Настоящее изобретение относится к Кориолисовым гироскопам, конструкция которых включает в себя подложку, по меньшей мере четыре отдельных структуры и упругие элементы, которые соединяют отдельные структуры с подложкой и между собой, а также имеет датчики силы и ответвители. Конструкции присущи мода возбуждения, возбуждаемая датчиками силы, и мода детектирования, которая может быть измерена ответвителями. Мода детектирования возбуждается благодаря Кориолисовым силам при возбужденной моде возбуждения во время вращения Кориолисова гироскопа вокруг оси чувствительности.
Кориолисовы гироскопы (Кориолисовы вибрационные гироскопы) можно разделить на два класса в зависимости от используемых мод колебаний.
1. С колебаниями формы и изгибными колебаниями (например, HRG: "гироскопы с полусферическим резонатором"), гироскопы с кольцевым резонатором, стержневые).
2. Пружинно-массовая система (например, Lin-Rot, Rot-Rot, Lin-Lin, где Lin-Rot означает, что мода возбуждения включают в себя линейные перемещения ("Lin"), a мода детектирования включает в себя вращательные движения ("Rot"). Rot-Rot и Lin-Lin определены соответствующим образом.)
Эти два класса имеют характерные преимущества и недостатки с точки зрения чувствительности к вибрации и ускорению.
1. Колебания формы и изгибные колебания.
Преимущества: Обычно используют внешне замкнутые полезные моды (моду возбуждения и моду детектирования), другими словами эти моды не передают наружу никаких сил и моментов. Поэтому они не могут быть приведены в движение ни линейными ускорениями, ни вибрацией (с линейными и/или вращательными составляющими). Термин "внешний" относится к "окружающему пространству" подложки (силы или моменты могут оказывать местное воздействие непосредственно на подложку в результате перемещения элементов массы или отдельных структур, но они в целом компенсируют друг друга). Подложку устанавливают на корпусе или изделии из керамики (в общем, на "основании"), например, приклеивают или припаивают. Замкнутые моды не передают на это основание никаких усилий или моментов. Однако это справедливо только в том случае, если не должны быть учтены допуски на изготовление.
Недостатки: Для наиболее известных структур необходима гибкая подвеска (например, кольцо, стержень; исключение составляет лишь так называемый HRG (гироскоп с полусферическим резонатором), однако его "естественная трехмерная" форма требует сложных производственных процессов). Таким образом, возникновение ускорений и вибраций может привести к значительному смещению структур, что в свою очередь, вызывает появление ошибок во многих датчиках силы (например, электростатических датчиках силы) и ответвителях (например, ответвителях с емкостной связью). Кроме того, квадратурная компенсация, т.е. "уравновешивание" структуры с помощью исполнительного элемента, фактически невозможна, поскольку необходимые силы достаточно велики.
2. Пружинно-массовая система.
Преимущества: B.Greiff, В.Boxenhorn, Т.King and L.Niles, "Silicon Monolithic Micromechanical Gyroscope", Tech. Digest, 6th Int. Conf. on Solid-State Sensors and Actuators (Transducers '91), San Francisco, CA, USA, июнь 1991, стр.966-968 или J.Bernstein, S.Cho, A.T.King, A.Kourepins, P.Maciel and M.Weinberg, "A Micromachined Comb-Drive Tuning Fork Rate Gyroscope", Proc. IEEE Micro Electromechanical Systems Workshop (MEMS 93), Fort Lauderdale, FL, USA, февраль 1993, стр.143-148 или патент Германии №196 41 284 С1 раскрывают структуры, резонансные частоты полезных мод которых значительно меньше резонансной частоты других мод, которые могут быть возбуждены ускорениями и/или вибрациями и приводить к возникновению значительного сигнала ошибки. Моды, которые вызывают значительный сигнал ошибки, представляют собой, в частности, моды, которые влияют на сигнал измерения перемещения при детектировании. Моды, которые влияют на измерение перемещения при возбуждении, обычно являются менее вредными.
Недостатки: Вибрации, а также зачастую и линейные ускорения также могут возбуждать одну или обе полезных моды, а следовательно, они могут вызывать сигналы ошибки.
В документе ЕР 1515119 А1 приведено описание датчиков скорости вращения, снабженных двумя парами отдельных датчиков и выполненных с возможностью совершения колебания в противофазе по линейному закону и при наличии линейной моды детектирования. В документе WO 95/34798 описан Кориолисов гироскоп, имеющий две колеблющиеся массы и моду детектирования, которая основана на крутильном колебании двух колеблющихся масс.
Цель изобретения состоит в обеспечении датчика скорости вращения на основе систем пружин и масс, который обладает меньшей чувствительностью к ускорениям и вибрациям.
Эта задача решена посредством Кориолисова гироскопа, отличительные признаки которого приведены в п.1 формулы изобретения. Предложены структуры такого класса, обе полезные моды которых (мода возбуждения и мода детектирования) являются замкнутыми. Полезные моды не могут быть возбуждены ускорениями и вибрациями, и сигнал ошибки отсутствует. Однако, это справедливо только в том случае, если не должны быть учтены никакие допуски на изготовление. Кориолисов гироскоп содержит подложку, отдельные структуры (по меньшей мере две) и упругие элементы. Некоторые из отдельных структур соединены с подложкой, а некоторые из них связаны друг с другом посредством упругих элементов, в результате чего система имеет по меньшей мере две замкнутых собственных моды, одна из которых может быть использована в качестве моды возбуждения, а вторая в качестве моды детектирования. Мода возбуждения может быть возбуждена датчиками силы. При вращении Кориолисова гироскопа вокруг своей оси чувствительности возбуждение колебаний приводит к возникновению Кориолисовых сил, которые, в свою очередь, возбуждают моду детектирования. Перемещение моды детектирования может быть измерено с помощью ответвителей. Амплитуда результирующего колебания может быть использована в качестве измеримой переменной.
Согласно предпочтительному варианту реализации по п.2 формулы изобретения, Кориолисова сила может быть восстановлена благодаря датчикам силы, что обеспечивает лучшую оценку вследствие отсутствия смещения отдельных структур. Для этой цели необходимы датчики силы, обеспечивающие приложение моментов и сил к моде детектирования. В этом случае амплитуда восстанавливающего момента или восстанавливающей силы будет служить мерой угловой скорости.
Согласно п.3 формулы изобретения, перемещение моды возбуждения может быть легко измерено с помощью ответвителей.
Предложены исполнительные элементы для квадратурной компенсации по п.4 формулы изобретения и/или исполнительные элементы для регулировки частоты по п.5 формулы изобретения, которые выполнены с возможностью их регулировки или управления. Для высокоточных микромеханических Кориолисовых гироскопов, которые производятся посредством микротехнологических процессов, предпочтительно выбирать квадратурную компенсацию и регулировку частоты. Хотя и квадратурная компенсация, и регулировка частоты могут быть получены методом лазерной подгонки, однако этот процесс очень дорогостоящий. Исполнительные элементы обладают тем преимуществом, что сам процесс регулирования стоит очень недорого.
В варианте реализации по п.6 формулы изобретения имеются структуры, в которых резонансные частоты полезных колебаний могут быть значительно меньше резонансных частот мод, которые могут быть возбуждены ускорениями и/или колебаниями и вызывают сигнал значительной ошибки. Вследствие этого, ошибки, зависящие от вибрации, далее уменьшают. Эти структуры сочетают в себе преимущества класса "колебаний формы и изгибных колебаний", а также класса "пружинно-массовой системы", и поэтому позволяют устранить свои соответствующие недостатки.
Ниже приведено описание двух случаев, которые будут использованы для определения преимуществ.
1-й случай (преимущество замкнутой моды детектирования)
Возбуждение моды детектирования осуществляют с помощью линейных колебаний или акустическим способом точно на частоте, при которой управляют модой возбуждения (обычно, это резонансная частота моды возбуждения, а при настроенных резонансных частотах это также и мода детектирования). Амплитуда действующего ускорения обозначена как а0. Далее в тексте она будет выражена в единицах "g". Для упрощения предполагают, что фазы возмущающей силы и Кориолисовой силы одинаковы.
1-й вариант: Мода детектирования представляет собой "простые" (не в противофазе) линейные колебания. В этом случае ускорение нельзя отличить от Кориолисова ускорения, и может быть выдан сигнал ошибки, обозначаемый Ωv.
При резонансной частоте f0=ω0/(2π)=10 кГц и амплитуде моды возбуждения 10 мкм, в результате может быть получено:

2-й вариант: мода детектирования представляет собой простые крутильные колебания. Неуравновешенность масс может быть выражена в виде k2=1%. При этом сигнал ошибки приблизительно соответствует выражению:

3-й вариант: мода детектирования соответствует дифференциальной моде двух связанных крутильных колебаний (замкнутая мода). При всех других условиях, аналогичных условиям для варианта 2, можно предположить, что неуравновешенность масс примерно в 100 раз меньше (k3=100ррm). При этом сигнал ошибки приблизительно соответствует выражению:

2-й случай (преимущество объекта изобретения по п.6 формулы)
Составляющие вращательного ускорения колебаний рассматривают при частотах, которые значительно ниже резонансных частот, которые рассмотрены ниже.
