Изобретение относится к системам обеспечения безопасности эксплуатации летательных аппаратов, более конкретно к способам обеспечения соблюдения пилотом минимально допустимых дистанций между самолетами, устанавливаемых из условий безопасного эшелонирования в области прогнозируемой турбулентности вихревого следа при движении самолетов вблизи крупных аэропортов, при взлете и посадке.
С непрерывным ростом интенсивности воздушного движения проблема безопасности полетов, связанная с наличием за самолетами вихревых следов, приобретает все большую актуальность во всем мире, особенно для условий полета самолетов вблизи крупных аэропортов, при взлете и посадке.
В связи с тем что попадание самолета в вихревой след может привести к явлению типа бафтинг (частотно-резонансное возбуждение элементов конструкции самолета), к неконтролируемой угловой скорости вращения по крену (до 200 градусов в секунду) с потерей высоты полета (до 150-200 м), а также к потере управляемости самолета, для повышения безопасности полетов международной организацией ICAO были разработаны и введены правила, определяющие минимальные расстояния между первым и вторым самолетами, гарантирующие безопасный вход второго самолета в след, генерируемый первым самолетом, с учетом конструктивных характеристик первого и второго самолетов и состояния атмосферы в зоне полета. При этом указанные минимумы расстояний были введены для продольного эшелонирования. В дальнейшем эти правила были подвержены неоднократной коррекции в сторону увеличения минимальных расстояний, что привело к тому, что в настоящее время главные аэропорты мира работают на пределе своей пропускной способности. Тем не менее, стандарты эшелонирования воздушных судов по условиям вихревой безопасности являются обязательными при выполнении полетов друг за другом при взлете или посадке на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте.
Разработка способов и систем, которые позволили бы уменьшить дистанции между самолетами и тем самым повысить пропускную способность аэропортов и плотность эшелонирования воздушных судов без снижения уровня безопасности полетов, является весьма актуальной задачей.
Однако повышение пропускной способности путем уменьшения нормативов интервалов между судами, то есть, повышения интенсивности полетов, приводит к снижению вихревой безопасности при выполнении взлетно-посадочных операций.
Известна система предупреждения о вихре (US, 4137764, В1), в которой расстояние между воздушными судами при эшелонировании вблизи взлетно-посадочных полос сводится к минимуму с помощью определения степени опасности существующих ветровых условий в заранее выбранной точке траектории и прогноза движения спутного следа, в частности, удаления вихря от траектории полета при измеренных метеоусловиях. Однако применение указанной системы предполагает возможность снижения минимального расстояния между судами в зависимости от реальных погодных условий в каждой реальной ситуации, что является недопустимым для планирования и диспетчеризации полетов в условиях обязательного выполнения установленных нормативов эшелонирования.
Известно, что для уклонения от входа в опасную зону вихревого следа или в опасную зону турбулентности маневрирование может быть произведено с согласованным изменением величины текущей скорости самолета, например, путем согласованного расчетного изменения тяги или мощности двигателя.
Например, известно навигационное устройство для ухода пассажирского самолета из зоны турбулентности (JP, 2000062698, А1) путем оценки обнаруженной турбулентности, формирования маршрута полета и быстрого изменения маршрута самолета для выхода из зоны турбулентности. Причем, когда зона турбулентности обнаружена и проанализирована системой управления полетом, в кабину пилота подается аварийный сигнал, и одновременно включается устройство автоматической корректировки мощности двигателя, и автоматическим рулевым устройством непрерывно управляют, чтобы избежать входа самолета в такое воздушное пространство путем ввода в действие системы управления полетом для необходимого минимального изменения маршрута полета.
Известен способ управления вихревой безопасностью самолета при эшелонировании (US, 2008030375, А1), в котором на основе информации о лидирующем и о последующем самолетах и данных о погоде формируют прогноз будущей позиции вихревого следа лидирующего самолета и прогноз будущей позиции последующего самолета; определяют, будет ли будущая позиция последующего самолета пересекать будущую прогнозируемую позицию вихревого следа, генерированного лидирующим самолетом в точке пересечения, и передают предупреждение управлению воздушным движением, касающееся точки указанного пересечения; определяют коррекцию курса последующего самолета, совместимую с графиком, для уклонения от точки пересечения с вихревым следом, и передают коррекцию курса управлению движением. При этом система принятия решения не является быстродействующей, решение об изменении курса принимает диспетчер управления движением и сообщает пилоту последующего самолета скорректированные данные его последующих полетных параметров.
Однако описанные выше навигационное устройство (JP, 2000062698, А1) и способ управления вихревой безопасностью самолета при эшелонировании (US, 2008030375, А1) не могут быть применены для полета след в след в условиях вихревой опасности с соблюдением нормативно установленных минимальных дистанций эшелонирования, так как маневрирование с временным изменением курса и последующим возвратом на первоначально заданный курс требует значительного пространства, времени и топлива и может привести к нежелательному значительному увеличению расстояния между самолетами и снижению пропускной способности аэропорта.
Кроме того, авторы отмечают, что описанные выше способы предоставляют пилоту визуализацию не реальных, а прогнозируемых ситуаций, которые требуют от пилота логических выводов для исключения входа в область прогнозируемой опасности путем изменения полетных характеристик, совершения маневра уклонения с изменением курса и/или положения самолета в пространстве в согласованных с диспетчером пределах, что приводит к опасности значительного влияния на процесс управления полетом «человеческого фактора», обусловленного опытом пилота и диспетчера полетов и их способностью к принятию быстрых самостоятельных решений, при этом не гарантируя соблюдение требований по эшелонированию и обеспечения требуемого уровня безопасности при разрешении конфликтных ситуаций в реальном масштабе времени в реальной ситуации.
Целью настоящего изобретения является создание способа контроля и коррекции дистанций эшелонирования при выполнении полетов самолетов друг за другом, обеспечивающего повышение пропускной способности аэропортов без снижения уровня вихревой безопасности при соблюдении установленных нормативных дистанций продольного эшелонирования.
При создании настоящего изобретения была поставлена задача создания способа и бортовой системы обеспечения нормативно установленных минимумов дистанций продольного эшелонирования при выполнении полета второго самолета за первым самолетом при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, путем непрерывного контроля уровня вихревой безопасности полета второго самолета и управления скоростью второго самолета в ситуации снижения уровня вихревой безопасности для обеспечения расстояния между самолетами, превышающего нормативно установленный минимум дистанции продольного эшелонирования на величину допустимого превышения, определенную с учетом способности второго самолета изменять скорость движения по команде торможения или команде ускорения.
