Настоящее изобретение относится к способу измерения ускорений с использованием кориолисова гироскопа-датчика угловой скорости, а также к пригодному для этой цели кориолисову гироскопу.
Кориолисовы гироскопы (также называемые вибрационными гироскопами) находят все большее применение для навигационных целей; они содержат массосодержащую систему, которую вынуждают совершать колебательные движения. Обычно каждая массосодержащая система имеет большое число колебательных режимов, которые первоначально независимы друг от друга. При работе с кориолисовым гироскопом искусственно возбуждают особый колебательный режим массосодержащей системы, далее именуемый в тексте «возбуждающими колебаниями». Вращение кориолисова гироскопа обуславливает возникновение кориолисовых сил, которые извлекают энергию из возбуждающих колебаний массосодержащей системы и таким образом сообщают массосодержащей системе последующий колебательный режим, далее именуемый «считывающими колебаниями». Для измерения вращения кориолисова гироскопа осуществляют отвод считывающих колебаний и исследование соответствующего считывающего сигнала с тем, чтобы определить, произошли ли какие-либо изменения в амплитуде считывающих колебаний, которые представляют собой количественную характеристику вращения кориолисова гироскопа. Кориолисовы гироскопы могут быть выполнены как в виде открытой (разомкнутой) системы, так и в виде закрытой (или замкнутой) системы. В замкнутой системе амплитуду считывающих колебаний через соответствующие контуры управления непрерывно регулируют для установления на фиксированное значение - предпочтительно ноль - и измеряют возвращающие силы.
При этом массосодержащая система кориолисова гироскопа (далее также именуемая «резонатором») конструктивно может быть выполнена значительно отличающимися способами. Например, возможно использование цельной массосодержащей системы. В качестве варианта, возможно разделение массосодержащей системы на два осциллятора, которые связаны друг с другом системой пружин и могут выполнять взаимные перемещения относительно друг друга. При использовании систем со сдвоенными линейными осцилляторами, которые содержат связанную систему, составленную из двух линейных осцилляторов, можно достичь высоких размерных точностей. В системах со сдвоенными осцилляторами пружинная система, которая связывает оба линейных осциллятора друг с другом, обычно имеет такое конструктивное исполнение, которое позволяет обоим линейным осцилляторам совершать вынужденные колебания вдоль первой оси колебаний, и в этом случае вторичный осциллятор может дополнительно совершать колебания вдоль второй оси колебаний, которая размещена под прямыми углами к первой оси колебаний. В этом случае перемещения вторичного осциллятора вдоль второй оси колебаний можно рассматривать в качестве считывающих колебаний, а перемещения первичного и вторичного осцилляторов вдоль первой оси колебаний можно рассматривать в качестве возбуждающих колебаний.
Недостаток систем со сдвоенными линейными осцилляторами состоит в том, что колебательные движения обоих линейных осцилляторов вдоль первой оси колебаний могут вызвать вибрации и отражения в корпусе гироскопа. В данном случае под «корпусом гироскопа» следует понимать механическую не совершающую колебания структуру, в которую «встроены» осцилляторы, например не совершающую колебания часть кремниевой пластины. Вибрации или отражения в корпусе гироскопа могут в свою очередь привести к помехам (например, эффекты затухания), колебательным движениям. Так, например, на колебания первичного и вторичного линейных осцилляторов вдоль первой оси колебаний могут быть наложены помехи от внешних вибраций и ускорений, которые действуют вдоль первой оси колебаний. Аналогично этому, внешние вибрации и ускорения, которые действуют в направлении второй оси колебаний, могут вызвать помехи в колебаниях вторичного осциллятора вдоль этой оси колебаний, что - точно таким же образом как для всех других влияний упомянутых помех - приводит к искажению измеренной угловой скорости.
Основная задача изобретения состоит в создании кориолисова гироскопа, с помощью которого можно в значительной степени избежать любых помех считывающих колебаний, то есть колебаний вторичного линейного осциллятора в направлении второй оси колебаний, как результата влияний упомянутых выше помех.
Для решения этой задачи согласно изобретению предложен кориолисов гироскоп по п.1 формулы изобретения. Кроме того, согласно изобретению предложен способ измерения ускорений/угловых скоростей с использованием кориолисова гироскопа-датчика угловой скорости по п.7 формулы изобретения. Признаки, характеризующие дальнейшие варианты усовершенствования и развития идеи изобретения, определены в соответствующих зависимых пунктах формулы изобретения.
Кориолисов гироскоп в соответствии с изобретением включает первичный и вторичный резонаторы, каждый из которых выполнен в виде связанной системы, содержащей первичный и вторичный линейные осцилляторы, при этом первичный резонатор механически/электростатически соединен/связан со вторичным резонатором так, что оба резонатора совершают колебательные движения в противофазе по отношению друг к другу вдоль общей оси колебаний.
Соответственно кориолисов гироскоп в соответствии с изобретением включает массосодержащую систему, которая содержит две системы со сдвоенными осцилляторами (то есть два резонатора) или четыре линейных осциллятора. В данном случае, совершаемые в противофазе по отношению друг к другу колебательные движения обоих резонаторов приводят к тому, что центр тяжести массосодержащей системы остается неизменным при условии, что оба резонатора имеют соответствующее конструктивное исполнение. Это приводит к тому, что колебания массосодержащей системы не могут вызвать какую-либо внешнюю вибрацию, которая в свою очередь могла бы привести к возникновению помех в виде затухания/отражений. Кроме того, внешние вибрации и ускорения в направлении общей оси колебаний не оказывают никакого влияния на противофазное перемещение обоих резонаторов вдоль общей оси колебаний.
В качестве примера, первичный резонатор может быть связан со вторичным резонатором через систему пружин, которая соединяет первичный резонатор со вторичным резонатором. Кроме того, первичный резонатор можно соединить со вторичным резонатором с помощью электростатического поля. Оба типа соединения можно применять вместе или по отдельности. Достаточно сформировать оба резонатора в общей подложке, так чтобы механическая связь была заменена механическим соединением, образуемым самой общей подложкой.
Предпочтительно конфигурации первичного и вторичного резонаторов должны быть идентичными по массе и форме. В таком случае, оба резонатора можно разместить осесимметрично по отношению друг к другу и по отношению к оси симметрии, которая расположена под прямыми углами к общей оси колебаний, то есть первичный резонатор отображен по оси симметрии на вторичный резонатор. Однако изобретение этим не ограничено, и достаточно, если оба резонатора имеют одинаковую массу, но конструктивно выолнены в разной форме.
