Предлагаемое изобретение относится к области обеспечения безопасности выполнения полетов и может быть использовано для оповещения экипажа или оператора летательных аппаратов (ЛА) о вероятности попадания в вихревой след самолета генератора-вихрей, а также выдачи информации о попадании в опасную вихревую зону в систему управления и подсистему ограничения предельных пилотажных параметров самолета для формирования сигнала на совершения маневра.
Обеспечение вихревой безопасности полетов летательных аппаратов (ЛА) является актуальной проблемой, так как попадание ЛА в опасную зону вихревого следа продолжаются. Так, по данным NATS (провайдер аэронавигационных услуг Великобритании) на 2018 год, частота входа в вихревые следы от самолетов увеличилась с 1,8 до 6,2 раза на 100 тысяч часов полета.
Одним из путей повышения безопасности полетов ЛА является предоставление пилоту в реальном масштабе времени информации о действительном воздействии вихревого следа на движение ЛА.
При этом одновременно должна предоставляться информация о степени опасности нахождения в вихревой зоне с возможностью формирования маневра для выхода из опасной зоны и, как следствие, на этой основе целесообразно создание системы вихревой безопасности ЛА.
Из данной области техники известны следующие технические решения.
Известен способ предотвращения попадания ЛА в вихревой след (см., например, Золотухин В.В. "Моделирование вихревых следов в задачах управления воздушным движением". Международный журнал "Программные продукты и системы", №1, 2011 г.), включающий в себя следующие этапы:
- получение от ЛА-генератора, попавшего в поле зрения ЛА-абонента, полетных данных;
- расчет характеристик вихревого следа: время затухания, протяженность, высота опускания, размеры полуосей вихревого эллипса вихревого следа;
- получение данных о траектории движения за промежуток времени, равный расчетному времени затухания;
- проверка, остается ли ЛА-генератор в поле зрения. Если остается, то провести с ним обмен полетными данными, наблюдать за его вихревым следом (или его частью), находящимся в зоне видимости;
- если ЛА-генератор вне зоны видимости, проверить, исчез ли его вихревой след. Если исчез, алгоритм завершается;
- определение расчетом, приведет ли сохранение текущего курса к попаданию в вихревой след. Если не приведет, продолжить движение текущим курсом;
- проверка, попадет ли ЛА при текущем курсе в вихревой след, выполнить расчет размеров следа в точке пересечения к моменту пересечения. Если вихри исчезнут, продолжить движение текущим курсом, итерация завершается;
- если при расчете выяснится, что вихри в точке пересечения не исчезают, следует выбрать оптимальный маневр, чтобы избежать попадания ЛА-абонента в вихревой след.
С помощью данного способа расчетом определяют размеры вихревого эллипса и его местоположение до момента затухания, и если при этом ЛА-абонент попадает в рассчитанный вихревой эллипс, то ему предписывают выполнение необходимого маневра. Однако при оценке по этому способу опасности влияния вихревого следа возможны значительные погрешности определения расчетных размеров вихревого эллипса.
Известен способ предупреждения от возможного попадания ЛА в опасную зону вихревого следа (патент РФ №2324203 с приоритетом от 25.07.2003, МПК: G01S 13/95), включающий получение информации о конфигурации, местонахождении и ориентации ЛА относительно инерциальной системы координат в текущий момент времени, получение и сохранение информации о параметрах движения генератора вихрей (ГВ) и его положении, геометрических и массовых характеристиках относительно той же системы координат в текущий момент времени, получение информации о параметрах окружающей среды в области совместного размещения ЛА и ГВ, определение траектории и интенсивности вихревого следа ГВ как совокупности траекторий центров областей завихренности, генерируемых указанным ГВ, в инерциальной системе координат в текущий момент времени, сохранение информации о координатах точек траектории и интенсивности вихревого следа ГВ как совокупности траекторий центров областей завихренности в инерциальной системе координат, выбор времени упреждения, в течение которого ЛА может, по меньшей мере, выполнить маневр изменения траектории полета, обеспечивающий уклонение ЛА от вихревого следа ГВ после предупреждения о возможности попадания в него, вычисление упреждающего расстояния, равного расстоянию, преодолеваемому ЛА за время упреждения, моделируют контрольную плоскость, расположенную в пространстве перед ЛА, и определяют прогнозируемый момент времени полета ЛА через указанную контрольную плоскость в инерциальной системе координат, а также осуществляют для пользователя индикацию события равенства нулю расстояния до опасной зоны вихревого следа указанного ГВ.
