Изобретение относится к способу работы Кориолисова гироскопа и к электронному блоку контроля и управления для осуществления способа.
Кориолисовы гироскопы (также называемые вибрационными гироскопами) все шире используются в навигации. Примеры Корилиосовых гироскопов, в частности, представлены в патентах US 5992233, DE 19739903, EP 1072893. Кориолисовы гироскопы представляют собой инерционную систему, находящуюся в состоянии вынужденных колебаний. Это колебательное движение, вообще говоря, является суперпозицией большого числа индивидуальных колебаний. Эти индивидуальные колебания инерционной системы прежде всего являются не зависимыми друг от друга и каждое может быть рассмотрено как некий абстрактный «резонатор». По меньшей мере два резонатора требуются для функционирования вибрационного гироскопа: колебания одного из них (первого) являются вынужденными, что далее по тексту называется «возбуждающие колебания». Колебания другого резонатора (второго) возбуждаются только тогда, когда вибрационный гироскоп перемещается и/или вращается. Происходит это потому, что в этом случае появляются Кориолисовы силы, которые связывают первый и второй резонаторы, поглощают энергию вынужденных колебаний первого резонатора и передают ее считываемым колебаниям второго резонатора. Колебания второго резонатора далее в тексте называются «считываемыми колебаниями». Для того чтобы определить параметры движения (в частности, вращения) Кориолисова гироскопа, считываемые колебания отводятся и передаются в виде соответствующего сигнала чтения (например, такого отведенного сигнала считанных колебаний), который в свою очередь анализируется на наличие изменений в амплитуде, которые будут пропорциональны скорости вращения Кориолисова гироскопа. Кориолисовы гироскопы могут быть выполнены как системы без обратной связи и системы с обратной связью. В системе с обратной связью амплитуда считываемых колебаний постоянно установлена в фиксированное значение - предпочтительно нулевое - через соответствующую цепь управления.
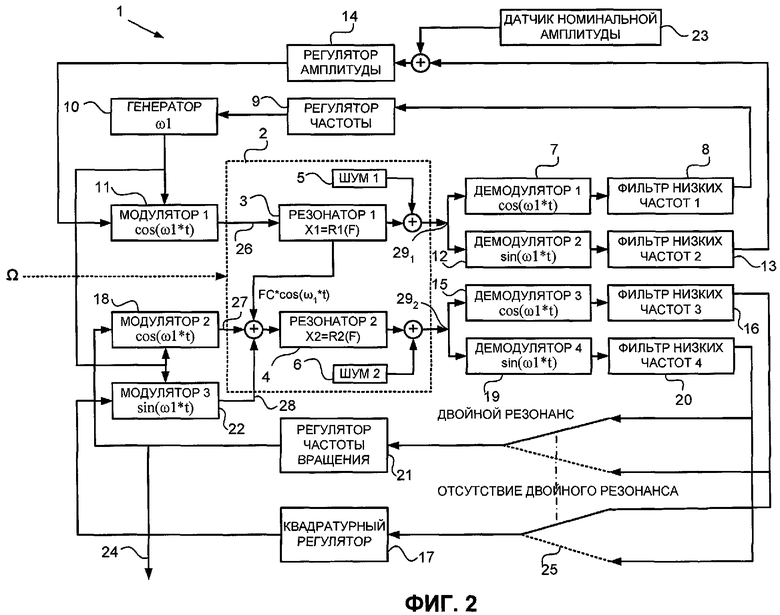
Один из примеров Кориолисова гироскопа, выполненного в виде системы с обратной связью, описан далее со ссылкой на фигуру 2 для более подробной иллюстрации особенностей работы Кориолисова гироскопа.
Кориолисов гироскоп 1 имеет совокупность масс (инерционную систему) 2, которая может быть приведена в состояние вынужденных колебаний и которая далее называется «резонатором». Следует различать данный резонатор и «абстрактные» резонаторы, упоминавшиеся выше, которые представляют собой индивидуальные колебания «реального» резонатора. Как указывалось ранее, резонатор 2 может рассматриваться как совокупность двух «резонаторов» (первый резонатор 3, второй резонатор 4). Каждый из резонаторов 3, 4 связан с датчиком силы (не показан) и со считывающей системой (не показана). Шум, который генерирует датчик силы и считывающая система, схематично показан здесь как Noise1 (позиция 5) и Noise2 (позиция 6).
Далее, Кориолисов гироскоп имеет четыре контура управления.
Первый контур управления используют для управления возбуждающими колебаниями (то есть частотой первого резонатора 3) таким образом, чтобы поддерживать постоянную частоту колебаний (резонансную частоту). Первый контур управления содержит первый демодулятор 7, первый фильтр 8 низких частот, регулятор 9 частоты, генератор 10, управляемый напряжением, и первый модулятор 11.
Второй контур управления предназначен для обеспечения постоянной амплитуды возбуждающих колебаний и содержит второй демодулятор 12, второй фильтр 13 низких частот и регулятор 14 амплитуды.
Третий и четвертый контуры управления предназначены для удержания нулевых значений сил, стимулирующих считываемые колебания. Третий контур управления содержит третий демодулятор 15, третий фильтр 16 низких частот, квадратурный регулятор 17 и третий модулятор 22. Четвертый контур управления содержит четвертый демодулятор 19, четвертый фильтр 20 низких частот, регулятор 21 частоты вращения и второй модулятор 18.
Колебания первого резонатора 3 возбуждают на его резонансной частоте ω1. Результирующие возбужденные колебания считывают, демодулируют по фазе с помощью первого демодулятора 7, а демодулированный сигнал подают на первый фильтр 8 низких частот, который удаляет из него комбинационные частоты. Считанный сигнал далее по тексту называется «считанный сигнал возбуждающих колебаний». Выходной сигнал первого фильтра 8 низких частот подают на регулятор 9 частоты, который, в свою очередь, управляет генератором 10, управляемым напряжением (далее по тексту ГУН), в функциональной зависимости от сигнала, поданного на него, таким образом, что синфазная компонента стремится к нулю. Для этого ГУН 10 подает сигнал на первый модулятор 11, который управляет датчиком силы таким образом, что возбуждающая сила прикладывается к первому резонатору 3. Если синфазная компонента равна нулю, первый резонатор 3 колеблется на своей резонансной частоте ω1. Следует упомянуть, что все модуляторы и демодуляторы работают на частоте ω1.
Считанный сигнал возбуждающих колебаний также поступает во второй контур управления и демодулируется вторым демодулятором 12, выход которого подается на второй фильтр низких частот 13, выход которого, в свою очередь, подается на регулятор амплитуды 14. Регулятор амплитуды 14 управляет первым модулятором 11 в функциональной зависимости от этого сигнала и от сигнала датчика 23 номинальной амплитуды таким образом, что первый резонатор 3 возбуждается с постоянной амплитудой (то есть возбужденные колебания имеют постоянную амплитуду).
Как уже указывалось, Кориолисовы силы, обозначенные на фигуре формулой FC·cos(ω1·t), появляются при движении/вращении Кориолисова гироскопа 1 и связывают первый резонатор 3 со вторым резонатором 4 и тем самым вынуждают второй резонатор колебаться. Считываемые колебания имеют частоту ω2, а соответствующий выходной сигнал считываемых колебаний (сигнал чтения) подается на третий и четвертый контуры управления. В третьем контуре управления этот сигнал демодулируют третьим демодулятором 15, комбинационные частоты, появляющиеся при этом, подавляют третьим фильтром низких частот 16, откуда сигнал передают на квадратурный регулятор 17, выходной сигнал которого подается на третий модулятор 22 для обнуления квадратурной компоненты считываемых колебаний. Аналогично в четвертом контуре управления выходной сигнал считываемых колебаний демодулируют четвертым демодулятором 19, далее он проходит через четвертый фильтр 20 низких частот и направляется на регулятор 21 скорости вращения, чей выходной сигнал пропорционален текущей скорости вращения, и передается как результат измерения скорости вращения на выход скорости вращения 24 и, с другой стороны, на второй модулятор 18, который сводит к нулю соответствующие компоненты скорости вращения в считываемых колебаниях.
Кориолисов гироскоп, описанный выше, может работать в режиме двойного резонанса и в режиме отсутствия двойного резонанса. Если Кориолисов гироскоп работает в режиме двойного резонанса, тогда частота считываемых колебаний ω2 приблизительно равна частоте возбуждающих колебаний ω1, тогда как в режиме отсутствия двойного резонанса частота ω2 считываемых колебаний отличается от частоты ω1 возбуждающих колебаний. В случае двойного резонанса информацию о скорости вращения содержит выходной сигнал четвертого фильтра 20 низких частот, в то время как в режиме отсутствия двойного резонанса информацию о скорости вращения содержит выходной сигнал третьего фильтра 16 низких частот. Для того чтобы обеспечить переключение между режимами резонанса, установлен сдвоенный переключатель 25, который подключает выходы третьего и четвертого фильтров 16, 20 низких частот к регулятору 21 частоты вращения и квадратурному регулятору 17.
