Изобретение относится к электротехнике и может быть использовано в широкорегулирумых асинхронных электроприводах.
Известен способ обеспечения живучести пяти- или семифазных асинхронных двигателей с векторным управлением от преобразователя частоты (Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase / Fu Jen-Ren, Lipo Thomas A. // IEEE Trans. Ind. Appl. - 1994. - 30, №5. - С.1267-1274), в котором при обрыве одной из фаз в преобразователе частоты задают соответствующую комбинацию токов для поддержания момента двигателя без пульсаций, при этом исключают провод соединения с нейтралью, т.к. наличие нулевой последовательности токов в отличие от 3-фазного асинхронного двигателя будет необязательным.
Недостатком данного способа является ограниченная область применения для многофазных асинхронных двигателей, что не позволяет использовать предложенный способ при трехфазном исполнении двигателя.
Известен способ обеспечения живучести трехфазного асинхронного двигателя для привода эскалатора (Патент JP №3293289, МПК В66В 23/02, опубл. 24.12.1991), в котором осуществляют восстановление работоспособности при неисправности силовой части преобразователя частоты: выпрямитель - инвертор. Живучесть обеспечивают диагностикой с последующим отключением питания двигателя от преобразователя частоты и переключением его напрямую к трехфазной сети переменного тока.
Недостатком этого способа является уменьшение равномерности движения эскалатора при отключении преобразователя частоты вследствие скачкообразного уменьшения или увеличения частоты вращения вала двигателя в зависимости от степени загруженности эскалатора и следствием этого - ограниченная применимость данного способа, а также невозможность работы данного электропривода при обрыве фазы двигателя, непосредственно питающей статорную обмотку.
Известен способ обеспечения живучести асинхронного электропривода (Fault mode single-phase operation of a variable frequency induction motor drive and improvement of pulsating torque characteristics. / Kastha Debaprasad, Bose Bimal K. // IEEE Trans. Ind. Electron. - 1994. - 41, №4. - С.426-433), в котором при обрыве фазы или отключении ее из-за неисправности вводят гармоники напряжения для нейтрализации второй и других гармоник пульсаций момента и сдвигают частоты пульсаций момента в более высокий диапазон спектра, что позволяет компенсировать пульсации момента за счет момента инерции двигателя. Для регулирования электроприводом в двухфазном режиме в преобразователь частоты вводят оптимальное соотношение напряжения и частоты U/f для получения максимального отношения момент/ток и уменьшения пульсаций момента, что обеспечивает приемлемую работу с регулированием частоты вращения вала двигателя.
Недостатком способа является невозможность применения предложенного технического решения в случае глубокорегулируемого электропривода, особенно в диапазоне низких частот вращения.
Известен способ управления электроприводом (патент РФ №2109397, МПК 6 Н02Р 5/408, опубл. 04.20.1998), выбранный в качестве прототипа, заключающийся в том, что фазные обмотки статора двигателя запитывают от трехфазного тиристорного преобразователя частоты с непосредственной связью и естественной коммутацией, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналам задания на токи, формируемым на выходе регулятора скорости, на входы которого подают сигнал задания частоты вращения и фазные ЭДС двигателя. Задающим генератором регулятора скорости управляют сигналом задания на частоту, вырабатывая на его выходе трехфазные системы сигналов задания на базисные токи и базисные ЭДС, находящиеся соответственно в квадратуре, модули которых определяют соответствующими сигналами задания. Сигнал задания на модуль базисной ЭДС определяют умножением сигнала задания модуля базисного тока на сигнал задания на частоту, сигнал задания на модуль базисного тока определяют суммированием сигнала задания на модуль базисного тока в режиме холостого хода и модуля сигнала приращения сигнала задания на ток, который получают интегрированием разности сигнала задания на базисную ЭДС данной фазы и ЭДС соответствующей фазы двигателя. Сигнал задания на ток каждой фазы определяют суммированием сигнала задания на базисный ток данной фазы и соответствующего сигнала приращения сигнала задания на ток.
Недостатком способа является невозможность обеспечения живучести электропривода в случае обрыва в одной из фаз двигателя и отказа в одной из ячеек преобразователя частоты.