Данный известный способ обеспечивает информирование пользователя о возможности опасной ситуации, однако точность нахождения координат выделенной опасной вихревой зоны и соответственно вероятность попадания в нее ЛА определяется точностью расчета характеристик опасной зоны без подтверждения фактическими измерениями.
Кроме этого, для реализации данного метода потребуется установка дорогостоящих лидаров на каждый ЛА и создание объединенных в единую информационную систему систем, размещенных на ЛА, кораблях, аэродромах, пунктах управления воздушным движением и т.д., что сопряжено с необходимостью значительных финансовых затрат и в ряде случаев нецелесообразно.
Известен способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей (патент РФ №2695249 с приоритетом от 29.11.2018, МПК: G08G 5/02).
Для реализации способа получают информацию о конфигурации, местонахождении и ориентации летательного аппарата и самолета-генератора вихрей, а также информацию о параметрах окружающей среды в текущий момент времени, определяют геометрические характеристики опасной зоны вихревого следа, представляют визуальную информацию экипажу о риске попадания в опасную зону вихревого следа определенным образом, при этом обеспечивается снижение пилотажной нагрузки на летчика.
Однако представленный способ обеспечивает точность определения опасной зоны вихревого следа и необходимость совершения маневра уклонения с точностью расчета без подтверждения реального положения вихревого следа и ЛА.
Известен способ обеспечения вихревой безопасности ЛА в вихревой след самолета-генератора вихрей (патент РФ №2477893 с приоритетом от 30.09.2011, МПК: G08G 5/02), при котором осуществляется передача ЛА-генератором вихревого следа информации о создаваемом им вихревом следе, скорости полета, координатах, времени передачи путем радиосвязи "борт-борт" в радиовещательном режиме и/или в режиме "точка-точка" и последующий прием этой информации ЛА-абонентом или ЛА-абонентами.
ЛА-абонент производит текущие, соответствующие параметрам приходящего к нему вихревого следа от ЛА-генератора вихревого следа, расчеты величины действующего на него возмущающего момента крена и измерения вихревой обстановки перед ЛА-абонентом, по результатам которых также проводит расчеты возмущающего момента крена, а затем производит сравнение величин возмущающего момента крена, рассчитанных по результатам этих измерений, с величинами возмущающего момента крена, полученных расчетом на основании переданной информации с ЛА-генератора вихревого следа, при этом требуемые для определения вихревой обстановки перед ЛА-абонентом данные получают путем измерений с помощью датчиков статического давления, устанавливаемых в передних "критических" точках его крыла, причем наибольшее из вычисленных значений возмущающего момента крена выбирают как ожидаемое воздействие вихревого следа на ЛА-абонент и выбранную величину в качестве корректирующей вводят в систему управления ЛА-абонента.
Однако данный способ обеспечивает информирование пилота о попадании в вихревой след только в том случае, если вихрь попал в приемник давления при этом для определения разрежения в вихре, по которому определяется приращение момента крена необходимо знать статическое давление невозмущенной вихрем окружающей атмосферы, а это заранее не известно. Кроме этого, в данном патенте решение о степени опасности рекомендуется принимать из большей величины между расчетом и измерением, что необоснованно может завысить степень опасности вихревого воздействия.
Известны система и способ для обнаружения вихревого следа летательного аппарата (патент US8478459).
В систему входят средство для определения угла крена летательного аппарата, например, инерциальная платформа, средство для определения расчетных/экспериментальных зависимостей изменения угла крена самолета от времени полета при воздействии на него вихревых возмущений для различных характеристик самолета-генератора вихрей (скорость, масса, размах крыла) и условий окружающей среды (ветер, температура в пространстве между ЛА), средство для сравнения угла крена ЛА и полученных зависимостей изменения угла крена от времени полета при воздействии вихревых возмущений и средство оповещения пилота ЛА об обнаружении вихревого следа, когда рассогласование между сравниваемыми величинами меньше заданного порогового значения или равно ему.