Поставленная задача была решена разработкой способа обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа при движении, по меньшей мере, одного лидирующего первого самолета, генерирующего вихревой след, и второго самолета, следующего за ним, при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, в котором:
- выбирают величину буферной зоны, обеспечивающую способность реагирования пилота и системы управления второго самолета на команду изменения скорости его движения;
- определяют величину рекомендуемой максимальной дистанции между первым и вторым самолетами как сумму величины нормативно установленной минимальной дистанции эшелонирования для взаимодействия первого и второго самолетов в условиях турбулентности вихревого следа и величины буферной зоны и при этом максимально рекомендуемую дистанцию определяют как расстояние вдоль линии визирования, соединяющей центры масс первого и второго самолетов;
- определяют величину контрольной дистанции как среднее арифметическое величины указанной нормативной минимальной дистанции эшелонирования и величины рекомендуемой максимальной дистанции для контроля отклонений от нее текущей реальной дистанции;
- непрерывно определяют величину текущей реальной дистанции между первым и вторым самолетами и производят ее сравнение с величинами рекомендуемой максимальной дистанции, контрольной дистанции и минимальной дистанции эшелонирования для определения событий превышения, равенства или уменьшения величины реальной дистанции в сравнении с указанными величинами;
- производят непрерывное наблюдение воздушного пространства по курсу движения второго самолета в моделируемой контрольной плоскости на границе буферной зоны с нормативной минимальной дистанцией эшелонирования, и делают заключение о присутствии или отсутствии турбулентности вихревого следа в указанной контрольной плоскости и о степени ее опасности для второго самолета;
- при обнаружении в контрольной плоскости турбулентности вихревого следа, представляющей опасность для второго самолета, производят оценку риска взаимодействия второго самолета с указанной турбулентностью и, в случае превышения полученной оценки риска над допустимым порогом риска, определяют зону расположения указанной турбулентности как недопустимую зону входа в нее второго самолета;
- формируют команду торможения в случае обнаружения недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции;
- формируют команду торможения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции,
- формируют команду торможения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции, равной нормативной минимальной дистанции эшелонирования;
- формируют команду ускорения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции больше величины контрольной дистанции;
- формируют команду ускорения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции больше рекомендуемой максимальной дистанции;
- в динамическом режиме сохраняют и передают в управление движением:
- информацию о взаимном положении второго и первого самолетов по курсу движения второго самолета;
- информацию о величине выбранной буферной зоны;
- информацию о величине рассчитанной рекомендуемой максимальной дистанции;
- информацию о величине рассчитанной контрольной дистанции;
- информацию о величине реальной дистанции между первым и вторым самолетами;
- информацию о необходимости перехода в режим торможения, о поступлении в систему управления второго самолета команды торможения, о движении второго самолета в режиме торможения, об окончании режима торможения;
- информацию о необходимости перехода в режим ускорения, о поступлении в систему управления второго самолета команды ускорения, о движении второго самолета в режиме ускорения, об окончании режима ускорения;
- в динамическом режиме отображают на экране дисплея второго самолета, по меньшей мере, информацию о величине реальной дистанции между первым и вторым самолетом и с помощью, по меньшей мере, световой индикации информацию о необходимости перехода в режим торможения, событие поступления команды торможения, о выполнении режима торможения, об окончании режима торможения; информацию о необходимости перехода в режим ускорения, событие поступления в систему управления второго самолета команды ускорения, о выполнении режима ускорения, об окончании режима ускорения;
- предоставляют пилоту второго самолета возможность в течение времени соответствующей световой индикации реализовать режим торможения или режим ускорения с помощью стандартных приемов торможения или ускорения, или поддерживать достигнутый режим без изменений.
При этом, согласно изобретению, целесообразно световую индикацию режима торможения, режима ускорения и режима постоянной скорости осуществлять с помощью активации индикаторов различного цвета.
При этом, согласно изобретению, целесообразно событие поступления команды торможения и событие поступления команды ускорения отображать прерывистой световой индикацией.
При этом, согласно изобретению, целесообразно нормативную минимальную дистанцию эшелонирования для условий турбулентности вихревого следа при продольном эшелонировании определять с учетом типа и категорий первого и второго самолетов.
При этом, согласно изобретению, целесообразно вычислять текущую реальную дистанцию между самолетами на основе данных об их скоростях и размещении в пространстве.
При этом, согласно изобретению, целесообразно анализ опасности турбулентности вихревого следа производить на основе данных о его циркуляциях, расстоянии между циркуляциями и расположении циркуляций от точки пересечения линии визирования с контрольной плоскостью.
Поставленная задача была также решена созданием бортовой системы обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа при движении, по меньшей мере, одного лидирующего первого самолета, генерирующего вихревой след, и второго самолета, следующего за ним, при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, содержащей соединенные с электронно-вычислительным устройством самолета, системой наблюдения самолета, системой управления самолетом и системой связи самолета средство контроля дистанций, средство контроля турбулентности вихревого следа, средство контроля динамики полета и средство визуализации, при этом:
- средство контроля дистанций содержит блок приема данных, блок передачи данных, блок расчета дистанций, блок моделирования контрольной плоскости и блок сравнения дистанций и приспособлено:
- для получения и сохранения информации и формирования баз данных, содержащих, по меньшей мере: данные текущих параметров движения самолетов, в отношении которых предполагается обеспечение минимальной дистанции эшелонирования; данные нормативно установленных минимальных дистанций эшелонирования для взаимодействия самолетов в условиях турбулентности вихревого следа; данные, характеризующие возможности самолета изменять режим скорости,
- для выбора величины буферной зоны, обеспечивающей возможность реагирования пилота и системы управления второго самолета на команду изменения скорости его движения и для сохранения величины буферной зоны в памяти электронного средства на борту второго самолета;