Задачей изобретения является обеспечение живучести трехфазного асинхронного двигателя при аварийном отключении одной из фаз путем сохранения кругового вращающегося поля.
Поставленная задача решена за счет того, что в способе управления и обеспечения живучести трехфазного асинхронного двигателя, так же как в прототипе, фазные обмотки статора двигателя запитывают от трехфазного преобразователя частоты, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналам задания на токи, формируемым на выходе регулятора скорости, на входы которого подают сигнал задания частоты вращения, а на его выходе получают трехфазные системы сигналов задания на фазные токи.
Согласно заявленному способу одновременно с вышеизложенным непрерывно определяют частоту вращения вала двигателя и проводят анализ фазных токов двигателя на каждом интервале широтно-импульсной модуляции и в случае обнаружения отказа в одной из фаз двигателя корректируют мгновенные значения токов в двух оставшихся фазах асинхронного двигателя по выражениям для опережающей фазы вектора тока:



для отстающей фазы вектора тока:



где Iω - значение амплитуды формируемых фазных токов, А;
σ - число двоичных разрядов выходного кода цифрового сигнала, полученного в результате интегрирования сигнала с датчика скорости;
а, b, с - три бита отказа каждой фазы;



 - инверсные значения а, b, с, d;
- инверсные значения а, b, с, d;
α - значение текущего двоичного кода цифрового сигнала, полученного в результате интегрирования сигнала с датчика скорости;
d - значение бита, вычисляемого по логическому выражению d=a∪b∪c (∪ - логическая операция ИЛИ); если d=1, то это свидетельствует об отказе в одной из фаз двигателя.
Поставленная задача достигается тем, что в случае обнаружения отказа в одной из фаз двигателя включают алгоритм восстановления работоспособности, при котором корректируют мгновенные значения токов в двух оставшихся фазах асинхронного двигателя, т.е. меняют порядок чередования фаз и угол сдвига фаз между оставшимися фазами с 2π/3 на π/2 (1)-(6). Таким образом, предложенное решение позволяет обеспечить сохранение кругового вращающегося поля двигателя и направления вращения вала двигателя с расширенным диапазоном регулирования, а также обеспечить 100% вероятность пуска в заданном направлении. Время реакции микропроцессорной системы управления при переключении алгоритма восстановления из трехфазного в двухфазный режим равно времени интервала широтно-импульсной модуляции при отсутствии дополнительных аппаратных затрат для поддержки алгоритма восстановления работоспособности.
На фиг.1 представлена функциональная схема микроконтроллерной системы управления трехфазным асинхронным двигателем.
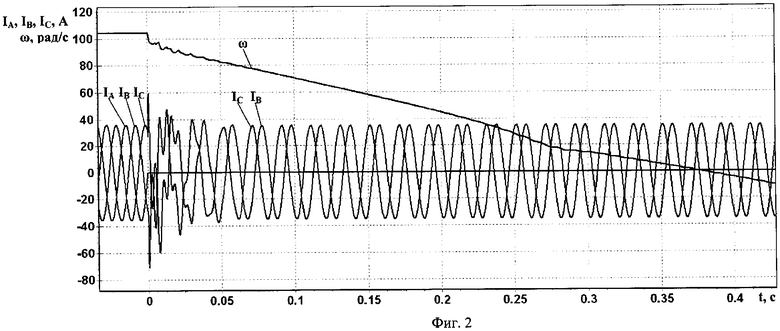
На фиг.2 представлены временные диаграммы переходных процессов токов статора в фазах А, В, С: IA, IB, IC и частоты вращения вала двигателя ω при переключении из рабочего 3-х фазного в аварийный 2-х фазный режим работы для неконтролируемой аварийной ситуации.