При реализации способа, определяют угол крена самолета, воспринимающего вихревые возмущения, определяют зависимости изменения угла крена самолета от времени полета при воздействии на него вихревых возмущений со стороны самолета-генератора вихрей, причем данные зависимости могут быть получены по результатам моделирования или летных испытаний. Затем сравнивают величину угла крена самолета, воспринимающего вихревые возмущения, с полученными зависимостями изменения угла крена от времени полета и предупреждают экипаж об опасности, когда величина зарегистрированного рассогласования меньше заданного порогового значения или равна ему.
Недостатком данного способа является то, что необходимо заранее знать расчетные/экспериментальные зависимости, определяющие влияние вихревого следа на крен ЛА, попадающего под его воздействие, во времени с учетом характеристик ЛА и окружающей атмосферы. При этом турбулентность (стохастическая) атмосферы − основной фактор развития и затухания вихревого следа − определяется косвенно, например, по измерениям наземных станций управления. Следовательно, параметры вихревого следа и его координаты носят также вероятностный характер, что может привести к ошибочной оценке вихревой опасности как в сторону преувеличения ее, так и преуменьшения. Также реализация данного способа не предусматривает формирование сигналов на уклонение ЛА от опасной зоны вихревого следа, а только выдает сигнал экипажу об опасности вхождения в вихревой след впереди летящего самолета, значительно ограничивая время для экипажа на совершение маневра. При этом оповещения системы управления ЛА о вихревой опасности в данном способе не предусмотрено, что повышает нагрузку на экипаж.
Данный способ по технической сущности является наиболее близким к заявляемому изобретению и может выступать в качестве прототипа.
Задачей, на решение которой направлено данное изобретение, является создание способа обеспечения вихревой безопасности ЛА, обеспечивающий с высокой точностью и достоверностью определение степени опасности воздействия вихревого следа на аэродинамические и пилотажные характеристики ЛА при достижении своевременного оповещения экипажа или оператора ЛА в режиме реального времени о вероятности попадания ЛА в опасную зону вихревого следа или о фактическом попадании в нее с возможностью, в этом случае, формирования и выдачи сигналов контрольной системе управления и подсистеме ограничения предельных пилотажных параметров на совершение маневра для выхода из данной опасной вихревой зоны.
Технический результат заключается в возможности своевременной регистрации в режиме реального времени степени опасности оказываемых на ЛА вихревых возмущений при обеспечении заблаговременной информированности экипажа или оператора об их возможных неблагоприятных воздействиях, с высокой точностью и достоверностью, для формирования сигналов контрольной системе управления и подсистеме ограничения предельных пилотажных параметров на совершение маневра на выход из данной опасной вихревой зоны.
Технический результат заявленного изобретения достигается при реализации способа обеспечения вихревой безопасности полета летательного аппарата (ЛА), при котором от бортовой системы сбора, контроля, обработки и регистрации полетной информации получают данные о местоположении, летно-технических характеристиках и параметрах движения ЛА-генератора вихрей, получают информацию о местонахождении, летно-технических и пилотажных характеристиках ЛА, воспринимающего вихревые возмущения, и его ограничениях, получают информацию о параметрах окружающей среды в области местоположения данного ЛА, определяют геометрические характеристики и месторасположение опасной зоны вихревого следа ЛА-генератора вихрей, рассчитывают вероятность попадания ЛА в опасную зону вихревого следа, определяют в режиме реального времени текущий момент крена ЛА, соответствующий плану полета, определяют в режиме реального времени момент крена, создаваемый органами управления ЛА, отличающегося тем, что в режиме реального времени оповещают экипаж или оператора ЛА о вероятности попадания в опасную зону вихревого следа и прогнозе его развития, выдают в систему управления и подсистему ограничения предельных пилотажных параметров данную информацию, определяют величину рассогласования между величинами текущего момента крена ЛА, соответствующего плану полета, и момента крена, создаваемого органами управления ЛА, как разность между ними, при достижении повышенных значений данной величины рассогласования в режиме реального времени оповещают экипаж или оператора ЛА о фактическом вхождении в вихревой след, выдают сигнал о попадании ЛА в вихревой след контрольной системе управления и подсистеме ограничения предельных пилотажных параметров, в случае, если величина данного рассогласования превышает заданное пороговое значение, формируют и выдают сигнал данным системам на совершение маневра для выхода из опасной вихревой зоны.