- для расчета величины рекомендуемой максимальной дистанции, совпадающей с линией визирования и соединяющей центры масс первого и второго самолетов, как суммы величины нормативно установленной минимальной дистанции эшелонирования и величины буферной зоны и для сохранения величины рекомендуемой максимальной дистанции в памяти электронного средства на борту самолета;
- для определения величины контрольной дистанции как среднего арифметического величины указанной нормативной минимальной дистанции эшелонирования и величины рекомендуемой максимальной дистанции;
- для моделирования контрольной плоскости на границе буферной зоны с нормативно установленной минимальной дистанцией эшелонирования перпендикулярно линии визирования;
- для непрерывного расчета текущей реальной дистанции между первым и вторым самолетами по линии визирования и ее непрерывного сравнения с величиной рекомендуемой максимальной дистанции, величиной контрольной дистанции и величиной нормативной минимальной дистанции эшелонирования;
- для формирования заключения о событии превышения, равенства или уменьшения величины реальной дистанции по отношению к рекомендуемой максимальной дистанции, контрольной дистанции и нормативной минимальной дистанции эшелонирования;
- для передачи сформированных указанных заключений средству контроля динамики полета самолета и в систему связи самолета для передачи в управление движением;
- средство контроля турбулентности вихревого следа содержит блок приема данных, блок передачи данных, блок определения степени опасности вихревого следа и блок вычисления риска взаимодействия самолета с турбулентностью вихревого следа и приспособлено:
- для получения и сохранения информации и формирования баз данных, содержащих, по меньшей мере: данные о характерных величинах циркуляции вихревых следов первого самолета и о расстоянии между циркуляциями вблизи первого самолета и изменении этого расстояния по мере удаления от первого самолета; данные допустимых пороговых значений риска взаимодействия второго самолета с опасной турбулентностью вихревого следа;
- для приема от системы наблюдения самолета результатов сканирования воздушного пространства в области указанной контрольной плоскости на границе буферной зоны с нормативной минимальной дистанцией эшелонирования, содержащих данные о параметрах обнаруженной турбулентности вихревого следа;
- для определения степени опасности турбулентности вихревого следа на указанной границе и оценки риска взаимодействия самолета с опасной турбулентностью вихревого следа путем сравнения величины риска с допустимым пороговым значением риска;
- для формирования заключения о наличии на границе буферной зоны по курсу второго самолета недопустимой зоны входа второго самолета в случае превышения величины риска над пороговым значением или заключения об отсутствии такой зоны;
- для передачи в непрерывном режиме сформированного заключения в средство контроля динамики полета и в систему связи самолета для передачи в управление движением;
- средство контроля динамики полета содержит блок приема данных, блок передачи данных, блок комплексирования данных, блок формирования команды для системы управления самолета и приспособлено:
- для приема от средства контроля дистанций заключений о наступлении следующих событий: превышения величины реальной дистанции над величиной рекомендуемой максимальной дистанции; уменьшения величины реальной дистанции до величины меньше контрольной дистанции, но превышения ее над величиной нормативной минимальной дистанции эшелонирования; равенства величины реальной дистанции величине рекомендуемой максимальной дистанции; уменьшения величины реальной дистанции до величины меньше рекомендуемой максимальной дистанции и превышения над величиной контрольной дистанции;
- для приема от средства контроля турбулентности заключений: о наличии недопустимой зоны на границе буферной зоны в случае превышения расчетной величины риска над пороговым значением; об отсутствии недопустимой зоны на границе буферной зоны в случае, если расчетная величина риска меньше порогового значения;
- для формирования команды торможения в случае обнаружения недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции;
- для формирования команды торможения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции,
- для формирования команды торможения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции, равной нормативной минимальной дистанции эшелонирования;
- для формирования команды ускорения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции больше величины контрольной дистанции;
- для формирования команды ускорения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции больше рекомендуемой максимальной дистанции;
- для передачи системе управления второго самолета команды ускорения или команды торможения;
- средство визуализации приспособлено для формирования и отображения в динамическом режиме на экране дисплея второго самолета, по меньшей мере, информации о величине реальной дистанции, информации о необходимости перехода в режим торможения, о поступлении в систему управления второго самолета команды торможения, о движении второго самолета в режиме торможения, об окончании режима торможения; информации о необходимости перехода в режим ускорения, о поступлении в систему управления второго самолета команды ускорения, о движении второго самолета в режиме ускорения, об окончании режима ускорения; информации о режиме полета с неизменной скоростью.
При этом, согласно изобретению, целесообразно, чтобы средство визуализации было приспособлено для выполнения световой индикации режима торможения, режима ускорения и режима постоянной скорости с помощью активации индикаторов различного цвета.
При этом, согласно изобретению, целесообразно, чтобы средство визуализации было приспособлено для отображения события поступления команды торможения и события поступления команды ускорения прерывистой световой индикацией.
При этом, согласно изобретению, целесообразно, чтобы средство контроля дистанций было приспособлено для определения нормативной минимальной дистанции эшелонирования на основе данных нормативов, установленных для условий турбулентности вихревого следа при продольном эшелонировании с учетом типа и категорий первого и второго самолетов.
При этом, согласно изобретению, целесообразно, чтобы средство контроля дистанций было приспособлено для вычисления текущей реальной дистанции между самолетами на основе данных об их скоростях и размещении в пространстве.
При этом, согласно изобретению, целесообразно, чтобы средство контроля турбулентности вихревого следа было приспособлено для анализа опасности турбулентности вихревого следа на основе данных о его циркуляциях, расстоянии между циркуляциями и расположении циркуляции от точки пересечения линии визирования с контрольной плоскостью.
В дальнейшем способ обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа и бортовая система для его осуществления согласно изобретению поясняется примерами осуществления и прилагаемыми чертежами, на которых представлены:
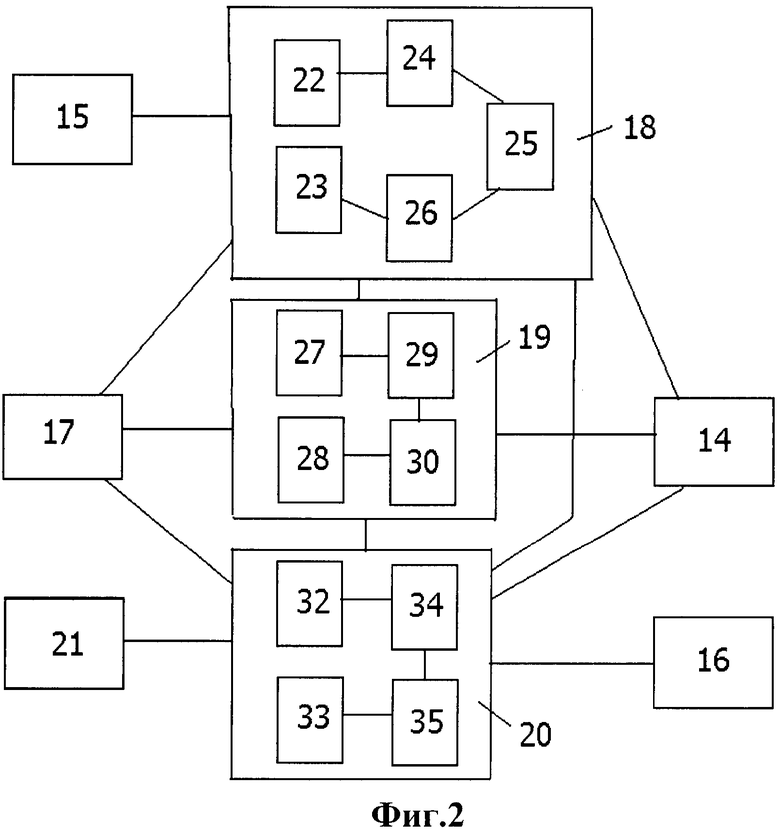
Фиг.1 - схема, иллюстрирующая взаимное положение нормативно установленной минимальной дистанции эшелонирования, буферной зоны, контрольной дистанции и рекомендуемой максимальной дистанции при осуществлении способа согласно изобретению;
Фиг.2 - схема бортовой системы согласно изобретению.