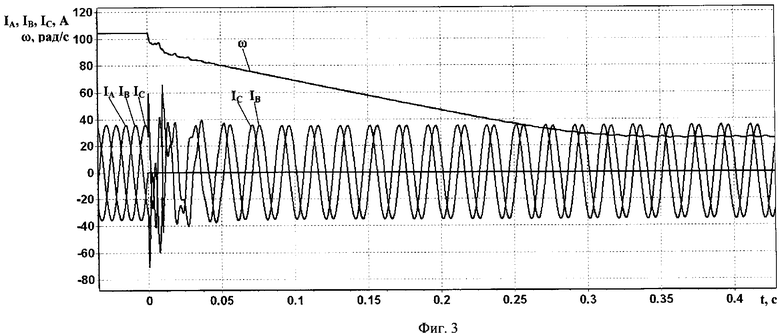
На фиг.3 представлены временные диаграммы переходных процессов токов статора в фазах А, В, С: IA, IB, IC и частоты вращения вала двигателя ω при переключении из рабочего 3-х фазного в аварийный 2-х фазный режим работы при активизированном алгоритме восстановления.
Предложенный способ осуществлен с помощью следующей схемы, изображенной на фиг.1, где асинхронный двигатель 1 (АД) через датчики тока 2 (ДТ1), 3 (ДТ2), 4 (ДТ3) подключен к преобразовательным ячейкам 5 (ПЯ1), 6 (ПЯ2) и 7 (ПЯ3) трехфазного преобразователя частоты, к которым подключен блок диагностики 8 (БД), связанный с микроконтроллером 9 (МК). Выходы датчиков тока 2 (ДТ1), 3 (ДТ2), 4 (ДТЗ) подключены к микроконтроллеру 9 (МК). На валу асинхронного двигателя 1 (АД) установлен датчик скорости 10 (ДС), выход которого подключен к микроконтроллеру 9 (МК). Задатчик частоты вращения вала двигателя 11 (ЗЧВ) подключен к микроконтроллеру 9 (МК), который также связан с преобразовательными ячейками 5 (ПЯ1), 6 (ПЯ2), 7(ПЯ3).
В качестве асинхронного двигателя 1 (АД) можно выбрать любой трехфазный асинхронный двигатель с развязанными фазами, т.е. начало и конец каждой статорной обмотки выведены в коробку выводов, например АДМ63В4У3. В качестве датчиков тока 2 (ДТ1), 3 (ДТ2), 4 (ДТ3) могут быть использованы стандартные датчики с гальванической развязкой, например модули ЛЕМ типа LA 25-NP. Датчик скорости 10 (ДС) может быть любого типа с аналоговым или цифровым выходом, например BE 178A. В качестве микроконтроллера 9 (МК) может быть выбран одноплатный микроконтроллер типа АТ89С2051 с тактовой частотой 4 МГц. В качестве преобразовательных ячеек 5 (ПЯ1), 6 (ПЯ2), 7(ПЯ3) трехфазного преобразователя частоты использован инвертор, выполненный по мостовой или полумостовой схеме. Задатчик частоты вращения 11 (ЗЧВ) может быть выполнен в виде блока, вырабатывающего аналоговый или цифровой сигнал задания. Вариант исполнения блока диагностики 8 (БД) описан в [Однокопылов Г.И. Датчик состояния преобразовательной ячейки // IV Международная научно-техническая конференция «Микропроцессорные, аналоговые и цифровые системы: проектирование и схемотехника, теория и вопросы применения», Новочеркасск: Изд-во ЮРГТУ 2004. - 70 с.].
Для проверки способа управления и обеспечения живучести трехфазного асинхронного двигателя использовали математическую модель [Свидетельство РФ о регистрации ПрЭВМ №2005612119 «Программа расчета переходных процессов асинхронного двигателя с электромагнитным тормозным устройством»]. Входной величиной электропривода является сигнал с задатчика частоты вращения 11 (ЗЧВ), который поступает в микроконтроллер 9 (МК). Фазные токи двигателя, определяемые с помощью датчиков тока 2 (ДТ1), 3 (ДТ2), 4 (ДТ3), и частота вращения вала двигателя, которая определяется с помощью датчика скорости 10 (ДС), поступают на регуляторы токов и регулятор скорости соответственно, запрограммированные в микроконтроллере 9 (МК), в котором вырабатывают задания на токи для каждой фазы двигателя, поступающие в преобразовательные ячейки 5 (ПЯ1), 6 (ПЯ2), 7 (ПЯ3) трехфазного преобразователя частоты. Блок диагностики 8 (БД) анализирует состояние преобразовательных ячеек 5 (ПЯ1), 6 (ПЯ2), 7 (ПЯ3) на каждом интервале широтно-импульсной модуляции и вырабатывает три бита отказа а, b, с, составляющих слово состояния электропривода, поступающее в микроконтроллер 9 (МК). В случае обнаружения отказа или в одной из фаз двигателя, или в одной из ячеек преобразователя частоты в микроконтроллере 9 (МК) включают алгоритм восстановления, при котором корректируют мгновенные значения фазных токов асинхронного двигателя 1 (АД) для опережающей фазы вектора тока по выражениям (1), (2), (3), а для отстающей фазы вектора тока по выражениям (4), (5), (6).