Как уже упомянуто, связанные резонаторы конструктивно выполняют так, чтобы оба линейных осциллятора одного резонатора были способны к совершению вынужденных колебаний в противофазе вдоль первой оси колебаний (возбуждающие колебания), а вторичный линейный осциллятор был способен к совершению вынужденных колебаний вдоль второй оси колебаний (считывающие колебания). Если первая и вторая оси колебаний расположены под прямыми углами друг к другу, и оба резонатора совершают вынужденные колебания в противофазе по отношению друг к другу вдоль первой оси колебаний (общая ось колебаний), то во время вращения кориолисова гироскопа вторичные осцилляторы отклоняются в противоположном направлении (противофазное отклонение), в то время, как, в отличие от этого, при ускорении кориолисова гироскопа вторичные линейные осцилляторы отклоняются в одном направлении (синфазное отклонение). Таким образом, можно произвести выборочное измерение ускорений или вращений. Ускорение измеряют путем обработки синфазных колебаний, а угловую скорость измеряют путем обработки противофазных колебаний. В следующем тексте выражения «синфазный" и «противофазный» имеют следующие значения: если координаты в направлении возбуждения обозначить х, а координаты в направлении считывания обозначить y, то x1=x2, y1=y2 для синфазных колебаний и x1=-x2, y1=-y2 для противофазных колебаний (в данном случае, индекс «1» означает первичный осциллятор, а индекс «2» вторичный осциллятор).
На основании этого, согласно изобретению предложен способ выборочного или одновременного измерения угловых скоростей и ускорений. Этот способ использует кориолисов гироскоп-датчик угловой скорости, который содержит первичный и вторичный резонаторы, каждый из которых выполнен в виде связанной системы, содержащей первичный и вторичный линейные осцилляторы, и в котором подлежащие измерению угловые скорости измеряют путем отвода и обработки отклонений вторичных осцилляторов. Способ включает следующие этапы:
- оба резонатора вынуждают совершать колебательные движения в противофазе друг с другом вдоль общей оси колебаний,
- отклонения вторичных осцилляторов сравнивают друг с другом с целью определения составляющей противофазного отклонения, которая представляет собой количественную характеристику подлежащей измерению угловой скорости, и/или с целью определения составляющей общего синфазного отклонения, которая представляет собой количественную характеристику подлежащего измерению ускорения, и
- рассчитывают подлежащие измерению угловую скорость/ускорения исходя из составляющей синфазного отклонения/составляющей противофазного отклонения.
Предпочтительно составляющую общего синфазного отклонения определяют следующим образом: определяют первичное поперечное смещение, которое возникает внутри первичного резонатора, и вторичное поперечное смещение, которое возникает внутри вторичного резонатора. Затем первичное и вторичное поперечные смещения складывают и вычитают с целью определения составляющей общего поперечного смещения (синфазная составляющая) и составляющей разности поперечных смещений (противофазная составляющая). Составляющая общего поперечного смещения пропорциональна подлежащему измерению ускорению и соответствует составляющей общего синфазного отклонения. Составляющая разности поперечных смещений (разность) соответствует составляющей противофазного отклонения. В результате угловую скорость можно измерить одновременно с ускорением с помощью составляющей разности поперечных смещений.
Для того чтобы облегчить понимание описанного выше принципа измерения ускорения, далее в описании будут еще раз кратко пояснены физические принципы работы кориолисова гироскопа со ссылкой на пример использования системы со сдвоенными линейными осцилляторами.
В общем случае, кориолисов гироскоп имеет поперечное смещение, то есть сдвиг нуля. При этом поперечное смещение состоит из множества составляющих поперечного смещения. Одна из таких составляющих поперечного смещения возникает в результате погрешностей ориентации первичного и вторичного линейных осцилляторов по отношению друг к другу, при этом вследствие производственных допусков на изготовление такие погрешности ориентации неизбежны. Погрешности ориентации обоих осцилляторов вызывают сдвиг нуля в измеряемом сигнале угловой скорости.
Кориолисова сила может быть представлена как:

 - кориолисова сила;
- кориолисова сила;
m - масса осциллятора;
 - скорость осциллятора;
- скорость осциллятора;
 - угловая скорость.
- угловая скорость.
Если реагирующая на кориолисову силу масса равна массе, совершающей колебательные движения, и если осциллятор совершает колебания с собственной частотой ω, то:

Скорость осциллятора составляет:

где
 - амплитуда осциллятора
- амплитуда осциллятора
ω - частота собственных колебаний осциллятора.
Следовательно, ускорение осциллятора и кориолисово ускорение составляют:
Таким образом, вектора обоих ускорений пространственно размещены под прямыми углами друг к другу и сдвинуты на 90° по отношению друг к другу во времени (пространственная и временная ортогональность).
Оба эти критерия можно использовать для разделения ускорения осциллятора  и кориолисова ускорения
и кориолисова ускорения  . Отношение амплитуд вышеупомянутых ускорений ас и as составляет:
. Отношение амплитуд вышеупомянутых ускорений ас и as составляет:
Если угловая скорость  =5°/ч, а частота собственных колебаний осциллятора fs=10 кГц, то:
=5°/ч, а частота собственных колебаний осциллятора fs=10 кГц, то:
Для точности 5°/ч нежелательные коэффициенты связи первичного осциллятора со вторичным осциллятором не должны превышать 7,7·10-10 или должны быть постоянно равны этому значению. Если используют массосодержащую систему, составленную из двух линейных осцилляторов, которые соединены друг с другом пружинными элементами, то точность пространственной ортогональности ограничена вследствие погрешности ориентации пружинных элементов, возникающей в интервале между колебательным режимом и режимом измерения. Реально достижимая точность (ограниченная производственными допусками на изготовление) составляет от 10-3 до 10-4. Точность временной ортогональности ограничена фазовой точностью электронного блока на частоте, к примеру, 10 кГц, которая также не может превышать значения от 10-3 до 10-4. Это означает, что отношение определенных выше ускорений не может быть удовлетворительным.
В действительности, результирующая погрешность отношения измеренных ускорений ac/as составляет:
Пространственная погрешность обуславливает возникновение так называемого поперечного смещения BQ, которое вместе с фазово-временной погрешностью Δϕ обуславливает возникновение смещения В:
Таким образом, поперечное смещение накладывает основное ограничение на точность измерения. Следует заметить, что в данном случае приведенный выше анализ погрешностей учитывает только прямую связь между колебательным и считывающим режимами. Кроме того, существуют дополнительные составляющие поперечного смещения, которые возникают, например, в результате связей с другими колебательными режимами.
Если кориолисов гироскоп конструктивно выполнен так, что первичные осцилляторы связаны посредством первичных пружинных элементов с корпусом кориолисова гироскопа, а вторичные осцилляторы связаны посредством вторичных пружинных элементов с каждым из первичных осцилляторов, то подлежащее измерению ускорение обусловливает изменение взаимной ориентации первичных осцилляторов по отношению ко вторичным осцилляторам, что проявляется, в частности, в изменении ориентации вторичных пружинных элементов. При этом изменение ориентации вторичных пружинных элементов генерирует составляющую «искусственного» поперечного смещения, то есть «погрешность» сигнала поперечного смещения. Таким образом, можно косвенно использовать определение поперечного смещения с тем, чтобы вывести величину измеряемого ускорения, которое генерирует соответствующую составляющую «искусственного» поперечного смещения.
Предпочтительно первичные и вторичные пружинные элементы расположены под прямым углом друг к другу. Пружинные элементы могут иметь любую необходимую форму.
Выражения «первичное поперечное смещение» и «вторичное поперечное смещение» в каждом случае предпочтительно означают общее поперечное смещение резонатора. Однако также возможно в способе измерения ускорения в соответствии с изобретением в каждом случае определить только составляющую поперечного смещения для каждого резонатора, и в каждом случае определенная составляющая поперечного смещения должна содержать по крайней мере ту составляющую, которая была сгенерирована подлежащим измерению ускорением и подлежащим измерению вращением.