Вариант 1: мода детектирования соответствует двум крутильным колебаниям в противофазе. Резонансная частота ωgl1 колебаний синфазного режима двух связанных крутильных колебаний меньше резонансной частоты ω2 противофазного режима двух связанных крутильных колебаний (т.е. моды детектирования), например:

Вариант 2: мода детектирования соответствует двум крутильным колебаниям в противофазе. Резонансная частота ωgl2 колебаний синфазного режима двух связанных крутильных колебаний больше резонансной частоты ω2 противофазного режима двух связанных крутильных колебаний (т.е. моды детектирования), например:
При описанном возбуждении, отношение результирующих отклонений колебаний синфазных режимов варианта 1 и варианта 2 может быть представлено в виде:
Так как ошибки, вызванные возбуждением колебаний синфазного режима пропорциональны отклонению синфазного режима или квадрату отклонения, то ошибки в варианте 2 могут быть уменьшены в 9-81 раз.
Согласно п.7 формулы изобретения, структуры могут быть выполнены таким образом, что резонансные частоты полезных мод значительно меньше резонансных частот всех других мод, а ошибки при возбуждении этих мод уменьшены.
В примерах двое связанных линейных колебаний в противофазе друг относительно друга в результате взяты в качестве замкнутой моды возбуждения, двое связанных крутильных колебаний в противофазе взяты в качестве замкнутой моды детектирования (Lin-Rot), а двое связанных крутильных колебаний в противофазе взяты в качестве замкнутой моды возбуждения, а двое связанных крутильных колебаний в противофазе выбраны в качестве замкнутой моды детектирования (Rot-Rot). Другие примеры содержат три замкнутых собственных моды, одна из которых, например, может быть использована в качестве моды возбуждения, а две другие могут быть использованы в качестве моды детектирования при вращениях вокруг разных осей чувствительности.
Согласно п.9 формулы изобретения, в одном предпочтительном варианте его реализации, в котором колебания совершаются параллельно поверхности подложки, Кориолисов гироскоп может быть изготовлен простым способом, поскольку отсутствует необходимость выявления каких-либо перемещений или их совершения под прямым углом к поверхности подложки.
Согласно п.10 формулы изобретения, в предпочтительном варианте реализации отдельные структуры могут быть выполнены в виде разъединенных структур, которые содержат модуль возбуждения и эталонную массу. Это позволяет получить следующие преимущества:
1. Модуль возбуждения направлен приблизительно идеально. Любой угол отклонения между приводом для модуля возбуждения и модой возбуждения не вызывает никакого возбуждения моды детектирования, а следовательно, и никакого сигнала ошибки.
2. Смещение моды детектирования почти не вызывает никаких изменений развиваемой приводом силы, приложенной к модулю возбуждения.
3. Таким образом, это означает, что нежелательные взаимодействия между возбуждающей силой на модуль возбуждения и перемещением моды детектирования в значительной степени подавлены.
Согласно п.11 формулы изобретения предложены двусторонние разъединенные структуры, содержащие модуль возбуждения, элемент, основанный на эффекте Кориолиса, и модуль регистрации, что дополнительно приводит к "разгрузке чувствительного элемента", т.е. наличие какого-либо угла отклонения между ответвителем модуля регистрации и перемещением модуля возбуждения почти не приводит к сигналу ошибки.
Согласно п.14 в предпочтительном варианте реализации изобретения имеются четыре отдельные структуры, с помощью которых простым способом могут быть созданы замкнутые полезные моды.
Варианты реализации Кориолисовых гироскопов согласно изобретению будут приведены далее со ссылками на чертежи.
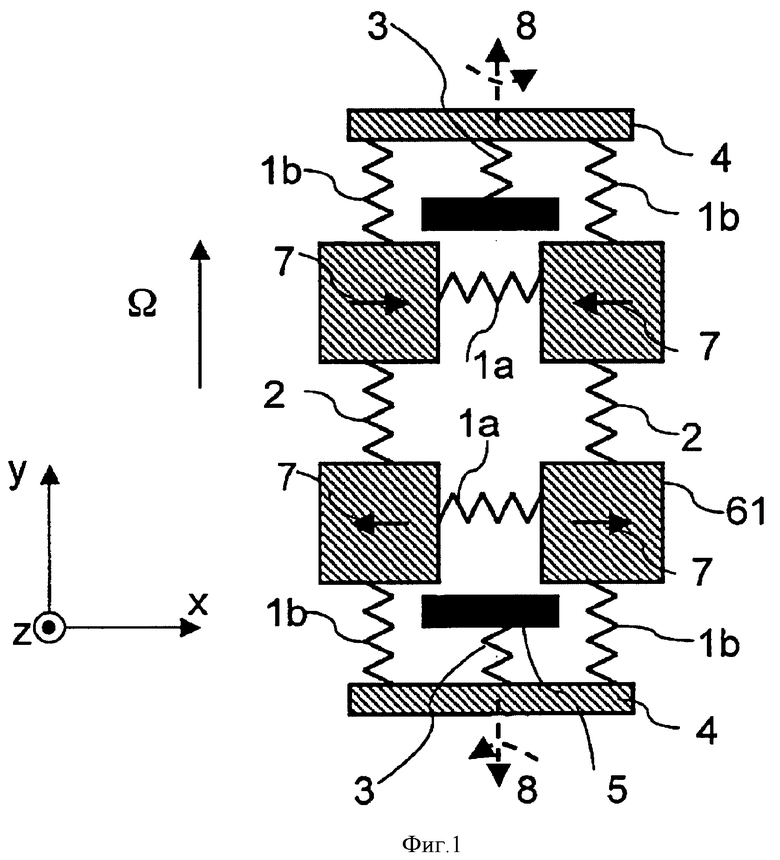
На фиг.1 схематически представлен первый пример осуществления Кориолисова гироскопа на основе замкнутой пружинно-массовой системы, линейные колебания которого выбраны в качестве моды возбуждения, а крутильные колебания - в качестве моды детектирования.
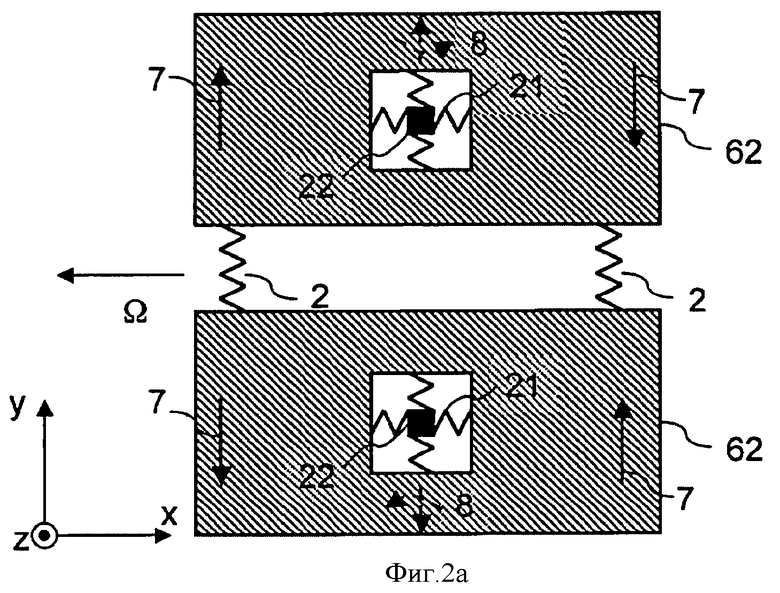
На фиг.2а схематически представлен Кориолисова гироскопа на основе замкнутой пружинно-массовой системы, крутильные колебания которого выбраны в качестве моды возбуждения и моды детектирования по первому варианту.
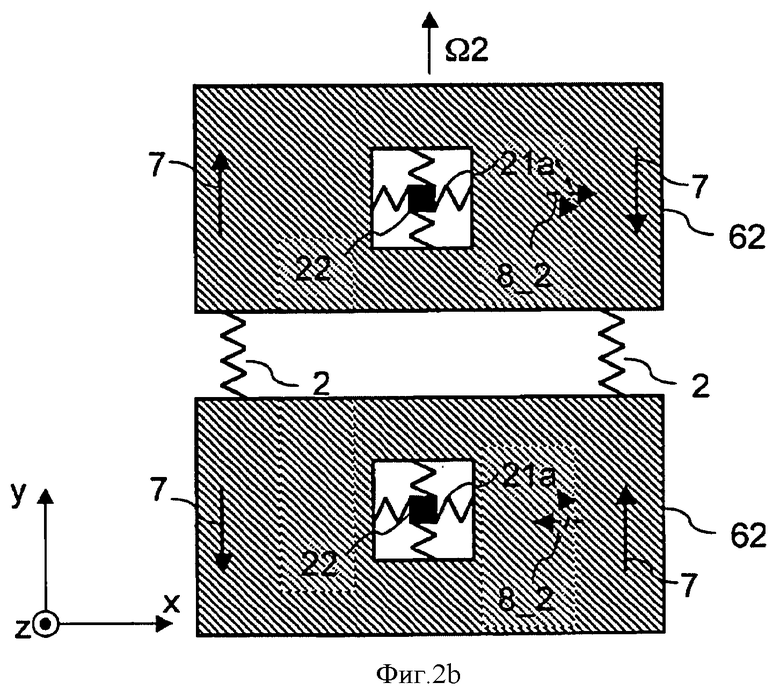
На фиг.2b схематически представлен Кориолисова гироскопа на основе замкнутой пружинно-массовой системы, крутильные колебания которого выбраны в качестве моды возбуждения и моды детектирования по второму варианту.
