистема пользователя, размещенная как на борту ЛА, так и в месте размещения диспетчера полета, может обеспечить текущую коррекцию имеющейся у диспетчера информации о вихревой обстановке в районе приземления или посадки, что позволит не только повысить безопасность взлета и посадки, но и сократить временной интервал между ЛА при взлете или приземлении.
Кроме того, применение интегрированной системы безопасности согласно изобретению позволит снизить нагрузку диспетчера полета по формированию предписывающих указаний пилоту, так как ответственность принятия решения о выполнении маневра уклонения от опасной зоны вихревого следа ложится на пилота, и ему предоставляется дополнительная информация, облегчающая принятие решения. При этом следует иметь в виду, что, так или иначе, решение пилот принимает и сейчас, без использования интегрированной системы вихревой безопасности согласно изобретению, но в условиях отсутствия информации о расположении опасных зон вихревых следов.
Специалистам в области авиации и авионики должно быть понятно, что в интегрированную систему вихревой безопасности согласно настоящему изобретению могут быть внесены улучшения и усовершенствования, не выходящие за рамки притязаний и формулы настоящего изобретения, связанные с различием условий применения системы, а также с усовершенствованием навигационных и информационных систем. Например, могут быть применены различные вычислительные алгоритмы, наиболее точно реализующие поставленные задачи, применены различные способы индикации и визуализации информации, предоставляемой пользователю, улучшающие адекватность восприятия полученной пользователем информации, предусмотрено использование различных информационных потоков.
Для специалистов по управлению воздушным движением должно быть ясно, что интегрированную систему вихревой безопасности согласно изобретению можно реализовать и для выполнения функций управления полетами, так как отслеживание вихревой обстановки в окрестности наземных ГВ и летящих ГВ можно осуществлять с использованием систем предупреждения, размещенных автономно на ЛА, на кораблях, на аэродромах, объединенных в единую информационную систему, позволяющую предотвращать создание нештатных ситуаций, связанных с попаданием ЛА в опасные зоны вихревых следов различных ГВ. При этом в качестве ГВ могут быть ЛА различных типов, например самолеты, вертолеты, беспилотные средства, а также морские суда, в том числе, авианосцы, а также наземные сооружения и другие объекты.
Промышленная применимость
Интегрированную систему вихревой безопасности летательного аппарата согласно изобретению целесообразно реализовывать в виде программ, адаптированных к типу ЛА, условиям эксплуатации ЛА, типу используемого на нем оборудования, и совместимых с информационными системами управления воздушным движением.
Интегрированная система вихревой безопасности согласно изобретению может быть легко реализована с помощью известных устройств, может быть использована для установки на различных летательных аппаратах, а также в различных тренажерах для обучения пилотов и диспетчеров действиям в условиях вихревой опасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОСТИ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2003 |
|
RU2324203C2 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| Способ обеспечения вихревой безопасности летательного аппарата | 2021 |
|
RU2774083C1 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477893C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2469411C1 |
| СПОСОБ И БОРТОВАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ МИНИМУМОВ ДИСТАНЦИЙ ПРОДОЛЬНОГО ЭШЕЛОНИРОВАНИЯ ПО УСЛОВИЯМ ТУРБУЛЕНТНОСТИ ВИХРЕВОГО СЛЕДА | 2012 |
|
RU2525167C2 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2496121C1 |
Изобретение относится к системам обеспечения безопасности эксплуатации летательных аппаратов. Система содержит информационные подсистемы, обеспечивающие фиксацию, сохранение и предоставление пользователю информации о предполагаемом взаимном расположении летательного аппарата и действующих на летательный аппарат индуцированных вихревым следом генераторов вихрей опасных аэродинамических сил и моментов, зон вихревых следов в прогнозируемый момент времени на упреждающем расстоянии от летательного аппарата. В качестве пользователя, который задает критерии опасности, может выступать экипаж летательного аппарата и/или диспетчерские службы воздушного движения. При этом информация может быть визуализирована в удобном для восприятия виде, в объеме, достаточном для формирования предписывающего сигнала на выполнение маневра уклонения летательного аппарата от опасной зоны вихревого следа. Технический результат заключается в повышении безопасности полета. 14 з.п. ф-лы, 5 ил.