Кориолисов гироскоп предпочтительно снабжен устройством для измерения сигналов первичной угловой скорости и поперечного смещения, которые имеют место в первичном резонаторе, и сигналов вторичной угловой скорости и поперечного смещения, которые имеют место во вторичном резонаторе. Кроме того, кориолисов гироскоп может иметь устройство генерирования электростатических полей, посредством которых можно изменять угол ориентации первичных пружинных элементов относительно корпуса гироскопа и/или изменять угол ориентации вторичных пружинных элементов относительно первичных осцилляторов. Затем ориентацию/напряженность электростатических полей можно регулировать соответствующими контурами управления, так чтобы первичное и вторичное поперечные смещения в каждом случае были минимально возможными. Вычислительный блок может использовать сигналы первичной и вторичной угловых скоростей/поперечных смещений для определения угловой скорости и может использовать синфазную составляющую электростатических полей, которые компенсируют первичное и вторичное поперечные смещения, для уменьшения подлежащего измерению ускорения.
Таким образом, поперечное смещение самоликвидируется в момент возникновения, то есть погрешности механической ориентации обоих осцилляторов по отношению друг к другу и изменения взаимной ориентации обоих осцилляторов, обусловленные измеряемым ускорением/вращением, компенсируются сгенерированной электромагнитным полем электростатической силой, которая действует на один или оба осциллятора. Такая разновидность компенсирования поперечного смещения имеет то преимущество, что и угловые скорости, и ускорения могут быть определены с повышенной точностью измерения.
В наиболее предпочтительном варианте изобретения посредством электрических полей изменяют углы ориентации первичных и вторичных пружинных элементов для того, чтобы выставить первичные и вторичные пружинные элементы ортогонально по отношению друг к другу. Такая ортогонализация приводит к компенсированию (составляющей) поперечного смещения, полученного таким способом. Используют также дополнительные составляющие для установки ошибочного угла по отношению к ортогональности таким образом, чтобы суммарное поперечное смещение было равно нулю. Углы ориентации вторичных пружинных элементов по отношению к первичному осциллятору предпочтительно изменяют посредством электростатического поля, а углы ориентации первичных пружинных элементов по отношению к корпусу кориолисова гироскопа оставляют неизменными. Однако возможно также применение электростатического поля для изменения только углов ориентации первичных пружинных элементов или для изменения углов ориентации обоих первичных и вторичных пружинных элементов.
Согласно одному из предпочтительных вариантов кориолисов гироскоп в соответствии с изобретением содержит:
- («суммарный») резонатор, выполненный в виде системы, содержащей два связанных первичных (линейных) осциллятора («суб-резонатора»), которые возбуждены в противофазе и каждый из которых содержит вторичный линейный считывающий осциллятор,
- устройство для генерирования по меньшей мере одного электростатического поля, с помощью которого можно изменить ориентацию обоих связанных первичных осцилляторов по отношению к вторичным считывающим осцилляторам,
- устройство для измерения поперечных смещений считывающих осцилляторов, вызванных погрешностями ориентации обоих осцилляторов по отношению к возбуждающему осциллятору и дополнительным соединительным механизмам,
- контур управления, который в каждом случае стабилизирует интенсивность по меньшей мере одного электростатического поля посредством по меньшеей мере одного соответствующего сигнала управления таким образом, что измеренные поперечные смещения являются минимально возможными,
- вычислительный блок, который в каждом случае формирует разности и суммы по меньшей мере одного сигнала управления и использует их для определения угловой скорости и ускорения.
В общем случае, ускорения и угловые скорости можно рассчитать исходя только из измеренных поперечных смещений, то есть нет абсолютной необходимости в компенсировании первичного и вторичного поперечного смещения для измерения поперечных смещений. Однако это целесообразно выполнить по соображениям точности измерения, так как допуски на отклонение фазы приводят к смешиванию друг с другом угловой скорости и сдвига по фазе на 90°. Изобретение охватывает оба варианта.
Также было обнаружено, что предпочтительно если вторичный осциллятор прикреплен или зафиксирован в резонаторах на первичном осцилляторе «с одного конца». В данном случае выражение «зафиксированный с одного конца» следует понимать не только в его буквальном значении, но и в общем смысле. Вообще, присоединенный или зафиксированный «с одного конца» означает, что первичный осциллятор передает усилие на вторичный осциллятор главным образом с одной «стороны» первичного осциллятора. Если, например, колебательная система была бы спроектирована так, что вторичный осциллятор граничил с первичным осциллятором и был соединен с ним вторичными пружинными элементами, то выражение «зафиксирован или присоединен с одного конца» означало бы следующее: вторичный осциллятор подстроен для осуществления перемещения первичного осциллятора, при этом первичный осциллятор попеременно «толкает» или «тянет» вторичный осциллятор посредством вторичных пружинных элементов.
Преимущество закрепления вторичного осциллятора с одного конца первичного осциллятора заключается в том, что, когда возникает электростатическая сила, действующая на вторичный осциллятор, в результате изменения ориентации/положения вторичного осциллятора, которое этим обусловлено, вторичные пружинные элементы могут быть слегка искривлены, что позволяет таким образом беспрепятственно изменить соответствующий угол ориентации вторичных пружинных элементов. Если бы в данном примере вторичный осциллятор был соединен с дополнительными вторичными пружинными элементам таким образом, чтобы при перемещении первичного осциллятора вторичные пружинные элементы одновременно «тянули» и «толкали» вторичный осциллятор, то это было бы эквивалентно фиксированию или присоединению вторичного осциллятора к первичному «с обоих концов» (при этом к вторичному осциллятору приложена сила, действующая с обоих противоположных концов первичного осциллятора). В данном случае, при воздействии электростатического поля дополнительные вторичные пружинные элементы вызывали бы появление соответствующих противоположных сил, так что изменение углов ориентации вторичных пружинных элементов было бы затруднено. Однако фиксирование с обоих концов допустимо, если дополнительные вторичные пружинные элементы конструктивно выполнены таким образом, что их влияние невелико, так что при этом все пружинные элементы могут быть также беспрепятственно согнуты, то есть фиксирование с одного конца является эффективным. В зависимости от конструктивного исполнения структуры осциллятора эффективное фиксирование с одного конца можно осуществить только «влиянием» (приложением силы) дополнительных вторичных пружинных элементов величиной 40% или меньше. Однако этот показатель не налагает какого-либо ограничения на изобретение, и допустимо также, чтобы влияние вторичных пружинных элементов превышало 40%. В качестве примера, фиксирование с одного конца может быть осуществлено всеми вторичными пружинными элементами, которые соединяют вторичный осциллятор с первичным осциллятором, расположенными параллельно и в одной плоскости друг с другом. Все начальные и конечные точки вторичных пружинных элементов соединены в каждом случае с такими же окончаниями первичного и вторичного осцилляторов. При этом каждую из начальных и конечных точек вторичных пружинных элементов можно эффективно расположить на общей оси с осями, пересекающими вторичные пружинные элементы под прямыми углами.