На временных диаграммах переходных процессов (фиг.2, 3) представлена работа асинхронного двигателя марки MTF 311-6 с номинальным моментом нагрузки (Мн=111Н·м) на валу при переключении из рабочего 3-х фазного в аварийный 2-х фазный режим работы при отказе в фазе «А» в момент времени, равный t=0 с. При неконтролируемой аварийной ситуации, как видно из фиг.2, ток в отказавшей фазе («А») стал равным нулю, а токи в оставшихся фазах «В» и «С» после электромагнитного переходного процесса t=0,05 с стали такими же, как и в 3-х фазном режиме с углом сдвига фаз между ними, равным 2π/3. При этом частота вращения вала двигателя падает до нуля за время t=0,375 c с последующим опрокидыванием двигателя, т.е. асинхронный двигатель не поддерживает свойство живучести.
При активизированном алгоритме восстановления (фиг.3) токи в двух оставшихся фазах «В» и «С» после электромагнитного переходного процесса t=0,05 с стали по амплитуде такими же, как и в 3-х фазном режиме, но с обратным чередованием и углом сдвига фаз между ними, равным π/2, что определено алгоритмом восстановления (2) и (3) для поддержания кругового вращающегося поля двигателя. После этого происходит падение частоты вращения вала двигателя до уровня 30% относительно работы в трехфазном режиме. Двигатель продолжает работать, поддерживая номинальную нагрузку на валу. То есть использование предложенного способа обеспечивает живучесть трехфазного асинхронного двигателя при аварийном отключении фазы.
Предложенное техническое решение позволяет в случае отказа в одной из фаз двигателя обеспечить сохранение направления вращения, кругового вращающегося поля и 100% вероятность пуска в заданном направлении с расширенным диапазоном регулирования и определенным временем реакции микропроцессорной системы управления при переключении алгоритма восстановления из трехфазного в двухфазный режим, равным времени интервала широтно-импульсной модуляции при отсутствии дополнительных аппаратных затрат для поддержки алгоритма восстановления работоспособности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2009 |
|
RU2410813C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ НА ОСНОВЕ ЯВНОПОЛЮСНОЙ СИНХРОННОЙ МАШИНЫ | 2010 |
|
RU2435291C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2311721C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ВРАЩАТЕЛЬНОГО ИЛИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2460190C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД С ОБЕСПЕЧЕНИЕМ СВОЙСТВА ЖИВУЧЕСТИ | 2011 |
|
RU2447561C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ | 2013 |
|
RU2525294C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2638219C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2657702C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ МНОГОФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2401500C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2576330C1 |