Конструкция Кориолисова гироскопа, описанного выше, в особенности конструкция электронного блока контроля и управления, дает возможность обеспечить достаточно высокую чувствительность к частоте вращения при простой конструкции резонатора 2. Однако недостатком такой конструкции Кориолисова гироскопа является высокая сложность электронных компонентов узла контроля и управления. Для реализации Кориолисова гироскопа, показанного на фигуре 2 (например, компонентов на позициях 26, 27 и 28), необходимо большое число цифроаналоговых преобразователей, а эти преобразователи дороги и энергоемки. Кроме того, необходимо отметить, что цифроаналоговые преобразователи часто требуют большого числа номиналов питающего напряжения и их сопряжение с другими электронными компонентами, в особенности цифровыми, сложно, что усложняет миниатюризацию. Кроме того, по меньшей мере два преобразователя аналог/цифра должны использоваться в реализации Кориолисова гироскопа, показанного на фигуре 2 (компоненты, обозначенные номерами 291 и 292).
Задачей настоящего изобретения является разработка такого способа работы Кориолисова гироскопа с двойным резонансом, для реализации которого потребовалось бы минимальное количество электронных компонентов, в частности аналого-цифровых и цифроаналоговых преобразователей, что позволило бы производить Кориолисовы гироскопы с дешевой и миниатюрной электроникой контроля/управления.
Известен способ работы Кориолисова гироскопа, описанный в заявке WO 03/073763, согласно которому для преобразования аналогового колебательного сигнала, представляющего собой колебательное состояние резонатора, в последовательность цифровых импульсов используют компаратор. Компаратор сравнивает моментальные значения амплитуды колебаний с пороговым значением. Если моментальное значение выше пороговой величины, то компаратор производит первый выходной сигнал. Если моментальное значение ниже пороговой величины, то компаратор производит второй выходной сигнал. Последовательость из первого и второго выходных сигналов таким образом образует последовательность цифровых импульсов. В этой связи можно также упомянуть патент США 3917928, патент США 3642334, патент Германии DE 19635923 и патент США 6255760.
Поставленная задача решена посредством способа в соответствии с признаками пункта 1 формулы изобретения. Согласно изобретению также предложен электронный блок контроля и управления согласно пункту 7 формулы изобретения. Наконец, пункт 8 формулы изобретения описывает импульсный модулятор для осуществления способа согласно данному изобретению. Улучшения и усовершенствования идеи изобретения содержатся в соответствующих зависимых пунктах формулы изобретения.
Согласно изобретению в способе работы Кориолисова гироскопа вырабатываются цифровые сигналы считывания, которые представляют собой измеренные текущие значения амплитуд/частот возбуждающих/считываемых колебаний резонатора Кориолисова гироскопа или других параметров возбуждающих/считываемых колебаний. К резонатору Кориолисова гироскопа приложены силы, значения которых вырабатывают как функцию цифровых сигналов считывания таким образом, что возбуждающие/считываемые колебания принимают заданные значения амплитуды/частоты или других желаемых параметров. Например, амплитуду считываемых колебаний в системе с замкнутой обратной связью устанавливают в нулевое значение, а амплитуду возбуждающих колебаний устанавливают в некоторое фиксированное значение, отличное от нуля. Сигналы управления силами вырабатывают из квантованных выходных сигналов импульсного модулятора, на вход которого подают цифровые возбуждающие/компенсационные сигналы, полученные из цифровых сигналов считывания. Квантованные выходные сигналы представляют собой последовательность импульсов с постоянной частотой.
Способ согласно изобретению может быть применен одинаково эффективно к Кориолисовым гироскопам как в режиме двойного резонанса, так и в режиме отсутствия двойного резонанса, как в системе с разомкнутой, так и с замкнутой обратной связью.
Согласно изобретению вместо преобразователей аналог/цифра применяют импульсный модулятор. Выходные сигналы импульсного модулятора предпочтительно квантовать в троичный код. Так как троичное кодирование особенно эффективно в двухэлектродной схеме электростатического датчика силы, его используют для Кориолисова гироскопа с двойным резонансом.
В одной из предпочтительных реализации импульсный модулятор вырабатывает первый и второй выходные сигналы, каждый из которых троично кодирован, причем первый сигнал преобразуют в первую последовательность троично кодированных силовых импульсов, а второй сигнал преобразуют во вторую последовательность троично кодированных силовых импульсов. В этом случае первая последовательность силовых импульсов представляет собой ту часть силовых сигналов, которую используют для установки желаемых амплитуд/частот или других параметров возбуждающих колебаний, а вторая последовательность силовых импульсов представляет собой ту часть силовых сигналов, которую используют для установки амплитуды/частоты или других желаемых параметров считываемых колебаний.
Импульсный модулятор может быть также построен таким образом, что два его троично квантованных выходных сигнала S1, S2 могут иметь значения {-1, 0, +1} и быть отображены любым подходящим цифровым кодом. Выходные сигналы преобразовывают в импульсы электрического напряжения и прикладывают к соответствующим неподвижным электродам таким образом, что на движение структуры электродов Кориолисова гироскопа (движущихся масс и возвратных пружин) действует «отрицательная» сила (S1=-1), отсутствует действие сил (S1=0) или действует «положительная» сила (S1=1). Аналогичное описание применимо к сигналу S2.
Цифровые сигналы считывания предпочтительно вырабатывают таким образом, что при этом электрический заряд, перетекающий на движущийся электрод (центральный электрод) при колебаниях резонатора, определяется с помощью измерителя заряда, соответствующий аналоговый выходной сигнал измерителя заряда преобразуется в цифровой выходной сигнал, а цифровые сигналы считывания можно было бы определить из выходного цифрового сигнала измерителя заряда путем разделения сигналов как функцию моментальных текущих и/или предыдущих значений троично квантованных значений выходных сигналов импульсного модулятора. Отсюда следует, что цифровые сигналы считывания не могут быть получены сами по себе из цифрового выходного сигнала измерителя заряда, а требуется еще информация, содержащаяся в троично квантованных сигналах импульсного модулятора. Выражение «центральный электрод» в данном случае соответствует внутренней движущейся структуре Кориолисова гироскопа, состоящей из подвижной массы, которая может находиться в состоянии вынужденных колебаний, и соответствующих возвратных пружин, или по меньшей мере, частей указанных компонентов.
Цифровые сигналы считывания в каждом случае разделяют обычным способом при демодуляции на нормальную и квадратурную компоненты. Нормальную и квадратурную компоненты цифровых сигналов возбуждения/компенсации вырабатывают затем с помощью блока управления из нормальной и квадратурной компоненты цифровых сигналов считывания и подают их на импульсный модулятор. Цифровыми сигналами возбуждения/компенсации управляют таким образом, чтобы для возбуждающих/считываемых колебаний были установлены желаемые значения параметров.
Для реализации способа, описанного выше, согласно изобретению предложен электронный блок контроля/управления для применения в Кориолисовом гироскопе, имеющий следующие компоненты:
- блок выработки цифровых сигналов считывания, которые представляют собой измерения моментальных значений амплитуды/частоты или других параметров колебаний возбуждения/считывания резонатора Кориолисова гироскопа,
- по меньшей мере один контур управления, в котором силовые сигналы вырабатываются в функции от сигналов считывания и подаются на резонатор, причем силовыми сигналами управляют таким образом, что возбуждающие/считываемые колебания имеют заданную амплитуду/частоту или заданное значение других параметров,
- импульсный модулятор, являющийся составной частью контура управления, на который подаются цифровые сигналы возбуждения/компенсации, полученные из цифровых сигналов считывания, что позволяет выработать силовые сигналы из квантованных выходных сигналов импульсного модулятора. Квантованные выходные сигналы представляют собой последовательность импульсов с постоянной частотой.
Преимуществами электронного блока контроля/управления согласно изобретению являются его низкая стоимость и высокая степень миниатюризации.
Согласно изобретению импульсный модулятор для преобразования комплексного входного сигнала в импульсный сигнал имеет блок вычитания, который вырабатывает сигнал ошибки управления из разности между комплексным входным сигналом и сигналом обратной связи. Далее, импульсный модулятор имеет блок преобразования сигнала, который преобразовывает входной сигнал ошибки в управляющий сигнал. В первом блоке умножения управляющий сигнал умножается на примесный сигнал, имеющий частоту колебаний ω0, с получением по меньшей мере одной из действительной или мнимой частей управляющего сигнала, смешанного с ω0. Дополнительно импульсный модулятор имеет блок квантования, который квантует по меньшей мере одну из действительной и мнимой частей управляющего сигнала, смещенного в верхний частотный диапазон на частоту ω0, с получением импульсного сигнала, а также блок обратной связи, который использует указанный импульсный сигнал для получения сигнала обратной связи, передаваемого в блок вычитания.