Если вторичный осциллятор присоединен или зафиксирован на первичном осцилляторе с одного конца, то первичные пружинные элементы предпочтительно конструктивно выполнить так, чтобы они фиксировали первичный осциллятор на корпусе гироскопа с обоих концов (выражения «с одного конца и «с обоих концов» здесь можно использовать аналогично). Однако в качестве варианта первичные пружинные элементы также можно выполнить конструктивно так, чтобы они были зафиксированы на первом осцилляторе с одного конца. В качестве примера, все первичные пружинные элементы, которые соединяют первичный осциллятор с корпусом кориолисова гироскопа, можно расположить параллельно и в одной плоскости друг с другом с размещенными в каждом случае начальными и конечными точками первичных пружинных элементов предпочтительно на общей оси. Равновозможно пружинные элементы выполнить конструктивно так, чтобы первичный осциллятор был зафиксирован на корпусе гироскопа с одного конца, а вторичный осциллятор был зафиксирован с двух концов первичным осциллятором. Также возможно, чтобы оба осциллятора были зафиксированы с двух концов. Было обнаружено, что для эффективного компенсирования поперечного смещения по меньшей мере один или два осциллятора следует закрепить с одного конца.
Данное изобретение будет подробнее пояснено в нижеследующем описании с использованием примера осуществления и со ссылками на сопроводительные чертежи, из которых:
фиг.1 показывает возможный вариант массосодержащей системы, которая содержит два линейных осциллятора с соответствующими контурами управления, используемыми для возбуждения первичного осциллятора;
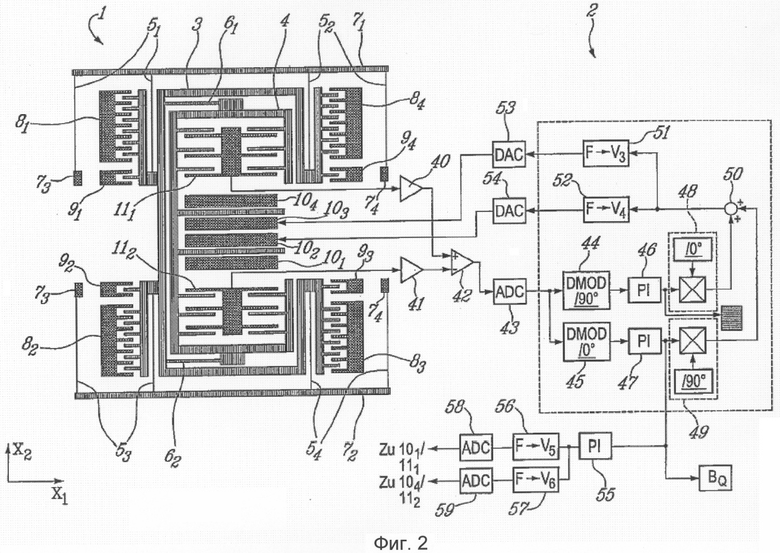
фиг.2 показывает возможный вариант массосодержащей системы, которая содержит два линейных осциллятора с соответствующими контурами измерения и управления скоростью поворота Ω и поперечным смещением BQ, а также вспомогательные контуры управления для компенсирования поперечного смещения BQ;
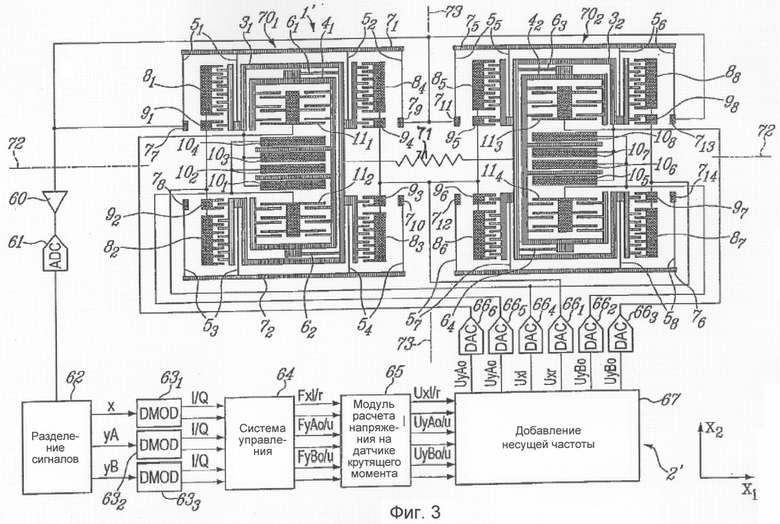
фиг.3 показывает эскизный чертеж массосодержащей системы в соответствии с изобретением, которая содержит четыре линейных осциллятора с соответствующими контурами измерения и управления угловой скоростью Ω и поперечным смещением BQ, a также вспомогательные контуры управления компенсированием поперечного смещения BQ;
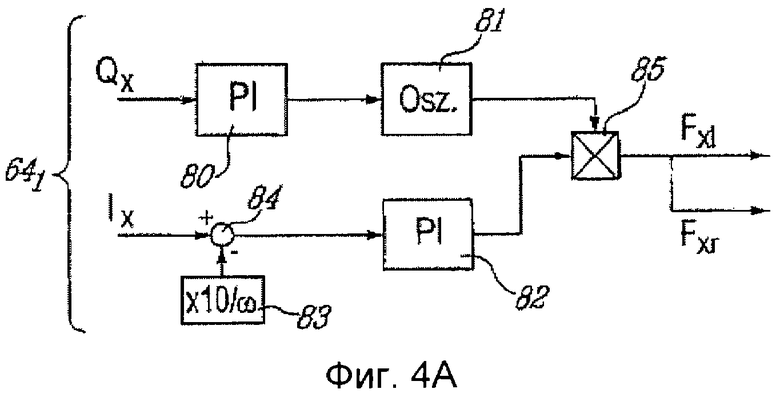
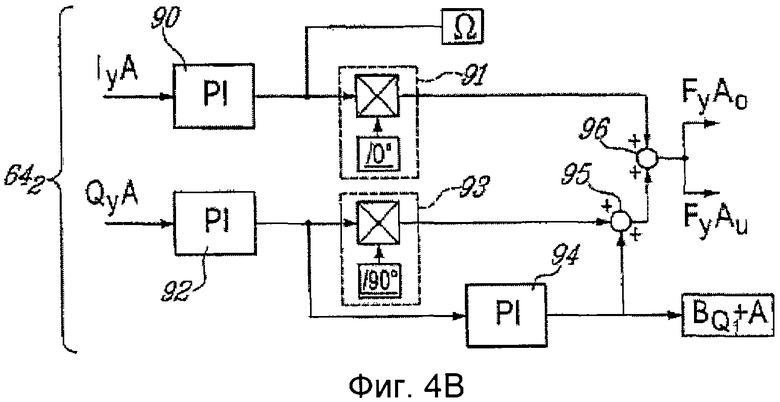
фиг.4 показывает предпочтительный вариант системы управления, показанной на фиг.3.