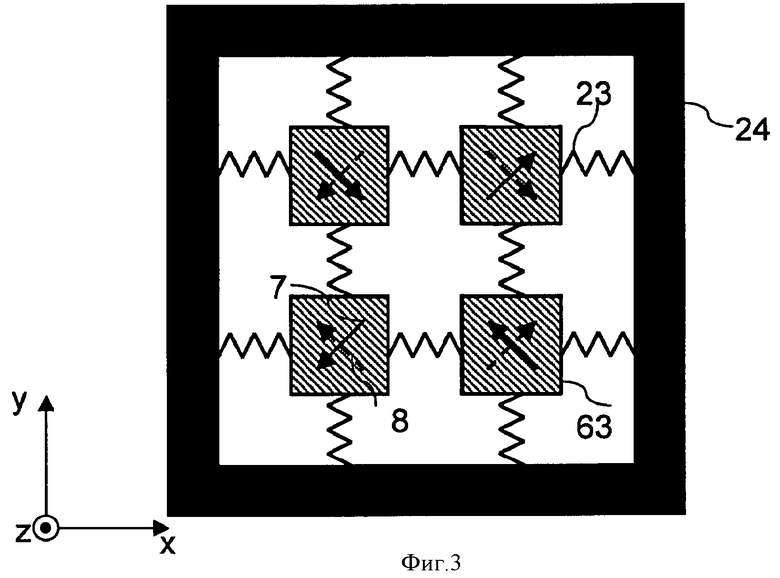
На фиг.3 схематически представлен второй пример осуществления Кориолисова гироскопа на основе замкнутой пружинно-массовой системы, линейные колебания которого выбраны в качестве моды возбуждения и моды детектирования,
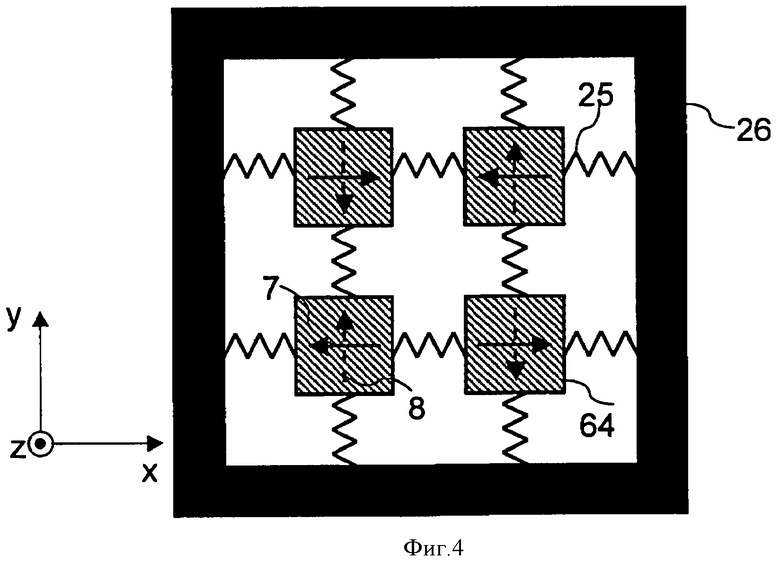
На фиг.4 схематически представлен третий пример осуществления Кориолисова гироскопа на основе замкнутой пружинно-массовой системы, линейные колебания которого выбраны в качестве моды возбуждения и моды детектирования,
На фиг.5 схематически представлен вид сверху первого варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
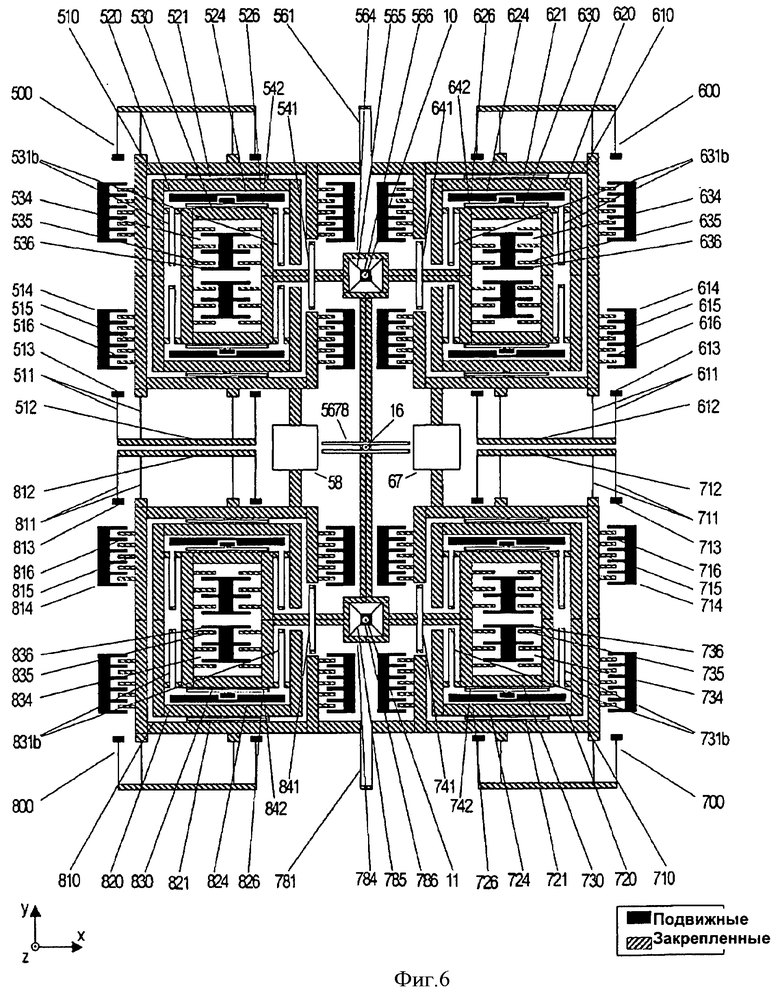
На фиг.6 схематически представлен вид сверху второго варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