Способ работы импульсного модулятора согласно изобретению, представляющего собой эффективную модификацию обычного сигма-дельта-преобразователя, поясняется в нижеследующем тексте на примере, когда входной сигнал поддерживается постоянным без потери общности. Блоки вычитания и преобразования сигнала преобразуют входной сигнал в управляющий сигнал, который также лишь слегка изменяется во времени. В противоположность сигма-дельта-преобразователям этот управляющий сигнал умножается первым блоком умножения на комплексный примесный сигнал частоты ω0 для того, чтобы таким образом выработать управляющий сигнал, смещенный в верхний частотный диапазон на частоту ω0. Действительная часть или мнимая часть этого управляющего сигнала, представляющего собой колебания частоты ω0, далее квантуется в блоке квантования с получением на выходе этого блока действительного импульсного сигнала с основной компонентой на частоте ω0. Этот действительный импульсный сигнал своими положительными и отрицательными импульсами имитирует синусоидальный сигнал частоты ω0. В то же время этот сигнал представляет собой источник вычисления сигнала обратной связи, который передается на блок вычитания, где он вычитается из входного сигнала с целью получения сигнала ошибки управления.
Для того чтобы выработать импульсный сигнал, нет необходимости вычислять обе части, действительную и мнимую, управляющего сигнала, смещенного в верхний частотный диапазон на частоту ω0. Можно получить импульсный сигнал из действительной части смешанного управляющего сигнала и тогда мнимая часть смешанного управляющего сигнала может не использоваться.
Основное преимущество импульсного модулятора согласно изобретению по сравнению с обычными сигма-дельта-модуляторами состоит в том, что спектр шума квантования перемещается из интервала низких частот в области частоты ω=0 в область рабочей частоты ω0. Это достигнуто за счет комплексного умножения управляющего сигнала в первом блоке умножения. Результатом является импульсный сигнал, имеющий низкий уровень шума в требуемом рабочем диапазоне в области ω0.
Отправная точка для понимания шумовых характеристик состоит в том, что блок преобразования сигнала, который может содержать, например, интегратор, имеет характеристики фильтра низких частот. Это значит, что относительно высокочастотные компоненты частично подавляются в блоке преобразования сигнала. В обычных сигма-дельта-преобразователях это подавление высокочастотных компонент в контуре управления вызывает повышение шума квантования на высоких частотах. Наоборот, шум квантования на низких частотах низок. В случае импульсного модулятора согласно изобретению управляющий сигнал, который должен быть считан с выхода блока преобразования сигнала, смещен в верхний частотный диапазон на частоту ω0 путем умножения комплексного сигнала на частоту ω0. Уровень шума квантования при этом также смещается с частоты ω=0 в сторону смешивающей частоты ω0, несмотря на то, что блок преобразования сигнала по-прежнему обрабатывает несмешанный сигнал. В результате получается импульсный сигнал с низким уровнем шума в области ω0.
Импульсный модулятор согласно изобретению может быть выполнен недорогим, потребляет малую электрическую мощность и может быть легко интегрирован в цифровую электронную схему.
В импульсном модуляторе целесообразно иметь цепь синфазного сигнала для обработки действительной части входного сигнала, так же как и цепь квадратурного сигнала для обработки мнимой части входного сигнала. Также целесообразно для выработки сигнала ошибки управления, чтобы управляющий сигнал и сигнал обратной связи имели и действительную, и мнимую компоненты. Чтобы обеспечить соответствие между действительным импульсным сигналом и действительной или мнимой частью управляющего сигнала, смещенного в верхний частотный диапазон на ω0 в правильной фазе, блок вычитания, блок преобразования сигнала, первый блок умножения и блок обратной связи должны быть блоками комплексной обработки и каждый из них должен иметь цепь синфазного и цепь квадратурного сигнала. Однако только действительная часть (или только мнимая часть) выходного сигнала первого блока умножения требуется для вычисления действительного импульсного сигнала в блоке квантования. Блок квантования, следовательно, может быть блоком обработки действительного сигнала. Фактически действительный импульсный сигнал затем еще раз преобразовывается в комплексный сигнал обратной связи в блоке обратной связи. Данная конструкция импульсного модулятора позволяет синтезировать действительный импульсный сигнал, который воспроизводит гармонические колебания на частоте ω0 с низким фазовым и амплитудным шумом, в правильной фазе.
Согласно одной из эффективных реализаций изобретения блок преобразования сигнала имеет в своем составе блок интегратора, осуществляющего интегрирование сигнала ошибки управления и вырабатывающего проинтегрированный сигнал как сигнал управления. Интегрирование сигнала ошибки управления делает возможным постоянно отслеживать (комплексный) интегрированный сигнал по комплексному входному сигналу. Так как блок интегратора имеет характеристики фильтра низких частот, выходной сигнал интегратора имеет низкий уровень шума в области ω=0. Если этот управляющий сигнал затем смешивается в первом блоке умножения и затем квантуется, результирующий импульсный сигнал имеет желаемые шумовые характеристики.
В блоке интегратора целесообразно иметь первый интегратор для цепи синфазного сигнала и второй интегратор для цепи квадратурного сигнала, причем первый интегратор обрабатывает действительную часть сигнала ошибки управления, а второй - его мнимую часть. Таким образом, блок комплексного интегратора может быть реализован при помощи двух отдельных интеграторов.
В блоке преобразования сигнала целесообразно иметь блок усилителя. Коэффициент усиления в этом случае выбирается таким, чтобы квантователь получал требуемый уровень входного сигнала.
Согласно дальнейшему улучшению реализации изобретения первый блок умножения имеет в своем составе первый умножитель для синфазного сигнала и второй умножитель, обрабатывающий квадратурный сигнал. Первый умножитель умножает действительную часть управляющего сигнала на действительную часть комплексного смесительного сигнала частоты ω0 и таким образом вырабатывает первый результирующий сигнал. Второй умножитель умножает мнимую часть управляющего сигнала на мнимую часть комплексного смесительного сигнала частоты ω0 и таким образом производит второй результирующий сигнал. Согласно дальнейшей усовершенствованной реализации импульсный модулятор имеет в своем составе сумматор, складывающий первый результирующий сигнал от первого умножителя и второй результирующий сигнал от второго умножителя и вычисляет тем самым суммарный сигнал для определения действительной части смешанного управляющего сигнала.
Если представить комплексный управляющий сигнал в виде R+j·I и, например, комплексный смешивающий сигнал в виде  , имеем первый результирующий сигнал с выхода первого умножителя в виде R·cos(ω0t). Второй результирующий сигнал с выхода второго умножителя имеет вид I·sin(ω0t), а сумматор вырабатывает сигнал вида R·cos(ω0t)+I·sin((ω0t). Однако этот сигнал в точности соответствует действительной части
, имеем первый результирующий сигнал с выхода первого умножителя в виде R·cos(ω0t). Второй результирующий сигнал с выхода второго умножителя имеет вид I·sin(ω0t), а сумматор вырабатывает сигнал вида R·cos(ω0t)+I·sin((ω0t). Однако этот сигнал в точности соответствует действительной части  Действительная часть комплексного результата комплексного умножения управляющего сигнала и смесительного сигнала таким образом может быть определена с помощью первого умножителя, второго умножителя и сумматора.
Действительная часть комплексного результата комплексного умножения управляющего сигнала и смесительного сигнала таким образом может быть определена с помощью первого умножителя, второго умножителя и сумматора.
Согласно одной из усовершенствованных реализаций изобретения суммарный сигнал, вырабатываемый сумматором, затем квантуют в блоке квантования для получения действительного импульсного сигнала.
В этом случае, с точки зрения уровня шума, целесообразно добавлять его ко входному сигналу блока квантования. Импульсный модулятор тактируется частотой выборки ωA, которая должна быть значительно выше частоты смесителя ω0. Некоторые соотношения частот ω0 и ωA приводят к появлению релаксационных колебаний в импульсном модуляторе, которые видны как дополнительные всплески на частотном спектре импульсного сигнала. Если шумовой сигнал добавляется к входному сигналу квантователя, в результате квантования он статистически округляется. Этот трюк делает возможным предотвратить образование релаксационных колебаний.
Блок квантования выполняет, как правило, двоичное или троичное квантование соответствующего входного сигнала. В случае двоичного квантования импульсный сигнал может принимать только значения 0 или 1. Поэтому выходной импульсный сигнал будет иметь только импульсы положительного значения напряжения. Троично квантованный сигнал может принимать значения -1, 0, 1. Такой импульсный сигнал содержит импульсы положительного и отрицательного значений напряжения. Поэтому троичное квантование применяется всегда, когда нужно, чтобы импульсный сигнал содержал как положительные, так и отрицательные импульсы.