При этом приведенные примеры осуществления изобретения не являются исчерпывающими, не ограничивают возможностей осуществления изобретения и не выходят за рамки формулы изобретения.
Способ обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа согласно изобретению, может быть реализован при движении, по меньшей мере, одного лидирующего первого самолета, генерирующего вихревой след, и второго самолета, следующего за ним, при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, что проиллюстрировано на схеме Фиг.1.
При движении по курсу одного лидирующего самолета 1, генерирующего вихревой след 2, и самолета 3, следующего на текущей реальной дистанции 4 за самолетом 1, например, при полете друг за другом на близких уровнях по высоте, согласно изобретению, должно быть обеспечено соблюдение нормативно установленной минимальной дистанции 5 эшелонирования, которую определяют на основе предоставленных управлением движения данных для условий турбулентности вихревого следа при продольном эшелонировании с учетом типа и категорий самолетов 1 и 3. Согласно способу обеспечения минимумов дистанций продольного эшелонирования, пилот самолета 3 осуществляет выбор величины буферной зоны 6, обеспечивающей возможность реагирования пилота и системы управления самолета 3 на команду изменения скорости его движения. При этом величина буферной дистанции 6 может быть выбрана с учетом квалификации пилота и быстродействия системы управления самолета 3, может изменяться во время полета по мере изменения полетных характеристик самолета, может быть разной для разных типов самолетов.
Согласно изобретению, по направлению вдоль линии 7 визирования, соединяющей центры масс самолетов 1 и 3, определяют расчетную величину рекомендуемой максимальной дистанции 8 как суммы величины установленной минимальной дистанции 5 эшелонирования и величины буферной зоны 6.
Известно, что интенсивность разгона и торможения самолета в полете, близком к горизонтальному, зависит от избыточной тяги, а характеристики разгона самолета в большой степени зависят от степени приемистости двигателя - интервала времени от начала перемещения руля управления движением (РУД) до достижения заданного режима повышенной тяги. Также известно, что для торможения самолета в полете двигатели переводят в режим полетного малого газа, а для повышения лобового сопротивления могут применяться тормозные щитки, выпуск шасси и другие средства. В связи с тем, что согласно способу управление реализацией режима торможения и ускорения самолета предоставлено пилоту, то выполнить команду торможения или ускорения и поддерживать режим торможения или режим ускорения он может с использованием стандартных приемов торможения или ускорения или поддерживать достигнутый режим без изменений, если команда на изменение режима не поступала.
Согласно изобретению, определяют величину контрольной дистанции 9, как среднего арифметического величины указанной нормативной минимальной дистанции 5 эшелонирования и величины рекомендуемой максимальной дистанции 8.
Согласно изобретению, производят моделирование контрольной плоскости 10 на границе 11 буферной зоны 6 с границей нормативной минимальной дистанции 5 эшелонирования. Контрольную плоскость 10 используют для определения присутствия или отсутствия турбулентности вихревых следов на границе 11 буферной зоны 6 по результатам наблюдения воздушного пространства системой наблюдения самолета и для оценки степени их опасности для самолета 3, например, на основе данных, характеризующих в контрольной плоскости 10 циркуляции 12 вихревого следа, расстояние между циркуляциями 12 и расположение циркуляции 12 от точки 13 пересечения линии 7 визирования с контрольной плоскостью 10.
Бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа, согласно изобретению, в варианте, представленном на Фиг.2, содержит соединенные, по меньшей мере, с электронно-вычислительным устройством 14 самолета, системой 15 наблюдения самолета, системой 16 управления самолетом и системой 17 связи самолета средство 18 контроля дистанций средство 19 контроля турбулентности вихревого следа, средство 20 контроля динамики полета и средство 21 визуализации.
Средство 18 контроля дистанций содержит блок 22 приема данных, блок 23 передачи данных, блок 24 расчета дистанций, блок 25 моделирования контрольной плоскости и блок 26 сравнения дистанций и обеспечивает:
- получение и сохранение информации и формирование баз данных;
- определение нормативно установленной минимальной дистанции 5 эшелонирования;
- выбор величины буферной зоны 6 в динамическом режиме и сохранение выбранной величины;
- расчет величины рекомендуемой максимальной дистанции 8 и сохранение расчетной величины;
- расчет величины контрольной дистанции 9 как средней между величинами рекомендуемой максимальной дистанцией 8 и нормативно установленной минимальной дистанцией 5 эшелонирования;
- моделирование контрольной плоскости 10 на границе 11 буферной зоны 6 с нормативно установленной минимальной дистанцией 5 эшелонирования перпендикулярно линии 7 визирования;
- непрерывный расчет текущей реальной дистанции 4 и непрерывное сравнение ее с величиной рекомендуемой максимальной дистанции 8, величиной контрольной дистанции 9 и величиной нормативной минимальной дистанции 5 эшелонирования,
- формирование заключения о событии превышения или уменьшения реальной дистанции 4 по отношению к рекомендуемой максимальной дистанции 8, контрольной дистанции 9 и минимальной дистанции 5 эшелонирования или заключения о равенстве реальной дистанции 4 одной из указанных величин;
- передачу сформированных указанных заключений средству 20 контроля динамики полета самолета 3, электронно-вычислительному устройству 14 и в систему 17 связи самолета для передачи в управление движением.
При этом, согласно изобретению, средство 18 контроля дистанций может быть приспособлено для определения нормативной минимальной дистанции 5 эшелонирования на основе нормативов, установленных для условий турбулентности вихревого следа при продольном эшелонировании с учетом типа и категорий самолетов 1 и 3.
Кроме того, средство 18 контроля дистанций может быть приспособлено для вычисления реальной дистанции 4 на основе данных о скоростях самолетов 1 и 3 и их размещения в пространстве.
При этом блок 22 приема данных, блок 23 передачи данных, блок 24 расчета дистанций, блок 25 моделирования контрольной плоскости и блок 26 сравнения дистанций могут быть выполнены с использованием имеющейся в самолете аппаратуры с применением различных приемлемых вычисляющих алгоритмов.
Средство 19 контроля турбулентности вихревого следа содержит блок 27 приема данных, блок 28 передачи данных, блок 29 определения степени опасности вихревого следа и блок 30 вычисления риска взаимодействия самолета с турбулентностью вихревого следа и обеспечивает:
- получение и сохранение информации и формирование баз данных;
- приема от системы 15 наблюдения самолета результатов сканирования воздушного пространства в области указанной контрольной плоскости 10 на границе 11 буферной зоны 6 с нормативной минимальной дистанцией 5 эшелонирования;
- формирование заключения о наличии на границе 11 буферной зоны 6 по курсу самолета 3 недопустимой для входа самолета 3 зоны 31 (Фиг.1) в случае превышения величины риска над пороговым значением или заключения об отсутствии такой зоны;
- определение степени опасности турбулентности вихревого следа 2 на указанной границе 11 и оценки риска взаимодействия самолета 3 с опасной турбулентностью вихревого следа в недопустимой зоне 31 путем сравнения оценки риска с допустимым пороговым значением риска;
- передачу в непрерывном режиме сформированных заключений электронно-вычислительному устройству 14, средству 20 контроля динамики полета и системе 17 связи самолета 3 для передачи в управление движением.
