Изобретение относится к области электротехники и может быть использовано для плавного пуска и регулирования частоты вращения ротора асинхронных электроприводов с тиристорным преобразователем напряжения общепромышленного применения, а именно в приводах вентиляторов, компрессоров, насосов, шлифовальных машин, транспортеров, механизмов горизонтального перемещения подъемно-транспортных машин и др.
Известен электропривод переменного тока [Патент РФ 2251204 С1, МПК7 Н02Р 5/28, опубл. 27.04.2005], выбранный в качестве прототипа, содержащий асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчики тока и напряжения двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, а вход - с выходом блока регулятора частоты вращения, один вход которого соединен с выходом блока задания частоты вращения, а другой вход - с выходом функционального блока. Один вход измерителя ЭДС статора подключен к выходу датчика тока, а второй - к выходу датчика напряжения. Выход измерителя ЭДС и датчика напряжения подключены к входам функционального блока, реализующего зависимость расчетного значения частоты вращения от напряжения и ЭДС статора двигателя:
где ω - вычисленное значение частоты вращения;
US - действующее значение напряжения фазы двигателя;
ES - действующее значения ЭДС фазы двигателя.
Это устройство обеспечивает высокую точность оценки частоты вращения асинхронного двигателя только при работе на пониженных скоростях.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Поставленная задача решена за счет того, что так же, как в прототипе, электропривод переменного тока содержит асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчик фазного статорного тока и датчик напряжения, подключенные к одной фазе асинхронного двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, а вход - с выходом блока регулятора частоты вращения, один вход которого соединен с задатчиком частоты вращения.
Согласно изобретению второй вход регулятора частоты вращения соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат, выход которого соединен с первым блоком расчета результирующего модуля тока, который подключен к блоку расчета невязки. Второй датчик статорного фазного тока и второй датчик напряжения подключены к другой фазе асинхронного двигателя. К первому и второму датчику напряжения подключен первый блок преобразования координат, выход которого соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат. Первый и второй датчики статорных фазных токов соединены со вторым блоком преобразования координат, к которому последовательно подключены второй блок расчета результирующего модуля тока, блок расчета невязки, блок определения оценки момента нагрузки, блок имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат.
Предложенное устройство позволяет обеспечить точность определения оценки частоты вращения асинхронного двигателя во всем диапазоне регулирования скорости с погрешностью не более 5% за счет однозначной связи оценки момента нагрузки электродвигателя с напряжениями и статорными фазными токами двигателя.
На фиг.1 приведена структурная схема электропривода переменного тока.
Электропривод переменного тока содержит асинхронный двигатель 1 (АД), подключенный к тиристорному преобразователю напряжения 2 (ТПН), который запитан от сети. Управляющий вход тиристорного преобразователя напряжения 2 (ТПН) подключен к выходу блока управления 3 (БУ), вход которого соединен с выходом блока регулятора частоты вращения 4 (РЧ), один вход которого соединен с выходом задатчика частоты вращения 5 (ЗЧ), а другой вход - с выходом блока имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА), выход которого соединен с блоком расчета результирующего модуля тока 7 (БРМ1), который подключен к блоку расчета невязки 8 (БРН). Датчики статорных фазных токов 9 (ДТ1), 10 (ДТ2) подключены к двум фазам асинхронного двигателя 1 (АД), аналогично подключены датчики напряжений 11 (ДН1), 12 (ДН2) к асинхронному двигателю 1 (АД). Датчики напряжений 11 (ДН1), 12 (ДН2) подключены к перовому блоку преобразования координат 13 (ПК1), выход которого соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА). Датчики статорных фазных токов 9 (ДТ1), 10 (ДТ2) соединены с вторым блоком преобразования координат 14 (ПК2), к которому последовательно подключены блок расчета результирующего модуля тока 15 (БРМ2), блок расчета невязки 8 (БРН), блок определения оценки момента нагрузки 16 (БОН), блок имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА).
В качестве датчиков статорных фазных токов 9 (ДТ1), 10 (ДТ2) использован промышленный прибор КЭИ-0,1. Тиристорный преобразователь напряжения 2 (ТПН), блок управления 3 (БУ), регулятор частоты вращения 4 (РЧ), блок задания частоты вращения 5 (ЗЧ) реализованы на базе электропривода фирмы Siemens с модулем обратной связи. Блок имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА), блок определения нагрузки 16 (БОН), блок расчета невязки 8 (БРН), блоки расчета результирующих модулей тока 7 (БРМ1), 15 (БРМ2) и блоки преобразования координат 13 (ПК1), 14 (ПК2) выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
С помощью датчиков статорных фазных токов 9 (ДТ1), 10 (ДТ2) измеряют значение токов асинхронного двигателя 1 (АД), которые затем преобразуют в двухфазную систему координат в блоке преобразования координат 14 (ПК2). Затем в блоке результирующего модуля тока 15 (БРМ2) вычисляют результирующий модуль тока IR:
где Iα, Iβ - токи электродвигателя в двухфазной системе координат.
Одновременно с этим напряжения, снятые датчиками напряжения 11 (ДН1), 12 (ДН2) с обмоток асинхронного двигателя 1 (АД), преобразуют в блоке преобразования координат 13 (ПК1) в двухфазную систему координат. На основе напряжений Uα, Uβ, полученных в блоке преобразований координат 13 (ПК1), вычисляют в блоке имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА) оценки токов 