В заявленном способе одновременно реализуется оповещение экипажа или оператора ЛА в режиме реального времени о вероятности попадания в опасную зону вихревого следа, определенной на основе рассчитанных характеристик опасной зоны и информации о местоположении ЛА, и регистрация опасных вихревых возмущений, оказываемых на ЛА со стороны других ЛА, по величине рассогласования между оценками текущего момента крена, соответствующего плану полета, и момента крена, создаваемого органами управления ЛА, обеспечивая возможность своевременной регистрации в режиме реального времени степени опасности оказываемых на ЛА вихревых возмущений в течение его полета, с высокой точностью и достоверностью, причем экипаж или оператор ЛА информирован о возможных опасных воздействиях вихревого следа до момента его неблагоприятного действия на движение ЛА. При этом обеспечивается возможность совершения маневра ЛА для выхода из опасной зоны вихревого следа посредством формирования и выдачи соответствующих сигналов контрольной системе управления и подсистеме ограничения предельных пилотажных параметров при достижении величины рассогласования заданного порогового значения, тем самым повышая безопасность полета ЛА.
Далее изобретение будет описано со ссылками на чертежи.
На фиг.1 представлена иллюстрация процесса формирования самолетом А-380 опасного вихревого следа.
На фиг.2 представлена схема моделирования влияния вихревых возмущений, создаваемых самолетом-генератором вихрей на движение ЛА.
На фиг.3 представлена зависимость изменения угла крена самолета, попавшего в зону вихревого следа от самолета А-380, от времени полета.
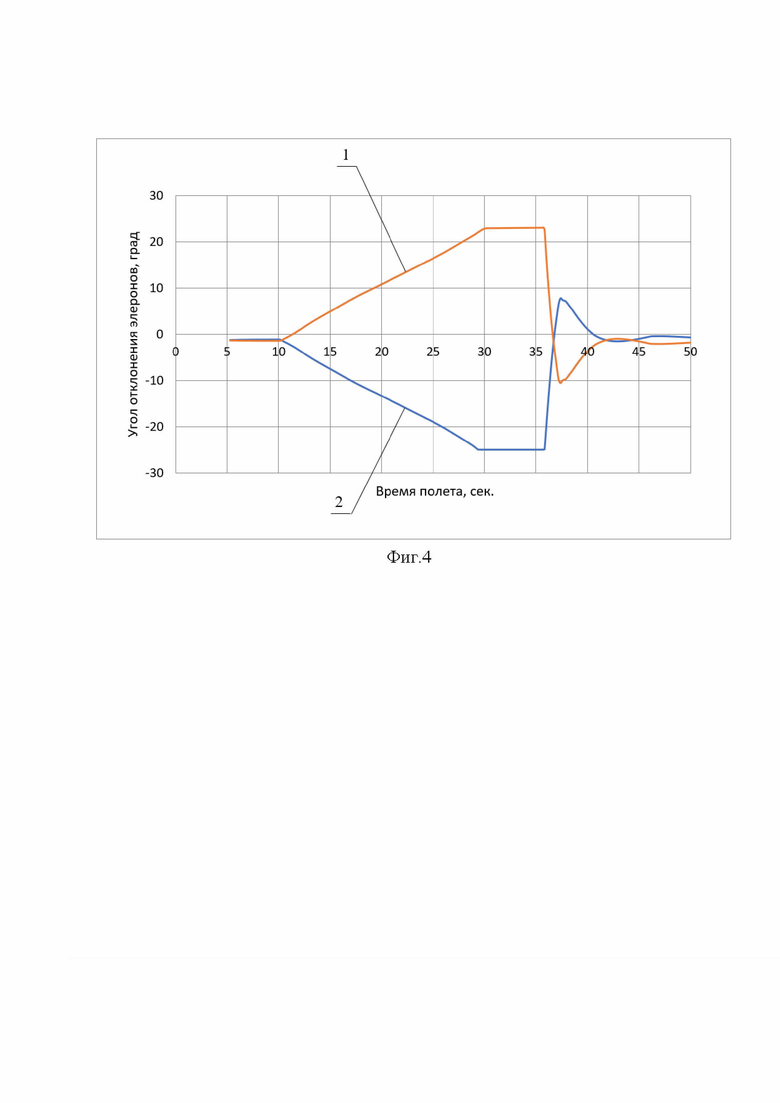
На фиг.4 представлена зависимость изменения величины угла отклонения элеронов самолета, попавшего в зону вихревого следа от самолета А-380, от времени полета, где 1 - зависимость изменения величины отклонения правого элерона от времени полета, 2 - зависимость изменения величины отклонения левого элерона от времени полета.