При этом, согласно изобретению, средство 19 контроля турбулентности вихревого следа может быть приспособлено для анализа степени опасности турбулентности вихревого следа на основе данных о его циркуляциях 12, расстоянии между циркуляциями 12 и расположении циркуляции 12 от точки 13 пересечения линии 7 визирования с контрольной плоскостью 10.
При этом блок 22 приема данных, блок 23 передачи данных, блок 24 расчета дистанций, блок 25 моделирования контрольной плоскости и блок 26 сравнения дистанций могут быть выполнены с использованием имеющейся в самолете аппаратуры с применением различных способов анализа степени опасности турбулентности вихревого следа.
Средство 20 контроля динамики полета содержит блок 32 приема данных, блок 33 передачи данных, блок 34 комплексирования данных, блок 35 формирования команд для системы 16 управления самолета и обеспечивает:
- прием от средства 18 контроля дистанций заключений о наступлении указанных выше событий: превышения величины реальной дистанции 4 над величиной рекомендуемой максимальной дистанции 8; равенства величины реальной дистанции 4 величине рекомендуемой максимальной дистанции 8; величины реальной дистанции 4, равной или больше величины контрольной дистанции 9; величины реальной дистанции 4 меньше величины контрольной дистанции 9; величины реальной дистанции 4, равной нормативной минимальной дистанции 5 эшелонирования;
- прием от средства 19 контроля турбулентности заключения об отсутствии или присутствии недопустимой зоны 31 на границе 11 буферной зоны 6;
- формирование команды торможения в случае присутствия недопустимой зоны 31 на границе 11 буферной дистанции 6 и величины реальной дистанции 4 менее величины контрольной дистанции 9;
- формирование команды торможения в случае отсутствия недопустимой зоны 31 на границе 11 буферной дистанции 6 и величины реальной дистанции 4 менее величины контрольной дистанции 9,
- формирование команды торможения в случае отсутствия недопустимой зоны 31 на границе 11 буферной зоны 6 и величины реальной дистанции 4, равной нормативной минимальной дистанции 5 эшелонирования;
- формирование команды ускорения в случае отсутствия недопустимой зоны 31 на границе 11 буферной дистанции 6 и величины реальной дистанции больше величины контрольной дистанции 9;
- формирование команды ускорения в случае отсутствия недопустимой зоны 31 на границе 11 буферной зоны 6 и величины реальной дистанции 4 больше рекомендуемой максимальной дистанции 8;
- передачу системе 16 управления самолета 3 команды ускорения или команды торможения.
Средство 21 визуализации обеспечивает формирование и отображение в динамическом режиме на экране дисплея самолета 3, по меньшей мере, информации о величине реальной дистанции 4, информации о необходимости перехода в режим торможения, о поступлении в систему 16 управления самолета 3 команды торможения, о движении самолета 3 в режиме торможения, об окончании режима торможения; информации о необходимости перехода в режим ускорения, о поступлении в систему 16 управления самолета 3 команды ускорения, о движении самолета 3 в режиме ускорения, об окончании режима ускорения; информации о режиме полета с неизменной скоростью.
Средство 21 визуализации, согласно изобретению, может быть приспособлено для световой индикации указанной выше информации о торможении, ускорении и движении с постоянной скоростью с помощью активации индикаторов различного цвета и конфигурации, например, по типу светофора: красный индикатор - торможение, зеленый - режим неизменной скорости, синий индикатор - режим ускорения. При этом индикация может быть выполнена в различных режимах прерывания при индикации необходимости перехода в другой режим полета и при индикации о поступлении команды торможения или ускорения в систему 16 управления самолетом 3 и непрерывной - при движении самолета в режиме торможения или ускорения, соответственно.
Указанные средства 18 контроля дистанций, средство 19 контроля турбулентности вихревого следа, средство 20 контроля динамики полета, средство 21 визуализации и содержащиеся в них блоки могут быть выполнены с адаптацией имеющегося на самолете оборудования по выполнению новых задач с применением соответствующих расчетных алгоритмов и программного обеспечения.
Способ обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа согласно изобретению осуществляют с использованием выбранных нормативно установленных минимальных дистанций эшелонирования, рассчитанных величинах рекомендуемой максимальной дистанции 8, контрольной дистанции 9 и буферной зоны 6 и информации баз данных, сформированных средством 18 контроля дистанций и содержащих, по меньшей мере: данные текущих параметров движения самолетов, в отношении которых предполагается обеспечение минимальной дистанции эшелонирования; данные нормативно установленных для взаимодействия самолетов минимальных дистанций эшелонирования в условиях турбулентности вихревого следа; данные, характеризующие способность самолета изменять режим скорости; и информации баз данных, сформированных средством 19 контроля турбулентности вихревого следа и содержащих, по меньшей мере: данные о характерных величинах циркуляции 12 вихревых следов 2 самолета 1 и о расстоянии между циркуляциями 12 вблизи самолета 1 и изменении этого расстояния по мере удаления вихревого следа 2 от самолета 1; данные допустимых пороговых значений риска взаимодействия самолета 2 с опасной турбулентностью вихревого следа.
Для реализации способа согласно изобретению осуществляют с помощью средства 18 контроля дистанций непрерывно расчет реальной дистанции 4 между самолетами 1 и 3 в текущий момент времени, проводят его непрерывное сравнение с имеющимися в базе данных средства 18 контроля дистанций величиной рекомендуемой максимальной дистанции 8, величиной контрольной дистанции 9 и величиной нормативной минимальной дистанции 5 эшелонирования. Формируют с помощью средства 18 контроля дистанций заключение о событии превышения, равенства или уменьшения реальной дистанции 4 по отношению к рекомендуемой максимальной дистанции 9 и к минимальной дистанции 5 эшелонирования или заключение о равенстве реальной дистанции 4 одной из этих величин. Передают сформированные заключения средству 20 контроля динамики полета и в систему 17 связи для передачи в управление движением. Указанные в способе расчеты могут быть выполнены с помощью электронных средств с использованием известных алгоритмов расчетов.