В блоке обратной связи целесообразно иметь второй блок умножения, который умножает импульсный сигнал на комплексно-сопряженный примесный сигнал, имеющий частоту ω0, и тем самым вырабатывает сигнал обратной связи, смешанный с понижением частоты с ω0 для подачи на вход вычитателя. Импульсный сигнал был выработан путем квантования действительной части смешанного с повышением частоты управляющего сигнала и таким образом имеет основную частотную компоненту на частоте ω0. Перед тем как импульсный сигнал может быть использован как сигнал обратной связи, он должен таким образом быть преобразован с понижением частоты в полосу частот исходных сигналов. Для этой цели импульсный сигнал умножается на комплексно-сопряженный примесный сигнал, имеющий частоту ω0.
Во втором блоке умножения целесообразно иметь третий умножитель для получения действительной части сигнала обратной связи, а также четвертый умножитель для получения мнимой части сигнала обратной связи. Причем третий умножитель умножает импульсный сигнал на действительную часть комплексно-сопряженного смесительного сигнала частоты ω0, а четвертый умножитель умножает импульсный сигнал на мнимую часть комплексно-сопряженного смесительного сигнала частоты ω0. Для того чтобы сместить частотную компоненту импульсного сигнала с частоты комплексно-сопряженного смесительного сигнала частоты ω0 в правильном направлении, умножение импульсного сигнала на примесный сигнал должно быть выполнено в комплексной форме. Импульсный сигнал y(t) является действительным сигналом, а комплексно-сопряженный примесный сигнал может быть представлен в виде  . Комплексное умножение приводит к получению комплексного сигнала обратной связи с действительной частью y(t)·cos(ω0t) и мнимой частью y(t)·sin(ω0t).
. Комплексное умножение приводит к получению комплексного сигнала обратной связи с действительной частью y(t)·cos(ω0t) и мнимой частью y(t)·sin(ω0t).
Предпочтительно, чтобы импульсный модулятор работал на частоте выборки ωA, которая от 2 до 1000 раз выше, чем частота смесителя ωо. Это необходимо для удовлетворения условия Найквиста для смесителя с повышением частоты.
Согласно дальнейшей усовершенствованной реализации импульсный модулятор выполняют с помощью цифрового сигнального процессора (DSP). Все операции, выполняемые импульсным модулятором, могут быть запрограммированы в виде процедур обработки сигналов.
Управляющая схема согласно изобретению для микромеханического резонатора имеет по меньшей мере один импульсный модулятор типа, описанного выше. Импульсный сигнал, который вырабатывается по меньшей мере одним импульсным модулятором, целесообразно использовать для возбуждения электростатических колебаний резонатора. Импульсный сигнал может быть подключен непосредственно к возбуждающим электродам резонатора. В этом случае целесообразно, чтобы смесительная частота ω0 импульсного модулятора соответствовала одной из резонансных частот резонатора, потому что это обеспечивает эффективное возбуждение генерации.