Способ обеспечения вихревой безопасности летательного аппарата осуществляется следующим образом.
Для реализации способа от бортовой системы сбора, контроля и обработки полетной информации ЛА получают информацию о местонахождении, летно-технических характеристиках, параметрах движения ЛА-генератора вихрей, получают информацию о месторасположении, летно-технических, пилотажных характеристиках ЛА, воспринимающего вихревые возмущения, и его ограничениях, получают информацию о параметрах окружающей среды в области расположения данного ЛА.
Затем рассчитывают геометрические характеристики и местоположение опасной зоны вихревого следа.
Расчет прогнозируемой опасной зоны вихревого следа выполняют по следующему алгоритму:
- рассчитывается начальная циркуляция вихря за ЛА-генератора:
где g - ускорение свободного падения, м/с2;
ρ - плотность воздуха, кг/м3;
m - вес ЛА, кг;
V - скорость ЛА, м/с;
 - начальный размах вихрей, B - размах крыла ЛА, м;
- начальный размах вихрей, B - размах крыла ЛА, м;
- рассчитывается затухание вихря при удалении от ЛА-генератора вихря и скорость их опускания (технический отчет для поддержки вопроса безопасности для рекатегоризации ICAO стандартов турбулентности вихревого следа):
где:
q - атмосферная турбулентность;
x - удаление от воздушного судна.
(А.М. Гайфуллин Математическая модель аэродинамика самолета в вихревом следе, ученые записки ЦАГИ, том 10 LI, 2010, №4);
- рассчитывается изменение координат, математическое ожидание центров вихрей:
где Z0 - начальная координата;
W - скорость ветра;
τ - время.
(В.В. Золотухин Моделирование вихревых следов в задачах управления воздушным движением, Программные продукты и системы, №1, 2011).
В результате расчетов формируется опасная зона вихревого следа от ЛА-генератора вихрей с известными геометрическими размерами и координатами, определяемыми с учетом стохастичности атмосферы (фиг.1), в которой в данный момент времени с определенной вероятностью может находиться ЛА.
На основе полученной информации об опасной зоне вихревого следа от ЛА-генератора вихрей определяют вероятность попадания ЛА в данную опасную зону вихревого следа и выдают прогноз его развития, после чего осуществляют оповещение экипажа или оператора ЛА о вероятности попадания в опасную зону вихревого следа. Данную информацию также выдают в контрольную систему управления и подсистему ограничения предельных пилотажных параметров.
Регистрацию фактического вхождения ЛА в опасную зону вихревого следа впереди летящего ЛА и оценку степени опасности воздействий вихревых возмущений на ЛА осуществляют по диагностическому признаку, в качестве которого предлагается выбрать величину приращения момента крена ЛА, определяемую как разность между величиной текущего момента крена ЛА, соответствующего плану полета, и величиной момента крена, создаваемого органами управления ЛА, превышение которой некоторого порогового значения, определяемого для каждого типа ЛА, указывает на наличие момента, создаваемого внешним по отношению к самолету фактором, то есть вихревым следом.
Текущий момент крена Мт определяется из выражения:
Оценка безразмерного коэффициента текущего момента крена mт определяется из следующего уравнения:
где ωx, ωy, ωz - угловые скорости относительно связанных осей, рад/с;
Ix, Iy, Iz - моменты инерции относительно связанных осей связанной системе координат, кг×м2;
l - размах крыла и длина средней аэродинамической хорды, м;
S - эквивалентная площадь крыла, м2;
q=ρHV2 /2 - скоростной напор, Па;
ρH - плотность воздуха на высоте полета, кг/м3;
V - истинная воздушная скорость, м/с.
Для нахождения производной угловой скорости крена выполняется численное дифференцирование по формулам, представленным в [Васильченко К.К., Леонов В.А., Пашковский И.М., Поплавский Б.К. Летные испытания самолетов. М.: Машиностроение. 1993], в которых применяется полиноминальное сглаживание на скользящем интервале

Оценки производной обладают хорошими сглаживающими свойствами, а также являются несмещенными и эффективными.
При использовании сглаживающего полинома четвертого порядка коэффициенты вычисляются по формуле:

где  - интервал дискретизации.
- интервал дискретизации.
Как правило, выбирается m=5.
Для нахождения оценки безразмерного коэффициента момента крена, создаваемого органами управления и другими параметрами движения, предлагается принять в качестве основы следующую модель:

в которую входят составляющие момента крена, создаваемые углом скольжения, угловыми скоростями ωx, ωy, рулем направления δн, элеронами δэ и интерцепторами δинт.
Для задачи обнаружения вихревого следа, учитывая большую мощность сигнала, предлагается момент от органов управления вычислять по формуле:

По найденному mоу вычисляется момент крена из выражения:
Далее вычисляется диагностический признак ΔM как разность между величиной текущего момента крена ЛА и величиной момента крена, создаваемого органами управления ЛА:
В случае, когда величина данного признака принимает повышенные значения, происходит оповещение экипажа или оператора ЛА о фактическом попадании в опасную зону вихревого следа посредством сигнализации. А также, одновременно, данную информацию передают контрольной системе управления и подсистеме ограничения предельных пилотажных параметров.
Если величина данного диагностического признака превышает некоторое заданное пороговое значение ε, формируют и выдают сигнал контрольной системе управления и подсистеме ограничения предельных пилотажных параметров на совершение маневра для выхода из опасной вихревой зоны.
Пороговое значение определяется для каждого типа ЛА по результатам моделирования.
Информирование экипажа о вероятности попадания в опасную зону вихревого следа, о фактическом нахождении в вихревом следе, о прогнозе времени достижения порогового значения величины рассогласования моментов крена осуществляется текстовым сообщением на сигнальном поле кадра системы оповещения экипажа или текстовым сообщением на экране метеорадара аналогично сообщению о сдвиге ветра. Сообщение сопровождается звуковой сигнализацией.
В дальнейшем предлагаемый способ обеспечения вихревой безопасности полета ЛА поясняется результатами моделирования с использованием динамической модели движения ЛА с учетом влияния вихревого следа (фиг.2).
Предложенный способ обеспечения вихревой безопасности полетов реализован на комплексе имитационного моделирования, в результате чего произведена оценка влияния воздействия вихревого следа от А380 на динамику самолета, воспринимающего данные возмущения.
Результаты моделирования, приведенные на фиг.3 и фиг.4, представляют собой зависимости изменения угла крена и углов отклонения элеронов от времени полета.
В соответствии с фиг.3, фиг.4, до 10-й секунды моделировался равномерный полет в невозмущенной (стандартной) атмосфере, с 10-й по 35-ю секунду моделировалась ситуация, соответствующая входу самолета в вихревой след и полету в данной опасной зоне, с 35-й по 37-ю секунду − выход самолета из вихревого следа, с 37-й по 50-ю секунду – полет самолета в невозмущенной атмосфере.
Сигнал на уклонение самолета от опасной вихревой зоны подан на 35-й секунде, за 2 сек самолет вышел из вихревого следа, элероны вернулись в первоначальное положение.
В результате моделирования установлено, что вхождение ЛА в вихревой след от самолета-генератора вихрей характеризуется изменением величин параметров системы управления полетом:
- углов ориентации;
- моментов инерции;
- углов отклонения элеронов;
- углов отклонения интерцепторов.
При этом в большей мере вихревые возмущения оказывают воздействия на крен самолета.