где  - вспомогательный коэффициент;
- вспомогательный коэффициент;
RS, Rr - сопротивления статора и ротора;
LS, Lr - индуктивности статора и ротора;
Lm - индуктивность намагничивания;
J - момент инерции;
zp - количество пар полюсов;
USα, USβ - статорные напряжения электродвигателя в двухфазной системе координат;
 - оценки потокосцепления в двухфазной системе координат;
- оценки потокосцепления в двухфазной системе координат;
 - оценка момента двигателя.
- оценка момента двигателя.
На основе полученных оценок тока в блоке имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА) определяют с помощью блока результирующего модуля тока 7 (БРМ1) оценку результирующего модуля тока 

В блоке расчета невязки 8 (БРН) определяют невязку токов ΔI:

на основе которой рассчитывают в блоке определения оценки нагрузки 16 (БОН) оценку момента нагрузки 
где kH - пропорциональный коэффициент, настраиваемый экспертом вручную.
После этого цикл работы повторяют. С учетом расчета оценки момента нагрузки  в блоке имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА) формируют оценку частоты вращения
в блоке имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат 6 (БИМА) формируют оценку частоты вращения  :
:
В регуляторе частоты вращения 4 (РЧ) вычисляют отклонение текущей частоты вращения от заданного значения в блоке здания частоты вращения 5 (ЗЧ). На вход блока управления 3 (БУ) с выхода регулятора частоты вращения 4 (РЧ) поступает задание, на основании которого формируют управляющие сигналы для тиристорного преобразователя напряжения 2 (ТПН), который подключен к обмоткам двигателя 1 (АД). В итоге на валу асинхронного двигателя 1 (АД) обеспечивается заданная частота вращения как в динамике, так и в статике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2763849C1 |
Изобретение относится к области электротехники и может быть использовано для регулирования частоты вращения ротора асинхронных электроприводов с тиристорным преобразователем напряжения. Технический результат: обеспечение определения оценки частоты вращения асинхронного двигателя во всем диапазоне регулирования скорости с погрешностью не более 5%. Электропривод переменного тока содержит асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчик фазного статорного тока и датчик напряжения, подключенные к одной фазе асинхронного двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, а вход - с выходом блока регулятора частоты вращения, один вход которого соединен с задатчиком частоты вращения. Второй вход регулятора частоты вращения соединен с имитационной моделью асинхронного двигателя в двухфазной неподвижной системе координат, выход которого соединен с первым блоком расчета результирующего модуля тока, который подключен к блоку расчета невязки. Второй датчик статорного фазного тока и второй датчик напряжения подключены к другой фазе двигателя. К первому и второму датчикам напряжения подключен первый блок преобразования координат, выход которого соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат. Первый и второй датчики статорных фазных токов соединены со вторым блоком преобразования координат, к которому последовательно подключены второй блок расчета результирующего модуля тока, блок расчета невязки, блок определения оценки момента нагрузки, блок имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат. 1 ил.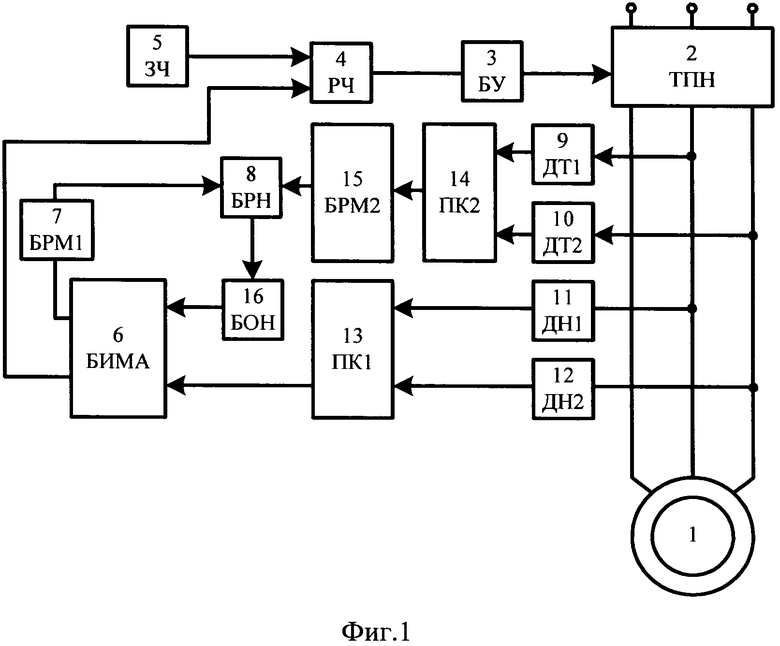
Электропривод переменного тока, содержащий асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчик фазного статорного тока и датчик напряжения, подключенные к одной фазе асинхронного двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, а вход - с выходом блока регулятора частоты вращения, один вход которого соединен с задатчиком частоты вращения, отличающийся тем, что второй вход регулятора частоты вращения соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат, выход которого соединен с первым блоком расчета результирующего модуля тока, который подключен к блоку расчета невязки, второй датчик статорного фазного тока и второй датчик напряжения подключены к другой фазе асинхронного двигателя, при этом к первому и второму датчику напряжения подключен первый блок преобразования координат, выход которого соединен с блоком имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат, а первый и второй датчик статорных фазных токов соединены со вторым блоком преобразования координат, к которому последовательно подключены второй блок расчета результирующего модуля тока, блок расчета невязки, блок определения оценки момента нагрузки, блок имитационной модели асинхронного двигателя в двухфазной неподвижной системе координат.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| Шихта для изготовления форстеритовых огнеупоров | 1983 |
|
SU1188145A1 |
| Способ устранения обширных дефектов твердого нёба | 2019 |
|
RU2733863C1 |
| Способ тепловой обработки необмолоченных зерновых продуктов | 1978 |
|
SU732640A1 |
| US 5008608 A, 16.04.1991 | |||
| Способ иммобилизации кислых протеиназ | 1976 |
|
SU621680A1 |
| CN 102882466 A, 16.01.2013. | |||