На фиг.1 показан схематический эскиз сдвоенного линейного осциллятора 1 с соответствующими электродами, а также технологическая схема соответствующего электронного блока 2 для осуществления оценки/возбуждения. Сдвоенный линейный осциллятор 1 изготавливают предпочтительно травлением кремниевой пластины, он содержит первичный линейный осциллятор 3, вторичный линейный осциллятор 4, первичные пружинные элементы 51-54, вторичные пружинные элементы 61, 62, а также части 71 и 72 промежуточного корпуса и части 73 и 74 корпуса гироскопа. Вторичный осциллятор 4 устанавливают внутри первичного осциллятора 3 таким образом, чтобы он мог совершать колебательные движения и был соединен с ним вторичными пружинными элементами 61, 62. Первичный осциллятор 3 соединен с корпусом 73, 74 гироскопа посредством первичных пружинных элементов 51-54 и промежуточного корпуса 71, 72.
Кроме того, имеются электроды 81-84 первичного возбуждения, электроды 91-94 первичного считывания, электроды 101-104 вторичного возбуждения и электроды 111 и 112 вторичного считывания. Все электроды механически соединены с корпусом гироскопа, но электрически изолированы. Выражение «корпус гироскопа» означает механическую не совершающую колебания структуру, в которую «встроены» осцилляторы, например не совершающую колебания часть кремниевой пластины.
Если первичный осциллятор 3 возбуждают посредством электродов 81-84 первичного возбуждения с целью принудить его совершать колебательные движения в направлении Х1, то это движение будет передано через вторичные пружинные элементы 61, 62 на вторичный осциллятор 4 (попеременно «натяжение» и «толчок»). Вертикальная ориентация первичных пружинных элементов 51-54 предотвращает перемещение первичного осциллятора 3 в направлении Х2. Однако вторичный осциллятор 4 может совершать вертикальные колебательные движения в результате горизонтальной ориентации вторичных пружинных элементов 61, 62. При возникновении соответствующих кориолисовых сил вторичный осциллятор 4 приходит в возбужденное состояние и совершает колебательные движения в направлении Х2.
Считывающий сигнал, который принимают от электродов 91-94 первичного считывания и который пропорционален амплитуде/частоте перемещения первичного осциллятора 3 в направлении Х1, подают через соответствующие усилительные элементы 21, 22 и 23 на аналого-цифровой преобразователь 24. Выходной сигнал, преобразованный соответствующим образом в цифровую форму и поступающий с аналого-цифрового преобразователя 24, подвергают демодуляции не только первичным демодулятором 25, но также и вторичным демодулятором 26 с целью формирования соответствующих выходных сигналов, оба демодулятора работают со сдвигом 90° по отношению друг к другу. Выходной сигнал от первичного демодулятора 25 подают на первичный стабилизатор 27 с целью регулирования частоты возбуждающих колебаний (колебательных движений массосодержащей системы 1 в направлении Х1), выходной сигнал которого управляет частотным генератором 30 так, чтобы идущий после демодулятора 25 сигнал был стабилизирован на нуле. Аналогично этому, выходной сигнал от вторичного демодулятора 26 стабилизирован на постоянное значение, которое заранее установлено компонентом электронного блока 29. Вторичный стабилизатор 31 обеспечивает стабилизацию амплитуды возбуждающих колебаний. Посредством умножителя 32 выполняют умножение друг на друга выходных сигналов, поступающих от частотного генератора 30 и амплитудного стабилизатора 31. Поступающий от умножителя 32 выходной сигнал, который пропорционален силе, прилагаемой к электродам первичного возбуждения 81-84, воздействует не только на первичный преобразователь сила/напряжение 33, но также на вторичный преобразователь сила/напряжение 34, которые используют цифровой сигнал силы для получения цифровых сигналов напряжения. Цифровые выходные сигналы с преобразователей сила/напряжение 33, 34 с помощью первичного и вторичного цифроаналоговых преобразователей 35, 36 преобразуют в соответствующие аналоговые сигналы напряжения, которые затем поступают на электроды 81-84 первичного возбуждения. Первичный стабилизатор 27 и вторичный стабилизатор 31 подстраивают частоту собственных колебаний первичного осциллятора 3 и устанавливают амплитуду возбуждающих колебаний на заранее точно определенное значение.
Перемещение вторичного осциллятора 4 в направлении Х2 (считывающие колебания), вызванное возникновением кориолисовых сил, обнаруживают электродами 111, 112 вторичного считывания и считывающий сигнал, который пропорционален величине перемещений считывающих колебаний, через соответствующие усилительные элементы 40, 41 и 42 подают на аналого-цифровой преобразователь 43 (см. фиг.2). Демодуляцию цифрового выходного сигнала с аналого-цифрового преобразователя 43 осуществляют третьим демодулятором 44 в фазе с сигналом прямого смещения, а четвертым демодулятором 45 осуществляют демодуляцию со сдвигом в 90°. Соответствующий выходной сигнал с первого демодулятора 44 подают на третий стабилизатор 46, выходной сигнал которого представляет собой компенсирующий сигнал и соответствует подлежащей измерению угловой скорости  . Выходной сигнал с четвертого демодулятора 45 подают на четвертый стабилизатор 47, выходной сигнал которого представляет собой компенсирующий сигнал и пропорционален подлежащему компенсированию поперечному смещению. Выходной сигнал с третьего стабилизатора модулируют первичным модулятором 48, а выходной сигнал с четвертого стабилизатора 47 модулируют аналогичным образом с помощью вторичного модулятора 49, так что происходит образование регулируемых по амплитуде сигналов, частоты которых соответствуют собственной частоте колебательных движений в направлении Х1 (sin
. Выходной сигнал с четвертого демодулятора 45 подают на четвертый стабилизатор 47, выходной сигнал которого представляет собой компенсирующий сигнал и пропорционален подлежащему компенсированию поперечному смещению. Выходной сигнал с третьего стабилизатора модулируют первичным модулятором 48, а выходной сигнал с четвертого стабилизатора 47 модулируют аналогичным образом с помощью вторичного модулятора 49, так что происходит образование регулируемых по амплитуде сигналов, частоты которых соответствуют собственной частоте колебательных движений в направлении Х1 (sin 0°, cos
0°, cos 90°). Соответствующие выходные сигналы с модуляторов 48, 49 суммируют в суммирующем каскаде 50, выходной сигнал которого подают как на третий преобразователь сила/напряжение 51, так и на четвертый преобразователь сила/напряжение 52. Соответствующие выходные сигналы преобразователей сила/напряжение 51, 52 подают на цифроаналоговые преобразователи 53, 54, аналоговые выходные сигналы которых подводят к электродам 102 и 103 вторичного возбуждения, при этом амплитуды колебаний вторичного осциллятора 4 приходят в исходное положение.
90°). Соответствующие выходные сигналы с модуляторов 48, 49 суммируют в суммирующем каскаде 50, выходной сигнал которого подают как на третий преобразователь сила/напряжение 51, так и на четвертый преобразователь сила/напряжение 52. Соответствующие выходные сигналы преобразователей сила/напряжение 51, 52 подают на цифроаналоговые преобразователи 53, 54, аналоговые выходные сигналы которых подводят к электродам 102 и 103 вторичного возбуждения, при этом амплитуды колебаний вторичного осциллятора 4 приходят в исходное положение.