Изобретение относится к области электротехники и может быть использовано в широкорегулирумых асинхронных электроприводах. Техническим результатом является обеспечение живучести трехфазного асинхронного двигателя при аварийном отключении одной из фаз путем сохранения кругового вращающегося поля. В способе управления и обеспечения живучести трехфазного асинхронного двигателя фазные обмотки статора двигателя запитывают от трехфазного преобразователя частоты, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналам задания на токи, формируемым на выходе регулятора скорости, на входы которого подают сигнал задания частоты вращения и текущее значение частоты вращения вала двигателя. На выходе регулятора скорости получают трехфазные системы сигналов задания на фазные токи. Одновременно с вышеизложенным непрерывно проводят анализ фазных токов двигателя на каждом интервале широтно-импульсной модуляции и в случае обнаружения отказа в одной из фаз двигателя корректируют мгновенные значения токов в двух оставшихся фазах асинхронного двигателя по выражениям для опережающей и отстающей фазы вектора тока, указанным в формуле изобретения. 3 ил.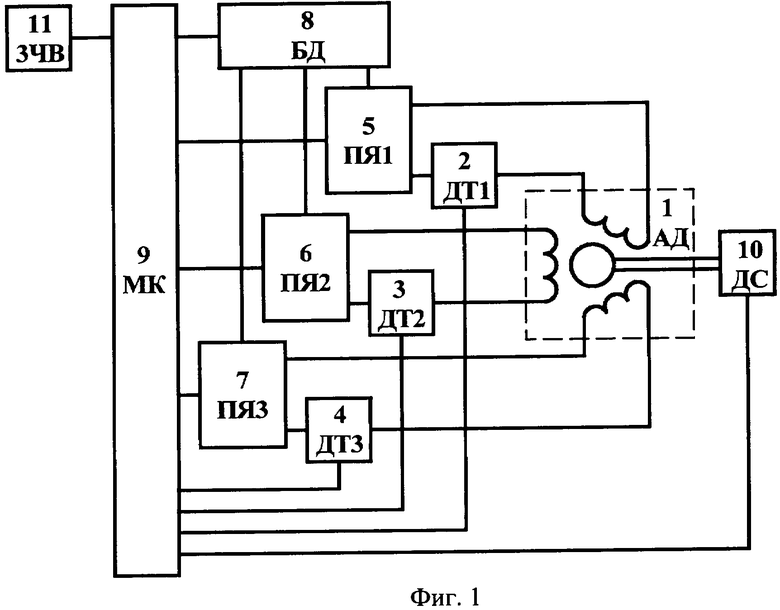
Способ управления и обеспечения живучести трехфазного асинхронного двигателя, заключающийся в том, что фазные обмотки статора двигателя запитывают от трехфазного преобразователя частоты, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналам задания на токи, формируемым на выходе регулятора скорости, на входы которого подают сигнал задания частоты вращения, а на его выходе получают трехфазные системы сигналов задания на фазные токи, отличающийся тем, что одновременно с вышеизложенным непрерывно определяют частоту вращения вала двигателя и проводят анализ фазных токов двигателя на каждом интервале широтно-импульсной модуляции и в случае обнаружения отказа в одной из фаз двигателя корректируют мгновенные значения токов в двух оставшихся фазах асинхронного двигателя по выражениям для опережающей фазы вектора тока:



для отстающей фазы вектора тока:



где Iω - значение амплитуды формируемых фазных токов, А;
σ - число двоичных разрядов выходного кода цифрового сигнала, полученного в результате интегрирования сигнала с датчика скорости;
а, b, с - три бита отказа каждой фазы;



 - инверсные значения а, b, с, d;
- инверсные значения а, b, с, d;
α - значение текущего двоичного кода цифрового сигнала, полученного в результате интегрирования сигнала с датчика скорости;
d - значение бита, вычисляемого по логическому выражению d=a∪b∪c (∪ - логическая операция ИЛИ); если d=1, то это свидетельствует об отказе в одной из фаз двигателя.
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012972C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТНОГО ОТКЛЮЧЕНИЯ ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ОБРЫВЕ СИЛОВОЙ ЦЕПИ | 1992 |
|
RU2117373C1 |
| Устройство для защиты частотно-управляемого электродвигателя | 1991 |
|
SU1823066A1 |
| УСТАНОВКА КОМБИНИРОВАННОЙ ОЧИСТКИ СТОЧНЫХ ВОД | 2004 |
|
RU2270809C2 |
| US 6239566 B1, 29.05.2001 | |||
| DE 4330823 A, 16.03.1995 | |||
| ТОРЦОВЫЙ РАСПРЕДЕЛИТЕЛЬ ОБЪЕМНОЙ РОТОРНОЙ | 0 |
|
SU241853A1 |
| WO 00/30243 A2, 25.05.2000. | |||