Генератор частоты согласно изобретению для синтеза импульсного сигнала заданной частоты и с заданной фазой имеет по меньшей мере один импульсный модулятор, аналогичный описанному выше. Импульсный модулятор согласно изобретению можно использовать для того, чтобы вырабатывать соответствующий импульсный сигнал y(t) с заданной частотой и фазой. В этом случае фазовый угол вырабатываемого сигнала может быть задан весьма точно путем выбора соотношения между действительной и мнимой частью входного сигнала x(t). Генерируемый импульсный сигнал имеет низкий уровень шума в окрестности ω0.
Согласно следующей усовершенствованной реализации после импульсного модулятора устанавливают полосовой фильтр. Этот выходной полосовой фильтр позволяет отфильтровать частотные компоненты, удаленные от ω0 и имеющие высокий уровень шума.
Изобретение и дальнейшие усовершенствования пояснены в нижеследующем тексте со ссылками на поясняющие примеры реализации чертежи, на которых:
Фигура 1 показывает одну из предпочтительных реализаций электронного блока контроля/управления согласно изобретению и способ согласно изобретению;
Фигура 2 схематично показывает конструкцию Кориолисова гироскопа;
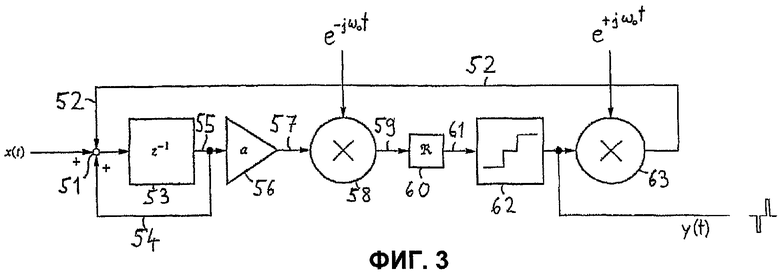
Фигура 3 показывает комплексную структурную схему импульсного модулятора согласно изобретению;
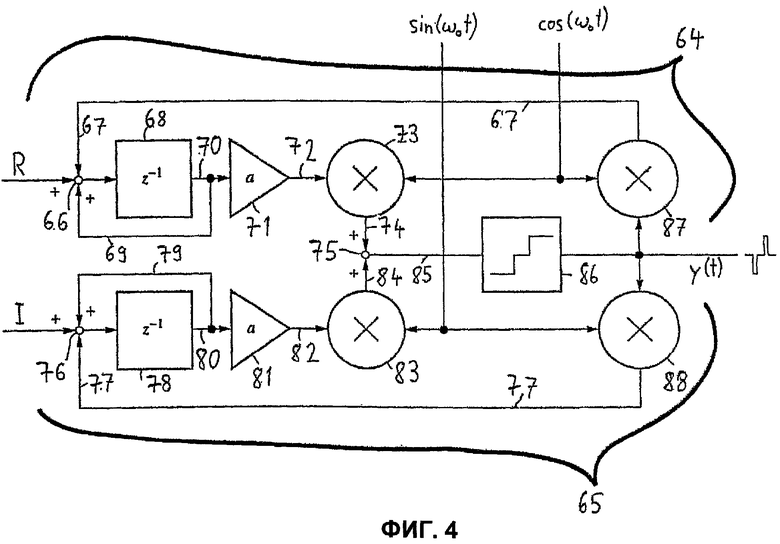
Фигура 4 показывает структурную схему импульсного модулятора, показывая синфазную и квадратурную цепь раздельно;
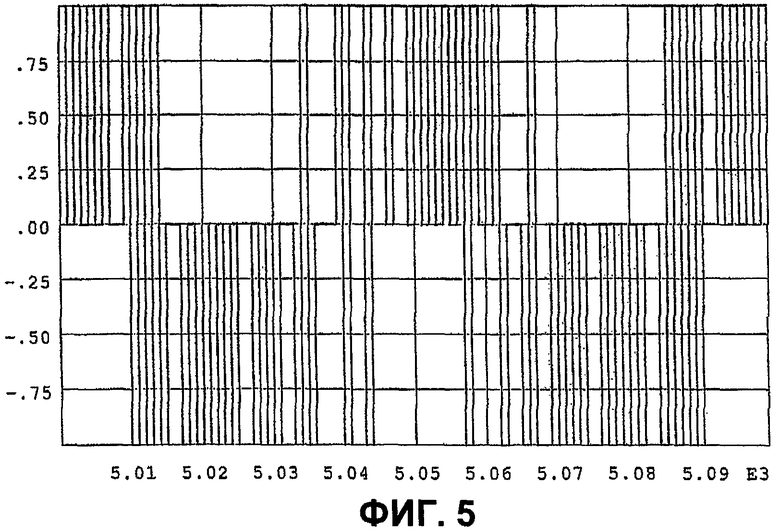
Фигура 5 показывает троично квантованный импульсный сигнал y(t);
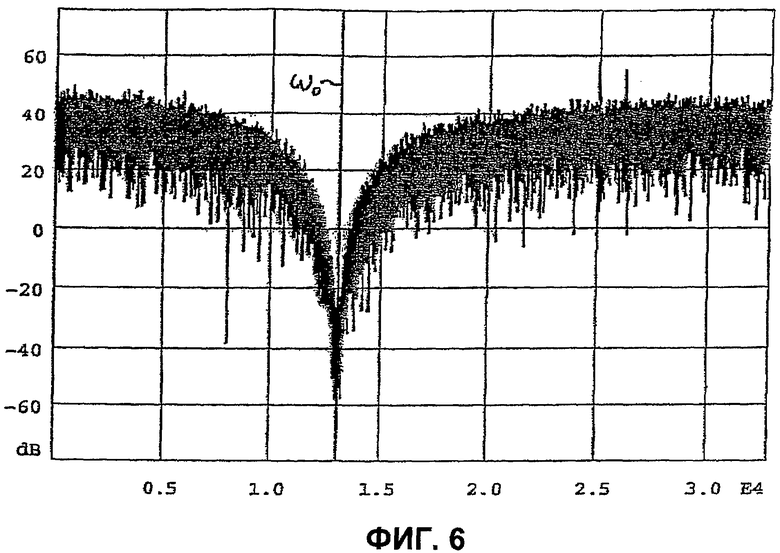
Фигура 6 показывает частотный спектр импульсного сигнала y(t), получаемого на выходе квантователя;
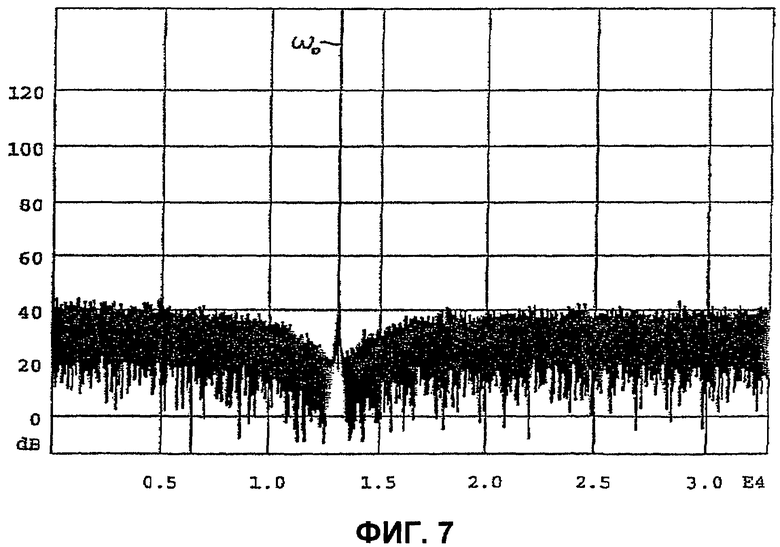
Фигура 7 показывает частотный спектр согласно фигуре 6, но после фильтрации микромеханическим генератором;
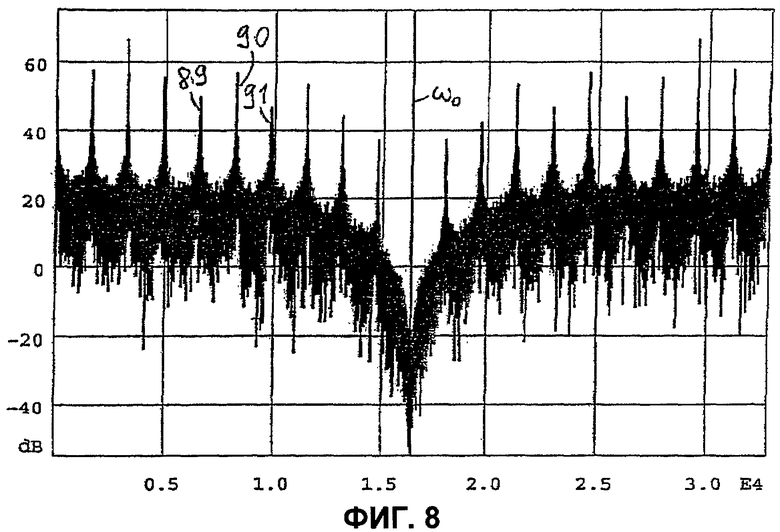
Фигура 8 показывает частотный спектр импульсного сигнала y(t), полученного для отношения частоты смесителя к частоте выборки ω0/ωA=0.25;
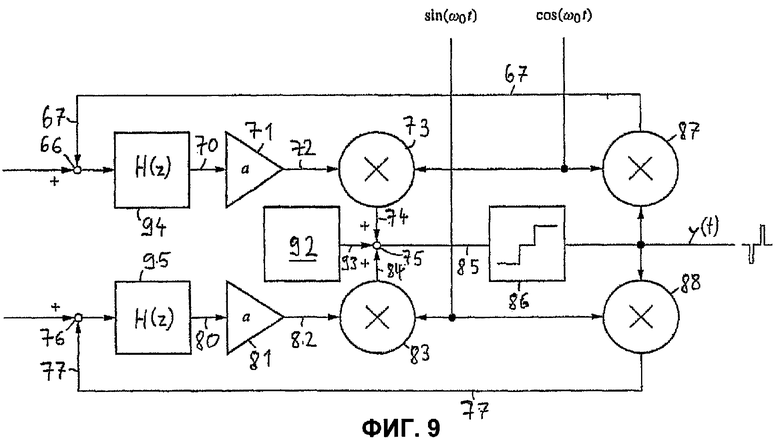
Фигура 9 показывает импульсный модулятор со статистическим округлением;
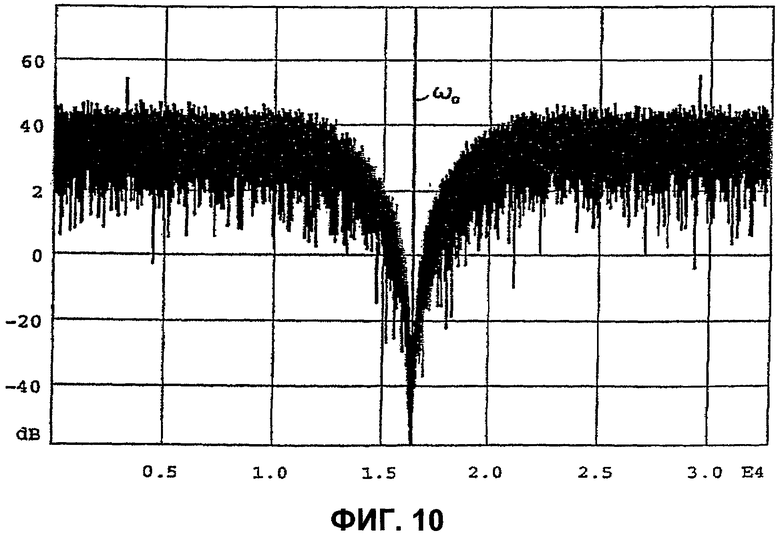
Фигура 10 показывает частотный спектр согласно фигуре 8 со статистическим округлением и
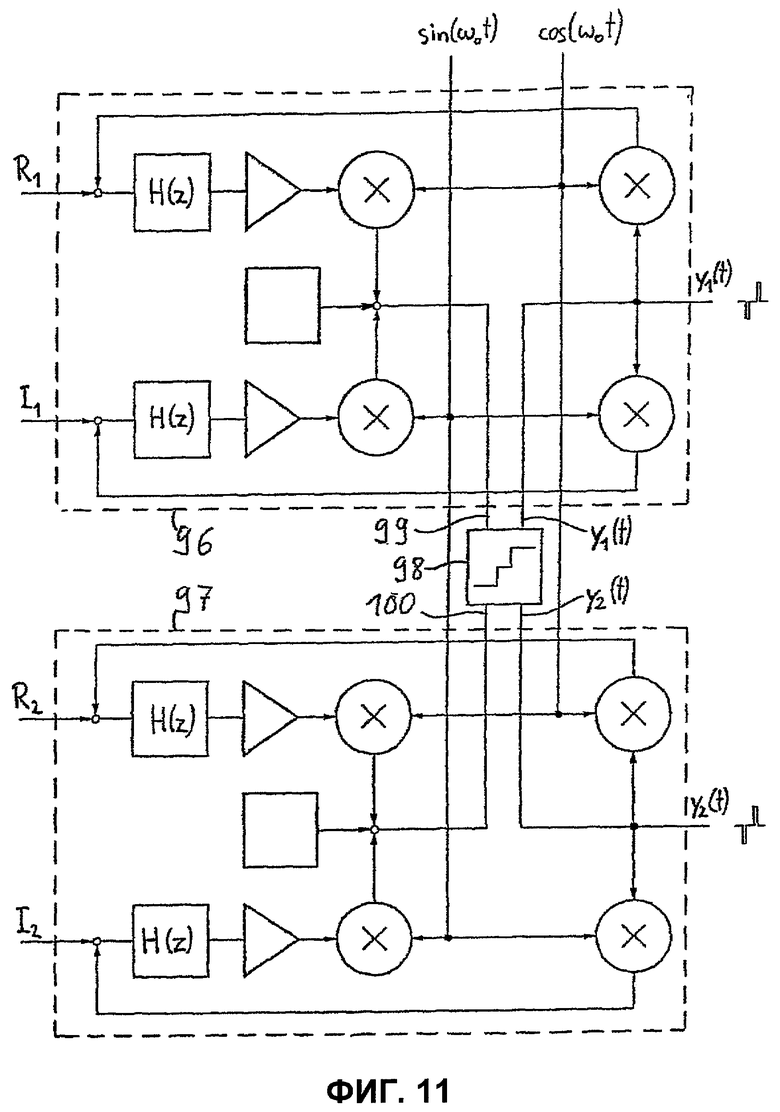
Фигура 11 показывает структурную схему двумерного импульсного модулятора.