Электростатическое поле, которое сгенерировано электродами 101 и 104 вторичного возбуждения (или два электростатических поля, которые сгенерированы парами электродов 101, 103 и 102, 104), вызывает изменение ориентации/положения вторичного осциллятора 4 в направлении Х2 и тем самым приводит к изменению ориентации вторичных пружинных элементов 61, 62. Четвертый стабилизатор 47 стабилизирует сигнал, который подводят к электродам 101 и 104 вторичного возбуждения, таким образом, что поперечное смещение, которое включено в сигнал компенсирования четвертого стабилизатора 47, является минимально возможным или отсутствует. Для этой цели используют пятый стабилизатор 55, пятый и шестой преобразователи сила/напряжение 56, 57 и два аналого-цифровых преобразователя 58, 59.
Выходной сигнал с четвертого стабилизатора 47, который представляет собой количественную характеристику поперечного смещения, подают на пятый стабилизатор 55, который стабилизирует электростатическое поле, сгенерированное двумя электродами 101 и 104 возбуждения таким образом, что поперечное смещение BQ исчезает. Для этой цели выходной сигнал с пятого стабилизатора 55 в каждом случае подают на пятый и шестой преобразователи сила/напряжение 56, 57, которые используют цифровой выходной сигнал силы с пятого стабилизатора для генерирования цифровых сигналов напряжения. Затем последние в аналого-цифровых преобразователях 58, 59 преобразовывают в аналоговые сигналы напряжения. Аналоговый выходной сигнал с аналого-цифрового преобразователя 58 подают на электрод 101 или, как вариант, 111 вторичного возбуждения. Аналоговый выходной сигнал с аналого-цифрового преобразователя 59 подают на электрод 104 или, как вариант, 112 вторичного возбуждения.
Так как вторичный осциллятор 4 фиксируют только вторичными пружинными элементами 61, 62 (фиксирование с одного конца), то с помощью электростатического поля можно беспрепятственно произвести изменение ориентации указанных пружинных элементов. Также можно предусмотреть дополнительные вторичные пружинные элементы, которые обуславливают фиксирование вторичного осциллятора 4 с обоих концов, при условии, что эти дополнительные пружинные элементы имеют соответствующее конструктивное исполнение, обеспечивающее эффективное фиксирование с одного конца. Для достижения такого же эффекта для пружинных элементов 51, 52, а также пружинных элементов 53, 54 можно исключить третий и четвертый пружинные элементы 53, 54 и первичные и вторичные пружинные элементы 51, 52, что приводит к фиксированию первичного осциллятора 3 с одного конца (наряду с соответствующим образом модифицированной конфигурацией электродов, которая здесь не показана). В такой ситуации, для осуществления фиксирования с обоих концов вторичный осциллятор 4 может быть присоединен к первичному осциллятору с помощью добавочных пружинных элементов.
Возможный вариант кориолисова гироскопа в соответствии с изобретением и способ его эксплуатирования будут подробнее описаны далее со ссылкой на фиг.3.
На фиг.3 показано схематическое изображение связанной системы 1', содержащей первичный резонатор 701 и вторичный резонатор 702. Первичный резонатор 701 соединен с вторичным резонатором 702 элементом механической связи 71, в частности пружиной. Первичный и вторичный резонаторы 701, 702 формируют в общей подложке, их можно принудить совершать колебательные движения в противофазе по отношению друг к другу вдоль общей оси 72 колебаний. Первичный и вторичный резонаторы 701, 702 идентичны, их отображают друг на друга по оси 73 симметрии. Объяснение конструктивного исполнения первичного и вторичного резонаторов 701, 702 уже было приведено в связи с фиг.1 и 2 и поэтому не будет повторено; идентичные и взаимосоответствующие компоненты или группы компонентов обозначены одинаковыми позиционными номерами для идентичных компонентов, которые соотнесены с разными резонаторами, обозначенными разными индексами.
Основное отличие между сдвоенными осцилляторами, показанными на фиг.3, и сдвоенными осцилляторами, показанными на фиг.1 и 2, состоит в том, что некоторые отдельные электроды физически объединены с целью формирования одного сплошного электрода. Так, например, отдельные электроды, которые идентифицированы на фиг.3 позиционными номерами 81, 82, 91 и 92, образуют общий электрод. Кроме того, отдельные электроды, которые идентифицированы позиционными номерами 83, 84, 93 и 94, образуют общий электрод, и отдельные электроды с позиционными номерами 104, 102, 112, а также 111, 103 и 101 каждый образуют сплошной электрод. Аналогичным образом то же самое применяют к другой системе с сдвоенными осцилляторами.
При работе связанной системы 1' в соответствии с изобретением два резонатора 701, 702 совершают колебательные движения в противофазе вдоль общей оси 72 колебаний. В результате этого связанная система 1' не подвержена воздействию внешних помех или помех, которые вызывает сама связанна система 1' в подложке, в которую устанавливают резонаторы 701 и 702.
При вращении связанной системы 1' вторичные осцилляторы 41 и 42 отклоняют во взаимопротивоположных направлениях (в направлении Х2 и в направлении, противоположном Х2). При возникновении ускорения связанной системы 1' каждый из вторичных осцилляторов 41, 42 отклоняют в том же направлении, в частности в направлении ускорения при условии, что это ускорение имеет направление Х2 или противоположное ему. В результате этого можно произвести измерение ускорений и вращений одновременно или по выбору. Компенсирование поперечного смещения может быть выполнено в резонаторах 701, 702 одновременно с процессом измерения. Однако в этом нет абсолютной необходимости.
В принципе, возможно эксплуатирование связанной системы 1' на основе электронного блока 2 для измерения/возбуждения, описанного при рассмотрении фиг.1 и 2. Однако для показанного на фиг.3 варианта вместо этого используют альтернативный способ (способ несущей частоты). Указанный способ работы будет описан в следующем тексте.
Электронный блок 2 для измерения/возбуждения, который обозначен позицией 2', содержит три контура управления: первый контур управления для возбуждения и/или управления противофазными колебаниями первичных осцилляторов 31 и 32 вдоль общей оси 72 колебаний, второй контур управления для приведения в исходное состояние и компенсирования колебаний вторичного осциллятора по направлению Х2 и контур управления для приведения в исходное состояние и компенсирования колебаний вторичного осциллятора 42 по направлению Х2. Три описанных контура управления содержат усилитель 60, аналого-цифровой преобразователь 61, модуль 62 разделения сигналов, первый, второй и третий модули 631, 632, 633 демодуляции, модуль 64 управления, модуль 65 расчета напряжения на датчике крутящего момента, модуль 67 добавления несущей частоты и с первого по шестой цифро-аналоговые преобразователи 661-666.