Средство 19 контроля турбулентности вихревого следа принимает непрерывно, от системы 15 наблюдения самолета 3 результаты сканирования воздушного пространства в области контрольной плоскости 10 на границе 11 буферной зоны 4 с нормативной минимальной дистанцией 5 эшелонирования, содержащие данные о параметрах обнаруженной турбулентности вихревого следа, определяет степень опасности турбулентности вихревого следа на указанной границе 11, производит оценку риска взаимодействия самолета 3 с опасной турбулентностью вихревого следа 2 сравнением оценки риска с допустимым пороговым значением риска. В случае превышения величины риска над пороговым значением, средство 19 контроля турбулентности вихревого следа формирует заключение о наличии на границе 11 буферной зоны 6 по курсу самолета 3 недопустимой для входа самолета 3 зоны 31 и, в случае, если риск меньше порогового значения - формирует заключение об отсутствии недопустимой зоны. Средство 19 контроля турбулентности вихревого следа передает в непрерывном режиме сформированные указанные заключения в средство 20 контроля динамики полета и в систему 17 связи самолета 3 для передачи в управление движением.
Средство 20 контроля динамики полета на основе полученного от средства 18 контроля дистанций заключения о событии превышения, равенства или уменьшения величины реальной дистанции 4 по отношению к величинам рекомендуемой максимальной дистанции 8, контрольной дистанции 9 и нормативной минимальной дистанции 5 эшелонирования и полученного от средства 19 контроля турбулентности вихревого следа заключения о наличии или отсутствии на границе 11 буферной дистанции 6 недопустимой для входа самолета 3 зоны 31, формирует команды торможения или ускорения или делает заключение об отсутствии такой необходимости.
В случае актуальности заключения о наличии недопустимой зоны 31 на границе 11 буферной зоны 6 и о величине реальной дистанции 4 менее величины контрольной дистанции 9, то формируется команда торможения, обеспечивающая увеличение реальной дистанции 4 до величины контрольной дистанции 9 и, следовательно, увеличение дистанции между самолетом 3 и границей 11 нормативной минимальной дистанции 5 эшелонирования.
Если одновременно являются актуальными заключения о наличии недопустимой зоны 31 на границе 11 буферной зоны 6 и о величине реальной дистанции 4 менее величины контрольной дистанции 9, то формируется команда торможения, обеспечивающая увеличение реальной дистанции 4, например, до величины контрольной дистанции 9.
Если одновременно являются актуальными заключения о наличии недопустимой зоны 31 на границе 11 буферной зоны 6 и о величине реальной дистанции 4, равной нормативной минимальной дистанции 5 эшелонирования, то формируется команда торможения, обеспечивающая увеличение реальной дистанции 4, например, до величины контрольной дистанции 9.
Если одновременно являются актуальными заключения об отсутствии недопустимой зоны 31 и о величине реальной дистанции 4 больше величины контрольной дистанции 9, но меньше величины рекомендуемой максимальной дистанции 8, то формируется команда ускорения, обеспечивающая уменьшение реальной дистанции 4 до величины контрольной дистанции 9.
Если одновременно являются актуальными заключения об отсутствии недопустимой зоны 31 и о величине реальной дистанции 4 больше величины рекомендуемой максимальной дистанции 8, то формируется команда ускорения, обеспечивающая уменьшение реальной дистанции 4 до величины контрольной дистанции 9.
В течение времени полета самолета 3 в режиме торможения или режиме ускорения реальная ситуация будет подвергаться изменению, и, при поступлении других заключений, средство 20 контроля динамики полета будет формировать другую команду или поддерживать предыдущий режим в зависимости от того, требуется ли изменение скорости самолета для изменения реальной дистанции 4 между самолетами.
Специалистам в области воздушного движения должно быть понятно, что в способе согласно изобретению обеспечивается не только защита последующего самолета 3 от опасности вихревого следа 2 самолета 1 и поддержание нормативно установленной минимальной дистанции 5 эшелонирования, но и компенсируются нарушения дистанций между самолетами, вызванные торможением или ускорением впереди идущего самолета 1.
Информация о реальной полетной ситуации и об ее изменении, приведшем к необходимости быстрого реагирования отображается с помощью средства 21 визуализации на экране дисплея самолета 3 и может содержать информацию о величине реальной дистанции, о необходимости изменения скорости, о поступлении в систему 16 управления самолета 3 команды торможения; о движении самолета 3 в режиме торможения, об окончании режима торможения; о поступлении в систему 16 управления самолета 3 команды ускорения, о движении самолета 3 в режиме ускорения, об окончании режима ускорения; информацию о режиме полета с неизменной скоростью.
При этом средство 21 визуализации может обеспечивать символьную и/или световую индикацию, например, с помощью активации индикаторов различного цвета и конфигурации по типу светофора: красный индикатор - торможение, зеленый - режим неизменной скорости, синий индикатор - режим ускорения. При этом индикация может быть выполнена, например, прерывистой с различными интервалами прерывания сигнала при информировании о необходимости изменения скорости и при поступлении команды в систему 16 управления самолетом и непрерывной - при движении самолета в режиме торможения или ускорения.
Специалистам в области авиационной техники должно быть понятно, что информация от бортовой системы может быть использована для формирования контрольных данных «черного ящика», что позволит в случае опасных коллизий анализировать соблюдение нормативов продольного эшелонирования и действия пилота независимо от действий диспетчера полетов.
Способ и бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа согласно изобретению, по сравнению с известными предлагаемыми и реализованными в настоящее время техническими решениями, имеют очевидные преимущества, так как обеспечивают соблюдение нормативно установленных минимальных дистанций эшелонирования и предлагает пути ее поддержания в установленных пределах без снижения вихревой безопасности, что позволяет улучшить процесс диспетчеризации полетов и увеличить пропускную способность аэропортов, а также исключить в опасных ситуациях влияние на процесс управления полетом «человеческого фактора», обусловленного опытом пилота и диспетчера полетов и их способностью к принятию быстрых самостоятельных решений.
