Изобретение относится к области систем оптической локации для метеорологических целей и может быть использовано для бесконтактного измерения профилей температуры пограничного слоя атмосферы.
Известно устройство лазерно-акустического зондирования (Пат. США 5221927, МКИ G01S 13/00. Lidar-acoustic sounding of the atmosphere/Palmer A.J. (США); USA Secretary of Commerce (США). - Опубл. 22.06.93), содержащее двухчастотный лазерный источник, акустический источник, фотоприемник, усилитель, анализатор спектра.
Известно также устройство акустооптического измерителя скорости звука (Пат. США 5379270, МКИ G01S 3/80, G01S3/78. Acoustic-optic sound velocity profiler/Connolly George С (США); US ARMY (США). - Опубл. 01.03.95).
Недостатки известных устройств:
1) применение лазера в качестве оптического источника, что приводит к понижению энергетической эффективности и удорожанию системы;
2) известные устройства не учитывают влияние радиальной составляющей скорости ветра, параллельной оси акустического излучателя, что приводит к появлению систематической ошибки измерения температуры.
Наиболее близким по технической сущности к предлагаемому устройству является акустооптический измеритель скорости звука (Пат. США 5379270), принятый за прототип.
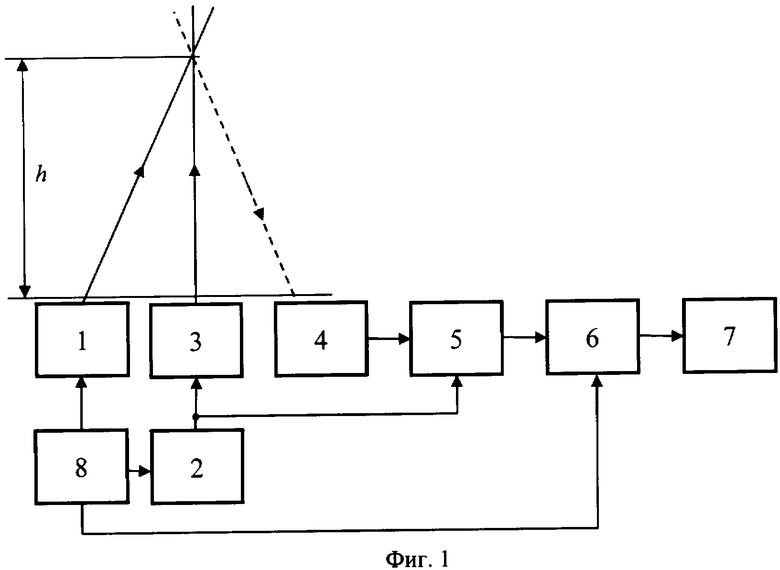
Структурная схема устройства-прототипа представлена на фиг.1, где обозначено:
1 - когерентный оптический источник (лазер);
2 - генератор акустического сигнала;
3 - акустический излучатель;
4 - фотоприемник;
5 - фазовый детектор;
6 - блок обработки;
7 - блок индикации;
8 - блок управления.
Работает устройство-прототип следующим образом.
Гармонический сигнал с выхода генератора акустического сигнала 2 подается на акустический излучатель 3 и излучается в исследуемую среду. Одновременно с этим когерентный оптический источник 1 излучает оптические импульсы так, чтобы они распространялись вдоль оси акустического излучателя. Акустическая волна модулирует плотность исследуемой среды вдоль оси излучателя, что приводит к модуляции мощности рассеянного оптического сигнала, попадающей в фотоприемник 4. Фотоприемник 4 регистрирует рассеянное оптическое излучение, после чего содержащиеся в фотоприемнике полосовой фильтр и демодулятор восстанавливают форму сигнала (гармоническую). Фазовый детектор 5 определяет разность фаз Δϕ модуляции принятого сигнала и излучаемого, по которой блок обработки 6 рассчитывает текущее значение температуры среды и выводит его на индикатор 7. Блок управления 8 синхронизирует работу всего устройства.
Разность фаз Δϕ на выходе блока 5 определяется следующим выражением:

где f - частота акустического излучения;
С - средняя скорость акустической волны на участке длиной h от излучателя 3 до объема, в котором наблюдается рассеяние.
Дальность h, с которой фиксируется рассеянное обратно оптическое излучение
где с - скорость оптического излучения в среде;
t - время с момента излучения оптического импульса.
При измерениях фиксируются значения разности фаз Δϕ1, Δϕ2,... Δϕn в соответствующие моменты времени t1, t2,... fn, отсчитываемые от момента излучения оптического импульса. Этим моментам согласно выражению (2) соответствуют дальности h1, h2,... hn.
Среднее значение скорости звука на удаленном отрезке hi-hi-1

Набор средних значений скорости звука С1, С2,... Сn является профилем скорости звука.
Скорость звука в среде однозначно связана с температурой среды, в частности для атмосферы Земли используется выражение

где Т - абсолютная температура атмосферы.
Из (3) и (4) следует
или

если обозначить di=hi-hi-1.
Недостатком устройства-прототипа является низкая энергетическая эффективность системы; систематическая ошибка в измерении температуры при наличии радиальной составляющей скорости ветра.
Задачей изобретения является повышение энергетической эффективности и точности системы.
Техническое решение задачи заключается в том, что в акустооптический локатор, содержащий оптический источник, генератор акустического сигнала, соединенный с акустическим излучателем, фотоприемник, блок обработки, блок индикации и блок управления, синхронизирующий работу оптического источника, генератора акустического сигнала и блока обработки, дополнительно введены k фотоприемников (k=1, 2, 3,...), при этом (k+1) фотоприемников установлены таким образом, что оси их оптической системы пересекаются с осью оптического источника в точках, лежащих внутри области исследуемой среды, в которой также распространяется акустическая волна от акустического излучателя, (k+1) частотомеров, подключенных входами к соответствующим фотоприемникам, а выходами к блоку обработки, и k фазовых детекторов, подключенных входами к выходам соседних фотоприемников, а выходами к блоку обработки, причем блок обработки проводит вычисления профиля температуры исследуемой среды с исключением систематической ошибки измерения температуры, обусловленной радиальной составляющей скорости ветра, а в качестве оптического источника используют некогерентный оптический источник.
Структурная схема предлагаемого устройства приведена на фиг.2, где обозначено:
1 - некогерентный оптический источник;
2 - генератор акустического сигнала;
3 - акустический излучатель;
41-4k+1 - (k+1) фотоприемников;
51-5k - k фазовых детекторов;
6 - блок обработки;
7 - блок индикации;
8 - блок управления;
91-9k+1 - (k+1) частотомеров.
Работает предлагаемое устройство следующим образом.
Оптический источник 1, акустический излучатель 3 и (k+1) фотоприемников расположены в пространстве таким образом, чтобы точки пересечения оси оптического источника 1 и осей оптических систем фотоприемников располагались внутри акустического луча (фиг.2). Крайние точки пересечения осей определяют границы той области в среде, в которой производятся измерения температуры.
Гармонический сигнал с выхода генератора акустического сигнала 2 подается на акустический излучатель 3 и излучается в исследуемую среду. Некогерентный оптический источник 1 во время работы системы непрерывно излучает оптическую энергию в виде узкого луча. Акустическая волна модулирует плотность исследуемой среды вдоль оси излучателя, что приводит к модуляции мощности рассеянного оптического сигнала, попадающей в фотоприемники 41-4k+1. Сигнал с выходов фотоприемников подается на фазовые детекторы 51-5k, измеряющие разность фаз Δϕi между соседними фотоприемниками, и на частотомеры 91-9k+1, измеряющие частоту выходного сигнала фотоприемников. Результаты измерений передаются в блок обработки 6, который проводит вычисления профиля температуры и выводит значения на блок индикации 7. Блок управления 8 синхронизирует работу всего устройства.
Средняя температура на участке di равна

где fi - средняя частота модуляции принятого оптического сигнала, рассчитанная по показаниям частотомеров 9i-1 и 9i.
Из-за переноса вещества атмосферы ветром частота модуляции сигнала в фотоприемнике f отличается от частоты акустического источника fi. Связывающее их выражение:
где Vi - радиальная составляющая скорости, направленная к акустическому излучателю, средняя по участку di.
Таким образом, в предлагаемом устройстве исключена систематическая ошибка измерения температуры, обусловленная радиальной составляющей скорости ветра, которая в устройстве-прототипе составляет

В абсолютных числах, радиальная скорость ветра 1 м/с приводит к систематической ошибке измерения в прототипе 1.4-1.8°С в диапазоне температур атмосферы от -70 до +50°С.
Вследствие того, что в предлагаемом устройстве пространственное разрешение измерений обеспечивают за счет использования набора из n фотоприемников (а не за счет импульсной модуляции излучения оптического источника, как в устройстве-прототипе), в предлагаемом устройстве используют немодулированное непрерывное оптическое излучение. Т.к. мощность оптического рассеяния не зависит от соотношения длин волн оптического излучения и частоты акустического излучения, модулирующего плотность среды, и, кроме того, на оптический источник не накладываются ограничения, связанные с модуляцией короткими импульсами, то в предлагаемом устройстве используют некогерентный оптический источник.
При одинаковых средних мощностях некогерентный оптический источник является более эффективным по энергетическим затратам, имеет меньшие габариты и стоимость по сравнению с лазером. Поэтому предлагаемое устройство является более эффективным энергетически по сравнению с прототипом.
Изобретение относится к области систем оптической локации для метеорологических целей и может быть использовано для бесконтактного измерения профилей температуры пограничного слоя атмосферы. Достигаемым техническим результатом является повышение энергетической эффективности системы и повышение точности измерений температуры. Указанный результат достигается за счет того, что акустооптический локатор содержит оптический источник, генератор акустического сигнала, (k+1) фотоприемников, где (k=1, 2, 3,...), блок обработки, блок индикации, блок управления, (k+1) частотомеров и (k+1) фазовых детекторов, соединенных определенным образом между собой, причем в качестве оптического источника используют некогерентный оптический источник. 2 ил.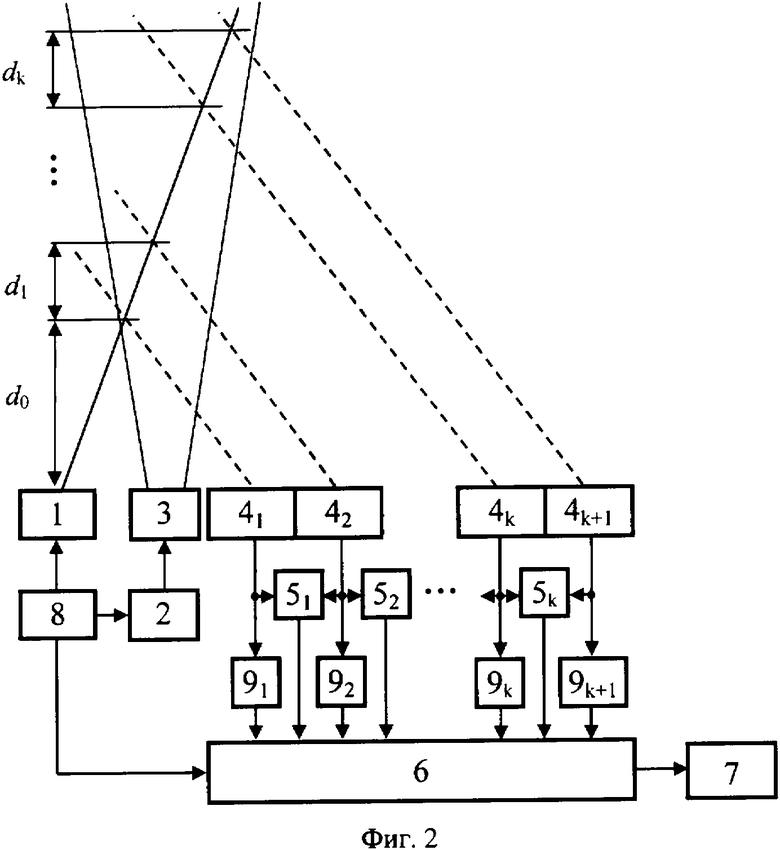
Акустооптический локатор, содержащий оптический источник, генератор акустического сигнала, соединенный с акустическим излучателем, фотоприемник, блок обработки, блок индикации и блок управления, синхронизирующий работу оптического источника, генератора акустического сигнала и блока обработки, отличающийся тем, что дополнительно введены k фотоприемников (k=1, 2, 3,...), при этом (k+1) фотоприемников установлены таким образом, что оси их оптической системы пересекаются с осью оптического источника в точках, лежащих внутри области исследуемой среды, в которой также распространяется акустическая волна от акустического излучателя, (k+1) частотомеров, подключенных входами к соответствующим фотоприемникам, а выходами - к блоку обработки, и k фазовых детекторов, подключенных входами к выходам соседних фотоприемников, а выходами - к блоку обработки, причем блок обработки проводит вычисления профиля температуры исследуемой среды с исключением систематической ошибки измерения температуры, обусловленной радиальной составляющей скорости ветра, а в качестве оптического источника используют некогерентный оптический источник.
| US 5379270 А, 03.01.1995 | |||
| RU 805785 A1, 20.07.1999 | |||
| RU 2071159 C1, 27.12.1996 | |||
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| US 2006139657 A1, 29.06.2006 | |||
| EP 1676151 A1, 05.07.2006. | |||