Несущие частоты могут быть поданы на электроды 81-88, 91-98, 101-108 и 111-114 для отводящего возбуждения противофазных колебаний или колебаний вторичных осцилляторов 41, 42 целым рядом способов: а) использованием трех различных частот с одной частотой, связанной с каждым из контуров управления, б) использованием способа мультиплексирования с временным разделением сигналов прямоугольной формы или в) использованием скремблирования с беспорядочной фазой (способ стохастической модуляции). Несущие частоты подают на электроды 81-88, 91-98, 101-108 и 111-114 с помощью соотнесенных сигналов UyAo, UyAu (для вторичного осциллятора 41) и Uxl, Uxr (для противофазного резонанса первичных осцилляторов 31, 32), а также UyBu и UyBo (для вторичного осциллятора 42), которые генерируют в модуле 67 добавления несущей частоты и осуществляют их возбуждение в противофазе относительно вышеупомянутых частотных сигналов. Колебательные движения первичных и вторичных осцилляторов 31, 32, 41 и 42 отводят теми частями корпуса гироскопа, которые обозначены позиционными номерами 77, 79, 711 и 713, и, кроме того, в данном случае их используют в качестве отводящих электродов в дополнение к их функции точек подвеса массосодержащей системы. Для этого с целью получения эффекта предпочтительно, чтобы оба резонатора 701, 702 конструктивно были выполнены электропроводящими, включая все корпуса, пружины и соединения. Сигнал, который отводят с помощью частей 77, 79, 711 и 713 корпуса гироскопа и подают на усилитель 60, содержит информацию о все трех колебательных режимах, его преобразуют аналого-цифровым преобразователем 61 в цифровой сигнал, который подают на модуль 62 разделения сигналов. В модуле 62 разделения сигналов этот составной сигнал разделяют на три различных сигнала: х (который содержит информацию о противофазных колебаниях), уА (который содержит информацию об отклонении вторичного осциллятора 41), а также уВ (который содержит информацию об отклонении вторичного осциллятора 42). Эти сигналы разделяют по-разному в зависимости от разновидности используемого способа несущей частоты (смотрите пункты с а) по в) выше), а разделение осуществляют путем демодуляции соответствующих сигналов используемого способа несущей частоты. Сигналы х, уА и уВ подают на модули 631-633+ демодуляции, которые выполняют их демодуляцию, используя рабочую частоту противофазных колебаний для 0° и 90°. Предпочтительно, чтобы модуль 64 управления, а также модуль 65 расчета напряжения на датчике крутящего момента для регулирования/расчета сигналов, соответственно, Fxl/r или Uxl/r имели конфигурацию, аналогичную модулю электронного блока 2, показанного на фиг.1. Предпочтительно, чтобы модуль 64 управления и модуль 65 расчета напряжения на датчике крутящего момента для регулирования/расчета сигналов FyAo/u, UyAo/u и FyBo/u, UyBo/u имели конструктивное исполнение, аналогичное модулю электронного блока 2, показанного на фиг.2
На фиг.4 показан предпочтительный вариант системы управления, обозначенной на фиг.3 позицией 64. Система управления 64 содержит с первой по третью части 641-643. Первая часть 641 содержит первичный регулятор 80, частотный генератор 81, вторичный регулятор 82, компонент электронного блока 83, суммирующий каскад 84 и умножитель 85. Способ работы первой части в основном соответствует способу работы модуля электронного блока 2, показанного на фиг.1, и поэтому еще раз здесь описан не будет. Вторая часть 642 содержит первичный регулятор 90, первичный модулятор 91, вторичный регулятор 92, вторичный модулятор 93 и третий регулятор 94. Кроме того, предусмотрены первичный и вторичный суммирующие каскады 95, 96. Сигнал скорости поворота  можно измерить на выходе первичного регулятора 90, а на выходе третьего регулятора 94 можно измерить составной сигнал, содержащий компенсацию поперечного смещения ВQ1 и ускорение А. Третья часть 643 системы управления 64 содержит первичный регулятор 100, первичный модулятор 101, вторичный регулятор 102, вторичный модулятор 103 и третий регулятор 104. Кроме того, предусмотрены первичный и вторичный суммирующие каскады 105, 106. Сигнал скорости поворота
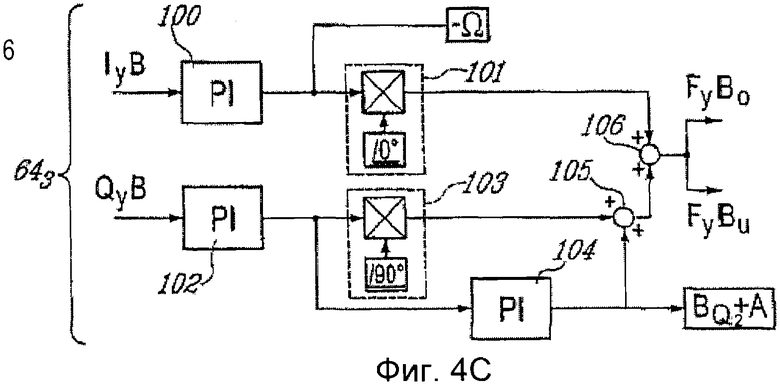
можно измерить на выходе первичного регулятора 90, а на выходе третьего регулятора 94 можно измерить составной сигнал, содержащий компенсацию поперечного смещения ВQ1 и ускорение А. Третья часть 643 системы управления 64 содержит первичный регулятор 100, первичный модулятор 101, вторичный регулятор 102, вторичный модулятор 103 и третий регулятор 104. Кроме того, предусмотрены первичный и вторичный суммирующие каскады 105, 106. Сигнал скорости поворота  с отрицательным математическим знаком может быть отведен на выходе первичного регулятора 100, а на выходе третьего регулятора 104 может быть отведен составной сигнал, включающий компоненту компенсации поперечного смещения ВQ2 с отрицательным математическим знаком и сигнал ускорения А. Способ эксплуатирования второй и третей частей 642 и 643 соответствует способу эксплуатирования модуля электронного блока 2, проиллюстрированного на фиг.1, и поэтому еще раз здесь описан не будет.
с отрицательным математическим знаком может быть отведен на выходе первичного регулятора 100, а на выходе третьего регулятора 104 может быть отведен составной сигнал, включающий компоненту компенсации поперечного смещения ВQ2 с отрицательным математическим знаком и сигнал ускорения А. Способ эксплуатирования второй и третей частей 642 и 643 соответствует способу эксплуатирования модуля электронного блока 2, проиллюстрированного на фиг.1, и поэтому еще раз здесь описан не будет.
Только сигналы для приведения к первоначальному значению угловой скорости и сдвига по фазе на 90° после умножения на рабочую частоту проходят вместе с напряжениями постоянного тока для вспомогательного поперечного регулятора к паре комбинированных электродов. Вследствие этого осуществляют суммирование обоих сигналов, так что расчет напряжений на электродах включает сигналы, приводящие к первоначальному значению частоту колебаний, и сигнал постоянного тока для поперечного регулирования. Затем рассчитанные таким образом напряжения на электродах Uxl/r, UyAo/u и UyBo/u добавляют к сигналам несущей частоты и с помощью аналого-цифровых преобразователей 661-666 совместно передают на электроды.
Преимущество описанных выше способов несущей частоты с противофазным возбуждением состоит в том, что к усилителю 60 сигнал подводят только в момент отклонения линейных осцилляторов 31, 32, а также 41 и 42. Используемые для возбуждения частотные сигналы могут быть дискретными частотами или иметь прямоугольную форму. Возбуждение сигналами прямоугольной формы предпочтительно вследствие простоты их получения и обработки.
В последующем тексте будет также дано описание ряда методик, относящихся к измерительной точности способа измерения ускорения в соответствии с изобретением.