подсистему (1) информации о летательном аппарате, способную фиксировать, сохранять и предоставлять пользователям информацию о конфигурации, положении, скорости перемещения и ориентации летательного аппарата в пространстве;
подсистему (2) информации о генераторах вихревого следа, способную фиксировать, сохранять и предоставлять пользователям информацию о типе, положении, скорости перемещения и ориентации генераторов вихрей в области нахождения летательного аппарата;
подсистему (3) информации об окружающей среде, способную фиксировать, сохранять и предоставлять пользователям информацию о состоянии окружающей среды в области нахождения летательного аппарата в текущий момент времени и в прогнозируемый момент времени;
подсистему (4) предупреждения пользователей о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей в прогнозируемый момент времени;
подсистему (5) пользователя, способную принимать, сохранять и отображать для пользователя информацию, поступающую от других подсистем, и формировать предписывающий сигнал на выполнение летательным аппаратом маневра, обеспечивающего уклонение летательного аппарата от опасной зоны вихревых следов генераторов вихрей в течение выбранного пользователем времени упреждения после получения пользователем предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей в прогнозируемый момент времени;
коммуникационную подсистему (6), обеспечивающую интеграцию подсистем в единый комплекс, и при этом:
подсистема (1) информации о летательном аппарате обеспечивает прием, обработку, хранение и передачу подсистеме предупреждения пользователей, по меньшей мере, информации о конфигурации, координатах и ориентации летательного аппарата в инерциальной системе координат, о проекциях скорости летательного аппарата и проекциях угловой скорости в связанной с летательным аппаратом системе координат;
подсистема (2) информации о генераторах вихревых следов обеспечивает прием, обработку, хранение и передачу пользователю, по меньшей мере, информации о типах генераторов вихрей, их координатах и ориентации, проекциям скорости и угловой скорости в инерциальной системе координат;
подсистема (3) информации об окружающей среде обеспечивает прием, обработку, хранение и передачу пользователю, по меньшей мере, информации о проекциях скорости ветра в инерциальной системе координат на различных высотах в области локализации вихревых следов, степени турбулентности атмосферы;
подсистема (4) предупреждения пользователя о возможности попадания летательного аппарата в опасные зоны вихревых следов генераторов вихрей осуществляет, по меньшей мере, расчет положения, интенсивности и опасных зон вихревых следов генераторов вихрей, области прогнозируемых положений летательного аппарата в прогнозируемый момент времени и направляет подсистеме пользователя информацию о возможном попадании летательного аппарата в опасные зоны вихревых следов генераторов вихрей в прогнозируемый момент времени;
подсистема (5) пользователя осуществляет прием, обработку, хранение и отображение информации от подсистемы предупреждения, по меньшей мере, о наступлении в прогнозируемый момент времени события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей и формирует предписывающий сигнал на изменение положения летательного аппарата, обеспечивающее увеличение указанного расстояния.
подсистема (1) информации о летательном аппарате реализована на основе штатного бортового оборудования летательного аппарата и/или оборудования наземного, морского и/или авиационно-космического навигационных комплексов;
подсистема (2) информации о генераторах вихревого следа реализована на основе штатного бортового оборудования летательного аппарата и/или штатного оборудования генератора вихрей, и/или оборудования системы управления воздушным движением наземного, морского и/или авиационно-космического навигационных комплексов;
подсистема (3) информации об окружающей среде реализована на основе штатного бортового оборудования летательного аппарата и/или на основе штатного оборудования метеорологического обеспечения системы управления воздушным движением или находится в составе наземного, морского и/или авиационно-космического навигационных комплексов;
подсистема (4) предупреждения пользователя о возможности попадания летательного аппарата в опасные зоны вихревых следов генераторов вихрей реализована на основе программного обеспечения вычислительных систем пользователя и/или бортовых систем единой индикации и/или систем индикации диспетчерских служб управления воздушным движением или находится в составе наземного, морского и/или авиационно-космического навигационных комплексов в месте размещения диспетчера полета;
подсистема (5) пользователя реализована на основе вычислительных и навигационных систем пользователя в составе штатного бортового оборудования летательного аппарата и/или наземного или морского навигационного комплекса в месте размещения диспетчера полета;
коммуникационная подсистема (6) реализована на основе систем телекодовой связи и/или бортовых мультиплексных каналов информационного обмена, и при этом пользователем является летательный аппарат и/или диспетчерская служба управления воздушным движением, а предписывающий сигнал реализуется в системе управления летательным аппаратом.