Фигура 1 показывает электронный блок 30 контроля/управления, имеющий усилитель 31 заряда, аналого-цифровой преобразователь 32, разделитель 33 сигналов, первый демодулятор 34, второй демодулятор 35, блок 36 управления, двумерный импульсный модулятор 37, первый и второй преобразователи 38, 39 силового импульса и с первого по четвертый электроды подачи силы с 401 по 404.
Структура, образованная компонентами позиций с 31 по 37, представляет собой по меньшей мере один из двух контуров управления: первого - для установки амплитуд/частот возбуждающих колебаний, второго - для установки амплитуд/частот считываемых колебаний.
Как показывает фигура 1, блок согласно изобретению содержит лишь один аналого-цифровой преобразователь 32 и совсем не содержит цифроаналоговых преобразователей. Цифроаналоговые преобразователи в данном случае заменены двумерным импульсным модулятором 37 и двумя преобразователями силовых импульсов 38, 39.
Способ работы электронного блока контроля/управления согласно изобретению пояснен более подробно в нижеследующем описании.
Для установки значений амплитуд/частот возбуждающих/считываемых колебаний резонатора 2 двумерный импульсный модулятор 37 вырабатывает первый и второй троично квантованные выходной сигналы S1, S2, причем первый троично квантованный сигнал S1 преобразовывают в блоке 38 силового импульсного преобразователя в силовые импульсные сигналы (импульсы напряжения) S3 и S4. Аналогичным образом второй троично квантованный сигнал S2 преобразовывают во втором блоке 39 силового импульсного преобразователя в силовые импульсные сигналы (импульсы напряжения) S5, S6. Троично квантованные сигналы S1, S2 предпочтительно должны принимать значения 1, 0 и -1.
Если, например, сигнал S1 имеет значение +1, то первый блок силового импульсного преобразователя, используя сигнал S1, вырабатывает два силовых импульсных сигнала S3 и S4, которые вызывают появление силового импульса. Импульсные сигналы S3, S4 порождают электромагнитное поле между вторым и четвертым силовыми передающими электродами 402, 404 и между силовыми передающими электродами 402, 404 и резонатором 2, а эти электромагнитные поля приводят к появлению импульсов силы. Если значение сигнала S1 равно -1, то силовые импульсные сигналы S3 и S4 вырабатываются таким образом, что силовые линии результирующего электромагнитного поля имеют направление, противоположное предыдущему случаю при S1=1. Если значение сигнала S1 равно нулю, электромагнитное поле между вторым и четвертым силовыми передающими электродами 402, 404 или между силовыми передающими электродами 402, 404 и резонатором 2 отсутствует.
Таким образом, в данном примере ко второму и четвертому силовым передающим электродам 402, 404 прикладываются напряжения в соответствии с нижеследующей таблицей:
Аналогичные рассуждения применимы ко второму троично квантованному сигналу S2, который преобразуют во втором блоке 39 силового импульсного преобразователя в пятый и шестой силовые импульсные сигналы S5 и S6, которые в свою очередь прикладывают к первому и третьему силовым передающим электродам 401, 403. В рассматриваемом примере параметры возбуждающих колебаний устанавливают и ими управляют через силовые передающие электроды 402, 404, а параметры колебаний считывания устанавливают и управляют ими через силовые передающие электроды 401, 403.
В дополнение к возбуждению резонатора 2 появление электрического поля на электродах 401, 404 приводит также к появлению электрического заряда, перетекающего на подвижный центральный электрод. Этот заряд измеряют с помощью усилителя 31 заряда, а соответствующий аналоговый выходной сигнал S7 преобразовывают в аналого-цифровом преобразователе 32 в соответствующий цифровой сигнал S8, из которого разделитель 33 сигналов вырабатывает первый цифровой сигнал чтения S10. Так как заряд, перетекающий на центральный электрод, зависит от емкостей силовых передающих электродов 401, 404, к которым в это время приложено электрическое поле, количество перетекающего заряда является мерой амплитуд/частот/других параметров возбуждающих/считываемых колебаний резонатора 2. Мгновенное значение перемещения/изменения перемещения резонатора 2 может быть таким образом восстановлено с помощью разделителя 33 сигналов как функция текущих/предыдущих значений выходных сигналов от троично квантованных выходных сигналов S1, S2.
Двумерный импульсный модулятор 37 разработан таким образом, что троично квантованные выходные сигналы S1 и S2 никогда не изменяются одновременно, так как заряд, перетекающий на центральный электрод, измеряется в виде суммы. Иначе говоря, перемещения зарядов, обусловленные суперпозицией двух электрических полей, могут быть измерены только как единая сущность, то есть невозможно сопоставить части перемещенного заряда с конкретным электрическим полем. Дополнительная связь между троично квантованными выходными сигналами S1 и S2 тогда делает возможным получить однозначное соответствие между перетекающим зарядом и определенным электрическим полем или таким образом возможно точно различать возбуждающие и считываемые колебания. Вытекающее из этого условие состоит в утверждении, что лишь один из двух сигналов S1 и S2 может принимать значение, отличное от нуля в каждый данный момент времени.
Первый цифровой сигнал S9 считывания демодулируют первым демодулятором 34 в действительную часть S11 и в мнимую часть S12. Аналогично этому второй сигнал S10 считывания демодулируют вторым демодулятором 35 в действительную часть S13 и в мнимую часть S14. В качестве примера первый цифровой сигнал S9 считывания содержит информацию о возбуждающих колебаниях и второй цифровой сигнал считывания S10 содержит информацию о возбуждающих колебаниях. Действительная и мнимая части S11... S14 первого и второго сигналов S9, S10 считывания передают в систему 36 управления, которая вырабатывает сигналы S15... S18 возбуждения/компенсации как функции этих сигналов. В качестве примера сигнал S15 представляет собой действительную часть цифрового сигнала возбуждения/компенсации для колебаний возбуждения, а сигнал S16 представляет собой его мнимую часть. И, наоборот, сигнал S17 представляет собой действительную часть цифрового сигнала возбуждения/компенсации для колебаний считывания, а сигнал S18 представляет его мнимую часть.
Цифровые сигналы возбуждения/компенсации S15... S18 подают на двумерный импульсный модулятор 37, который использует их для генерации троично квантованных выходных сигналов S1, S2.
Фигура 3 представляет собой структурную схему импульсного модулятора согласно изобретению в комплексной форме. Комплексный входной сигнал x(t) имеет действительную и мнимую части, представленные Фировыми значениями. Комплексный сигнал 52 обратной связи вычитают из комплексного входного сигнала x(t) в блоке 51 вычитания, причем разность этих двух комплексных чисел представляет собой ошибку управления. Далее, выходное (также комплексное) значение элемента 53 задержки прибавляют к этой разности в блоке 51 вычитания. Выходное значение элемента 53 задержки передают через сигнальную линию 54 в блок 51 вычитания. Элемент 53 задержки вместе с сигнальной линией 54 образует блок комплексного интегратора, интегрирующий комплексную ошибку управления, то есть разницу между входным сигналом и сигналом обратной связи. Проинтегрированный сигнал 55 усиливают в блоке 56 усилителя, а усиленный сигнал 57 подают на первый блок 58 умножения, где усиленный сигнал 57 умножается на комплексный примесный сигнал  c целью таким образом получить сигнал 59, смешанный с повышением частоты с частотой ω0. Блок 60 определяет действительную часть комплексного смешанного сигнала 59, а действительную часть 61, полученную таким путем, подают на квантователь 62.
c целью таким образом получить сигнал 59, смешанный с повышением частоты с частотой ω0. Блок 60 определяет действительную часть комплексного смешанного сигнала 59, а действительную часть 61, полученную таким путем, подают на квантователь 62.
В варианте конструкции, изображенном на фигуре 3, квантователь 62 реализован в виде троичного квантователя, преобразующего входной сигнал в три возможных значения -1, 0, +1 импульсного сигнала, при помощи компараторов. Квантованный импульсный сигнал y(t), полученный таким образом, может быть считан с выхода квантователя 62. Блок 63 обратной связи, который может быть выполнен в виде второго блока умножения, использует импульсный сигнал y(t) для выработки сигнала (52) обратной связи. Действительную часть импульсного сигнала y(t) умножают во втором блоке умножения на комплексно-сопряженный смешивающий сигнал  для получения комплексного сигнала 52 обратной связи. Комплексный сигнал 52 обратной связи, полученный путем умножения действительного числа на комплексное число, подают на блок 51 вычитания на входе устройства.
для получения комплексного сигнала 52 обратной связи. Комплексный сигнал 52 обратной связи, полученный путем умножения действительного числа на комплексное число, подают на блок 51 вычитания на входе устройства.