Способ и бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа согласно изобретению могут быть реализованы с использованием известных технологий и оборудования и могут найти применение в самолетах любой категории и назначения, что позволит повысить пропускную способность и снизить вероятность летных происшествий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОСТИ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2003 |
|
RU2324203C2 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
| СПОСОБ КОНТРОЛЯ ДИСТАНЦИЙ МЕЖДУ ВЕДУЩИМ И ВЕДОМЫМ САМОЛЕТАМИ ПРИ ПОЛЕТЕ ПО МАРШРУТУ С ЭШЕЛОНИРОВАНИЕМ ПО ВЫСОТЕ | 2012 |
|
RU2510082C2 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах продольного эшелонирования самолетов. Технический результат - повышение безопасности. Для этого обеспечивают нормативно установленные минимумы дистанций продольного эшелонирования при выполнении полета второго самолета за первым самолетом при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета. При этом осуществляют непрерывный контроль уровня вихревой безопасности полета второго самолета в окружающей его буферной зоне, выбранной по курсу самолета вне нормативного минимума с учетом времени реагирования пилота и системы управления второго самолета на команду изменения скорости его движения. 2 н. и 10 з.п.ф-лы, 2 ил.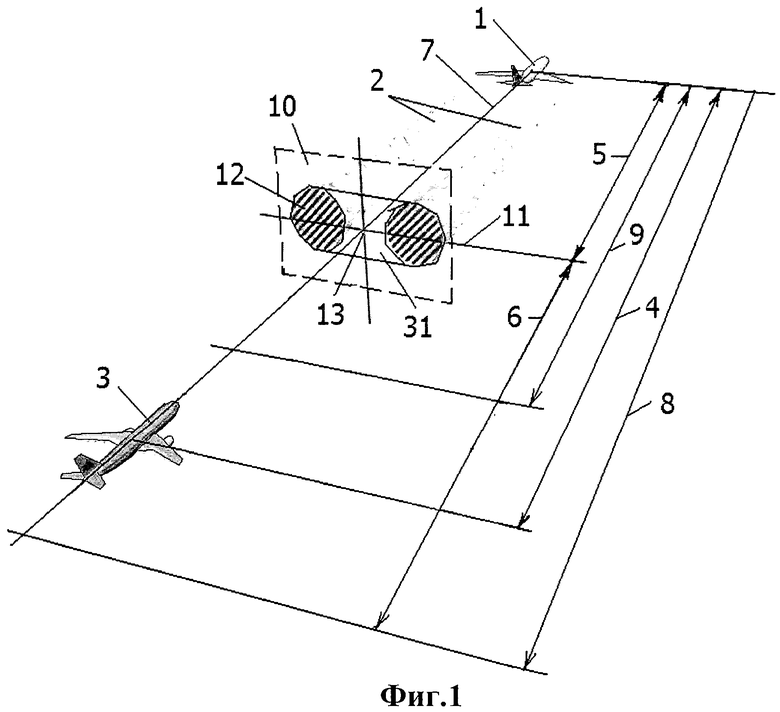
1. Способ обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа при движении, по меньшей мере, одного лидирующего первого самолета, генерирующего вихревой след, и второго самолета, следующего за ним, при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, в котором:
- выбирают величину буферной зоны, обеспечивающую способность реагирования пилота и системы управления второго самолета на команду изменения скорости его движения;
- определяют величину рекомендуемой максимальной дистанции между первым и вторым самолетами как сумму величины нормативно установленной минимальной дистанции эшелонирования для взаимодействия первого и второго самолетов в условиях турбулентности вихревого следа и величины буферной зоны и при этом максимально рекомендуемую дистанцию определяют как расстояние вдоль линии визирования, соединяющей центры масс первого и второго самолетов;
- определяют величину контрольной дистанции как среднего арифметического величины указанной нормативной минимальной дистанции эшелонирования и величины рекомендуемой максимальной дистанции для контроля отклонений от нее текущей реальной дистанции;
- непрерывно определяют величину текущей реальной дистанции между первым и вторым самолетами и производят ее сравнение с величинами рекомендуемой максимальной дистанции, контрольной дистанции и минимальной дистанции эшелонирования для определения событий превышения, равенства или уменьшения величины реальной дистанции в сравнении с указанными величинами;
- производят непрерывное наблюдение воздушного пространства по курсу движения второго самолета в моделируемой контрольной плоскости на границе буферной зоны с нормативной минимальной дистанцией эшелонирования и делают заключение о присутствии или отсутствии турбулентности вихревого следа в указанной контрольной плоскости и о степени ее опасности для второго самолета;
- при обнаружении в контрольной плоскости турбулентности вихревого следа, представляющей опасность для второго самолета, производят оценку риска взаимодействия второго самолета с указанной турбулентностью, и, в случае превышения полученной оценки риска над допустимым порогом риска, определяют зону расположения указанной турбулентности как недопустимую зону входа в нее второго самолета;
- формируют команду торможения в случае обнаружения недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции;
- формируют команду торможения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции,
- формируют команду торможения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции, равной нормативной минимальной дистанции эшелонирования;
- формируют команду ускорения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции больше величины контрольной дистанции;
- формируют команду ускорения в случае отсутствия недопустимой зоны на границе буферной зоны и величины реальной дистанции больше рекомендуемой максимальной дистанции;
- в динамическом режиме сохраняют и передают в управление движением:
- информацию о взаимном положении второго и первого самолетов по курсу движения второго самолета;
- информацию о величине выбранной буферной зоны;
- информацию о величине рассчитанной рекомендуемой максимальной дистанции;
- информацию о величине рассчитанной контрольной дистанции;
- информацию о величине реальной дистанции между первым и вторым самолетами;
- информацию о необходимости перехода в режим торможения, о поступлении в систему управления второго самолета команды торможения, о движении второго самолета в режиме торможения, об окончании режима торможения;
- информацию о необходимости перехода в режим ускорения, о поступлении в систему управления второго самолета команды ускорения, о движении второго самолета в режиме ускорения, об окончании режима ускорения;
- в динамическом режиме отображают на экране дисплея второго самолета, по меньшей мере, информацию о величине реальной дистанции между первым и вторым самолетом и с помощью, по меньшей мере, световой индикации информацию о необходимости перехода в режим торможения, событие поступления команды торможения, о выполнении режима торможения, об окончании режима торможения; информацию о необходимости перехода в режим ускорения, событие поступления в систему управления второго самолета команды ускорения, о выполнении режима ускорения, об окончании режима ускорения;
- предоставляют пилоту второго самолета возможность в течение времени соответствующей световой индикации реализовать режим торможения или режим ускорения с помощью стандартных приемов торможения или ускорения или поддерживать достигнутый режим без изменений.
2. Способ по п.1, в котором световую индикацию о необходимости изменения скорости и о событии поступления команды ускорения отображают прерывистой световой индикацией.
3. Способ по п.1, в котором световую индикацию режима торможения, режима ускорения и режима постоянной скорости осуществляют с помощью активации индикаторов различного цвета.
4. Способ по п.1, в котором минимальную дистанцию эшелонирования определяют на основе данных нормативов величины минимальной дистанции эшелонирования, установленных для условий турбулентности вихревого следа при продольном эшелонировании с учетом типа и категорий первого и второго самолетов.
5. Способ по п.1, в котором текущую реальную дистанцию между самолетами вычисляют на основе данных об их скоростях и размещении в пространстве.
6. Способ по п.1, в котором анализ опасности турбулентности вихревого следа производят на основе данных о его циркуляциях, расстоянии между циркуляциями и расположении циркуляций от точки пересечения линии визирования с контрольной плоскостью.
7. Бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа при движении, по меньшей мере, одного лидирующего первого самолета, генерирующего вихревой след, и второго самолета, следующего за ним, при взлете или посадке их на одну полосу или на две близко расположенные параллельные полосы или при полете друг за другом на близких уровнях по высоте в условиях риска возможного присутствия турбулентности вихревого следа первого самолета по курсу движения второго самолета, содержащая соединенные с электронно-вычислительным устройством самолета, системой наблюдения самолета, системой управления самолетом и системой связи самолета: средство контроля турбулентности вихревого следа, средство контроля динамики полета и средство визуализации, при этом:
- средство контроля дистанций содержит блок приема данных, блок передачи данных, блок расчета дистанций, блок моделирования контрольной плоскости и блок сравнения дистанций и приспособлено:
- для получения и сохранения информации и формирования баз данных, содержащих, по меньшей мере: данные текущих параметров движения самолетов, в отношении которых предполагается обеспечение минимальной дистанции эшелонирования; данные нормативно установленных минимальных дистанций эшелонирования для взаимодействия самолетов в условиях турбулентности вихревого следа; данные, характеризующие возможности самолета изменять режим скорости,
- для выбора величины буферной зоны, обеспечивающей возможность реагирования пилота и системы управления второго самолета на команду изменения скорости его движения и для сохранения величины буферной зоны в памяти электронного средства на борту второго самолета;
- для расчета величины рекомендуемой максимальной дистанции, совпадающей с линией визирования и соединяющей центры масс первого и второго самолетов, как суммы величины нормативно установленной минимальной дистанции эшелонирования и величины буферной зоны и для сохранения величины рекомендуемой максимальной дистанции в памяти электронного средства на борту самолета;
- для определения величины контрольной дистанции как среднего арифметического величины указанной нормативной минимальной дистанции эшелонирования и величины рекомендуемой максимальной дистанции;
- для моделирования контрольной плоскости на границе буферной зоны с нормативно установленной минимальной дистанцией эшелонирования перпендикулярно линии визирования;
- для непрерывного расчета текущей реальной дистанции между первым и вторым самолетами по линии визирования и ее непрерывного сравнения с величиной рекомендуемой максимальной дистанции, величиной контрольной дистанции и величиной нормативной минимальной дистанции эшелонирования;
- для формирования заключения о событии превышения, равенства или уменьшения величины реальной дистанции по отношению к рекомендуемой максимальной дистанции, контрольной дистанции и нормативной минимальной дистанции эшелонирования;
- для передачи сформированных указанных заключений средству контроля динамики полета самолета и в систему связи самолета для передачи в управление движением;
- средство контроля турбулентности вихревого следа содержит блок приема данных, блок передачи данных, блок определения степени опасности вихревого следа и блок вычисления риска взаимодействия самолета с турбулентностью вихревого следа и приспособлено:
- для получения и сохранения информации и формирования баз данных, содержащих, по меньшей мере: данные о характерных величинах циркуляции вихревых следов первого самолета и о расстоянии между циркуляциями вблизи первого самолета и изменении этого расстояния по мере удаления от первого самолета; данные допустимых пороговых значений риска взаимодействия второго самолета с опасной турбулентностью вихревого следа;
- для приема от системы наблюдения самолета результатов сканирования воздушного пространства в области указанной контрольной плоскости на границе буферной зоны с нормативной минимальной дистанцией эшелонирования, содержащих данные о параметрах обнаруженной турбулентности вихревого следа;
- для определения степени опасности турбулентности вихревого следа на указанной границе и оценки риска взаимодействия самолета с опасной турбулентностью вихревого следа путем сравнения величины риска с допустимым пороговым значением риска;
- для формирования заключения о наличии на границе буферной зоны по курсу второго самолета недопустимой зоны входа второго самолета в случае превышения величины риска над пороговым значением или заключения об отсутствии такой зоны;
- для передачи в непрерывном режиме сформированного заключения в средство контроля динамики полета и в систему связи самолета для передачи в управление движением;
- средство контроля динамики полета содержит блок приема данных, блок передачи данных, блок комплексирования данных, блок формирования команды для системы управления самолета и приспособлено:
- для приема от средства контроля дистанций заключений о наступлении следующих событий: превышения величины реальной дистанции над величиной рекомендуемой максимальной дистанции; уменьшения величины реальной дистанции до величины меньше контрольной дистанции, но превышения ее над величиной нормативной минимальной дистанции эшелонирования; равенства величины реальной дистанции величине рекомендуемой максимальной дистанции; уменьшения величины реальной дистанции до величины меньше рекомендуемой максимальной дистанции и превышения над величиной контрольной дистанции;
- для приема от средства контроля турбулентности заключений: о наличии недопустимой зоны на границе буферной зоны в случае превышения расчетной величины риска над пороговым значением; об отсутствии недопустимой зоны на границе буферной зоны в случае, если расчетная величина риска меньше порогового значения;
- для формирования команды торможения в случае обнаружения недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции;
- для формирования команды торможения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции менее величины контрольной дистанции,
- для формирования команды торможения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции, равной нормативной минимальной дистанции эшелонирования;
- для формирования команды ускорения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции больше величины контрольной дистанции;
- для формирования команды ускорения в случае отсутствия недопустимой зоны на указанной границе буферной зоны и величины реальной дистанции больше рекомендуемой максимальной дистанции;
- для передачи системе управления второго самолета команды ускорения или команды торможения;
- средство визуализации приспособлено для формирования и отображения в динамическом режиме на экране дисплея второго самолета, по меньшей мере, информации о величине реальной дистанции, информации о необходимости перехода в режим торможения, о поступлении в систему управления второго самолета команды торможения, о движении второго самолета в режиме торможения, об окончании режима торможения; информации о необходимости перехода в режим ускорения, о поступлении в систему управления второго самолета команды ускорения, о движении второго самолета в режиме ускорения, об окончании режима ускорения; информации о режиме полета с неизменной скоростью.
8. Система по п.7, в которой средство визуализации приспособлено для выполнения световой индикации режима торможения, режима ускорения и режима постоянной скорости с помощью активации индикаторов различного цвета.
9. Система по п.7, в которой средство визуализации приспособлено для отображения информации о необходимости изменения скорости и о событии поступления команды торможения или ускорения прерывистой световой индикацией.
10. Система по п.7, в которой средство контроля дистанций приспособлено для определения нормативной минимальной дистанции эшелонирования на основе нормативов, установленных для условий турбулентности вихревого следа при продольном эшелонировании с учетом типа и категорий первого и второго самолетов.
11. Система по п.7, в которой средство контроля дистанций приспособлено для вычисления текущей реальной дистанции между самолетами на основе данных об их скоростях и размещении в пространстве.
12. Система по п.7, в которой средство контроля турбулентности вихревого следа приспособлено для анализа опасности турбулентности вихревого следа на основе данных о его циркуляциях, расстоянии между циркуляциями и расположении циркуляций от точки пересечения линии визирования с контрольной плоскостью.
| US 20080030375 A1, 02.07.2008 | |||
| WO 2005010554 A1, 03.02.2005 | |||
| DE 10039109 A1, 28.02.2002 | |||
| WO 2006083361 A2, 10.08.2006 |