устройство (7) слежения за параметрами летательного аппарата, способное принимать информацию о конфигурации, положении и ориентации летательного аппарата относительно инерциальной системы координат в текущий момент времени;
устройство (8) слежения за генератором вихрей, способное принимать информацию о положении, геометрических и массовых характеристиках генератора вихрей относительно той же системы координат в текущий момент времени, и о параметрах его движения;
запоминающее устройство (9), способное сохранять информацию о положении и параметрах движения генератора вихрей в инерциальной системе координат:
детектор (10) параметров среды, способный принимать информацию о параметрах окружающей среды в области совместного размещения летательного аппарата и генератора вихрей в текущий момент времени;
устройство (11) слежения за вихревым следом, способное определять траекторию и интенсивность вихревого следа генератора вихрей, как совокупности траекторий центров областей завихренности, в инерциальной системе координат;
запоминающее устройство (12), способное сохранять информацию о координатах точек траектории и интенсивности следа генератора вихрей, как совокупности траекторий центров областей завихренности, в инерциальной системе координат;
устройство (13) выбора времени упреждения, в течение которого, по меньшей мере, возможно выполнение маневра изменения траектории полета летательного аппарата, обеспечивающего уклонение летательного аппарата от вихревого следа генератора вихрей после предупреждения о возможности попадания в него;
устройство (14) моделирования контрольной плоскости, способное вычислять упреждающее расстояние, равное расстоянию, преодолеваемому летательным аппаратом за время упреждения, формировать контрольную плоскость, расположенную в пространстве перед летательным аппаратом перпендикулярно направлению его движения на упреждающем расстоянии от летательного аппарата, и определять прогнозируемый момент времени пролета летательного аппарата через контрольную плоскость в инерциальной системе координат,
устройство (15) определения параметров опасной зоны, способное определять геометрические характеристики опасной зоны вихревого следа генератора вихрей, как совокупности опасных зон областей завихренности, генерируемых генератором вихрей, в прогнозируемый момент времени;
устройство (16) прогнозирования, способное определять траекторию вихревого следа генератора вихрей, как совокупность траекторий центров областей завихренности, генерируемых генератором, и интенсивность вихревого следа относительно инерциальной системы координат в прогнозируемый момент времени;
устройство (17) вычисления точек пересечения, способное определять координаты точек пересечения траектории вихревого следа генератора вихрей с контрольной плоскостью в прогнозируемый момент времени пересечения летательным аппаратом указанной контрольной плоскости:
устройство (18) формирования зон и областей, обеспечивающее:
формирование вокруг точки пересечения траектории вихревого следа с контрольной плоскостью опасной зоны вихревого следа, как совокупности опасных зон областей завихренности, генерируемых генератором, при попадании в которую у летательного аппарата параметры движения могут превысить допустимые пределы;
формирование в указанной контрольной плоскости области прогнозируемых с учетом установленных нормативов производства полета положений летательного аппарата в прогнозируемый момент пересечения летательным аппаратом контрольной плоскости;
формирование вокруг области прогнозируемых положений области повышенного внимания, информация о попадании в которую опасной зоны вихревого следа должна быть предоставлена пользователю;
блок (19) перехода, способный вычислять координаты области прогнозируемых положений летательного аппарата, области повышенного внимания и опасной зоны вихревого следа в системе координат, связанной с летательным аппаратом;
первый блок (20) проверки условия пересечения, способный определять расстояние от области повышенного внимания до опасной зоны вихревого следа и фиксировать момент его равенства нулю;
второй блок (21) проверки условия пересечения, способный определять расстояние от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа и фиксировать момент его равенства нулю:
первое сигнальное устройство (22), обеспечивающее формирование и передачу подсистеме пользователя сигнала о наступлении события равенства нулю расстояния от области повышенного внимания до опасной зоны вихревого следа генератора вихрей;
второе сигнальное устройство (23), обеспечивающее формирование и передачу подсистеме пользователя аварийного сигнала о наступлении события равенства нулю расстояния от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа генератора вихрей.