Угловая скорость приводит к возникновению противофазного отклонения осцилляторов 41 и 42 от рабочей частоты кориолисова гироскопа; в противоположность этому, ускорение приводит к возникновению синфазного отклонения осцилляторов 41 и 42, в случае которого ускорение можно измерить в диапазоне частот от 0 Гц до около 500 Гц с измерительной точностью от 50 миллигал до 50 микрогал.
Подлежащее измерению синфазное отклонение составляет:
α - угол отклонения;
а - ускорение;
l - длина пружины;
ω - частота собственных колебаний осцилляторов 41-42.
Для обычных частот собственных колебаний ω=2·пf=6000 рад/с...60000 рад/с и при длинах пружин кориолисова гироскопа l=1 мм, точности измерения, например, 5 миллигал это составляет:
α=1.4·10-6...1.4·10-8 рад или х2=xl=1,4 нм...14 пм.
Такие малые отклонения тяжело измерить в диапазоне частот от 0 до 500 Гц. По крайней мере это требует дополнительного усложнения электронного блока для многосенсорного измерительного устройства в соответствии с изобретением, так как электронный блок должен выполнить очень точные измерения как в рабочем диапазоне функционирования гироскопа (измерение угловой скорости) от 1 до 10 кГц, так и в рабочем диапазоне измерения ускорения от 0 до 500 Гц.
В соответствии с изобретением этот недостаток можно преодолеть с помощью поперечного регулирования, как описано выше, для массосодержащей системы, включающей два линейных осциллятора (фиг.1 и 2), для массосодержащей системы, составленной из четырех линейных осцилляторов (фиг.3):
ускорение расстраивает ортогональную погрешность, что приводит к синфазному поперечному сигналу, который ясно виден в осцилляторах 41 и 42 на рабочей частоте:
Здесь  Q - поперечная угловая скорость, aQ - поперечное ускорение и as - ускорение осциллятора.
Q - поперечная угловая скорость, aQ - поперечное ускорение и as - ускорение осциллятора.
Для измерительной точности, например, 5 миллигал (α=1,4·10-6 рад), это приводит к:
 при частоте собственных колебаний 1 кГц
при частоте собственных колебаний 1 кГц
 при частоте собственных колебаний 10 кГц.
при частоте собственных колебаний 10 кГц.
Для датчика угловой скорости 5°/ч угловая поперечная скорость 866°/ч может быть достоверно подтверждена использованием того же электронного блока, в то время как, в отличие от этого, при частоте собственных колебаний 10 Гц и угловой поперечной скорости 8,7°/ч допуск на предельное значение датчика угловой скорости фактически исчерпан. Хотя в долгосрочной перспективе такое измерение также устойчиво, оно зависит от устойчивости угловой поперечной скорости во временном плане. Фактическая угловая поперечная скорость представляет собой противофазный сигнал. Вследствие этого устойчивость измерения ускорения зависит от разности угловых поперечных скоростей осциллятора 41 и 42 и их стабильности. Так как оба осциллятора близко расположены друг к другу и изготовлены на одном технологическом переходе, то теоретически можно предположить, что будет покрыт низкоточный диапазон от 50 миллигал до 50 микрогал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСИРОВАНИЯ ПОПЕРЕЧНОГО СМЕЩЕНИЯ В КОРИОЛИСОВЕ ГИРОСКОПЕ, А ТАКЖЕ КОРИОЛИСОВ ГИРОСКОП, КОТОРЫЙ ПРИГОДЕН ДЛЯ ЭТОЙ ЦЕЛИ | 2004 |
|
RU2327109C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| КОРИОЛИСОВ ГИРОСКОП | 2008 |
|
RU2439495C2 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ДЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2580879C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2289100C1 |
| Способ управления четырехмассовым резонатором в микромеханическом гироскопе | 2023 |
|
RU2825192C1 |
| СПОСОБ РАБОТЫ КОРИОЛИСОВА ГИРОСКОПА И ЭЛЕКТРОННЫЙ БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2328701C2 |
| ОСЕСИММЕТРИЧНЫЙ КОРИОЛИСОВЫЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2476824C2 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2444703C1 |
Изобретение относится к измерениям ускорений с использованием в качестве датчика угловой скорости кориолисова гироскопа. Кориолисов гироскоп включает первичный и вторичный резонаторы (701, 702), каждый из которых выполнен в виде связанной системы, содержащей первичный и вторичный линейные осцилляторы (31, 32, 41, 42), при этом первичный резонатор (701) вместе со вторичным резонатором (702) способен к совершению колебательных движений в противофазе по отношению друг к другу вдоль общей оси колебаний (72). Преимущества связанной таким образом системы заключаются в том, что угловую скорость и ускорение можно измерять одновременно, при этом система нечувствительна к влияниям помех, например вибрациям, воздействующим снаружи или изнутри. 2 н. и 2 з.п. ф-лы, 4 ил.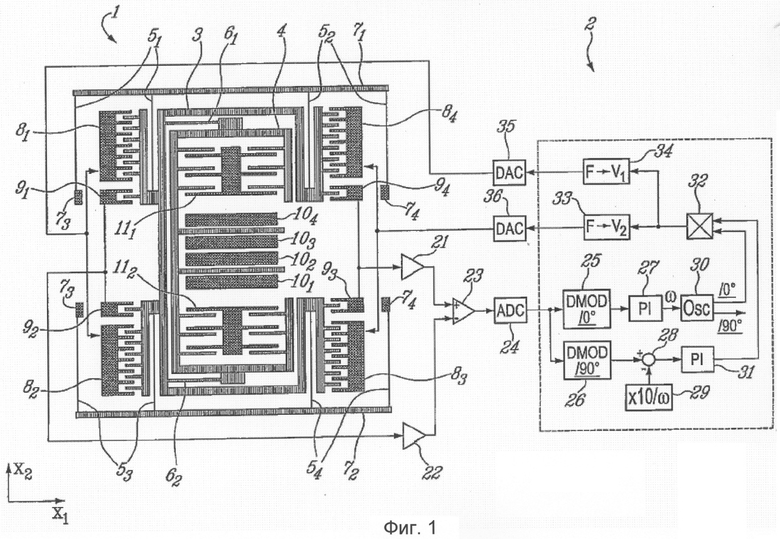
два резонатора (701, 702) вынуждают совершать колебательные движения в противофазе друг с другом вдоль общей оси колебаний (72), отклонения вторичных осцилляторов (41, 42) сравнивают друг с другом с целью определения составляющей противофазного отклонения, которая представляет собой количественную характеристику подлежащей измерению угловой скорости и/или с целью определения общей составляющей синфазного отклонения, которая представляет собой количественную характеристику подлежащего измерению ускорения, рассчитывают подлежащие измерению угловую скорость/ускорение, исходя из составляющей синфазного отклонения/составляющей противофазного отклонения, при этом указанную составляющую общего синфазного отклонения определяют следующим образом: определяют первичное поперечное смещение, которое происходит внутри первичного резонатора (701), определяют вторичное поперечное смещение, которое происходит внутри вторичного резонатора (702), рассчитывают первичное поперечное смещение, используя вторичное поперечное смещение, для определения составляющей общего поперечного смещения, пропорциональной подлежащему измерению ускорению и представляющей составляющую общего синфазного отклонения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE 4442033 А1, 30.05.1996 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЕР 1253399 А1, 30.10.2002 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |