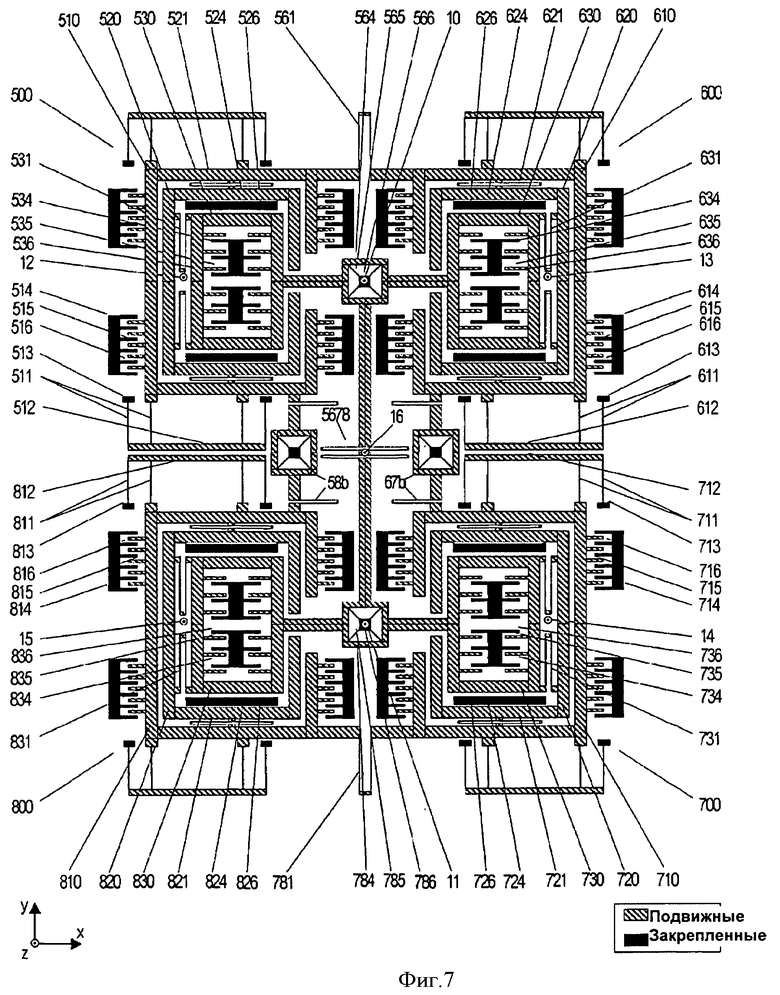
На фиг.7 схематически представлен вид сверху третьего варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
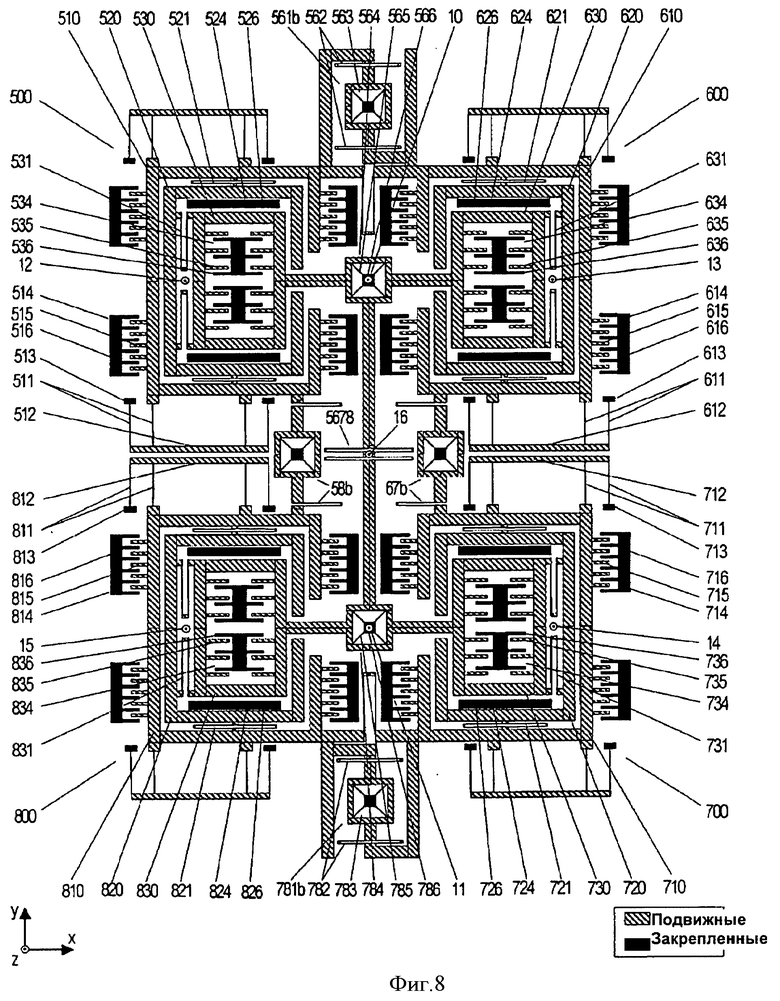
На фиг.8 схематически представлен вид сверху четвертого варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
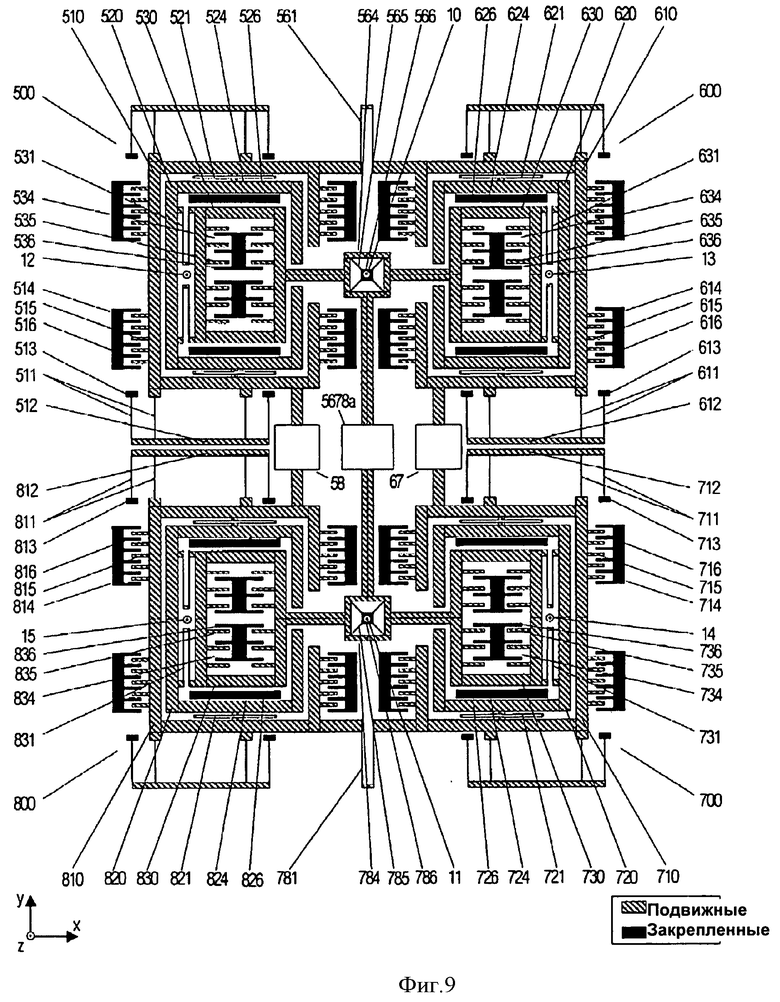
На фиг.9 схематически представлен вид сверху пятого варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
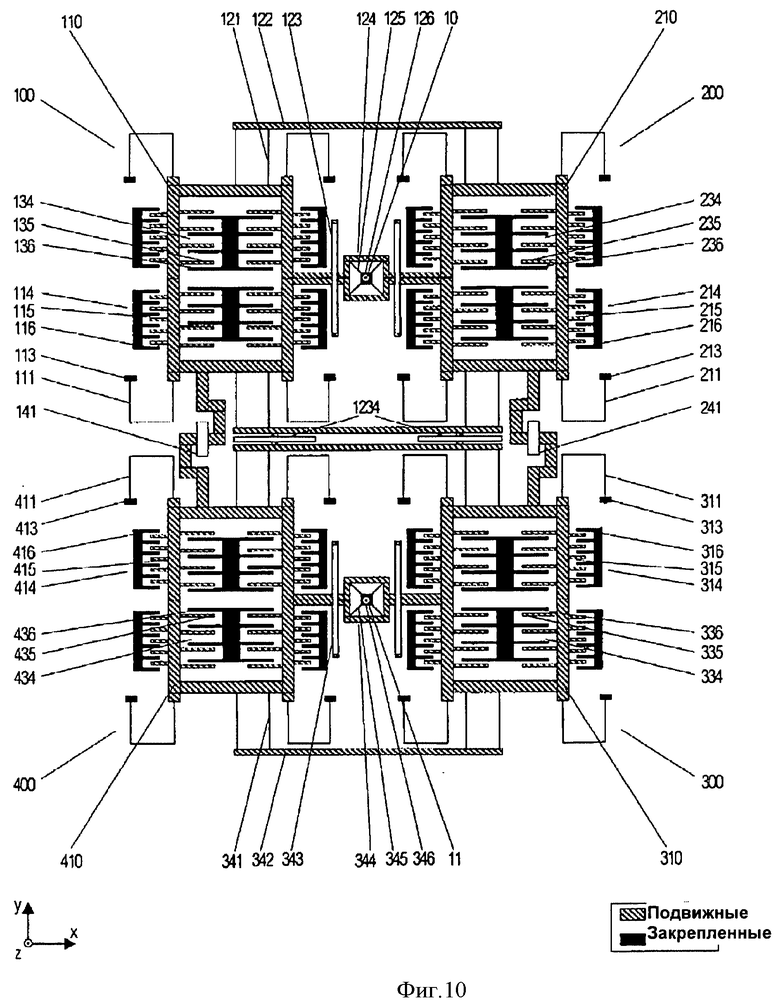
На фиг.10 схематически представлен вид сверху шестого варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
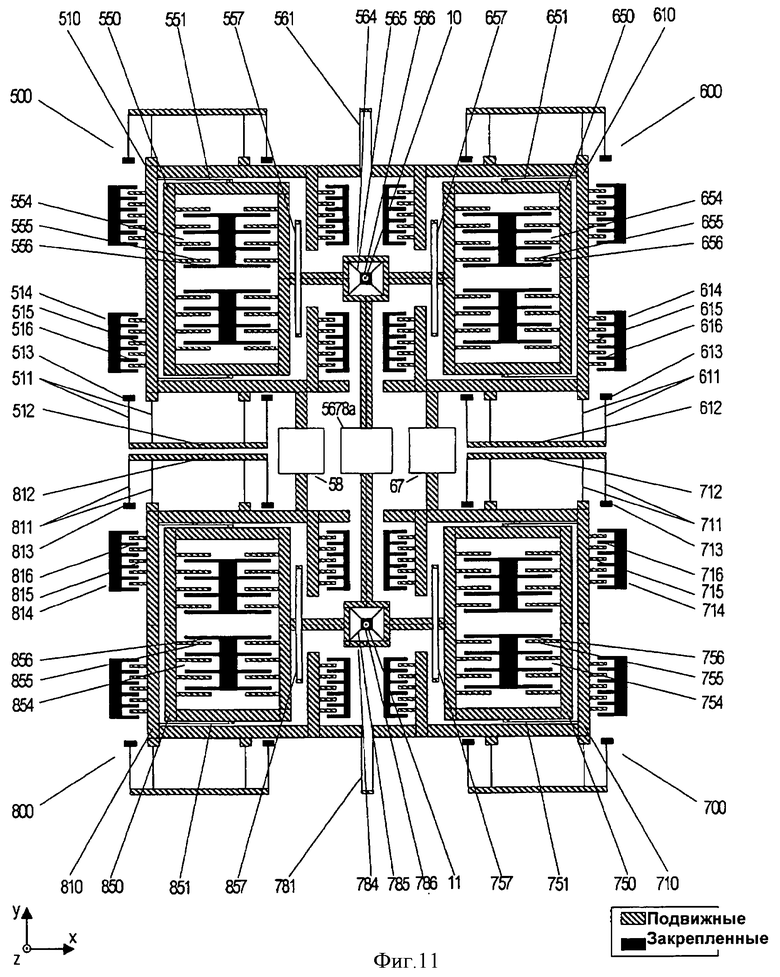
На фиг.11 схематически представлен вид сверху седьмого варианта четвертого примера осуществления Кориолисова гироскопа согласно изобретению.
В некоторых случаях для ясности одним и тем же элементам на чертежах присвоены разные номера позиций. Однако, исходя из описываемых симметрий и идентичных чертежей, специалист в данной области техники может сделать вывод о том, какие элементы на чертежах обозначены какими номерами позиций.
На фиг.1-4 все элементы, которые выделены светло-серым цветом, представляют собой подвижные "элементы массы" в качестве отдельных структур, которые в первом приближении можно рассматривать как бесконечно жесткие. Участки, выделенные темно-серым (черным) цветом, практически не могут перемещаться относительно подложки.
На фиг.1 схематично представлен Кориолисов гироскоп на основе замкнутой пружинно-массовой системы согласно первому примеру осуществления, содержащий четыре первых элемента 61 массы, которые соединены между собой через первые соединительные упругие относительно х элементы 1а и через соединительные упругие элементы 2, а также соединены через вторые соединительные упругие относительно х элементы 1b, сопрягающие элементы 4 и первые упругие элементы 3 подложки с подложкой 5 (в этом случае показана только через крепление). Два связанных линейных колебания элементов 61 массы, находящиеся в противофазе друг относительно друга, использованы в качестве моды 7 возбуждения. При вращении Кориолисова гироскопа вокруг оси Ω чувствительности возбуждается мода 8 детектирования, что может быть представлено в виде двух связанных крутильных колебаний в противофазе вокруг оси y, которая параллельна оси Ω чувствительности и расположена под прямым углом к оси х (Lin-Rot). Соединительные упругие относительно х элементы 1а, 1b выполнены податливыми в направлении х, но жесткими во всех других направлениях, а соединительные упругие элементы 2 могут быть выполнены податливыми одинаково во всех направлениях, т.е. податливыми при всех нагрузках. Первые упругие элементы 3 подложки выполнены податливыми при вращении вокруг оси у, но жесткими во всех других направлениях. В этом Кориолисове гироскопе полезные колебания (т.е. моды 7 возбуждения и моды 8 детектирования) представляют собой замкнутые колебания. По существу, мода возбуждения и мода детектирования могут быть также взаимозаменяемыми, т.е. два упомянутых связанных крутильных колебания, находящихся в противофазе, вокруг оси у могут быть использованы в качестве моды возбуждения, а два связанных линейных колебания, находящиеся в противофазе, могут быть использованы в качестве моды детектирования.
На фиг.2а схематично представлен Кориолисов гироскоп на основе замкнутой пружинно-массовой системы, содержащий два вторых элемента 62 массы, которые соединены между собой соединительными упругими элементами 2 и соединены через вторые упругие элементы 21 подложки связаны с подложкой 5 (в этом случае показана связь только через крепление 22). Два связанных крутильных колебания в противофазе элементов 62 массы вокруг крепления 22 подложки и оси z, использованы в качестве моды 7 возбуждения. При вращении Кориолисова гироскопа вокруг своей оси Ω чувствительности, два связанных крутильных колебания в противофазе вокруг оси у приводятся в возбуждение (Rot-Rot) в качестве моды детектирования и находятся под прямым углом к оси Ω чувствительности и под прямым углом к оси z вращения моды 7 возбуждения. Вторые упругие элементы 21 подложки выполнены податливыми при вращении вокруг осей z и у, но максимально жесткими во всех других направлениях, а соединительные упругие элементы 2 могут быть выполнены одинаково податливыми во всех направлениях, т.е. податливыми при всех нагрузках. В этом Кориолисове гироскопе полезные моды (т.е. моды 7 возбуждения и моды 8 детектирования) представляют собой замкнутые моды.
На фиг.2b схематично представлен Кориолисов гироскоп по фиг.2а с той же самой модой 7 возбуждения, т.е. двумя связанными крутильными колебаниями в противофазе элементов 62 массы, используемых вокруг крепления 22 подложки и вокруг оси z. Дополнительные вторые упругие элементы 21а подложки выполнены податливыми при вращении вокруг осей z, х и у, но максимально жесткими в других направлениях. Представленный Кориолисов гироскоп имеет вторую замкнутую моду 8_2 детектирования, которая возбуждается при вращении Кориолисова гироскопа вокруг второй оси Ω2 чувствительности, и содержит два связанных крутильных колебания, находящихся в противофазе, вокруг оси х. Следовательно, представленный Кориолисов гироскоп может быть также назван "двухосным" гироскопом и, таким образом, имеет три замкнутых моды, которые могут быть использованы в качестве моды возбуждения и, в зависимости от оси чувствительности, в качестве моды детектирования.
Второй пример осуществления изобретения показан на фиг.3, на котором схематично представлен Кориолисов гироскоп на основе замкнутой пружинно-массовой системы, содержащий четыре третьих элемента 63 массы, связанных через ху соединительные упругие элементы 23 и между собой, и с подложкой 5 (в этом случае показана только через крепление 24). Линейные колебания элементов 63 массы под углом 45° к направлениям х и у могут быть использованы в качестве моды 7 возбуждения. В этом случае, в приведенном примере два наклонных противоположных третьих элемента 63 массы движутся навстречу друг другу при удалении двух других противоположных элементов 63 массы друг от друга. При вращении Кориолисова гироскопа вокруг оси Ω чувствительности, которая расположена под прямым углом к направлениям х и у (а следовательно, параллельна направлению z), линейное колебание может быть возбуждено) в качестве моды детектирования и смещено относительно моды возбуждения (Lin-Lin). В этом случае третьи элементы 63 массы, расположенные рядом в направлении х, движутся по направлению друг к другу в направлении х в случае удаления третьих элементов 63 массы, расположенных рядом в направлении у, друг от друга в направлении у, а третьи элементы 63 массы, расположенные рядом в направлении х, удаляются друг от друга вдоль оси х в случае движения третьих элементов 63 массы, расположенных рядом в направлении у, по направлению друг к другу в направлении у. Указанные ху соединительные упругие элементы 23 выполнены податливыми в направлении осей х и у, и жесткими в других направлениях. При наличии такого Кориолисова гироскопа полезные моды (т.е. моды 7 возбуждения и моды 8 детектирования) также являются замкнутыми.
Третий пример осуществления изобретения показан на фиг.4, на котором схематично представлен Кориолисов гироскоп на основе замкнутой пружинно-массовой системы, содержащий четыре четвертых элемента 64 массы, связанных через ху соединительные упругие элементы 25 и между собой, и с подложкой 5 (в данном случае показана только через крепление 26). Линейные колебания четвертых элементов 64 массы в направлении х могут быть использованы в качестве моды 7 возбуждения. В этом случае два расположенных рядом в направлении х четвертых элемента 64 массы выполнены с возможностью движения навстречу друг другу при удалении двух других четвертых элементов 64 массы друг от друга в направлении х. При вращении Кориолисова гироскопа вокруг оси Ω чувствительности, которая расположена под прямым углом к направлениям х и у (а следовательно, параллельна направлению z), линейное колебание возбуждено в качестве моды детектирования и смещено относительно моды возбуждения (Lin-Lin). В этом случае два смежных в направлении у четвертых элемента 64 массы движутся навстречу друг другу при удалении двух других четвертых элементов 64 массы друг от друга. Дополнительные ху соединительные упругие элементы 25 выполнены податливыми в направлении осей х и у и жесткими в других направлениях. При наличии такого Кориолисова гироскопа полезные моды (т.е. моды 7 возбуждения и моды 8 детектирования) также являются замкнутыми.
Далее, на фиг.5-11 более подробно рассмотрен четвертый пример осуществления изобретения с учетом вариантов 1-7. Настоящее изобретение не ограничено этим четвертым примером его осуществления, и специалист в данной области техники, даже не обладающий опытом изобретательства, сумеет исходя из приведенного описания выявить соответствующие варианты первого-третьего примеров осуществления изобретения.
В вариантах 1-7 ось Ω чувствительности расположена под прямым углом к плоскости чертежа.
Все элементы, выделенные светло-серым цветом, представляют собой подвижные "элементы массы", которые, в первом приближении, можно рассматривать как бесконечно жесткие. Участки, выделенные темно-серым цветом, как правило, не обладают способностью перемещаться относительно подложки. Линиями обозначены упругие стержни, которые использованы в качестве компонентов упругих элементов. В хорошем приближении эти упругие стержни выполнены бесконечно жесткими в продольном направлении. Если размер упругого стержня в направлении z значительно превышает размер в плоскости чертежа под прямым углом к продольному направлению, то упругие стержни значительно более жесткие в направлении z, чем в направлении оси в плоскости чертежа под прямым углом к продольному направлению. В хорошем приближении, массу/момент инерции упругих стержней, а также элементов массы, которые составляют часть упругой структуры, зачастую можно не учитывать.
Эти приближения будут использованы в последующем тексте, например, с указанием "по существу".
Многочисленные способы изготовления, к которым, в частности, принадлежат и микротехнические методы, могут быть использованы для изготовления вариантов. Все варианты могут быть созданы, например, с помощью микротехнического способа, приведенного в еще неопубликованной заявке на патент Германии "Способ изготовления конструктивного элемента и конструктивный элемент" с той же датой подачи и тем же заявителем, что и в настоящем изобретении, или посредством "стандартных поверхностно-микромеханических процессов" (например, Robert Bosch GmbH, Analog Devices).
Первый вариант, представленный на фиг.5, содержит подложку (не показана), а также первую отдельную структуру 500, вторую отдельную структуру 600, третью отдельную структуру 700 и четвертую отдельную структуру 800. Первая отдельная структура 500 содержит первый модуль 510 возбуждения, который прикреплен к подложке посредством первого упругого относительно х элемента 511 в первой точке 513 крепления. Первый элемент 520, основанный на эффекте Кориолиса, связан через первый упругий у элемент 521 с первым модулем 510 возбуждения. Первый модуль 530 регистрации связан с первым элементом 520, основанным на эффекте Кориолиса, через первый упругий элемент 531, вращающийся относительно х.
Вторая, третья и четвертая отдельные структуры 600, 700, 800 выполнены аналогично в отношении соответствующих второго, третьего и четвертого модулей 610, 710, 810 возбуждения, соответствующих второго, третьего и четвертого упругих относительно х элементов 611, 711, 811, соответствующих второй, третьей и четвертой точек 613, 713, 813 крепления, соответствующих второго, третьего и четвертого упругих относительно у элементов 621, 721, 821, соответствующих второго, третьего и четвертого элементов 620, 720, 820, основанных на эффекте Кориолиса, соответствующих второго, третьего и четвертого вращающихся относительно х упругих элементов 631, 731, 831, и соответствующих второго, третьего и четвертого модулей 630, 730, 830 регистрации.
Первый модуль 510 возбуждения связан со вторым модулем 610 возбуждения таким же образом, как третий модуль 710 возбуждения связан с четвертым модулем 810 возбуждения, в каждом случае напрямую посредством первых соединительных упругих элементов 561 и 781, соответственно. Первый и четвертый модули 510, 810 возбуждения, а также второй и третий модули 610, 710 возбуждения связаны между собой напрямую с помощью вторых соединительных упругих элементов 58 и 67, соответственно. Первый и второй модули 530, 630 регистрации, а также третий и четвертый модули 730, 830 возбуждения связаны между собой напрямую с помощью третьих соединительных упругих элементов 564 и 784, соответственно, образуя первый и второй связанные модули регистрации. Первый связанный модуль 530, 630 регистрации непосредственно связан со вторым связанным модулем 730, 830 регистрации посредством четвертого соединительного упругого элемента 5678.
Упругие относительно х элементы 511, 611, 711, 811 выполнены податливыми в направлении х и максимально жесткими в направлении у и z. Для улучшения направляющих свойств они связаны с монолитными элементами 512, 612, 712, 812. Упругие относительно у элементы 521, 621, 721, 821 выполнены податливыми в направлении у и максимально жесткими в направлении х и z. Упругие относительно у элементы 521, 621, 721, 821, которые также могут быть выполнены с одной стороны, соответствуя дополнительным упругим относительно у элементам 551, 651, 751, 851, показанным на фиг.11. Вращающиеся относительно х упругие элементы 531, 631, 731, 831 выполнены податливыми в направлении х и, при условии вращения вокруг их соответствующей оси 12, 13, 14, 15 симметрии (двух отдельных упругих элементов, которые на чертеже расположены один над другим) в направлении z, и жесткими при всех других нагрузках. Следовательно, вращающиеся относительно х упругие элементы 531, 631, 731, 831 обладают характеристикой соединения, которая одновременно может обеспечивать относительное вращение и изменение расстояния в направлении х между элементами 520, 620, 720, 820, основанными на эффекте Кориолиса и модулями 530, 630, 730, 830 регистрации.
Первые соединительные упругие элементы 561, 781 выполнены податливыми в направлении х и жесткими в направлении у и z. Третьи соединительные упругие элементы 564, 784, которые содержат упругие стержни 565, 785 и крепление на подложке 566, 786, выполнены податливыми при условии их вращения вокруг своей оси симметрии в направлении 10, 11, соответствующем направлению z, и жесткими при всех других нагрузках, и поэтому их именуют также вращательными упругими элементами.
Вторые соединительные упругие элементы 58, 67 выполнены податливыми в направлении х и у, и жесткими в направлении z. Как и в случае всех упругих структур, на чертежах приведены примеры конструкции. В качестве примера, вместо вторых соединительных упругих элементов 58, 67 также могут быть использованы видоизмененные соединительные пружины, которые соответствуют пружинам 141, 241, показанным на фиг.10.
Четвертый соединительный упругий элемент 5678 выполнен податливым в направлении у и, при условии его вращения вокруг своей оси симметрии, в направлении 16, соответствующему направлению z, и жестким при всех других нагрузках. Он также выполнен с возможностью блокирования синфазного вращения модулей 530, 630 и 730, 830 регистрации.
Мода возбуждения соответствует двум линейным колебаниям в противофазе в направлении оси х первого и второго модулей 510, 610 возбуждения вместе с первым и вторым элементами 520, 620, основанными на эффекте Кориолиса и, соответственно, третьего и четвертого модулей 710, 810 возбуждения вместе с третьим и четвертым элементами 720, 820, основанными на эффекте Кориолиса, в направлении оси х, причем необходимо снова подчеркнуть, что указанные колебания находятся в противофазе друг относительно друга. Управление резонансной частотой моды возбуждения по существу осуществляется за счет массы модулей 510, 610, 710, 810 возбуждения и элементов 520, 620, 720, 820, основанных на эффекте Кориолиса, а также упругой жесткости упругих элементов 511, 611, 711, 811, дополнительных упругих элементов 531, 631, 731, 831, первых соединительных упругих элементов 561, 781 и вторых соединительных упругих элементов 58, 67.
Мода детектирования соответствует смешанной форме крутильных и линейных колебаний. Они представляют собой два крутильных колебания первого и второго модулей 530, 630 регистрации вокруг их оси 10 симметрии в направлении z, а также третьего и четвертого модулей 730, 830 регистрации вокруг их оси 11 симметрии в направлении z, причем эти крутильные колебания находятся в противофазе друг относительно друга при одновременном совершении первым и вторым элементами 520, 620, основанными на эффекте Кориолиса, и третьим и четвертым элементами 720, 820, основанными на эффекте Кориолиса, колебаний крутильного типа. Они ориентированы в направлении у первым и вторым упругими относительно у элементами 521, 621, а также третьим и четвертым упругими относительно у элементами 721, 821 относительно первого и второго модулей 510, 610 возбуждения и, соответственно, третьего и четвертого модулей 710, 810 возбуждения, и могут быть приведены во вращение первым и вторым упругими элементами 531, 631, вращающимися относительно х, и, соответственно, третьим и четвертым упругими элементами 731, 831, вращающимися относительно х, относительно соответствующего первого и второго модулей 530, 630 регистрации и третьего и четвертого модулей 730, 830 регистрации, соответственно. Управление резонансной частотой моды возбуждения осуществляется по существу за счет масс/моментов инерции элементов 520, 620, 720, 820, основанных на эффекте Кориолиса и модулей 530, 630, 730, 830 регистрации, а также упругих жесткостей четвертого соединительного упругого элемента 5678, третьих соединительных упругих элементов 564, 784, вращающихся относительно х упругих элементов 531, 631, 731, 831 и упругих относительно у элементов 521, 621, 721, 821.
Первая, вторая, третья и четвертая отдельные структуры 500, 600, 700, 800 снабжены, соответственно, первым, вторым, третьим и четвертым датчиком 514, 614, 714, 814 силы, которые вызывают возбуждение моды возбуждения. Эти датчики 514, 614, 714, 814 силы могут быть выполнены в виде ответвителя для возбуждения колебаний или возможно использование дополнительных ответвителей. В приведенном примере в качестве датчиков 514, 614, 714, 814 силы использованы так называемые электростатические двигатели.
В целях реализации настоящей заявки на изобретение, под используемыми выражениями "электростатический двигатель" и "пластинчато-конденсаторная конструкция" следует понимать следующее.
- "Электростатический двигатель" представляет собой структуру с конденсаторами в виде пластин с "погружными" электродами, т.е. с перекрытием электродов изменяется. Обычно с обеих сторон погруженного электрода выбирают одинаковые расстояния между электродами.
- "Пластинчато-конденсаторная конструкция представляет собой конструкцию из конденсаторов в виде пластин, в которой при перемещении происходит изменение расстояния между электродами. Для решения этой задачи может быть или предусмотрено различное расстояние между электродами с обеих сторон одного подвижного электрода (может быть выбрано и одинаковое расстояние между электродами, но только в случае необходимости расстроить только частоту), или с обеих сторон подвижного электрода могут быть использованы неподвижные электроды, каждый с разным потенциалом.
Электростатические двигатели (см. фиг.5) содержат подвижные электроды 515, 615, 715, 815, которые встроены в модули 510, 610, 710, 810 возбуждения, и электроды 516, 616, 716, 816, которые закреплены на подложке. В то же самое время, электростатические двигатели могут быть использованы в качестве датчиков силы и ответвителей.
Первая, вторая, третья и четвертая отдельные структуры 500, 600, 700, 800 снабжена соответствующим первым, вторым, третьим и четвертым ответвителем 534, 634, 734, 834, позволяющим определять детектируемые колебания. Эти ответвители могут быть также выполнены в виде датчиков силы, компенсирующих Кориолисову силу для режима восстановления, или, в случае необходимости, могут быть использованы дополнительные датчики силы. В приведенном примере пластинчато-конденсаторные конструкции представлены в виде ответвителей и выполнены с возможностью изменения расстояния между обкладками в ходе перемещения при детектировании. Каждый из ответвителей содержит первый, второй, третий и четвертый подвижные электроды 535, 635, 735, 835, которые встроены в соответствующие модули 530, 630, 730, 830 регистрации и первый, второй, третий и четвертый электроды 536, 636, 736, 836, которые закреплены на подложке. В то же самое время пластинчато-конденсаторные конструкции могут быть использованы в качестве датчиков силы и ответвителей.
Необходимо подчеркнуть, что электростатические двигатели могут быть также использованы в качестве ответвителей (и/или датчиков силы) для детектируемых колебаний, так как модули регистрации не могут совершать перемещений при возбуждении. Пластинчато-конденсаторная конструкции с изменяемым расстоянием между обкладками, используемые в качестве ответвителя для детектируемого колебания, могут быть выполнены с возможностью изменения резонансной частоты моды детектирования с помощью приложенного электрического напряжения. С одной стороны, это свойство может быть специально использовано для задания частоты (удвоения частоты резонанса). В свою очередь, в качестве примера, резонансная частота может быть модулирована модулирующими сигналами для функции ответвителя, или восстанавливающими напряжениями (зависящими от скорости вращения). У электростатических двигателей этот недостаток отсутствует. При использовании электростатических двигателей дополнительно могут быть встроены пластинчато-конденсаторные конструкции, выполненные с возможностью изменения расстояния между обкладками для обеспечения вышеописанной возможности регулирования частоты.
Необходимо также отметить, что для соответствующих элементов, основанных на эффекте Кориолиса, могут быть предусмотрены дополнительные датчики силы, ответвители и/или устройства 524, 624, 724, 824 перестройки частоты. Приведенный пример относится к пластинчато-конденсаторным конструкциям, выполненным с возможностью изменения расстояния между обкладками. Системы содержат подвижные электроды, которые встроены в элементы 510, 626, 726, 826, основанные на эффекте Кориолиса, и электроды 526, 616, 716, 816, которые закреплены на подложке.
Структура по первому варианту обладает модами с резонансными частотами вблизи полезных мод, которые могут быть возбуждены линейными ускорениями в направлении х и ускорениями вращательного движения вокруг оси z. В этом случае, модули 510, 610, 710, 810 возбуждения и элементы 520, 620, 720, 820, основанные на эффекте Кориолиса, смещены в направлении х. Однако по сравнению с паразитной модой, при которой модули регистрации смещены в направлении у, результирующее ускорение и погрешности, зависящие от вибрации, будут малы.
В первом варианте, в каждом случае два модуля регистрации совместно могут совершать крутильные колебания. Это означает, что в приведенном примере при наличии ответвителей 534, 634, 734, 834 с неподвижными электродами 536, 636, 736, 836, изменение расстояния между обкладками пластинчато-конденсаторной конструкции зависит от положения, что создает дополнительную сложность при конструировании и линеаризации. Эта дополнительная сложность отсутствует, например, при использовании вышеупомянутых электростатических двигателей в качестве ответвителей/датчиков силы и регулировании частоты с помощью устройств 524, 624, 724, 824.
Кроме того, модули регистрации могут совершать линейное колебание (см. фиг.6, где представлен второй вариант четвертого примера осуществления) с помощью дополнительных пружин 541, 641, 741, 841, которые выполнены податливыми в направлении х и, при вращении вокруг их оси симметрии, в направлении z, но максимально жесткими в других направлениях, кроме того, модули 530, 630, 730, 830 регистрации могут быть дополнительно закреплены на подложке с помощью упругих элементов 542, 642, 742, 842, которые выполнены податливыми в направлении у, но максимально жесткими в других направлениях. Упругие элементы 531b, 631b, 731b, 831b, которые связывают модули 530, 630, 730, 830 регистрации с элементами 520, 620, 720, 820, основанными на эффекте Кориолиса, могут быть выполнены двусторонними, т.к. у них отсутствует необходимость иметь какую-либо "общую характеристику".
Третий вариант, представленный на фиг.7, в значительной степени соответствует первому варианту и имеет следующие модификации:
- Упругие элементы 58b, 67b, которые соединяют первый и четвертый модули 510, 810 возбуждения и второй и третий модули 610, 710 возбуждения, выполнены так, что линейное ускорение в направлении х не вызывает смещения модулей 510, 610, 710, 810 возбуждения и элементов 520, 620, 720, 820, основанных на эффекте Кориолиса, в направлении х.
В третьем варианте структура обладает модами с резонансными частотами вблизи полезных мод, которые могут быть возбуждены ускорениями вращательного движения вокруг оси z. В этом случае, модули 510, 610, 710, 810 возбуждения и элементы 520, 620, 720, 820, основанные на эффекте Кориолиса, могут быть смещены в направлении х. Однако по сравнению с паразитной модой, при которой модули регистрации смещены в направлении у, результирующее ускорение и погрешности, зависящие от вибрации, будут малы.
Четвертый вариант, представленный на фиг.8, в значительной степени соответствует третьему варианту и имеет следующие модификации:
- Упругие элементы 561b, 781b, которые соединяют первый и второй модули 510, 610 возбуждения и третий и четвертый модули 710, 810 возбуждения выполнены так, что ускорение вращательного движения вокруг оси z практически не приводит к смещению модулей 510, 610, 710, 810 возбуждения и элементов 520, 620, 720, 820, основанных на эффекте Кориолиса, в направлении х. В этом случае, измененные упругие элементы 561b, 781b содержат вращающиеся относительно у упругие элементы 562, 782, которые выполнены податливыми при вращении вокруг оси их симметрии (в направлении z) и при смещении в направлении у, но максимально жесткими во всех других направлениях, и вращательные пружины 563, 783, которые выполнены аналогично вращательным пружинам 564, 784.
На фиг.9 представлен пятый вариант, который в значительной степени соответствует первому варианту, но пружина 5678а не блокирует синфазное вращение модулей 530, 630 и 730, 830 регистрации, а выполнена с возможностью дробления частоты между синфазной и дифференциальной модами. В этом случае, резонансные частоты полезных мод еще не намного меньше резонансных частот мод, которые могут быть возбуждены благодаря ускорению и/или колебаниям и могут вызывать значительный сигнал ошибки.
На фиг.10 представлен шестой вариант. В этом случае, первая, вторая, третья и четвертая отдельные структуры 100, 200, 300, 400 содержит только соответствующую простую первую, вторую, третью и четвертую колебательные структуры 110, 210, 310, 410. Связывание колебательных структур 110, 210, 310, 410 для создания замкнутых моды возбуждения и моды детектирования может быть обеспечено ху упругими элементами 141, 241, которые выполнены податливыми в плоскости ху, но максимально жесткими во всех других направлениях. Кроме того, мода детектирования может быть связана с помощью вращающейся относительно у пружины 1234. Простое связывание, приведенное в качестве примера, подразумевает наличие мод, резонансные частоты которых меньше полезных мод. Во всем остальном, шестой вариант соответствует первому варианту. Моду детектирования можно рассматривать как два крутильных колебания в противофазе.
На фиг.11 представлен седьмой вариант. В этом случае, первая, вторая, третья и четвертая отдельные структуры 500, 600, 700, 800 соответственно содержат только разъединенную структуру, которая состоит из четырех модулей 510, 610, 710, 810 возбуждения и четырех эталонных масс 550, 650, 750, 850. Связь с замкнутой модой возбуждения может быть обеспечена ху упругими элементами 58, 67, которые выполнены податливыми в направлениях х и у, но максимально жесткими во всех других направлениях, а замкнутая мода детектирования может быть обеспечена пружиной 5678а, которая выполнена с возможностью относительно ху, а также податливой в направлениях х и у, и в случае вращения вокруг своей оси симметрии в направлении z, но максимально жесткой во всех других направлениях. Простое связывание, приведенное в качестве примера, подразумевает наличие мод, резонансные частоты которых меньше полезных мод. Во всем остальном, седьмой вариант соответствует первому варианту. Моду детектирования можно рассматривать как смешанную форму.
Изобретение относится к Кориолисову гироскопу, имеющему конструкцию, содержащую подложку (5, 22, 24, 26), по меньшей мере две отдельные структуры (61, 62, 63, 64, 500, 600, 700, 800) и упругие элементы (например, 1, 2, 3, 21, 23, 25), которые связывают отдельные структуры (61, 62, 63, 64, 500, 600, 700, 800) с подложкой (5, 22, 24, 26) и между собой, используя датчики силы (например, 514, 614, 714, 814) и ответвители (например, 534, 634, 734, 834), причем указанная конструкция имеет по меньшей мере одну моду (7) возбуждения, которая может быть возбуждена датчиками (например, 514, 614, 714, 814), силы и по меньшей мере одну моду (8) детектирования, которая может быть измерена ответвителями (например, 534, 634, 734, 834), при этом мода (7) возбуждения и мода (8) детектирования блокированы, в результате чего не может быть вызвано никакого искажающего возбуждения моды возбуждения и моды детектирования посредством линейных ускорений и/или вибраций, если необходимости учитывать производственные допуска. 13 з.п. ф-лы, 11 ил.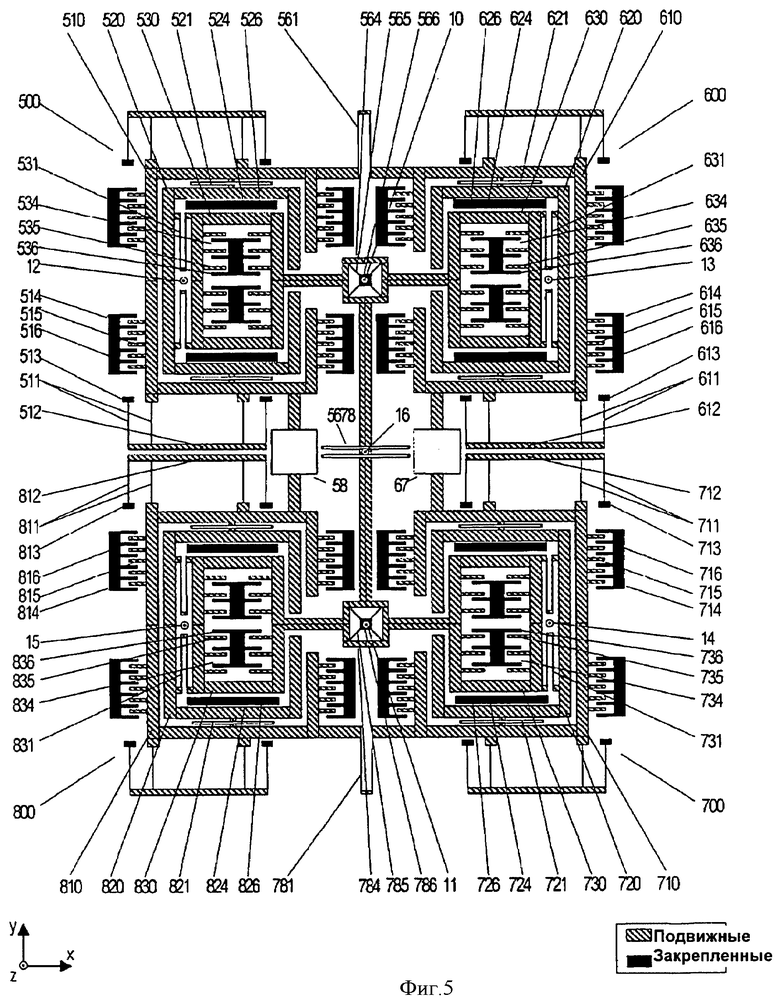
1. Кориолисов гироскоп, имеющий конструкцию, содержащую подложку (5, 24, 26), по меньшей мере четыре отдельные структуры (61, 63, 64, 500, 600, 700, 800) и упругие элементы (например, 1, 2, 3, 23, 25), которые связывают отдельные структуры (61, 63, 64, 500, 600, 700, 800) с подложкой (5, 24, 26) и между собой, а также датчики (например, 514, 614, 714, 814) силы и ответвители (например, 534, 634, 734, 834), причем указанная конструкция имеет по меньшей мере одну моду (7) возбуждения, которая может быть возбуждена датчиками силы (например, 514, 614, 714, 814), и по меньшей мере одну моду (8) детектирования, которая может быть измерена ответвителями (например, 534, 634, 734, 834) и возбуждена при возбуждении моды возбуждения на основе Кориолисовой силы при вращении Кориолисова гироскопа вокруг оси (Ω) чувствительности, при этом мода (7) возбуждения содержит два противофазных связанных линейных колебания, находящихся в противофазе, каждая с двумя отдельными структурами, отличающийся тем, что мода (8) детектирования содержит смешанную форму двух связанных противофазных крутильных колебаний и двух противофазных линейных колебаний, находящихся в противофазе, каждая с двумя отдельными структурами, причем мода (7) возбуждения и мода (8) детектирования представляют собой замкнутые собственные моды указанной конструкции, посредством которых теоретически, а именно при оптимальном изготовлении без каких-либо производственных допусков, никакими силами или моментами не может быть оказано воздействие на пространство, окружающую Кориолисов гироскоп.
2. Кориолисов гироскоп по п.1, отличающийся тем, что в нем предусмотрены датчики (например 534, 634, 734, 834) силы, предназначенные для восстановления Кориолисовой силы.
3. Кориолисов гироскоп по п.1 или 2, отличающийся тем, что в нем предусмотрены ответвители (например 514, 614, 714, 814), предназначенные для измерения перемещения моды возбуждения.
4. Кориолисов гироскоп по п.1 или 2, отличающийся тем, что в нем предусмотрены исполнительные элементы (524, 624, 724, 824, 534, 634, 734, 834), предназначенные для квадратурной компенсации.
5. Кориолисов гироскоп по п.1 или 2, отличающийся тем, что в нем предусмотрены исполнительные элементы (524, 624, 724, 824, 534, 634, 734, 834), предназначенные для регулировки частоты.
6. Кориолисов гироскоп по п.1 или 2, отличающийся тем, что резонансные частоты моды (7) возбуждения и моды (8) детектирования значительно ниже резонансных частот мод, которые могут быть возбуждены за счет ускорений и/или колебаний и могут вызывать значительный сигнал ошибки.
7. Кориолисов гироскоп по п.1 или 2, отличающийся тем, что резонансные частоты моды (7) возбуждения и моды (8) детектирования значительно ниже резонансных частот всех других собственных мод указанной конструкции.
8. Кориолисов гироскоп по п.1, отличающийся тем, что направления линейных колебаний моды (7) возбуждения и оси (Ω) чувствительности параллельны поверхности подложки, а оси крутильных колебаний параллельны оси (Ω) чувствительности.
9. Кориолисов гироскоп по п.1, отличающийся тем, что направления линейных колебаний моды (7) возбуждения и моды (8) возбуждения параллельны поверхности подложки, а оси крутильных колебаний расположены под прямыми углами к поверхности подложки.
10. Кориолисов гироскоп по любому из пп.1-2 и 8-9, отличающийся тем, что каждая из отдельных структур (500, 600, 700, 800) сформирована из модуля (510, 610, 710, 810) возбуждения и эталонной массы (550, 650, 750, 850) и выполнена таким образом разъединенной.
11. Кориолисов гироскоп по любому из пп.1-2 и 8-9, отличающийся тем, что каждая из отдельных структур (500, 600, 700, 800) сформирована из модуля (510, 610, 710, 810) возбуждения, элемента (520, 620, 720, 820), основанного на эффекте Кориолиса, и модуля (530, 630, 730, 830) регистрации и выполнена таким образом дважды разъединенной.
12. Кориолисов гироскоп по п.9, отличающийся тем, что каждая из отдельных структур (500, 600, 700, 800) сформирована из модуля (510, 610, 710, 810) возбуждения, элемента (520, 620, 720, 820), основанного на эффекте Кориолиса, и модуля (530, 630, 730, 830) регистрации и выполнена таким образом дважды разъединенной, а между элементами (520, 620, 720, 820), основанными на эффекте Кориолиса, и соответствующими модулями (530, 630, 730, 830) регистрации в каждом случае предусмотрен вращающийся относительно х упругий элемент (531, 631, 731, 831), который обеспечивает относительное вращение и изменение расстояния в направлении линейных колебаний моды (7) возбуждения.
13. Кориолисов гироскоп по п.9, отличающийся тем, что каждая из отдельных структур (500, 600, 700, 800) сформирована из модуля (510, 610, 710, 810) возбуждения, элемента (520, 620, 720, 820), основанного на эффекте Кориолиса, и модуля (530, 630, 730, 830) регистрации и выполнена таким образом дважды разъединенной, между двумя модулями (530, 630, 730, 830) регистрации предусмотрен вращающийся упругий элемент (564, 784), между одним из двух модулей (530, 630, 730, 830) регистрации и вращающимся упругим элементом (564, 784) в каждом случае предусмотрена вращающаяся относительно х пружина (541, 641, 741, 841), и модули (530, 630, 730, 830) регистрации закреплены на подложке посредством упругих элементов (542, 642, 742, 842).
14. Кориолисов гироскоп по любому из пп.1-2, 8-9 и 12-13, отличающийся тем, что в нем предусмотрены четыре отдельные структуры (61, 63, 64, 500,600, 700, 800).
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство для определения координат металлических протяженных изделий | 1990 |
|
SU1793202A1 |
| Измерительный волноводный амплитудно-фазовый дискриминатор | 1987 |
|
SU1515119A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ изготовления листового кровельно-изоляционного материала | 1935 |
|
SU49227A1 |