устройство (7) слежения за параметрами летательного аппарата способно принимать информацию, по меньшей мере, о конфигурации, положении, координатах, скорости перемещения, углах тангажа, рыскания и крена летательного аппарата;
устройство (8) слежения за генератором вихрей способно принимать информацию, по меньшей мере, о типе генератора вихрей, скорости его перемещения, угловой скорости и координатах точек его траектории;
детектор (10) параметров среды способен принимать информацию, по меньшей мере, о величине и направлении локальной скорости ветра, профиле ветра по высоте, степени турбулентности, типе подстилающей поверхности:
устройство (11) слежения за вихревым следом способно определять траекторию и интенсивность вихревого следа генератора вихрей как совокупности траектории центров областей завихренности, на основе сохраненной информации о типе генератора вихрей, координатах точек его траектории, скорости перемещения и угловой скорости;
устройство (14) моделирования контрольной плоскости способно моделировать контрольную плоскость на основе информации о местонахождении, ориентации и скорости перемещения летательного аппарата и величине времени упреждения;
устройство (14) определения параметров опасной зоны способно определять геометрические характеристики опасной зоны вихревого следа генератора вихрей на основе сохраненной информации о координатах точек траектории и интенсивности следа генератора вихрей, информации о положении, конфигурации, скорости перемещения и угловой скорости летательного аппарата в инерциальной системе координат;
устройство (16) прогнозирования способно определять траекторию вихревого следа генератора вихрей и интенсивность вихревого следа на основе информации о траектории и интенсивности вихревого следа как совокупности траекторий центров областей завихренности, генерируемых генератором, в инерциальной системе координат;
устройство (17) вычисления точек пересечения способно определять координаты точек пересечения траектории вихревого следа генератора вихрей с контрольной плоскостью на основе информации о координатах контрольной плоскости, траектории вихревого следа в инерциальной системе координат в прогнозируемый момент времени;
устройство (18) формирования зон и областей способно формировать опасную зону вихревого следа, область прогнозируемых положений летательного аппарата, область повышенного внимания на основе информации о координатах точек пересечения вихревого следа генератора вихрей в прогнозируемый момент времени, информации о геометрических характеристиках опасной зоны как совокупности опасных зон областей завихренности, генерируемых генератором вихрей, информации о конфигурации, положении, ориентации, скорости перемещения и угловой скорости летательного аппарата с учетом установленных нормативов производства полета в инерциальной системе координат;
блок (19) перехода способен вычислять координаты области прогнозируемых положений летательного аппарата, области повышенного внимания и опасной зоны вихревого следа в системе координат, связанной с летательным аппаратом, на основе информации о координатах области повышенного внимания, области прогнозируемых положений и опасной зоны вихревого следа в прогнозируемый момент времени в инерциальной системе координат и информации о конфигурации, координатах летательного аппарата и его положении, предпочтительно, углах тангажа, рыскания и крена, в инерциальной системе координат в текущий момент времени.
блок (25) схематизации летательного аппарата, способный вычислять совокупность геометрических характеристик летательного аппарата, необходимых для расчета действующих на него дополнительных аэродинамических сил и моментов, индуцированных вихревым следом генератора вихрей;
блок (26) определения дополнительных, действующих на летательный аппарат в заданной точке пространства, аэродинамических сил и моментов, индуцированных вихревым следом генератора вихрей, способный вычислять их на основе сохраненной информации о координатах точек траекторий центров завихренности и интенсивности следа генератора вихрей, как совокупности траекторий центров областей завихренности в инерциальной системе координат, информации о конфигурации, положении, скорости перемещения и угловой скорости летательного аппарата в инерциальной системе координат и геометрических характеристиках летательного аппарата;
блок (27) определения опасности аэродинамических возмущений в заданной точке пространства, способный производить оценку опасности возмущений по критерию опасности, установленному пользователем;
блок (28) определения множества точек пространства, в которых дополнительные аэродинамические силы и моменты, индуцированные вихревым следом генератора вихрей, являются опасными, способный определять координаты точек пространства, принадлежащих опасной зоне, на основе отбора их по критерию опасности, установленному пользователем;
блок (29) определения геометрических характеристик опасной зоны вихревого следа, способный вычислять их на основе информации о координатах точек, принадлежащих опасной зоне.
| US 5724040 А, 03.03.1998 | |||
| US 5657009 А, 12.08.1997 | |||
| US 4137764 А, 06.02.1979 | |||
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| Способ имитации момента аэродинамической силы парусного вооружения | 1989 |
|
SU1723570A1 |