Результаты моделирования подтвердили работоспособность предложенного способа обеспечения вихревой безопасности с формированием сигнала на уклонение летательного аппарата от опасной зоны вихревого следа и совершения маневра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОСТИ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2003 |
|
RU2324203C2 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477893C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
Изобретение относится к способу обеспечения вихревой безопасности полета летательного аппарата (ЛА). Для обеспечения вихревой безопасности получают от бортовой системы сбора, контроля, обработки и регистрации полетной информации определенный набор параметров от ЛА-генератора вихрей и данного ЛА, параметры окружающей среды в области местоположения ЛА, определяют определенным образом геометрические размеры и месторасположение опасной зоны вихревого следа, рассчитывают вероятность туда попадания ЛА, рассчитывают моменты текущего крена ЛА, сравнивают их со значениями, соответствующими плану полета и в случае превышения допустимых значений оповещают экипаж и совершают маневр для выхода из опасной зоны. Обеспечивается повышение безопасности полета. 4 ил.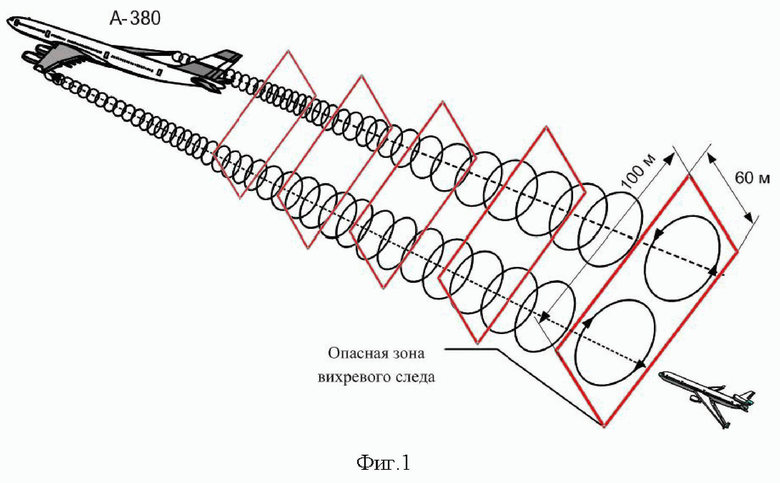
Способ обеспечения вихревой безопасности полета летательного аппарата (ЛА), при котором от бортовой системы сбора, контроля, обработки и регистрации полетной информации получают данные о местоположении, летно-технических характеристиках и параметрах движения ЛА-генератора вихрей, получают информацию о местонахождении, летно-технических и пилотажных характеристиках ЛА, воспринимающего вихревые возмущения, и его ограничениях, получают информацию о параметрах окружающей среды в области местоположения данного ЛА, определяют геометрические характеристики и месторасположение опасной зоны вихревого следа ЛА-генератора вихрей, рассчитывают вероятность попадания ЛА в опасную зону вихревого следа, определяют в режиме реального времени текущий момент крена ЛА, соответствующий плану полета, определяют в режиме реального времени момент крена, создаваемый органами управления ЛА, отличающийся тем, что в режиме реального времени оповещают экипаж или оператора ЛА о вероятности попадания в опасную зону вихревого следа и прогнозе его развития, выдают в систему управления и подсистему ограничения предельных пилотажных параметров данную информацию, определяют величину рассогласования между величинами текущего момента крена ЛА, соответствующего плану полета, и момента крена, создаваемого органами управления ЛА, как разность между ними, при достижении повышенных значений данной величины рассогласования в режиме реального времени оповещают экипаж или оператора ЛА о фактическом вхождении в вихревой след, выдают сигнал о попадании ЛА в вихревой след контрольной системе управления и подсистеме ограничения предельных пилотажных параметров, в случае, если величина данного рассогласования превышает заданное пороговое значение, формируют и выдают сигнал данным системам на совершение маневра для выхода из опасной вихревой зоны.
| СПОСОБ И БОРТОВАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ МИНИМУМОВ ДИСТАНЦИЙ ПРОДОЛЬНОГО ЭШЕЛОНИРОВАНИЯ ПО УСЛОВИЯМ ТУРБУЛЕНТНОСТИ ВИХРЕВОГО СЛЕДА | 2012 |
|
RU2525167C2 |
| CN 109918764 A, 21.06.2019 | |||
| US 20080030375 A1, 07.02.2008 | |||
| US 20160328981 A1, 10.11.2016 | |||
| US 20060121893 A1, 08.06.2006. | |||