Конфигурация функциональных узлов, показанная на фигуре 3, может быть реализована при помощи сигнального процессора (DSP) или с помощью оборудования, специально разработанного для данной цели. Цифровая обработка сигнала в этом случае может быть выполнена на частоте выборки ωA, величина которой значительно выше частоты ω0 комплексного смесительного сигнала. Например, величина ωA может быть установлена от 2 до 1000 раз выше, чем величина ω0.
Фигура 4 еще раз показывает импульсный модулятор, ранее показанный на фигуре 3, но в этом случае цепи синфазного сигнала и квадратурного сигнала разделены. Верхняя часть фигуры 4 показывает цепь 64 синфазного сигнала, передающую действительную часть R входного сигнала x(t). Нижняя часть фигуры 4 показывает цепь 65 квадратурного сигнала, передающую мнимую часть 1 входного сигнала. Действительная часть ошибки управления определяется узлом 66 сложения в цепи синфазного сигнала как разность между действительной частью R входного сигнала и действительной частью 67 сигнала обратной связи. Значение интегратора, которое сохранялось в элементе 68 задержки, добавляется к указанной ошибке управления и результат направляется по сигнальной линии 69 в узел 66 сложения. Совместно с сигнальной линией 69 элемент 68 задержки образует интегратор с передаточной функцией  . Добавление действительной части ошибки управления к указанному выше значению интегратора формирует новое значение интегратора, которое вновь запоминается в элементе 68 задержки. Интегрированный сигнал 70 в цепи синфазного сигнала масштабируется с коэффициентом "а" усилителем 71, а усиленный сигнал 72 передают на первый умножитель 73. Первый умножитель 73 умножает действительный усиленный сигнал 72 на сигнал cos(ω0t), то есть на действительную часть . Первый умножитель 73 вырабатывает произведение R·cos(ω0t), которое передают как сигнал 74 на сумматор 75.
. Добавление действительной части ошибки управления к указанному выше значению интегратора формирует новое значение интегратора, которое вновь запоминается в элементе 68 задержки. Интегрированный сигнал 70 в цепи синфазного сигнала масштабируется с коэффициентом "а" усилителем 71, а усиленный сигнал 72 передают на первый умножитель 73. Первый умножитель 73 умножает действительный усиленный сигнал 72 на сигнал cos(ω0t), то есть на действительную часть . Первый умножитель 73 вырабатывает произведение R·cos(ω0t), которое передают как сигнал 74 на сумматор 75.
Цепь квадратурного сигнала 65 импульсного модулятора содержит узел 76 сложения, в котором вычисляется разность между мнимой частью I входного сигнала и мнимой частью 77 сигнала обратной связи. Эта разность, представляющая собой мнимую часть ошибки управления, добавляется к предыдущему состоянию элемента 78 задержки, выход которого подается по сигнальной цепи 79 на узел сложения 76. Новое значение, вычисленное как сумма предыдущего значения и мнимой части ошибки управления, записывается в элемент 78 задержки. Совместно с сигнальной линией 79 элемент 78 задержки образует интегратор с передаточной функцией  . На выходе этого интегратора образуется проинтегрированный сигнал 80, который затем масштабируется с коэффициентом "а" в усилителе 81. Полученный таким образом в цепи квадратурного сигнала усиленный сигнал 82 затем умножают на сигнал sin(ω0t) во втором умножителе 83. Таким образом получают произведение I·sin(ω0t), которое в виде сигнала 84 поступает на сумматор 75. Сумматор 75 складывает сигналы R·cos(ω0t) и R·sin(ω0t) и образует на выходе сигнал 85 вида R·cos(ω0t)+I·sin(ω0t). Однако сигнал 85 соответствует в точности действительной части смешанного сигнала, потому что комплексное умножение сигнала x(t) на дает:
. На выходе этого интегратора образуется проинтегрированный сигнал 80, который затем масштабируется с коэффициентом "а" в усилителе 81. Полученный таким образом в цепи квадратурного сигнала усиленный сигнал 82 затем умножают на сигнал sin(ω0t) во втором умножителе 83. Таким образом получают произведение I·sin(ω0t), которое в виде сигнала 84 поступает на сумматор 75. Сумматор 75 складывает сигналы R·cos(ω0t) и R·sin(ω0t) и образует на выходе сигнал 85 вида R·cos(ω0t)+I·sin(ω0t). Однако сигнал 85 соответствует в точности действительной части смешанного сигнала, потому что комплексное умножение сигнала x(t) на дает:
а действительная часть этого сигнала представляет собой R·cos(ω0t)+I·sin(ω0t). Сигнал 85 представляет собой таким образом действительную часть комплексного смешанного сигнала и в этом смысле соответствует сигналу 61, показанному на фигуре 3.
Цифровой действительный сигнал 85 подают на квантователь 86, преобразующий входной сигнал в квантованный импульсный сигнал y(t). Трехуровневый (троичный) квантователь, пример которого приведен на фиг.3 и 4, квантует входной сигнал в базисе y(t)∈{-1; 0; +1}. Для этого квантователь 86 имеет компараторы, непрерывно сравнивающие уровень сигнала 85 с заданными пороговыми уровнями. В зависимости от результата этого сравнения выходной сигнал y(t) устанавливается равным одному из значений -1; 0; +1. Вместо трехуровневого (троичного) квантования могут быть использованы другие желаемые виды квантования в зависимости от конкретного применения, например двухуровневое (двоичное) или многоуровневое квантование.
Действительную 67 и мнимую 77 части комплексного сигнала обратной связи получают из квантованного импульсного сигнала y(t). Для этого импульсный сигнал y(t) умножают на комплексно-сопряженный примесный сигнал  :
:

Действительная часть y(t)·cos(ω0t) комплексного сигнала обратной связи вырабатывается третьим умножителем 87, который умножает импульсный сигнал y(t) на cos(ω0t). Действительная часть 67 сигнала обратной связи таким образом образуется на выходе третьего умножителя 87 и передается на узел 66 сложения. Для получения мнимой части y(t)·sin(ω0t) комплексного сигнала обратной связи импульсный сигнал y(t) умножают на sin(ω0t) в четвертом умножителе 88. Мнимая часть 77 сигнала обратной связи образуется на выходе четвертого умножителя 88 и подается обратно на узел 76 суммирования.
В примерах реализации, показанных на фигурах 3 и 4, интеграторы устанавливают со стороны входа, причем они интегрируют ошибку управления между входным сигналом и сигналом обратной связи. Передаточная функция H(z) интегратора может быть записана в виде . Вместо интеграторов другие блоки преобразования с передаточными функциями H(z) могут быть использованы на стороне входа. Например, передаточные функции H(z) высокого порядка могут быть использованы, однако:
lim H(z)=∞
z→1.
Таким образом, передаточная функция H(z) должна стремиться к бесконечности, когда частота ω стремится к нулю (z→1). Дополнительные параметры функции H(z) могут быть использованы для оптимизации специфических характеристик модулятора (например, отношения сигнал/шум) или всей системы.
Фигура 5 показывает форму импульсного сигнала y(t), который может быть считан с выхода квантователя при использовании троичного квантования y(t)∈{-1; 0; +1}, которая была получена путем компьютерного моделирования. В данном случае действительная часть R комплексного входного сигнала установлена равной 0.3, а мнимая часть I входного сигнала установлена равной нулю. Таким образом, входной сигнал x(t) не изменяется во времени. Частота выборки ωA в пять раз выше частоты смесителя ω0/ωA=0.2. Тактовые импульсы частоты выборки ωA показаны на оси абсцисс и пронумерованы от 5000 до 5100. В течение каждого периода тактовых импульсов импульсный сигнал y(t) принимает одно из трех возможных значений -1; 0; +1. Значения y(t) для каждого из периодов тактовых импульсов отмечены по оси ординат.
Если произвести спектральный анализ (FFT) импульсного сигнала, показанного на фигуре 5, получим спектр, показанный на фигуре 6. Частоты спектральных компонент в произвольных единицах FFT показаны на оси абсцисс, а интенсивность сигнала показана в децибелах по оси ординат. В частотном распределении имеется пик на частоте ω0. Можно также заметить, что уровень шума в окрестности частоты ω0 значительно ниже, чем в остальной части спектра. В обычном сигма-дельта-модуляторе уровень шума значительно снижается на низких частотах, то есть в области частоты ω0. В случае импульсного модулятора согласно изобретению проинтегрированный и усиленный сигнал смешивается с повышением частоты с частотой ω0 путем комплексного умножения. Вследствие этого диапазон частот, где шум понижен, также смещен в сторону смесительной частоты ω0, тем самым обеспечивая шумовые характеристики, показанные на фигуре 6.
Импульсный модулятор согласно изобретению может быть использован для цифрового синтеза импульсного сигнала, когда главная спектральная компонента импульсного сигнала определяется смесительной частотой ω0. Фазовый угол получаемого импульсного сигнала может быть точно установлен путем установки отношения между действительной и мнимой частями входного сигнала, а это определяет стабильность фазы импульсного сигнала. При использовании импульсного модулятора согласно изобретению для синтеза частоты импульсный сигнал y(t) должен быть отфильтрован электрическим полосовым фильтром, полоса пропускания которого центрирована вокруг частоты ω0. Такой полосовой фильтр, изготовленный на базе, например, кварцевого или керамического фильтра, позволяет подавить частотные компоненты, удаленные от частоты ω0, где уровень шума высок. Таким образом, такой полосовой фильтр позволяет значительно улучшить отношение сигнал/шум.
Импульсный модулятор согласно изобретению подходит, между прочим, для возбуждения гармонических колебаний в электромеханических генераторах. В частности, электростатические силы, необходимые для возбуждения колебаний, могут быть получены с помощью троично квантованного импульсного сигнала, подаваемого на возбуждающие электроды микромеханического резонатора. Частоту ω0 импульсного сигнала y(t) в этом случае предпочтительно выбирать равной резонансной частоте микромеханического генератора. Если импульсный сигнал, показанный на фиг.5 и 6, используется для возбуждения гармонических колебаний в высококачественном генераторе (например, с добротностью порядка 104), резонансная частота которого соответствует частоте возбуждения ω0, то большая часть шума квантования фильтруется самим генератором. В частности, шум квантования на частотах, удаленных от резонансной частоты ω0, подавляется генератором. Отфильтрованный спектр, полученный при этом, показан на фигуре 7.
Некоторые значения отношений частот ω0/ωA приводят к тому, что шумовая компонента квантования в y(t) преобразуется в группу более или менее периодических функций. В качестве одного из примеров на фигуре 8 показан частотный спектр, полученный для отношения ω0/ωA=0.25. Группа спектральных линий 89, 90, 91 и т.д. видна наряду с пиком на частоте ω0. Причина появления таких спектральных линий состоит в том, что квантователь является нелинейным элементом в контуре управления, порождающим релаксационные колебания в контуре управления при некоторых соотношениях частот. Подобная реакция контура управления известна по обычным дельта-сигма-преобразователям.
Для предотвращения появления релаксационных колебаний линейность квантователя может быть улучшена добавлением шумового сигнала во входной сигнал квантователя. Равномерно по частоте распределенный шумовой сигнал предпочтительно использовать для этой цели. На фигуре 9 показана структурная схема соответствующим образом измененного модулятора. По сравнению со структурной схемой, показанной на фигуре 4, импульсный модулятор на фигуре 9 дополнительно имеет генератор 92 шума, порождающий шумовой сигнал 93. Кроме того, интеграторы, показанные на фигуре 4, здесь показаны в обобщенной форме как блоки 94 94, 95 преобразования сигнала с передаточной функцией H(z). Остальные компоненты фигуры 9 соответствуют компонентам фигуры 4. Шумовой сигнал 93 подают на сумматор 75, где он складывается с сигналами 74 и 84. Сигнал 85 на входе квантователя 86 поэтому содержит шумовую компоненту, что в конечном счете ведет к статистическому округлению процесса квантования. На фигуре 10 показан частотный спектр импульсного сигнала y(t) на выходе импульсного сигнала, модифицированного в соответствии с фигурой 9. Несмотря на то, что отношение частот ω0/ωA по-прежнему равно 0.25, релаксационных колебаний не наблюдается.
Импульсный модулятор согласно изобретению может быть использован, в частности, для электростатического возбуждения микромеханических генераторов. Для этой цели, в качестве примера, троично квантованный импульсный сигнал типа, показанного на фигуре 5, может быть подан на возбуждающие электроды микромеханического резонатора. Импульсный сигнал, показанный на фигуре 5, представляет собой синусоидальный частоты ω0. Импульсный сигнал такого типа может быть использован для возбуждения гармонических колебаний в микромеханическом резонаторе на частоте ω0, говоря точно, когда частота ω0 импульсного сигнала, по меньшей мере приблизительно, соответствует резонансной частоте генератора.
Резонаторы, способные колебаться в двух взаимно перпендикулярных направлениях y1 и у2, применяются в датчиках угловой скорости и Кориолисовых гироскопах. Двумерный импульсный модулятор, показанный на фигуре 11, может быть использован для электростатического возбуждения резонатора с двумя степенями свободы. Двумерный импульсный модулятор имеет первый импульсный модулятор 96, вырабатывающий импульсный сигнал y1(t) из комплексного входного сигнала R1, I1, и этот импульсный сигнал используется для возбуждения резонатора в направлении y1. Импульсный сигнал y2(t) вырабатывается из комплексного входного сигнала R2, I2 вторым импульсным модулятором 97 и этот импульсный сигнал используется для возбуждения колебаний резонатора в направлении y2. Оба импульсных модулятора, первый 96 и второй 97, выполнены в виде импульсного модулятора со статистическим округлением, как показано на фигуре 9. Описание конструкции и способа работы первого и второго импульсных модуляторов 96, 97 поэтому могут быть найдены в описании, относящемся к фигурам 4 и 9. Однако двумерный импульсный модулятор, показанный на фигуре 11, содержит двумерный квантователь 98, используемый в двух каналах, преобразует сигнал 99 первого импульсного модулятора 96 в квантованный импульсный сигнал y1(t) и сигнал 100 от второго импульсного модулятора 97 в квантованный импульсный сигнал y2(t). Использование двумерного квантователя 98, подключенного к двум каналам, делает возможным при квантовании сигналов 99 и 100 учитывать дополнительные факторы, существенные для микромеханического датчика. Одним из таких факторов, в качестве примера, является то, что каждый раз только один из каналов может вырабатывать импульс ненулевой амплитуды. Другим существенным фактором является то, что только один из выходных сигналов y1(t), y2(t) может изменяться в каждый данный момент времени. Указанные дополнительные факторы становятся важными, когда измеряют суммарные токи смещения, появляющиеся на электродах двойного резонатора, для того чтобы вычислить смещение резонатора. Дополнительные факторы делают возможным однозначно сопоставить ток смещения с одним из электродов. Это позволяет выполнить разделение сигналов, обусловленных смещением y1 и смещением y2 резонатора.
Все примеры реализации импульсного модулятора согласно изобретению, приведенные выше, могут быть использованы для реализации способа согласно изобретению. Если необходимо, они могут быть скомбинированы один с другим. Импульсный модулятор (двумерный), показанный на фигуре 11, может быть использован непосредственно, а также возможно использовать комбинации двух одномерных импульсных модуляторов. Также возможно распределение дополнительного шумового сигнала.
Изобретение относится к Кориолисовым или вибрационным гироскопам. При работе Кориолисова гироскопа (1) вырабатывают цифровые сигналы считывания, представляющие собой измерения текущих значений амплитуды/частоты возбуждающих/считываемых колебаний резонатора (2) Кориолисова гироскопа (1). К резонатору (2) прикладывают силовые сигналы, вырабатываемые в функции от цифровых сигналов считывания таким образом, что возбуждающие/считываемые колебания принимают определенную амплитуду/частоту. Силовые сигналы (S3-S6) вырабатывают из квантованных выходных сигналов (S1, S2) импульсного модулятора (37), на который подают цифровые сигналы (S15-S18) возбуждения/компенсации, вычисленные из цифровых сигналов (S9, S10) считывания. Техническим результатом является уменьшение количества электронных компонентов. 3 н. и 5 з.п. ф-лы, 11 ил.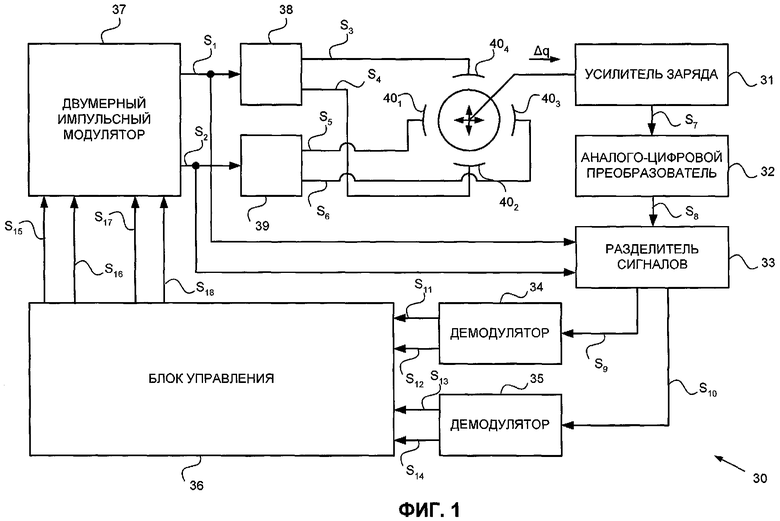
| US 5992233 А, 30.11.1999 | |||
| US 6298709 В1, 09.10.2001 | |||
| Устройство для измельчения материалов | 1982 |
|
SU1072893A1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |

